








专利摘要
本发明公开了一种穿戴物试用机器人,包括处理器、至少一个压力传感器以及至少一个第一变形部,第一变形部包括可变形点阵壳体以及设置在可变形点阵壳体内部的伸缩机构和至少一个可移动顶出机构,可变形点阵壳体包括多个层叠间隔设置的环形轨道以及固定在环形轨道上且向环形轨道外侧延伸的多个可伸缩连杆组件,伸缩机构用于根据预设的人体三维数据控制穿戴物试用机器人沿第一方向的长度,可移动顶出机构用于根据预设的人体三维数据控制每一可伸缩连杆组件伸长至对应的预定的长度以使可变形点阵壳体变形至与预设的人体三维数据相符的形状,通过上述方式能够提高穿戴物试用的准确性。
权利要求
1.一种穿戴物试用机器人,其特征在于,所述穿戴物试用机器人包括处理器、至少一个压力传感器以及至少一个第一变形部,所述第一变形部包括可变形点阵壳体以及设置在所述可变形点阵壳体内部的伸缩机构和至少一个可移动顶出机构,所述可变形点阵壳体包括多个层叠间隔设置的环形轨道以及固定在所述环形轨道上且向所述环形轨道外侧延伸的多个可伸缩连杆组件,所述伸缩机构用于根据预设的人体三维数据控制所述穿戴物试用机器人沿第一方向的长度,所述可移动顶出机构用于根据预设的人体三维数据控制每一所述可伸缩连杆组件伸长至对应的预定的长度以使所述可变形点阵壳体变形至与所述预设的人体三维数据相符的形状,待试用的穿戴物在试用时穿在所述穿戴物试用机器人上,所述压力传感器用于在所述可变形点阵壳体变形至与预设的人体三维数据相符的形状时检测所述待试用穿戴物对压力传感器的压力,所述处理器用于根据所述压力传感器检测的压力生成舒适程度报告;其中,所述伸缩机构包括至少一个第一伸缩杆,相邻两环形轨道沿所述第一方向间隔设置,所述第一伸缩杆与所述环形轨道连接且在伸缩时控制相邻两环形轨道之间的间距变大或变小,所述第一伸缩杆的两端分别与所述可变形点阵壳体的两端固定且所述第一伸缩杆在伸缩时带动所述可变形点阵壳体沿所述第一方向的尺寸变大或变小。
2.根据权利要求1所述的穿戴物试用机器人,其特征在于,每一所述可伸缩连杆组件包括第一连杆组件、第二连杆组件以及传动件,第一连杆组件包括首尾铰接的多个第一连杆,第二连杆组件包括与第一连杆同等数量的且首尾铰接的多个第二连杆,每一第一连杆与对应位置的第二连杆交错铰接,所述可移动顶出机构在顶抵所述传动件时带动所述可伸缩连杆组件伸长。
3.根据权利要求2所述的穿戴物试用机器人,其特征在于,所述传动件为顶杆,所述顶杆第一端与所述可伸缩连杆组件固定;
或者,所述传动件为钳位夹,所述钳位夹包括第一夹部和与所述第一夹部弹性铰接的第二夹部,所述第一夹部包括分别位于所述第一夹部与所述第二夹部的铰接点两侧的第一咬合部和第一受力部,所述第二夹部包括分别位于所述铰接点两侧的第二咬合部和第二受力部,在所述可移动顶出机构未顶抵所述第一受力部和所述第二受力部时,所述第一咬合部和第二咬合部在弹性铰接的弹力作用下咬合在所述第一连接和所述第二连杆交错铰接的铰接轴上以使所述可伸缩连杆组件的长度稳定不变,在所述移动顶出机构顶抵所述第一受力部和所述第二受力部时,所述第一咬合部和所述第二咬合部松开以使所述可伸缩连杆组件长度可变。
4.根据权利要求3所述的穿戴物试用机器人,其特征在于,所述可变形点阵壳体还包括设置在相邻的所述可伸缩连杆组件之间的复位组件,所述复位组件用于将与其连接的相邻两个处于伸长状态的可伸缩连杆组件恢复至原始状态,且用于将相邻两个所述可伸缩连杆组件之间的间距恢复至原始状态。
