







专利摘要
一种基于竹鼠养殖的智能农业种植方法及其系统,包括:控制中心接收到启动指令则控制第一摄像头及第二摄像头摄取影像,控制中心获取时间信息并分析是否有到达竹鼠喂养时间,若有则控制种植机器人前往种植区域并控制运输电机驱动运输履带运行,控制中心控制抓取机械臂抓取竹子并控制切割机械臂将竹子切割,控制中心控制种植机器人移动至运输通道侧方并控制切割机械臂将竹子切割分段至运输履带,控制中心控制切割电机启动并控制第四摄像头摄取影像,控制中心控制养殖机器人前往切割分离通道侧方并分析存储框是否有处于满载状态,若有则控制运输机械臂与存储框固定连接并控制养殖机器人前往养殖槽,且控制喂养机械臂抓取存储框的竹片投放至养殖槽。
权利要求
1.一种基于竹鼠养殖的智能农业种植方法,其特征在于,所述方法包括以下步骤:
S1、无线装置接收到养殖管理部门的外部设备发送的启动指令则将其返回给控制中心,所述控制中心接收到则控制设置于种植区域的第一摄像头实时摄取第一影像并控制设置于养殖棚的第二摄像头实时摄取第二影像;
S2、所述控制中心利用无线装置联网实时获取实时时间信息并根据获取的实时信息分析是否有到达养殖管理部门设定的竹鼠喂养时间;
S3、若有则所述控制中心控制设置于存储仓库内部位置的种植机器人启动并控制启动的种植机器人侧方的第三摄像头实时摄取第三影像;
S4、所述控制中心控制启动的种植机器人根据第三摄像头摄取的第三影像前往种植区域位置并控制设置于分别与种植区域以及养殖棚连接的运输通道内部位置的运输电机驱动连接的运输履带运行;
S5、所述控制中心控制设置于到达种植区域的种植机器人侧方位置的抓取机械臂根据第三摄像头摄取的第三影像抓取种植区域种植的处于可喂养竹鼠状态的竹子并控制设置于到达种植区域的种植机器人侧方位置的切割机械臂根据第三摄像头摄取的第三影像将抓取机械臂抓取的竹子进行切割;
S6、所述控制中心控制到达种植区域的种植机器人根据第三摄像头摄取的第三影像移动至与种植区域连接的运输通道侧方位置并控制设置于到达运输通道侧方的种植机器人侧方的切割机械臂将抓取机械臂抓取的竹子进行切割分段至运输履带表面;
S7、所述控制中心控制设置于运输通道与养殖棚连接处的切割分离通道内部位置的切割电机驱动切割刀片运行以及控制设置于存储仓库内部位置的养殖机器人启动并控制设置于启动的养殖机器人侧方位置的第四摄像头实时摄取第四影像;
S8、所述控制中心控制启动的养殖机器人根据第四摄像头摄取的第四影像前往切割分离通道侧方位置并根据第四影像分析存储于设置于切割分离通道侧方的存储放置坑位置的存储框是否有处于满载状态;
S9、若有则所述控制中心控制设置于到达切割分离通道侧方的养殖机器人侧方的运输机械臂根据第四摄像头摄取的第四影像与处于满载状态的存储框固定连接并控制到达切割分离通道侧方的养殖机器人根据第四摄像头摄取的第四影像前往养殖棚的养殖槽,且控制设置于到达养殖槽的养殖机器人侧方位置的喂养机械臂根据第四摄像头摄取的第四影像抓取运输机械臂固定连接的存储框内存储的切割分离完成的竹片投放至养殖槽的安全位置。
2.根据权利要求1所述的一种基于竹鼠养殖的智能农业种植方法,其特征在于,在S1后,所述方法还包括以下步骤:
S10、所述控制中心控制设置于养殖棚内部的温度传感器实时获取温度信息并根据温度传感器实时获取的温度信息分析养殖棚当前温度是否有超过预设温度;
S11、若有则所述控制中心控制设置于养殖棚内部位置的空调设备启动实时为养殖棚进行降温并将温度恒温至预设温度区间。
3.根据权利要求1所述的一种基于竹鼠养殖的智能农业种植方法,其特征在于,在S1后,所述方法还包括以下步骤:
S12、所述控制中心控制设置于养殖棚内部的湿度传感器实时获取湿度信息并根据湿度传感器实时获取的湿度信息分析养殖棚当前湿度是否有超过第一预设湿度;
S13、若有则所述控制中心控制设置于养殖棚内部位置的抽湿设备启动实时为养殖棚进行抽湿至预设湿度区间。
4.根据权利要求1所述的一种基于竹鼠养殖的智能农业种植方法,其特征在于,在S1后,所述方法还包括以下步骤:
S14、所述控制中心控制设置于养殖棚内部的湿度传感器实时获取湿度信息并根据湿度传感器实时获取的湿度信息分析养殖棚当前湿度是否有低于第二预设湿度;
S15、若有则所述控制中心控制设置于养殖棚内部位置的加湿设备启动实时为养殖棚进行加湿至预设湿度区间。
5.根据权利要求1所述的一种基于竹鼠养殖的智能农业种植方法,其特征在于,在S1后,所述方法还包括以下步骤:
S16、所述控制中心根据第二摄像头实时摄取的第二影像实时分析养殖棚的养殖槽内部的竹鼠是否有发生伤害行为;
S17、若有则所述控制中心提取第二影像中发生伤害行为的竹鼠所在的养殖槽编号以及控制设置于存储仓库内部位置的养殖机器人启动并控制设置于启动的养殖机器人侧方位置的第四摄像头实时摄取第四影像;
S18、所述控制中心控制启动的养殖机器人根据第四摄像头摄取的第四影像以及提取的养殖槽编号前往与提取的养殖槽编号一致的养殖槽位置并控制设置于到达与提取的养殖槽编号一致的养殖槽的养殖机器人侧方位置的喂养机械臂根据第四摄像头摄取的第四影像抓取与提取的养殖槽编号一致的养殖槽内部的竹鼠尾部将竹鼠提起;
S19、所述控制中心控制设置于与提取的养殖槽编号一致的养殖槽内部中间的隔离通道内部位置的隔离伸缩电机驱动连接的隔离伸缩板完全伸出形成隔离间并控制设置于到达与提取的养殖槽编号一致的养殖槽的养殖机器人侧方位置的喂养机机械臂根据第四摄像头摄取的第四影像将抓取的竹鼠分别单放置于隔离间内。
6.根据权利要求1所述的一种基于竹鼠养殖的智能农业种植方法,其特征在于,在S1后,所述方法还包括以下步骤:
S20、所述控制中心根据第二摄像头实时摄取的第二影像实时分析是否有养殖棚的养殖槽内部的竹鼠处于怀孕状态;
S21、若有则所述控制中心提取第二影像中处于怀孕状态的竹鼠所在的养殖槽编号以及控制设置于存储仓库内部位置的养殖机器人启动并控制设置于启动的养殖机器人侧方位置的第四摄像头实时摄取第四影像;
S22、所述控制中心控制启动的养殖机器人根据第四摄像头摄取的第四影像以及提取的养殖槽编号前往与提取的养殖槽编号一致的养殖槽位置并控制设置于到达与提取的养殖槽编号一致的养殖槽的养殖机器人侧方位置的喂养机械臂根据第四摄像头摄取的第四影像抓取与提取的养殖槽编号一致的养殖槽内部的处于怀孕状态的竹鼠尾部将竹鼠提起;
S23、所述控制中心控制将处于怀孕状态的竹鼠提起的喂养机械臂所在的养殖机器人根据第四摄像头摄取的第四影像前往养殖区域的护理间位置并控制设置于到达护理间位置的养殖机器人侧方位置的抓取有处于怀孕状态的竹鼠的喂养机械臂根据第四摄像头摄取的第四影像将抓取的竹鼠缓慢放置于护理间内部。
7.根据权利要求1所述的一种基于竹鼠养殖的智能农业种植方法,其特征在于,在S1后,所述方法还包括以下步骤:
S24、所述控制中心利用无线装置联网实时获取实时时间信息并根据获取的实时信息分析是否有到达养殖管理部门设定的竹子防护时间;
S25、若有则所述控制中心控制设置于存储仓库内部位置的种植无人机启动并控制启动的种植无人机侧方的第五摄像头实时摄取第五影像;
S26、所述控制中心控制启动的种植无人机根据第五摄像头摄取的第五影像前往种植区域位置进行巡逻并控制设置于在种植区域进行巡逻的种植无人机下方的施肥喷头通过连接的施肥导管将种植无人机内部的施肥存储仓存储的肥料喷洒至下方的种植区域。
8.根据权利要求1所述的一种基于竹鼠养殖的智能农业种植方法,其特征在于,在S1后,所述方法还包括以下步骤:
S27、所述控制中心利用无线装置联网实时获取实时时间信息并根据获取的实时信息分析是否有到达养殖管理部门设定的离乳竹鼠喂养时间;
S28、若有则所述控制中心控制设置于存储仓库内部位置的养殖机器人启动并控制设置于启动的养殖机器人侧方位置的第四摄像头实时摄取第四影像;
S29、所述控制中心控制启动的养殖机器人根据第四摄像头摄取的第四影像前往离乳竹鼠养殖槽位置并控制设置于到达离乳竹鼠养殖槽的养殖机器人侧方的存储门体完全收缩开启离乳竹鼠存储仓;
S30、所述控制中心控制设置于到达离乳竹鼠养殖槽的养殖机器人侧方的喂养机械臂抓取开启的离乳竹鼠存储仓存储的离乳竹鼠饲料并控制设置于到达离乳竹鼠养殖槽的养殖机器人侧方的喂养机械臂根据第四摄像头摄取的第四影像将抓取的离乳竹鼠饲料投放于离乳竹鼠养殖槽内部。
9.根据权利要求1所述的一种基于竹鼠养殖的智能农业种植方法,其特征在于,在S9中,所述方法还包括以下步骤:
S90、所述控制中心控制到达养殖槽的养殖机器人根据第四摄像头摄取的第四影像在养殖棚内部进行喂养移动并控制设置于在养殖棚进行喂养移动的养殖机器人侧方位置的喂养机械臂根据第四摄像头摄取的第四影像抓取与养殖槽内部养殖的竹鼠数量一致的运输机械臂固定连接的存储框内存储的切割分离完成的竹片数量;
S91、所述控制中心控制设置于在养殖棚进行喂养移动的养殖机器人侧方位置的喂养机械臂根据第四摄像头摄取的第四影像将抓取的竹片投放至养殖槽内部的安全位置。
10.一种基于竹鼠养殖的智能农业种植系统,包括存储仓库、种植区域、养殖棚、运输装置、防护装置、施肥装置、识别装置以及控制中心,其特征在于,
所述存储仓库设置有种植机器人、养殖机器人、种植无人机、抓取机械臂、切割机械臂、运输机械臂以及喂养机械臂,所述种植机器人设置有若干个并存储于存储仓库内部位置,用于执行种植操作;所述养殖机器人设置有若干个并存储于存储仓库内部位置,用于执行养殖操作;所述种植无人机设置有若干个并存储与存储仓库内部位置,用于执行种植物施肥操作;所述抓取机械臂为前端设置有抓取机构的伸缩机械臂,所述抓取机械臂设置有若干个并设置于种植机器人侧方位置,用于抓取物体;所述切割机械臂为前端设置有切割设备的伸缩机械臂,所述切割机械臂设置有若干个并设置于种植机器人侧方位置,用于进行切割物体;所述运输机械臂为前端设置有固定机构的伸缩机械臂,所述运输机械臂设置有若干个并设置于养殖机器人侧方位置,用于与存储框固定连接;所述喂养机械臂为前端设置有喂养机构的伸缩机械臂,所述喂养机械臂设置有若干个并设置于养殖机器人侧方位置,用于抓取竹片或离乳竹鼠饲料;
所述种植区域设置于存储仓库侧方位置,用于种植喂养竹鼠的种植物;
所述养殖棚设置有养殖槽、离乳竹鼠养殖槽、护理间、空调设备、抽湿设备以及加湿设备,所述养殖槽设置有若干个并设置于养殖棚内部位置,用于养殖竹鼠;所述离乳竹鼠养殖槽设置有若干个并设置于养殖棚内部位置,用于养殖离乳竹鼠;所述护理间设置有若干个并设置于养殖棚内部位置,用于养殖怀孕竹鼠;所述空调设备设置有若干个并设置于养殖棚内部位置,用于调节养殖棚内部温度;所述抽湿设备设置有若干个并设置于养殖棚内部位置,用于为养殖棚抽湿;所述加湿设备设置有若干个并设置于养殖棚内部位置,用于为养殖棚加湿;
所述运输装置包括运输通道、运输电机、运输履带、切割分离通道、切割电机、切割刀片、存储放置坑以及存储框,所述运输通道分别与种植区域以及养殖棚连接并采用防水设计,用于提供运输履带运行;所述运输电机设置于运输通道内部位置并分别与运输通道以及运输履带连接,用于驱动连接的运输履带运行;所述运输履带设置于运输通道内部位置并与运输电机连接,用于运输切割机械臂切割分段的种植物;所述切割分离通道设置于运输通道与养殖棚连接位置,用于提供切割刀片运行;所述切割电机设置于切割分离通道内部位置并分别与切割分离通道以及切割刀片连接,用于驱动连接的切割刀片运行;所述切割刀片设置有若干个并设置于切割分离通道内部位置,且分别与切割分离通道以及切割电机连接,用于切割运输履带运输的种植物;所述存储放置坑设置于切割分离通道侧方位置,用于放置存储框;所述存储框放置于存储放置坑位置,用于存储切割刀片切割分离完成的种植物;
所述防护装置包括隔离通道、隔离伸缩电机、隔离伸缩板、离乳竹鼠存储仓以及存储门体,所述隔离通道设置有若干个并设置于养殖槽底端内部位置,用于提供隔离伸缩板伸缩;所述隔离伸缩电机数量与隔离通道数量一致并设置于隔离通道内部位置,且分别与隔离通道以及隔离伸缩板连接,用于驱动连接的隔离伸缩板伸缩;所述隔离伸缩板数量与隔离伸缩电机数量一致并设置于隔离通道内部位置,且与隔离伸缩电机连接,伸出后,用于隔离养殖槽形成隔离空间;所述离乳竹鼠存储仓数量与养殖机器人数量一致并设置于养殖机器人内部位置,用于存储离乳竹鼠饲料;所述存储门体数量与离乳竹鼠存储仓数量一致并设置于养殖机器人侧方位置,且分别与养殖机器人以及离乳竹鼠存储仓连接,用于开关连接的离乳竹鼠存储仓;
所述施肥装置包括施肥存储仓、施肥喷头以及施肥导管,所述施肥存储仓数量与种植无人机数量一致并设置于种植无人机内部位置,用于存储肥料;所述施肥喷头设置有若干个并设置于种植无人机下方位置,用于喷洒肥料;所述施肥导管数量与施肥喷头数量一致并分别与施肥喷头以及施肥存储仓连接,用于将连接的施肥存储仓存储的肥料导入连接的施肥喷头内部;
所述识别装置包括第一摄像头、第二摄像头、第三摄像头、第四摄像头、第五摄像头、温度传感器以及湿度传感器,所述第一摄像头设置有若干个并设置于种植区域,用于摄取种植区域的环境运输;所述第二摄像头设置有若干个并设置于养殖棚,用于摄取养殖棚内部的环境影像;所述第三摄像头设置有若干个并设置于种植机器人侧方位置,且与种植机器人连接,用于摄取连接的种植机器人周围的环境影像;所述第四摄像头设置有若干个并设置于养殖机器人侧方位置,且与养殖机器人连接,用于摄取连接的养殖机器人周围的环境影像;所述第五摄像头设置有若干个并设置于种植无人机侧方位置,且与种植无人机连接,用于摄取连接的种植无人机周围的环境影像;所述温度传感器设置有若干个并设置于养殖棚内部位置,用于获取养殖棚内部环境温度;所述湿度传感器设置有若干个并设置于养殖棚内部位置,用于获取养殖棚内部环境湿度;
所述控制中心设置于种植管理部门规划的放置控制中心位置,用于智能化执行竹鼠养殖以及竹子种植操作,所述控制中心包括:
无线装置,用于分别与种植机器人、养殖机器人、种植无人机、抓取机械臂、切割机械臂、运输机械臂、喂养机械臂、空调设备、抽湿设备、加湿设备、运输电机、切割电机、隔离伸缩电机、存储门体、施肥喷头、第一摄像头、第二摄像头、第三摄像头、第四摄像头、第五摄像头、温度传感器、湿度传感器、种植管理部门的外部设备、急救中心、消防中心、报警中心以及网络连接;
信息接收模块,用于接收信息和/或指令和/或请求;
第一影像模块,用于控制与无线装置连接的第一摄像头摄取影像;
第二影像模块,用于控制与无线装置连接的第二摄像头摄取影像;
信息获取模块,用于利用无线装置获取信息和/或指令和/或请求;
信息分析模块,用于分析指定的信息和/或指令;
种植控制模块,用于控制与无线装置连接的种植机器人、抓取机械臂以及切割机械臂执行设定的操作;
第三影像模块,用于控制与无线装置连接的第三摄像头摄取影像;
运输控制模块,用于控制与无线装置连接的运输电机执行设定的操作;
切割控制模块,用于控制与无线装置连接的切割电机执行设定的操作;