5.根据权利要求4所述的穿戴物试用机器人,其特征在于,所述复位组件包括第一气动波纹管和第二气动波纹管,所述第一气动波纹管两端分别与相邻两个所述可伸缩连杆组件跨接,所述第二气动波纹管的第一端固定于所述第一气动波纹管且与所述第一气动波纹管连通,所述第二气动波纹管的第二端与对应的相邻两所述可伸缩连杆组件均固定连接,所述第二气动波纹管的第二端还与所述钳位夹的第一咬合部或者第二咬合部连接以复位时通过所述第二气动波纹管的收缩将所述第一咬合部和所述第二咬合部松开以使所述可伸缩连杆组件长度可变。
6.根据权利要求1所述的穿戴物试用机器人,其特征在于,所述可移动顶出机构包括运动控制组件以及定量顶出件,所述运动控制组件用于根据预设的人体三维数据控制所述定量顶出件绕所述环形轨道运动至预定的位置,所述定量顶出件用于根据预设的人体三维数据控制对应位置的所述可伸缩连杆组件伸长至预定的长度。
7.根据权利要求6所述的穿戴物试用机器人,其特征在于,运动控制组件包括至少一个第一伺服电机,定量顶出件包括与第一伺服电机连接的丝杆步进电机,所述丝杆步进电机包括丝杆和电机主体,第一伺服电机根据所述预设的人体三维数据带动丝杆步进电机运动至对应的位置,所述电机主体根据所述预设的人体三维数据控制所述丝杆伸出顶抵控制对应位置的所述可伸缩连杆组件伸长至预定的长度。
8.根据权利要求1所述的穿戴物试用机器人,其特征在于,所述可移动的顶出机构包括机械臂组件和第二伸缩杆,所述第二伸缩杆用于在所述第一方向改变所述机械臂组件的位置,所述机械臂组件包括依次首尾铰接的至少三节机械臂,所述机械臂组件中第一节的机械臂铰接在所述第二伸缩杆上,所述机械臂组件还包括控制相邻的所述机械臂之间以及所述第一节的机机械臂与所述第二伸缩杆之间的相对转动的第二伺服电机,所述机械臂之间相对转动和/或所述机械臂相对于所述第二伸缩杆转动时所述机械臂组件中最后一节的机械臂的位置改变以将所述可伸缩连杆组件顶出对应的预定长度。
9.根据权利要求1所述的穿戴物试用机器人,其特征在于,所述可移动顶出机构包括第三伸缩杆、三个固定杆、第一连接部、与所述固定杆一一对应的三个第一滑动杆,所述三个固定杆与所述第三伸缩杆固定连接,每一所述第一滑动杆的第一端均滑动设置在一个对应的所述固定杆上,三个所述第一滑动杆的第二端均连接在所述第一连接部上,各个所述第一滑动杆的第一端的位置在滑动改变时所述第一连接部位置在三个维度改变进而顶抵控制对应位置的所述可伸缩连杆组件伸长至预定的长度。
10.根据权利要求1所述的穿戴物试用机器人,其特征在于,所述可移动顶出机构包括第四伸缩杆、三个转动杆、第二连接部、与转动杆一一对应的三个第二滑动杆,所述三个转动杆均与第四伸缩杆可转动地连接,每一所述第二滑动杆的第一端均滑动设置在一个对应的所述转动杆上,三个所述第二滑动杆的第二端均连接在所述第二连接部上,各个所述转动杆在转动时和/或各个所述第二滑动杆的第一端在所述转动杆上滑动时所述第二连接部的位置在三个维度改变进而顶抵控制对应位置的所述可伸缩连杆组件伸长至预定的长度,所述第四伸缩杆用于在第一方向改变所述三个转动杆的位置。
11.根据权利要求1所述的穿戴物试用机器人,其特征在于,所述穿戴物试用机器人进一步包括至少一个第二变形部,所述第二变形部包括多层层叠设置的气囊组件,每一层气囊组件包括多个首尾连接且连通的片状气囊,每一层所述气囊组件均与一个电控气阀交换机的一个支路连接,所述电控气阀交换机与所述处理器连接,所述处理器根据预设的人体三维数据控制所述电控气阀交换机控制每一所述气囊组件的通气量,从而控制所述第二变形部变形至与所述预设的人体三维数据相符的形状。