养殖控制模块,用于控制与无线装置连接的养殖机器人、运输机械臂、喂养机械臂以及存储门体执行设定的操作;
第四影像模块,用于控制与无线装置连接的第四摄像头摄取影像;
温度获取模块,用于控制与无线装置连接的温度传感器获取温度信息;
空调控制模块,用于控制与无线装置连接的空调设备执行设定的操作;
湿度获取模块,用于控制与无线装置连接的湿度传感器获取湿度信息;
湿度控制模块,用于控制与无线装置连接的加湿设备以及抽湿设备执行设定的操作;
信息提取模块,用于提取指定信息和/或指令和/或请求包含的信息和/或指令和/或请求;
隔离控制模块,用于控制与无线装置连接的隔离伸缩电机执行设定的操作;
第五影像模块,用于控制与无线装置连接的第五摄像头摄取影像;
施肥控制模块,用于控制与无线装置连接的种植无人机以及施肥喷头执行设定的操作。
说明书
技术领域
本发明涉及种植以及养殖领域,特别涉及一种基于竹鼠养殖的智能农业种植方法及其系统。
背景技术
竹鼠属于脊椎动物亚门、哺乳纲、啮齿目、竹鼠科,是一种体形较大的啮齿类动物,其肉质细腻精瘦,属于低脂高蛋白肉类,富含钙、磷、维生素E、维生素B及多种氨基酸,尤其赖氨酸含量丰富。据《本草纲目》记载:“竹鼠肉甘,平,无毒,补中益气,解毒”。现代医学证明,竹鼠肉具有促进人体白血球和毛发生长,增强肝功能和防止血管硬化等功效,对抗衰老、延缓青春期有良好效果,是天然美容和强身佳品,因此,竹鼠颇受国内外青睐。
如今,随着人类生活水平的提高,竹鼠经深加工,作为宫廷佳肴的食品正日益受到民众青睐,同时作为一种保健美容的高级新潮食品迅速兴起,野生竹鼠的数量已远远不能满足市场需要,国内人工饲养竹鼠的热潮正在兴起。
然,如何将竹类种植、竹鼠养殖与无人机以及机器人相结合,在到达竹鼠喂养时间后,控制种植机器人智能化前往种植区域进行切割竹子并将切割完成的竹子运输且切片,然后控制养殖机器人将竹片投放至竹鼠养殖槽进行位置,同时实时控制养殖棚内部的温度、湿度并对竹鼠进行安全防护、对怀孕母鼠进行护理以及对离乳幼鼠进行对应喂养以节省人力资源占用是目前急需解决的问题。
发明内容
发明目的:为了克服背景技术中的缺点,本发明实施例提供了一种基于竹鼠养殖的智能农业种植方法及其系统,能够有效解决上述背景技术中涉及的问题。
技术方案:
一种基于竹鼠养殖的智能农业种植方法,所述方法包括以下步骤:
S1、无线装置接收到养殖管理部门的外部设备发送的启动指令则将其返回给控制中心,所述控制中心接收到则控制设置于种植区域的第一摄像头实时摄取第一影像并控制设置于养殖棚的第二摄像头实时摄取第二影像;
S2、所述控制中心利用无线装置联网实时获取实时时间信息并根据获取的实时信息分析是否有到达养殖管理部门设定的竹鼠喂养时间;
S3、若有则所述控制中心控制设置于存储仓库内部位置的种植机器人启动并控制启动的种植机器人侧方的第三摄像头实时摄取第三影像;
S4、所述控制中心控制启动的种植机器人根据第三摄像头摄取的第三影像前往种植区域位置并控制设置于分别与种植区域以及养殖棚连接的运输通道内部位置的运输电机驱动连接的运输履带运行;
S5、所述控制中心控制设置于到达种植区域的种植机器人侧方位置的抓取机械臂根据第三摄像头摄取的第三影像抓取种植区域种植的处于可喂养竹鼠状态的竹子并控制设置于到达种植区域的种植机器人侧方位置的切割机械臂根据第三摄像头摄取的第三影像将抓取机械臂抓取的竹子进行切割;
S6、所述控制中心控制到达种植区域的种植机器人根据第三摄像头摄取的第三影像移动至与种植区域连接的运输通道侧方位置并控制设置于到达运输通道侧方的种植机器人侧方的切割机械臂将抓取机械臂抓取的竹子进行切割分段至运输履带表面;
S7、所述控制中心控制设置于运输通道与养殖棚连接处的切割分离通道内部位置的切割电机驱动切割刀片运行以及控制设置于存储仓库内部位置的养殖机器人启动并控制设置于启动的养殖机器人侧方位置的第四摄像头实时摄取第四影像;
S8、所述控制中心控制启动的养殖机器人根据第四摄像头摄取的第四影像前往切割分离通道侧方位置并根据第四影像分析存储于设置于切割分离通道侧方的存储放置坑位置的存储框是否有处于满载状态;
S9、若有则所述控制中心控制设置于到达切割分离通道侧方的养殖机器人侧方的运输机械臂根据第四摄像头摄取的第四影像与处于满载状态的存储框固定连接并控制到达切割分离通道侧方的养殖机器人根据第四摄像头摄取的第四影像前往养殖棚的养殖槽,且控制设置于到达养殖槽的养殖机器人侧方位置的喂养机械臂根据第四摄像头摄取的第四影像抓取运输机械臂固定连接的存储框内存储的切割分离完成的竹片投放至养殖槽的安全位置。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S10、所述控制中心控制设置于养殖棚内部的温度传感器实时获取温度信息并根据温度传感器实时获取的温度信息分析养殖棚当前温度是否有超过预设温度;
S11、若有则所述控制中心控制设置于养殖棚内部位置的空调设备启动实时为养殖棚进行降温并将温度恒温至预设温度区间。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S12、所述控制中心控制设置于养殖棚内部的湿度传感器实时获取湿度信息并根据湿度传感器实时获取的湿度信息分析养殖棚当前湿度是否有超过第一预设湿度;
S13、若有则所述控制中心控制设置于养殖棚内部位置的抽湿设备启动实时为养殖棚进行抽湿至预设湿度区间。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S14、所述控制中心控制设置于养殖棚内部的湿度传感器实时获取湿度信息并根据湿度传感器实时获取的湿度信息分析养殖棚当前湿度是否有低于第二预设湿度;
S15、若有则所述控制中心控制设置于养殖棚内部位置的加湿设备启动实时为养殖棚进行加湿至预设湿度区间。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S16、所述控制中心根据第二摄像头实时摄取的第二影像实时分析养殖棚的养殖槽内部的竹鼠是否有发生伤害行为;
S17、若有则所述控制中心提取第二影像中发生伤害行为的竹鼠所在的养殖槽编号以及控制设置于存储仓库内部位置的养殖机器人启动并控制设置于启动的养殖机器人侧方位置的第四摄像头实时摄取第四影像;
S18、所述控制中心控制启动的养殖机器人根据第四摄像头摄取的第四影像以及提取的养殖槽编号前往与提取的养殖槽编号一致的养殖槽位置并控制设置于到达与提取的养殖槽编号一致的养殖槽的养殖机器人侧方位置的喂养机械臂根据第四摄像头摄取的第四影像抓取与提取的养殖槽编号一致的养殖槽内部的竹鼠尾部将竹鼠提起;
S19、所述控制中心控制设置于与提取的养殖槽编号一致的养殖槽内部中间的隔离通道内部位置的隔离伸缩电机驱动连接的隔离伸缩板完全伸出形成隔离间并控制设置于到达与提取的养殖槽编号一致的养殖槽的养殖机器人侧方位置的喂养机机械臂根据第四摄像头摄取的第四影像将抓取的竹鼠分别单放置于隔离间内。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S20、所述控制中心根据第二摄像头实时摄取的第二影像实时分析是否有养殖棚的养殖槽内部的竹鼠处于怀孕状态;
S21、若有则所述控制中心提取第二影像中处于怀孕状态的竹鼠所在的养殖槽编号以及控制设置于存储仓库内部位置的养殖机器人启动并控制设置于启动的养殖机器人侧方位置的第四摄像头实时摄取第四影像;
S22、所述控制中心控制启动的养殖机器人根据第四摄像头摄取的第四影像以及提取的养殖槽编号前往与提取的养殖槽编号一致的养殖槽位置并控制设置于到达与提取的养殖槽编号一致的养殖槽的养殖机器人侧方位置的喂养机械臂根据第四摄像头摄取的第四影像抓取与提取的养殖槽编号一致的养殖槽内部的处于怀孕状态的竹鼠尾部将竹鼠提起;
S23、所述控制中心控制将处于怀孕状态的竹鼠提起的喂养机械臂所在的养殖机器人根据第四摄像头摄取的第四影像前往养殖区域的护理间位置并控制设置于到达护理间位置的养殖机器人侧方位置的抓取有处于怀孕状态的竹鼠的喂养机械臂根据第四摄像头摄取的第四影像将抓取的竹鼠缓慢放置于护理间内部。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S24、所述控制中心利用无线装置联网实时获取实时时间信息并根据获取的实时信息分析是否有到达养殖管理部门设定的竹子防护时间;
S25、若有则所述控制中心控制设置于存储仓库内部位置的种植无人机启动并控制启动的种植无人机侧方的第五摄像头实时摄取第五影像;
S26、所述控制中心控制启动的种植无人机根据第五摄像头摄取的第五影像前往种植区域位置进行巡逻并控制设置于在种植区域进行巡逻的种植无人机下方的施肥喷头通过连接的施肥导管将种植无人机内部的施肥存储仓存储的肥料喷洒至下方的种植区域。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S27、所述控制中心利用无线装置联网实时获取实时时间信息并根据获取的实时信息分析是否有到达养殖管理部门设定的离乳竹鼠喂养时间;
S28、若有则所述控制中心控制设置于存储仓库内部位置的养殖机器人启动并控制设置于启动的养殖机器人侧方位置的第四摄像头实时摄取第四影像;
S29、所述控制中心控制启动的养殖机器人根据第四摄像头摄取的第四影像前往离乳竹鼠养殖槽位置并控制设置于到达离乳竹鼠养殖槽的养殖机器人侧方的存储门体完全收缩开启离乳竹鼠存储仓;
S30、所述控制中心控制设置于到达离乳竹鼠养殖槽的养殖机器人侧方的喂养机械臂抓取开启的离乳竹鼠存储仓存储的离乳竹鼠饲料并控制设置于到达离乳竹鼠养殖槽的养殖机器人侧方的喂养机械臂根据第四摄像头摄取的第四影像将抓取的离乳竹鼠饲料投放于离乳竹鼠养殖槽内部。
作为本发明的一种优选方式,在S9中,所述方法还包括以下步骤:
S90、所述控制中心控制到达养殖槽的养殖机器人根据第四摄像头摄取的第四影像在养殖棚内部进行喂养移动并控制设置于在养殖棚进行喂养移动的养殖机器人侧方位置的喂养机械臂根据第四摄像头摄取的第四影像抓取与养殖槽内部养殖的竹鼠数量一致的运输机械臂固定连接的存储框内存储的切割分离完成的竹片数量;
S91、所述控制中心控制设置于在养殖棚进行喂养移动的养殖机器人侧方位置的喂养机械臂根据第四摄像头摄取的第四影像将抓取的竹片投放至养殖槽内部的安全位置。
一种基于竹鼠养殖的智能农业种植系统,包括存储仓库、种植区域、养殖棚、运输装置、防护装置、施肥装置、识别装置以及控制中心;
所述存储仓库设置有种植机器人、养殖机器人、种植无人机、抓取机械臂、切割机械臂、运输机械臂以及喂养机械臂,所述种植机器人设置有若干个并存储于存储仓库内部位置,用于执行种植操作;所述养殖机器人设置有若干个并存储于存储仓库内部位置,用于执行养殖操作;所述种植无人机设置有若干个并存储与存储仓库内部位置,用于执行种植物施肥操作;所述抓取机械臂为前端设置有抓取机构的伸缩机械臂,所述抓取机械臂设置有若干个并设置于种植机器人侧方位置,用于抓取物体;所述切割机械臂为前端设置有切割设备的伸缩机械臂,所述切割机械臂设置有若干个并设置于种植机器人侧方位置,用于进行切割物体;所述运输机械臂为前端设置有固定机构的伸缩机械臂,所述运输机械臂设置有若干个并设置于养殖机器人侧方位置,用于与存储框固定连接;所述喂养机械臂为前端设置有喂养机构的伸缩机械臂,所述喂养机械臂设置有若干个并设置于养殖机器人侧方位置,用于抓取竹片或离乳竹鼠饲料;
所述种植区域设置于存储仓库侧方位置,用于种植喂养竹鼠的种植物;
所述养殖棚设置有养殖槽、离乳竹鼠养殖槽、护理间、空调设备、抽湿设备以及加湿设备,所述养殖槽设置有若干个并设置于养殖棚内部位置,用于养殖竹鼠;所述离乳竹鼠养殖槽设置有若干个并设置于养殖棚内部位置,用于养殖离乳竹鼠;所述护理间设置有若干个并设置于养殖棚内部位置,用于养殖怀孕竹鼠;所述空调设备设置有若干个并设置于养殖棚内部位置,用于调节养殖棚内部温度;所述抽湿设备设置有若干个并设置于养殖棚内部位置,用于为养殖棚抽湿;所述加湿设备设置有若干个并设置于养殖棚内部位置,用于为养殖棚加湿;
所述运输装置包括运输通道、运输电机、运输履带、切割分离通道、切割电机、切割刀片、存储放置坑以及存储框,所述运输通道分别与种植区域以及养殖棚连接并采用防水设计,用于提供运输履带运行;所述运输电机设置于运输通道内部位置并分别与运输通道以及运输履带连接,用于驱动连接的运输履带运行;所述运输履带设置于运输通道内部位置并与运输电机连接,用于运输切割机械臂切割分段的种植物;所述切割分离通道设置于运输通道与养殖棚连接位置,用于提供切割刀片运行;所述切割电机设置于切割分离通道内部位置并分别与切割分离通道以及切割刀片连接,用于驱动连接的切割刀片运行;所述切割刀片设置有若干个并设置于切割分离通道内部位置,且分别与切割分离通道以及切割电机连接,用于切割运输履带运输的种植物;所述存储放置坑设置于切割分离通道侧方位置,用于放置存储框;所述存储框放置于存储放置坑位置,用于存储切割刀片切割分离完成的种植物;
所述防护装置包括隔离通道、隔离伸缩电机、隔离伸缩板、离乳竹鼠存储仓以及存储门体,所述隔离通道设置有若干个并设置于养殖槽底端内部位置,用于提供隔离伸缩板伸缩;所述隔离伸缩电机数量与隔离通道数量一致并设置于隔离通道内部位置,且分别与隔离通道以及隔离伸缩板连接,用于驱动连接的隔离伸缩板伸缩;所述隔离伸缩板数量与隔离伸缩电机数量一致并设置于隔离通道内部位置,且与隔离伸缩电机连接,伸出后,用于隔离养殖槽形成隔离空间;所述离乳竹鼠存储仓数量与养殖机器人数量一致并设置于养殖机器人内部位置,用于存储离乳竹鼠饲料;所述存储门体数量与离乳竹鼠存储仓数量一致并设置于养殖机器人侧方位置,且分别与养殖机器人以及离乳竹鼠存储仓连接,用于开关连接的离乳竹鼠存储仓;
所述施肥装置包括施肥存储仓、施肥喷头以及施肥导管,所述施肥存储仓数量与种植无人机数量一致并设置于种植无人机内部位置,用于存储肥料;所述施肥喷头设置有若干个并设置于种植无人机下方位置,用于喷洒肥料;所述施肥导管数量与施肥喷头数量一致并分别与施肥喷头以及施肥存储仓连接,用于将连接的施肥存储仓存储的肥料导入连接的施肥喷头内部;
所述识别装置包括第一摄像头、第二摄像头、第三摄像头、第四摄像头、第五摄像头、温度传感器以及湿度传感器,所述第一摄像头设置有若干个并设置于种植区域,用于摄取种植区域的环境运输;所述第二摄像头设置有若干个并设置于养殖棚,用于摄取养殖棚内部的环境影像;所述第三摄像头设置有若干个并设置于种植机器人侧方位置,且与种植机器人连接,用于摄取连接的种植机器人周围的环境影像;所述第四摄像头设置有若干个并设置于养殖机器人侧方位置,且与养殖机器人连接,用于摄取连接的养殖机器人周围的环境影像;所述第五摄像头设置有若干个并设置于种植无人机侧方位置,且与种植无人机连接,用于摄取连接的种植无人机周围的环境影像;所述温度传感器设置有若干个并设置于养殖棚内部位置,用于获取养殖棚内部环境温度;所述湿度传感器设置有若干个并设置于养殖棚内部位置,用于获取养殖棚内部环境湿度;