12.根据权利要求11所述的穿戴物试用机器人,其特征在于,所述第二变形部进一步包括至少一个变形体,所述变形体设置在所述多层层叠的气囊组件的中间,每一变形体包括主动齿轴、与所述主动齿轴外啮合的至少三个层叠间隔设置的外齿圈、多个从动齿轴和多个齿杆,每一外齿圈的周围不同位置对应设置有两个与所述外齿圈啮合的所述从动齿轴,所述从动齿轴与所述齿杆一一对应且相互啮合,所述主动齿轴转动时带动所述外齿圈转动进而带动对应的所述从动齿轴转动进而带动对应的所述齿杆轴向运动以使所述变形体的外轮廓周长尺寸变大或者变小。
说明书
技术领域
本发明涉及穿戴物试用技术领域,特别是涉及一种穿戴物试用机器人。
背景技术
目前市场上对试衣机器人模特产品研发技术报告的方法不多,主要采用分块模型,通过控制分块模型的间距变大变小来与穿戴物匹配。例如上市时间2010年的德国产品,由30片单元组成的成像方式,上市时间2012年,香港,由28片单元组成上肢一共8块,下肢6块,腰部6块,胸部以上8块模型,然而这种试衣方式只能大致的模拟出真人的形状,数据不够精确,导致试衣得到的衣服,不是理想的尺寸,在穿到客户身上时并不是很合身。
因此,需要提供一种穿戴物试用机器人,以解决上述技术问题。
发明内容
本发明主要解决的技术问题是提供一种穿戴物试用机器人,能够提高穿戴物试用的准确性。
为解决上述技术问题,本发明采用的一种技术方案是:提供一种穿戴物试用机器人,穿戴物试用机器人包括处理器、至少一个压力传感器以及至少一个第一变形部,第一变形部包括可变形点阵壳体以及设置在可变形点阵壳体内部的伸缩机构和至少一个可移动顶出机构,可变形点阵壳体包括多个层叠间隔设置的环形轨道以及固定在环形轨道上且向环形轨道外侧延伸的多个可伸缩连杆组件,伸缩机构用于根据预设的人体三维数据控制穿戴物试用机器人沿第一方向的长度,可移动顶出机构用于根据预设的人体三维数据控制每一可伸缩连杆组件伸长至对应的预定的长度以使可变形点阵壳体变形至与预设的人体三维数据相符的形状,待试用的穿戴物在试用时穿在穿戴物试用机器人上,压力传感器用于在可变形点阵壳体变形至与预设的人体三维数据相符的形状时检测待试用穿戴物对压力传感器的压力,处理器用于根据压力传感器检测的压力生成舒适程度报告。
其中,每一可伸缩连杆组件包括第一连杆组件、第二连杆组件以及传动件,第一连杆组件包括首尾铰接的多个第一连杆,第二连杆组件包括与第一连杆同等数量的且首尾铰接的多个第二连杆,每一第一连杆与对应位置的第二连杆交错铰接,可移动顶出机构在顶抵传动件时带动可伸缩连杆组件伸长。
其中,传动件为顶杆,顶杆第一端与可伸缩连杆组件固定;或者,传动件为钳位夹,钳位夹包括第一夹部和与第一夹部弹性铰接的第二夹部,第一夹部包括分别位于第一夹部与第二夹部的铰接点两侧的第一咬合部和第一受力部,第二夹部包括分别位于铰接点两侧的第二咬合部和第二受力部,在可移动顶出机构未顶抵第一受力部和第二受力部时,第一咬合部和第二咬合部在弹性铰接的弹力作用下咬合在第一连接和第二连杆交错铰接的铰接轴上以使可伸缩连杆组件的长度稳定不变,在移动顶出机构顶抵第一受力部和第二受力部时,第一咬合部和第二咬合部松开以使可伸缩连杆组件长度可变。
其中,可变形点阵壳体还包括设置在相邻的可伸缩连杆组件之间的复位组件,复位组件用于将与其连接的相邻两个处于伸长状态的可伸缩连杆组件恢复至原始状态,且用于将相邻两个可伸缩连杆组件之间的间距恢复至原始状态。
其中,复位组件包括第一气动波纹管和第二气动波纹管,第一气动波纹管两端分别与相邻两个可伸缩连杆组件跨接,第二气动波纹管的第一端固定于第一气动波纹管且与第一气动波纹管连通,第二气动波纹管的第二端与对应的相邻两可伸缩连杆组件均固定连接,第二气动波纹管的第二端还与钳位夹的第一咬合部或者第二咬合部连接以复位时通过第二气动波纹管的收缩将第一咬合部和第二咬合部松开以使可伸缩连杆组件长度可变。