所述控制中心设置于种植管理部门规划的放置控制中心位置,用于智能化执行竹鼠养殖以及竹子种植操作,所述控制中心包括:
无线装置,用于分别与种植机器人、养殖机器人、种植无人机、抓取机械臂、切割机械臂、运输机械臂、喂养机械臂、空调设备、抽湿设备、加湿设备、运输电机、切割电机、隔离伸缩电机、存储门体、施肥喷头、第一摄像头、第二摄像头、第三摄像头、第四摄像头、第五摄像头、温度传感器、湿度传感器、种植管理部门的外部设备、急救中心、消防中心、报警中心以及网络连接;
信息接收模块,用于接收信息和/或指令和/或请求;
第一影像模块,用于控制与无线装置连接的第一摄像头摄取影像;
第二影像模块,用于控制与无线装置连接的第二摄像头摄取影像;
信息获取模块,用于利用无线装置获取信息和/或指令和/或请求;
信息分析模块,用于分析指定的信息和/或指令;
种植控制模块,用于控制与无线装置连接的种植机器人、抓取机械臂以及切割机械臂执行设定的操作;
第三影像模块,用于控制与无线装置连接的第三摄像头摄取影像;
运输控制模块,用于控制与无线装置连接的运输电机执行设定的操作;
切割控制模块,用于控制与无线装置连接的切割电机执行设定的操作;
养殖控制模块,用于控制与无线装置连接的养殖机器人、运输机械臂、喂养机械臂以及存储门体执行设定的操作;
第四影像模块,用于控制与无线装置连接的第四摄像头摄取影像;
温度获取模块,用于控制与无线装置连接的温度传感器获取温度信息;
空调控制模块,用于控制与无线装置连接的空调设备执行设定的操作;
湿度获取模块,用于控制与无线装置连接的湿度传感器获取湿度信息;
湿度控制模块,用于控制与无线装置连接的加湿设备以及抽湿设备执行设定的操作;
信息提取模块,用于提取指定信息和/或指令和/或请求包含的信息和/或指令和/或请求;
隔离控制模块,用于控制与无线装置连接的隔离伸缩电机执行设定的操作;
第五影像模块,用于控制与无线装置连接的第五摄像头摄取影像;
施肥控制模块,用于控制与无线装置连接的种植无人机以及施肥喷头执行设定的操作。
本发明实现以下有益效果:
1.智能农业种植系统启动后,若检测到到达竹鼠喂养时间则控制种植机器人前往种植区域进行切割竹子并控制运输履带运行,然后将竹子切割分段放置于运输履带,由运输履带运输至切割刀片位置进行切割变成竹片,然后养殖机器人将装有竹片的存储框固定连接移动至养殖槽位置并控制养殖机器人投放竹片至养殖槽进行喂养竹鼠。
2.智能农业种植系统启动后,实时控制养殖棚内部的温度位于竹鼠舒适温度区间并实时控制养殖棚内部的适度位于竹鼠舒适湿度区间。
3.智能农业种植系统启动后,实时防护养殖槽内部的竹鼠,实时护理养殖槽内部怀孕的竹鼠,实时护理离乳竹鼠。
4.智能农业种植系统启动后,若检测到到达竹子防护时间则控制种植无人机在种植区域上方进行飞行巡逻并控制施肥喷头实时喷洒肥料至下方种植区域。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并于说明书一起用于解释本公开的原理。
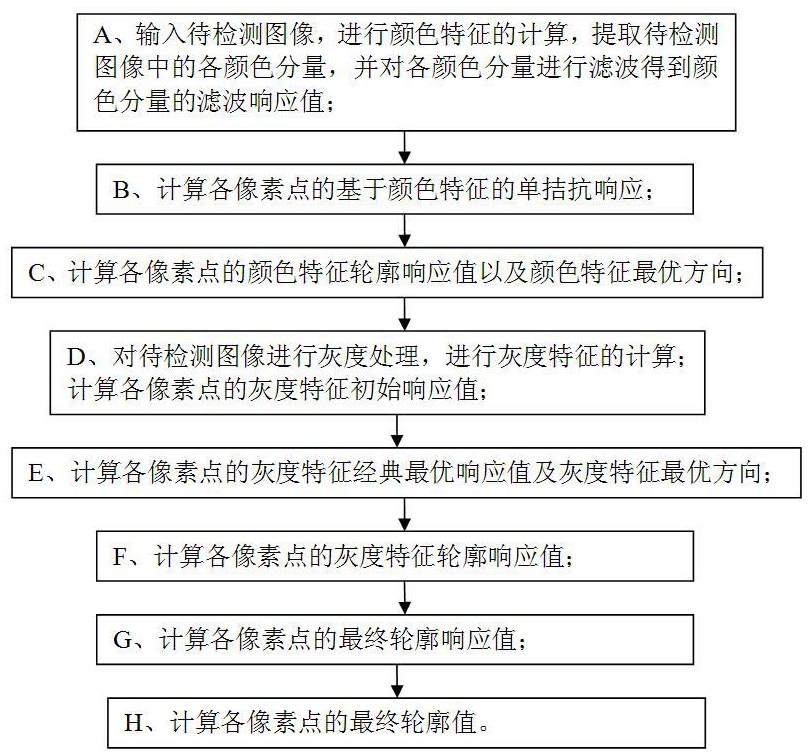
图1为本发明其中一个示例提供的智能农业种植方法的流程图;
图2为本发明其中一个示例提供的养殖棚温度控制方法的流程图;
图3为本发明其中一个示例提供的养殖棚抽湿方法的流程图;
图4为本发明其中一个示例提供的养殖棚加湿方法的流程图;
图5为本发明其中一个示例提供的竹鼠伤害行为防护方法的流程图;
图6为本发明其中一个示例提供的竹鼠怀孕护理方法的流程图;
图7为本发明其中一个示例提供的种植区域肥料喷洒方法的流程图;
图8为本发明其中一个示例提供的离乳竹鼠养殖方法的流程图;
图9为本发明其中一个示例提供的竹鼠喂养控制方法的流程图;
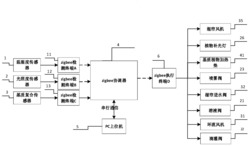
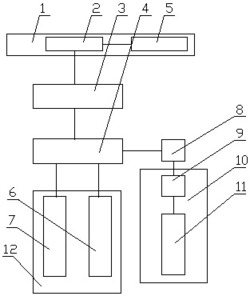
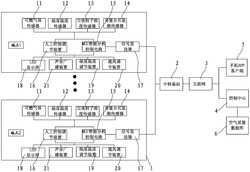
图10为本发明其中一个示例提供的智能农业种植系统的连接关系图;
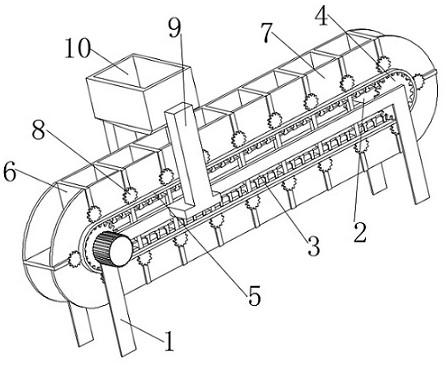
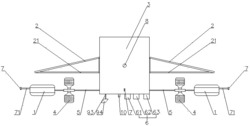
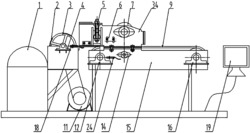
图11为本发明其中一个示例提供的种植区域、存储仓库、运输通道以及养殖棚的俯视示意图;
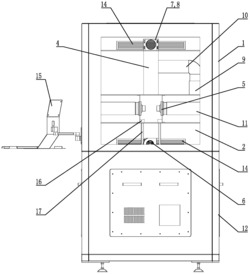
图12为本发明其中一个示例提供的养殖棚的内部俯视示意图;
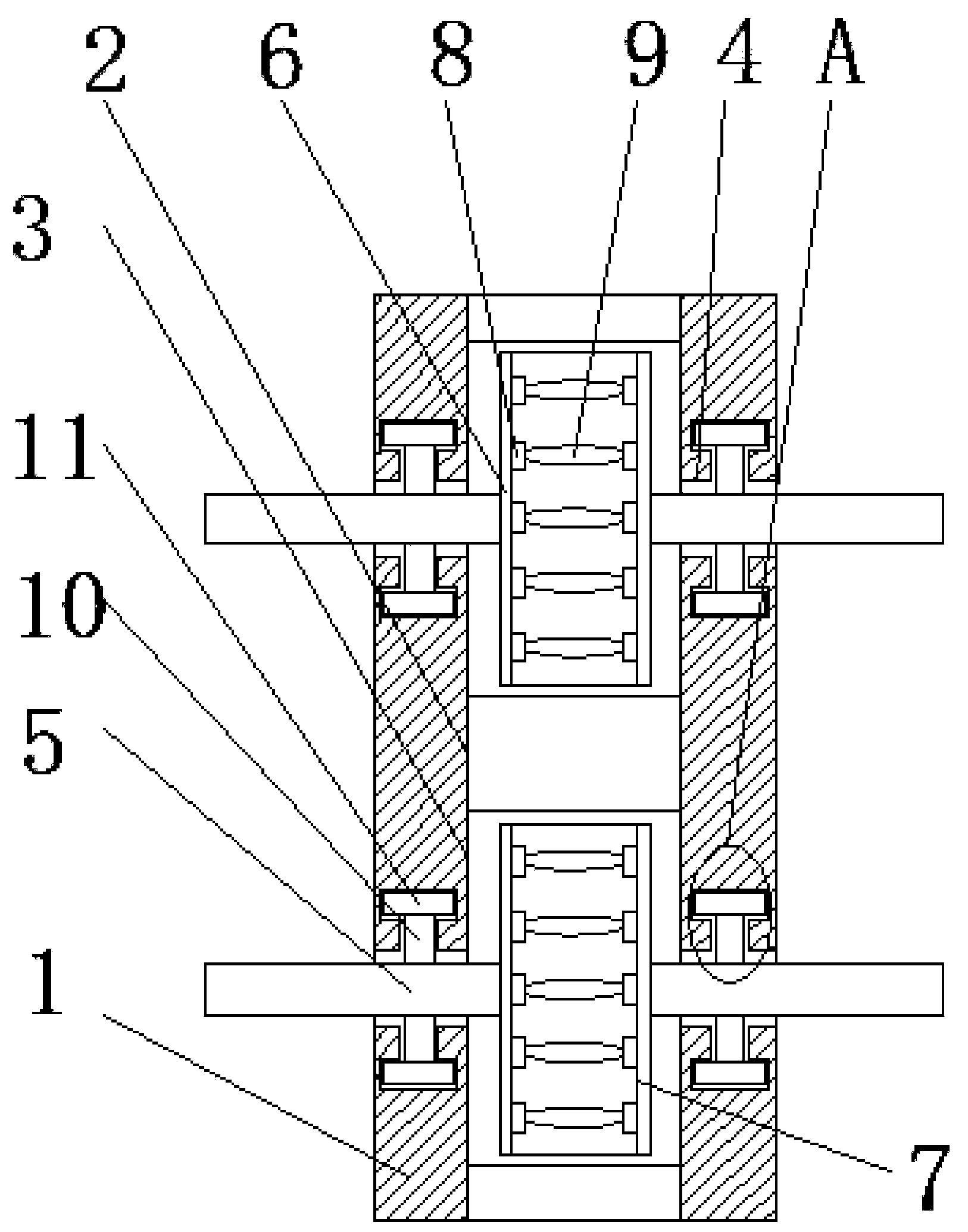
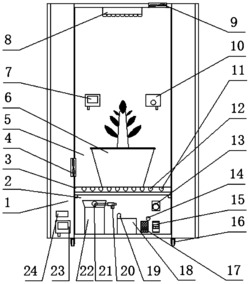
图13为本发明其中一个示例提供的养殖槽的隔离通道所在区域的局部侧方剖视示意图;
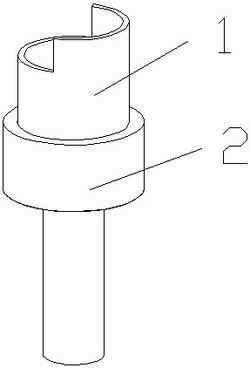
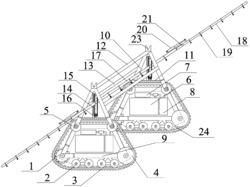
图14为本发明其中一个示例提供的种植机器人的正面示意图;
图15为本发明其中一个示例提供的养殖机器人的正面示意图;
图16为本发明其中一个示例提供的养殖机器人的左侧面示意图;
图17为本发明其中一个示例提供的运输通道的局部剖视示意图;
图18为本发明其中一个示例提供的运输通道与切割分离通道连接区域的局部剖视示意图;
图19为本发明其中一个示例提供的存储框的正面剖视示意图;
图20为本发明其中一个示例提供的种植无人机的正面剖视示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
实施例一
参考图1,图9-12,图14-19所示。
具体的,本实施例提供一种基于竹鼠养殖的智能农业种植方法,所述方法包括以下步骤:
S1、无线装置80接收到养殖管理部门的外部设备发送的启动指令则将其返回给控制中心8,所述控制中心8内部的信息接收模块81接收到启动指令后,控制中心8内部的第一影像模块82控制设置于种植区域2的第一摄像头70实时摄取第一影像,同时控制中心8内部的第二影像模块83控制设置于养殖棚3的第二摄像头71实时摄取第二影像;
S2、在信息接收模块81接收到启动指令后,控制中心8内部的信息获取模块84联网实时获取实时时间信息,在信息获取模块84获取到实时时间信息后,控制中心8内部的信息分析模块85根据获取的实时信息分析当前时间是否有到达养殖管理部门设定的竹鼠喂养时间;
S3、若信息分析模块85分析出当前时间有达到竹鼠喂养时间后,控制中心8内部的种植控制模块86控制设置于存储仓库1内部位置的种植机器人10启动,在种植机器人10启动后,控制中心8内部的第三影像模块87控制启动的种植机器人10侧方的第三摄像头72实时摄取第三影像;
S4、在种植机器人10启动完成后,种植控制模块86控制启动的种植机器人10根据第三摄像头72摄取的第三影像前往种植区域2位置,同时控制中心8内部的运输控制模块88控制设置于分别与种植区域2以及养殖棚3连接的运输通道40内部位置的运输电机41驱动连接的运输履带42运行;