其中,伸缩机构包括至少一个第一伸缩杆,两环形轨道之间沿第一方向间隔设置,第一伸缩杆与环形轨道连接且在伸缩时控制相邻两环形轨道之间的间距变大或变小,第一伸缩杆的两端分别与可变形点阵壳体的两端固定且第一伸缩杆在伸缩时带动可变形点阵壳体沿第一方向的尺寸变大或变小。
其中,可移动顶出机构包括运动控制组件以及定量顶出件,运动控制组件用于根据预设的人体三维数据控制定量顶出件绕环形轨道运动至预定的位置,定量顶出件用于根据预设的人体三维数据控制对应位置的可伸缩连杆组件伸长至预定的长度。
其中,运动控制组件包括至少一个第一伺服电机,定量顶出件包括与第一伺服电机连接的丝杆步进电机,丝杆步进电机包括丝杆和电机主体,第一伺服电机根据预设的人体三维数据带动丝杆步进电机运动至对应的位置,电机主体根据预设的人体三维数据控制丝杆伸出顶抵控制对应位置的可伸缩连杆组件伸长至预定的长度。
其中,可移动的顶出机构包括机械臂组件和第二伸缩杆,第二伸缩杆用于在第一方向改变机械臂组件的位置,机械臂组件包括依次首尾铰接的至少三节机械臂,机械臂组件中第一节的机械臂铰接在第二伸缩杆上,机械臂组件还包括控制相邻的机械臂之间以及第一节的机机械臂与第二伸缩杆之间的相对转动的第二伺服电机,机械臂之间相对转动和/或机械臂相对于第二伸缩杆转动时机械臂组件中最后一节的机械臂的位置改变以将可伸缩连杆组件顶出对应的预定长度。
其中,可移动顶出机构包括第三伸缩杆、三个固定杆、第一连接部、与固定杆一一对应的三个第一滑动杆,三个固定杆与第三伸缩杆固定连接,每一第一滑动杆的第一端均滑动设置在一个对应的固定杆上,三个第一滑动杆的第二端均连接在第一连接部上,各个第一滑动杆的第一端的位置在滑动改变时第一连接部位置在三个维度改变进而顶抵控制对应位置的可伸缩连杆组件伸长至预定的长度。
其中,可移动顶出机构包括第四伸缩杆、三个转动杆、第二连接部、与转动杆一一对应的三个第二滑动杆,三个转动杆均与第四伸缩杆可转动地连接,每一第二滑动杆的第一端均滑动设置在一个对应的转动杆上,三个第二滑动杆的第二端均连接在第二连接部上,各个转动杆在转动时和/或各个第二滑动杆的第一端在转动杆上滑动时第二连接部的位置在三个维度改变进而顶抵控制对应位置的可伸缩连杆组件伸长至预定的长度,第四伸缩杆用于在第一方向改变三个转动杆的位置。
其中,穿戴物试用机器人进一步包括至少一个第二变形部,第二变形部包括多层层叠设置的气囊组件,每一层气囊组件包括多个首尾连接且连通的片状气囊,每一层气囊组件均与一个电控气阀交换机的一个支路连接,电控气阀交换机与处理器连接,处理器根据预设的人体三维数据控制电控气阀交换机控制每一气囊组件的通气量,从而控制第二变形部变形至与预设的人体三维数据相符的形状。
其中,第二变形部进一步包括至少一个变形体,变形体设置在所述多层层叠的气囊组件的中间,每一变形体包括主动齿轴、与主动齿轴外啮合的至少三个层叠间隔设置的外齿圈、多个从动齿轴和多个齿杆,每一外齿圈的周围不同位置对应设置有两个与外齿圈啮合的从动齿轴,从动齿轴与齿杆一一对应且相互啮合,主动齿轴转动时带动外齿圈转动进而带动对应的从动齿轴转动进而带动对应的齿杆轴向运动以使所述变形体的外轮廓周长尺寸变大或者变小
本发明的有益效果是:本发明通过设置穿戴物试用机器人包括处理器、至少一个压力传感器以及至少一个第一变形部,第一变形部包括可变形点阵壳体以及设置在可变形点阵壳体内部的伸缩机构和至少一个可移动顶出机构,可变形点阵壳体包括多个层叠间隔设置的环形轨道以及固定在环形轨道上且向环形轨道外侧延伸的多个可伸缩连杆组件,伸缩机构用于根据预设的人体三维数据控制穿戴物试用机器人沿第一方向的长度,可移动顶出机构用于根据预设的人体三维数据控制每一可伸缩连杆组件伸长至对应的预定的长度以使可变形点阵壳体变形至与预设的人体三维数据相符的形状,待试用的穿戴物在试用时穿在穿戴物试用机器人上,压力传感器用于在可变形点阵壳体变形至与预设的人体三维数据相符的形状时检测待试用穿戴物对压力传感器的压力,处理器用于根据压力传感器检测的压力生成舒适程度报告。通过上述方式能够提高穿戴物试用的准确性。
附图说明
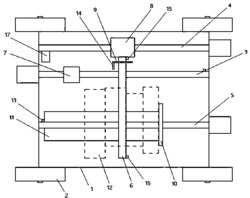
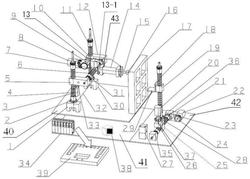
图1是本发明穿戴物试用机器人的结构示意图;
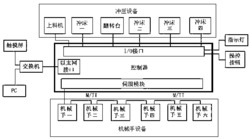
图2是本发明穿戴物试用机器人原理模块图;
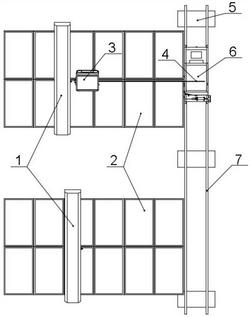
图3是本发明第一实施例的穿戴物试用机器人的第一变形部的沿图1中A-A方向的横截面结构示意图;
图3a是本发明第一变形部内部的局部立体结构示意图;
图4是本发明可伸缩连杆组件的结构示意图;
图5是可伸缩连杆组件另一实施方式的结构示意图;
图6是钳位夹的结构示意图;
图6a是本发明左右相邻的两可伸缩连杆组件和之间的复位组件的结构示意图;
图7是本发明穿戴物试用机器人的第一变形部内部结构的侧视示意图;
图8是本发明连杆机构的结构示意图;
图8a为第一伺服电机与环形轨道的安装结构示意图;
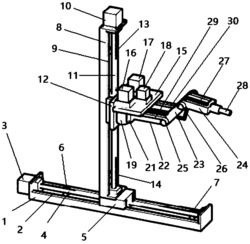
图9是本发明在可移动顶出机构的第二种实施方式的结构示意图;
图10是本发明可移动顶出机构第三种实施方式的结构示意图;
图11是本发明可移动顶出机构第四种实施方式的结构示意图;
图12是本发明第二变形部的结构示意图;
图12a是本发明第二变形部沿图1中B-B方向的截面图;
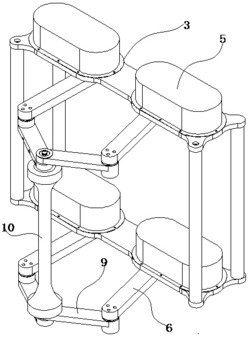
图13是本发明变形体除去壳体后的内部结构示意图;
图14是本发明变形体的外部结构示意图。
具体实施方式
下面结合附图和实施例对本发明进行详细的说明。
本发明实施例所述的穿戴物可以为头盔、帽子、上衣、大衣、连身衣裤、手套、袜子、内裤、长裤、短裤、胸罩等。穿戴物试用机器人形状为人体的形状包括躯干、四肢、头、脚等,在特定需要的情况下可以省略某些部位,例如当穿戴物为上身时,穿戴物试用机器人可以不包括下身,当然,穿戴物试用机器人可以为完整的人的形状可以试用任何一种穿戴在人体上的穿戴物。
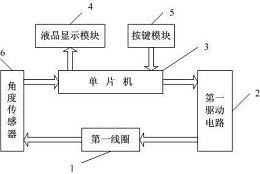
请参阅图1和图2,图1是本发明穿戴物试用机器人的结构示意图。图2是本发明穿戴物试用机器人原理模块图。
在本实施例中,穿戴物试用机器人包括第一变形部1和第二变形部2中的至少一者、处理器3和至少一个压力传感器4。
其中,穿戴物试用机器人的躯干采用第一变形部1实现,四肢、脖子采用第二变形部2实现,在其他实施例中,躯干也可以采用第二变形部2实现,四肢、脖子也可以采用第一变形部1实现。第一变形部1和第二变形部2均为不规则或者规则的圆筒状。第二变形部2的外轮廓直径小于第一变形部1的外轮廓直径。
根据需要可以设定不同的穿戴物试用机器人,例如,第一种,穿戴物试用机器人可以仅包括由第一变形部1定义的躯干,那么可以用来试穿背心,胸罩、抹胸等等;再例如,第二种,穿戴物试用机器人可以包括由第一变形部1和两个第二变形部2定义的躯干和两个手臂,那么可以用来试穿背心,胸罩、抹胸、长袖衣服、短袖衣服;再例如,第三种,穿戴物试用机器人可以包括由第一变形部1、三个第二变形部2定义的躯干、两个手臂、脖子,那么可以用来试穿背心,胸罩、抹胸、长袖衣服、短袖衣服、高领类衣服;其他的还有很多种根据第一变形部1和第二变形部2的不同组合形成的穿戴物试用机器人均在本发明保护范围之内,适用于不同的衣服,此处不再一一列举。