S5、在种植机器人10到达种植区域2后,种植控制模块86控制设置于到达种植区域2的种植机器人10侧方位置的抓取机械臂13根据第三摄像头72摄取的第三影像抓取种植区域2种植的处于可喂养竹鼠状态的竹子(抓取数量为1,且抓取是指抓取机械臂13利用前端的抓取机构将竹子固定),在抓取机械臂13抓取完成竹子后,种植控制模块86控制设置于到达种植区域2的种植机器人10侧方位置的切割机械臂14根据第三摄像头72摄取的第三影像将抓取机械臂13抓取的竹子进行切割,切割机械臂14切割竹子完成后,抓取机械臂13将切割完成的竹子旋转90°;
S6、在切割机械臂14将竹子切割完成后,种植控制模块86控制到达种植区域2的种植机器人10根据第三摄像头72摄取的第三影像移动至与种植区域2连接的运输通道40侧方位置,且抓取机械臂13将竹子与运输通道40的运输履带42中心位置保持同一水平线,在种植机器人10到达运输通道40侧方位置后,种植控制模块86控制设置于到达运输通道40侧方的种植机器人10侧方的切割机械臂14将抓取机械臂13抓取的竹子进行切割分段至运输履带42表面;
S7、在种植机器人10到达运输通道40侧方位置后,控制中心8内部的切割控制模块89控制设置于运输通道40与养殖棚3连接处的切割分离通道43内部位置的切割电机44驱动切割刀片45运行,同时控制中心8内部的养殖控制模块90控制设置于存储仓库1内部位置的养殖机器人11启动,在养殖机器人11启动完成后,控制中心8内部的第四影像模块91控制设置于启动的养殖机器人11侧方位置的第四摄像头73实时摄取第四影像;
S8、在养殖机器人11启动完成后,养殖控制模块90控制启动的养殖机器人11根据第四摄像头73摄取的第四影像前往切割分离通道43的侧方位置,在养殖机器人11到达切割分离通道43侧方位置后,信息分析模块85根据第四影像分析存储于设置于切割分离通道43侧方的存储放置坑46位置的存储框47是否有处于满载状态;
S9、若信息分析模块85分析出存储框47处于满载状态后,养殖控制模块90控制设置于到达切割分离通道43侧方的养殖机器人11侧方的运输机械臂15根据第四摄像头73摄取的第四影像与处于满载状态的存储框47固定连接,在养殖机器人11的运输机械臂15与存储框47固定连接完成后,养殖控制模块90控制到达切割分离通道43侧方且与存储框47固定连接完成的运输机械臂15所在的养殖机器人11根据第四摄像头73摄取的第四影像前往养殖棚3的养殖槽30,再养殖机器人11到达养殖槽30后,养殖控制模块90控制设置于到达养殖槽30的养殖机器人11侧方位置的喂养机械臂16根据第四摄像头73摄取的第四影像抓取运输机械臂15固定连接的存储框47内存储的切割分离完成的竹片投放至养殖槽30的安全位置。
作为本发明的一种优选方式,在S9中,所述方法还包括以下步骤:
S90、养殖控制模块90控制到达养殖槽30的养殖机器人11根据第四摄像头73摄取的第四影像在养殖棚3内部进行喂养移动(所述喂养移动是指养殖机器人11围绕养殖槽30进行匀速移动,且每个养殖槽30停置5秒),同时养殖控制模块90控制设置于在养殖棚3进行喂养移动的养殖机器人11侧方位置的喂养机械臂16根据第四摄像头73摄取的第四影像抓取与养殖槽30内部养殖的竹鼠数量一致的运输机械臂15固定连接的存储框47内存储的切割分离完成的竹片数量;
S91、在养殖机器人11停置于养殖槽30侧方位置后,养殖控制模块90控制设置于在养殖棚3进行喂养移动的养殖机器人11侧方位置的喂养机械臂16根据第四摄像头73摄取的第四影像将抓取的竹片投放至养殖槽30内部的安全位置。
其中,所述切割机械臂14将抓取机械臂13抓取的竹子进行切割是指切割机械臂14利用前端内的切割设备将抓取机械臂13抓取的竹子与地面相距50厘米位置处进行切割分离;本申请的竹子均为合法种植的竹类;所述切割机械臂14将抓取机械臂13抓取的竹子进行切割分段是指切割机械臂14利用前端内的切割设备将抓取机械臂13抓取的竹子切割成相等的竹段;切割电机44驱动切割刀片45运行将运输履带42上的竹段切割分离成竹片,以供竹鼠食用;第一影像是指第一摄像头70摄取的种植区域2环境影像;所述第二影像是指第二摄像头71摄取的养殖棚3内部环境影像;所述第三影像是指第三摄像头72摄取的连接的种植机器人10周围的环境影像,且第三影像与第三摄像头72所在的种植机器人10及其内部的电子器件绑定;所述第四影像是指第四摄像头73摄取的连接的养殖机器人11周围的环境影像,且第四影像与第四摄像头73所在的养殖机器人11及其内部的电子器件绑定;所述存储框47处于满载状态是指竹片的高度达到存储框47总高度的十分之九位置;所述安全位置是指该位置未存在有竹鼠的位置,放置投放竹片伤害到竹鼠;本申请养殖的竹鼠均为允许养殖的竹鼠种类。
实施例二
参考图2-4,图10-12所示。
具体的,本实施例与实施例一基本上一致,区别之处在于,在S1后,所述方法还包括以下步骤:
S10、控制中心8内部的温度获取模块92控制设置于养殖棚3内部的温度传感器75实时获取温度信息,在温度获取模块92控制温度传感器75获取到温度信息后,信息分析模块85根据温度传感器75实时获取的温度信息分析养殖棚3当前温度是否有超过预设温度;
S11、若信息分析模块85分析出温度传感器75获取的温度信息有超过预设温度后,控制中心8内部的空调控制模块93控制设置于养殖棚3内部位置的空调设备33启动实时为养殖棚3进行降温并将温度恒温至预设温度区间。
其中,所述预设温度为26-34℃,在本实施例中优选为30℃;所述预设温度区间为20℃-25℃。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S12、控制中心8内部的湿度获取模块94控制设置于养殖棚3内部的湿度传感器76实时获取湿度信息,在湿度获取模块94控制湿度传感器76获取到湿度信息后,信息分析模块85根据湿度传感器76实时获取的湿度信息分析养殖棚3当前湿度是否有超过第一预设湿度;
S13、若信息分析模块85分析出养殖棚3当前湿度有超过第一预设湿度后,控制中心8内部的湿度控制模块95控制设置于养殖棚3内部位置的抽湿设备34启动实时为养殖棚3进行抽湿至预设湿度区间。
其中,所述第一预设湿度为61-80%,在本实施例中优选为65%;所述预设湿度区间为50%-60%。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S14、控制中心8内部的湿度获取模块94控制设置于养殖棚3内部的湿度传感器76实时获取湿度信息,在湿度获取模块94控制湿度传感器76获取到湿度信息后,信息分析模块85根据湿度传感器76实时获取的湿度信息分析养殖棚3当前湿度是否有低于第二预设湿度;
S15、若信息分析模块85分析出养殖棚3当前湿度有低于第二预设湿度后,湿度控制模块95控制设置于养殖棚3内部位置的加湿设备35启动实时为养殖棚3进行加湿至预设湿度区间。
其中,所述第二预设湿度为10%-49%,在本实施例中优选为40%。
实施例三
参考图5-7,图10-13,图15-16所示。
具体的,本实施例与实施例一基本上一致,区别之处在于,本实施例中,在S1后,所述方法还包括以下步骤:
S16、信息分析模块85根据第二摄像头71实时摄取的第二影像实时分析养殖棚3的养殖槽30内部的竹鼠是否有发生伤害行为;
S17、若信息分析分析模块分析出有养殖槽30内部的竹鼠发生伤害行为后,控制中心8内部的信息提取模块96提取第二影像中发生伤害行为的竹鼠所在的养殖槽30编号,同时养殖控制模块90控制设置于存储仓库1内部位置的养殖机器人11启动,在养殖机器人11启动后,第四影像模块91控制设置于启动的养殖机器人11侧方位置的第四摄像头73实时摄取第四影像;
S18、养殖控制模块90控制启动的养殖机器人11根据第四摄像头73摄取的第四影像以及提取的养殖槽30编号前往与提取的养殖槽30编号一致的养殖槽30位置,在养殖机器人11到达与提取的养殖槽30编号一致的养殖槽30位置后,养殖控制模块90控制设置于到达与提取的养殖槽30编号一致的养殖槽30的养殖机器人11侧方位置的喂养机械臂16根据第四摄像头73摄取的第四影像抓取与提取的养殖槽30编号一致的养殖槽30内部的竹鼠尾部将竹鼠提起;
S19、在喂养机械臂16抓取竹鼠尾部将竹鼠提起后,控制中心8内部的隔离控制模块97控制设置于与提取的养殖槽30编号一致的养殖槽30内部中间的隔离通道50内部位置的隔离伸缩电机51驱动连接的隔离伸缩板52完全伸出形成隔离间,在隔离伸缩板52完全伸出形成隔离间后,养殖控制模块90控制设置于到达与提取的养殖槽30编号一致的养殖槽30的养殖机器人11侧方位置的喂养机机械臂根据第四摄像头73摄取的第四影像将抓取的竹鼠分别单独放置于隔离间内。
其中,所述伤害行为是指竹鼠之间的打架、撕咬等造成伤害的行为;养殖槽30均设置有唯一的编号;养殖槽30内部均养殖有两只竹鼠。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S20、信息分析模块85根据第二摄像头71实时摄取的第二影像实时分析是否有养殖棚3的养殖槽30内部的竹鼠处于怀孕状态;
S21、若信息分析模块85分析出有养殖槽30内的竹鼠处于怀孕状态后,信息提取模块96提取第二影像中处于怀孕状态的竹鼠所在的养殖槽30编号,同时养殖控制模块90控制设置于存储仓库1内部位置的养殖机器人11启动,在养殖机器人11驱动后,第四影像模块91控制设置于启动的养殖机器人11侧方位置的第四摄像头73实时摄取第四影像;
S22、养殖控制模块90控制启动的养殖机器人11根据第四摄像头73摄取的第四影像以及提取的养殖槽30编号前往与提取的养殖槽30编号一致的养殖槽30位置,在养殖机器人11到达与提取的养殖槽30编号一致的养殖槽30位置后,养殖控制模块90控制设置于到达与提取的养殖槽30编号一致的养殖槽30的养殖机器人11侧方位置的喂养机械臂16根据第四摄像头73摄取的第四影像抓取与提取的养殖槽30编号一致的养殖槽30内部的处于怀孕状态的竹鼠尾部将竹鼠提起;
S23、在喂养机械臂16抓取竹鼠尾部将竹鼠提起后,养殖控制模块90控制将处于怀孕状态的竹鼠提起的喂养机械臂16所在的养殖机器人11根据第四摄像头73摄取的第四影像前往养殖区域的护理间32位置,在养殖机器人11到达护理间32位置后,养殖控制模块90控制设置于到达护理间32位置的养殖机器人11侧方位置的抓取有处于怀孕状态的竹鼠的喂养机械臂16根据第四摄像头73摄取的第四影像将抓取的竹鼠缓慢放置于护理间32内部。
作为本发明的一种优选方式,在S1后,所述方法还包括以下步骤:
S27、信息获取模块84利用无线装置80联网实时获取实时时间信息,在信息获取模块84获取到实时时间信息后,信息分析模块85根据信息获取模块84获取到的实时信息实时分析当前时间是否有到达养殖管理部门设定的离乳竹鼠喂养时间;
S28、若信息分析模块85分析出当前时间有到达养殖管理部门设定的离乳竹鼠喂养时间后,养殖控制模块90控制设置于存储仓库1内部位置的养殖机器人11启动,在养殖机器人11启动后,第四影像控制设置于启动的养殖机器人11侧方位置的第四摄像头73实时摄取第四影像;
S29、养殖控制模块90控制启动的养殖机器人11根据第四摄像头73摄取的第四影像前往离乳竹鼠养殖槽31位置,在养殖机器人11到达离乳竹鼠养殖槽31位置后,养殖控制模块90控制设置于到达离乳竹鼠养殖槽31的养殖机器人11侧方的存储门体54完全收缩开启离乳竹鼠存储仓53;
S30、养殖控制模块90控制设置于到达离乳竹鼠养殖槽31的养殖机器人11侧方的喂养机械臂16抓取开启的离乳竹鼠存储仓53存储的离乳竹鼠饲料,在喂养机械臂16抓取完成离乳竹鼠存储仓53存储的离乳竹鼠饲料后,养殖控制模块90控制设置于到达离乳竹鼠养殖槽31的养殖机器人11侧方的喂养机械臂16根据第四摄像头73摄取的第四影像将抓取的离乳竹鼠饲料投放于离乳竹鼠养殖槽31内部。
其中,所述离乳竹鼠是指离乳后3个月龄内的竹鼠。
实施例四
参考图8,图10-11,图20所示。
具体的,本实施例与实施例一基本上一致,区别之处在于,本实施例中,在S1后,所述方法还包括以下步骤:
S24、信息获取模块84利用无线装置80联网实时获取实时时间信息,在信息获取模块84获取到实时时间信息后,信息分析模块85根据信息获取模块84获取到的实时信息实时分析当前时间是否有到达养殖管理部门设定的竹子防护时间;
S25、若信息分析模块85分析出当前时间有到达养殖管理部门设定的竹子防护时间后,施肥控制模块99控制设置于存储仓库1内部位置的种植无人机12启动,在种植无人机12启动后,控制中心8内部的第五影像模块98控制启动的种植无人机12侧方的第五摄像头74实时摄取第五影像;
S26、施肥控制模块99控制启动的种植无人机12根据第五摄像头74摄取的第五影像前往种植区域2位置进行巡逻,在种植无人机12位于种植区域2上方进行巡逻时,施肥控制模块99控制设置于在种植区域2进行巡逻的种植无人机12下方的施肥喷头61通过连接的施肥导管62将种植无人机12内部的施肥存储仓60存储的肥料喷洒至下方的种植区域2。
其中,所述第五影像是指第五摄像头74摄取的连接的种植无人机12周围的环境影像,且第五影像与第五摄像头74所在的种植无人机12及其内部的电子器件绑定。
实施例五
参考图10-20所示。
具体的,本实施例提供一种基于竹鼠养殖的智能农业种植系统,包括存储仓库1、种植区域2、养殖棚3、运输装置4、防护装置5、施肥装置6、识别装置7以及控制中心8,
所述存储仓库1设置有种植机器人10、养殖机器人11、种植无人机12、抓取机械臂13、切割机械臂14、运输机械臂15以及喂养机械臂16,所述种植机器人10设置有若干个并存储于存储仓库1内部位置,用于执行种植操作;所述养殖机器人11设置有若干个并存储于存储仓库1内部位置,用于执行养殖操作;所述种植无人机12设置有若干个并存储与存储仓库1内部位置,用于执行种植物施肥操作;所述抓取机械臂13为前端设置有抓取机构的伸缩机械臂,所述抓取机械臂13设置有若干个并设置于种植机器人10侧方位置,用于抓取物体;所述切割机械臂14为前端设置有切割设备的伸缩机械臂,所述切割机械臂14设置有若干个并设置于种植机器人10侧方位置,用于进行切割物体;所述运输机械臂15为前端设置有固定机构的伸缩机械臂,所述运输机械臂15设置有若干个并设置于养殖机器人11侧方位置,用于与存储框47固定连接;所述喂养机械臂16为前端设置有喂养机构的伸缩机械臂,所述喂养机械臂16设置有若干个并设置于养殖机器人11侧方位置,用于抓取竹片或离乳竹鼠饲料;
所述种植区域2设置于存储仓库1侧方位置,用于种植喂养竹鼠的种植物;
所述养殖棚3设置有养殖槽30、离乳竹鼠养殖槽31、护理间32、空调设备33、抽湿设备34以及加湿设备35,所述养殖槽30设置有若干个并设置于养殖棚3内部位置,用于养殖竹鼠;所述离乳竹鼠养殖槽31设置有若干个并设置于养殖棚3内部位置,用于养殖离乳竹鼠;所述护理间设置有若干个并设置于养殖棚3内部位置,用于养殖怀孕竹鼠;所述空调设备33设置有若干个并设置于养殖棚3内部位置,用于调节养殖棚3内部温度;所述抽湿设备34设置有若干个并设置于养殖棚3内部位置,用于为养殖棚3抽湿;所述加湿设备35设置有若干个并设置于养殖棚3内部位置,用于为养殖棚3加湿;
所述运输装置4包括运输通道40、运输电机41、运输履带42、切割分离通道43、切割电机44、切割刀片45、存储放置坑46以及存储框47,所述运输通道40分别与种植区域2以及养殖棚3连接并采用防水设计,用于提供运输履带42运行;所述运输电机41设置于运输通道40内部位置并分别与运输通道40以及运输履带42连接,用于驱动连接的运输履带42运行;所述运输履带42设置于运输通道40内部位置并与运输电机41连接,用于运输切割机械臂14切割分段的种植物;所述切割分离通道43设置于运输通道40与养殖棚3连接位置,用于提供切割刀片45运行;所述切割电机44设置于切割分离通道43内部位置并分别与切割分离通道43以及切割刀片45连接,用于驱动连接的切割刀片45运行;所述切割刀片45设置有若干个并设置于切割分离通道43内部位置,且分别与切割分离通道43以及切割电机44连接,用于切割运输履带42运输的种植物;所述存储放置坑46设置于切割分离通道43侧方位置,用于放置存储框47;所述存储框47放置于存储放置坑46位置,用于存储切割刀片45切割分离完成的种植物;
所述防护装置5包括隔离通道50、隔离伸缩电机51、隔离伸缩板52、离乳竹鼠存储仓53以及存储门体54,所述隔离通道50设置有若干个并设置于养殖槽30底端内部位置,用于提供隔离伸缩板52伸缩;所述隔离伸缩电机51数量与隔离通道50数量一致并设置于隔离通道50内部位置,且分别与隔离通道50以及隔离伸缩板52连接,用于驱动连接的隔离伸缩板52伸缩;所述隔离伸缩板52数量与隔离伸缩电机51数量一致并设置于隔离通道50内部位置,且与隔离伸缩电机51连接,伸出后,用于隔离养殖槽30形成隔离空间;所述离乳竹鼠存储仓53数量与养殖机器人11数量一致并设置于养殖机器人11内部位置,用于存储离乳竹鼠饲料;所述存储门体54数量与离乳竹鼠存储仓53数量一致并设置于养殖机器人11侧方位置,且分别与养殖机器人11以及离乳竹鼠存储仓53连接,用于开关连接的离乳竹鼠存储仓53;
所述施肥装置6包括施肥存储仓60、施肥喷头61以及施肥导管62,所述施肥存储仓60数量与种植无人机12数量一致并设置于种植无人机12内部位置,用于存储肥料;所述施肥喷头61设置有若干个并设置于种植无人机12下方位置,用于喷洒肥料;所述施肥导管62数量与施肥喷头61数量一致并分别与施肥喷头61以及施肥存储仓60连接,用于将连接的施肥存储仓60存储的肥料导入连接的施肥喷头61内部;
所述识别装置7包括第一摄像头70、第二摄像头71、第三摄像头72、第四摄像头73、第五摄像头74、温度传感器75以及湿度传感器76,所述第一摄像头70设置有若干个并设置于种植区域2,用于摄取种植区域2的环境运输;所述第二摄像头71设置有若干个并设置于养殖棚3,用于摄取养殖棚3内部的环境影像;所述第三摄像头72设置有若干个并设置于种植机器人10侧方位置,且与种植机器人10连接,用于摄取连接的种植机器人10周围的环境影像;所述第四摄像头73设置有若干个并设置于养殖机器人11侧方位置,且与养殖机器人11连接,用于摄取连接的养殖机器人11周围的环境影像;所述第五摄像头74设置有若干个并设置于种植无人机12侧方位置,且与种植无人机12连接,用于摄取连接的种植无人机12周围的环境影像;所述温度传感器75设置有若干个并设置于养殖棚3内部位置,用于获取养殖棚3内部环境温度;所述湿度传感器76设置有若干个并设置于养殖棚3内部位置,用于获取养殖棚3内部环境湿度;
所述控制中心8设置于种植管理部门规划的放置控制中心8位置,用于智能化执行竹鼠养殖以及竹子种植操作,所述控制中心8包括:
无线装置80,用于分别与种植机器人10、养殖机器人11、种植无人机12、抓取机械臂13、切割机械臂14、运输机械臂15、喂养机械臂16、空调设备33、抽湿设备34、加湿设备35、运输电机41、切割电机44、隔离伸缩电机51、存储门体54、施肥喷头61、第一摄像头70、第二摄像头71、第三摄像头72、第四摄像头73、第五摄像头74、温度传感器75、湿度传感器76、种植管理部门的外部设备、急救中心、消防中心、报警中心以及网络连接;
信息接收模块81,用于接收信息和/或指令和/或请求;
第一影像模块82,用于控制与无线装置80连接的第一摄像头70摄取影像;
第二影像模块83,用于控制与无线装置80连接的第二摄像头71摄取影像;
信息获取模块84,用于利用无线装置80获取信息和/或指令和/或请求;
信息分析模块85,用于分析指定的信息和/或指令;
种植控制模块86,用于控制与无线装置80连接的种植机器人10、抓取机械臂13以及切割机械臂14执行设定的操作;
第三影像模块87,用于控制与无线装置80连接的第三摄像头72摄取影像;
运输控制模块88,用于控制与无线装置80连接的运输电机41执行设定的操作;
切割控制模块89,用于控制与无线装置80连接的切割电机44执行设定的操作;
养殖控制模块90,用于控制与无线装置80连接的养殖机器人11、运输机械臂15、喂养机械臂16以及存储门体54执行设定的操作;
第四影像模块91,用于控制与无线装置80连接的第四摄像头73摄取影像;
温度获取模块92,用于控制与无线装置80连接的温度传感器75获取温度信息;
空调控制模块93,用于控制与无线装置80连接的空调设备33执行设定的操作;
湿度获取模块94,用于控制与无线装置80连接的湿度传感器76获取湿度信息;
湿度控制模块95,用于控制与无线装置80连接的加湿设备35以及抽湿设备34执行设定的操作;
信息提取模块96,用于提取指定信息和/或指令和/或请求包含的信息和/或指令和/或请求;
隔离控制模块97,用于控制与无线装置80连接的隔离伸缩电机51执行设定的操作;
第五影像模块98,用于控制与无线装置80连接的第五摄像头74摄取影像;
施肥控制模块99,用于控制与无线装置80连接的种植无人机12以及施肥喷头61执行设定的操作。
其中,所述智能农业种植系统内部的电子器件均采用防水设计。
应理解,在实施例五中,上述各个模块的具体实现过程可与上述方法实施例(实施例一至实施例四)的描述相对应,此处不再详细描述。
上述实施例五所提供的系统,仅以上述各功能模块的划分进行举例说明,实际应用中,可以根据需要而将上诉功能分配由不同的功能模块完成,即将系统的内部结构划分成不同的功能模块,以完成以上描述的全部或者部分功能。
上述实施例只为说明本发明的技术构思及特点,其目的是让熟悉该技术领域的技术人员能够了解本发明的内容并据以实施,并不能以此来限制本发明的保护范围。凡根据本发明精神实质所作出的等同变换或修饰,都应涵盖在本发明的保护范围之内。
一种基于竹鼠养殖的智能农业种植方法及其系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0