请结合参阅图3,图3是本发明第一实施例的穿戴物试用机器人的第一变形部的沿图1中A-A方向的横截面结构示意图。在本实施例中,第一变形部1包括可变形点阵壳体11以及设置在可变形点阵壳体11内部的伸缩机构12和至少一个可移动顶出机构13。
可变形点阵壳体11包括多个层叠间隔设置的环形轨道111以及固定在环形轨道111上且向环形轨道111外侧延伸的多个可伸缩连杆组件112,伸缩机构12用于根据预设的人体三维数据控制穿戴物试用机器人沿第一方向的长度,可移动顶出机构13用于根据预设的人体三维数据控制每一对应位置的可伸缩连杆组件112伸长至对应的预定的长度以使可变形点阵壳体11变形至与预设的人体三维数据相符的形状,待试用的穿戴物在试用时穿在穿戴物试用机器人上,压力传感器4用于在可变形点阵壳体11变形至与预设的人体三维数据相符的形状时检测待试用穿戴物对压力传感器4的压力,处理器3用于根据压力传感器4检测的压力生成舒适程度报告。应理解,可伸缩连杆组件112数量为多个且均固定在环形轨道111上且向环形轨道111外侧延伸,具体设置有一圈可伸缩连杆组件112围绕环形轨道111,图中仅画出了一个。
优选地,压力传感器4设置在可伸缩连杆组件112远离环形轨道111的一端。
可以理解,穿戴物试用机器人还包括数据输入模块5,用户可以通过数据输入模块5输入前述的预设的人体三维数据。当然,在其他实施例中,数据输入模块5也可以用数据接收模块代替,接收外界传输的人体三维数据。例如,数据输入模块5可以为键盘或者触控屏,数据接收模块可以为WIFI模块、或者蓝牙模块、USB接口等。
可以理解,伸缩机构12用于根据预设的人体三维数据控制穿戴物试用机器人沿第一方向的长度,是指处理器3根据预设的人体三维数据来控制伸缩机构12伸缩从而控制穿戴物试用机器人的长度,其中包括控制第一变形部1的长度,人体三维数据包括第一变形部1的长度数据。可移动顶出机构13用于根据预设的人体三维数据控制每一对应位置的可伸缩连杆组件112伸长至对应的预定的长度以使可变形点阵壳体11变形至与预设的人体三维数据相符的形状,是指处理器3根据预设的人体三维数据来控制可移动顶出机构13找到并运动至对应位置的可伸缩连杆组件112处,然后将对应位置的可伸缩连杆组件112顶出对应的预定长度,对应的位置和对应的长度都是根据预设的人体三维数据来确定的。
图3中仅示出两个可伸缩连杆组件112实际应为可伸缩连杆组件应该为排满环形轨道111的一圈,且每一可伸缩连杆组件112均向所述环形轨道111的外侧延伸。
请参阅图3a,图3a是本发明第一变形部内部的局部立体结构示意图。图3中示出的为左右相邻的可伸缩连杆组件112的结构及其之间的连接关系,图3a示出上下两个相邻的可伸缩连杆组件112的结构及其之间的连接关系。
结合图3a请进一步参阅图4,图4是本发明可伸缩连杆组件的结构示意图。每一可伸缩连杆组件112包括第一连杆组件S、第二连杆组件T以及传动件U,第一连杆组件S包括首尾铰接的多个第一连杆S1,第二连杆组件T包括与第一连杆S1同等数量的且首尾铰接的多个第二连杆T1,每一第一连杆S1与对应位置的第二连杆T2交错铰接,可移动顶出机构13在顶抵传动件U时带动可伸缩连杆组件112伸长。传动件U与如图3a所述可伸缩连杆组件112为平行的两层,平行的两层可伸缩连杆组件对应位置的铰接轴V共用,两层的可伸缩连杆组件结构使得伸缩时更加稳定。图3a中的环形轨道111仅示出半圈,实际应为一整圈,图中仅为示意。
在一种情况下,如图3所示,传动件U可以为顶杆U,顶杆U的一端与可伸缩连杆组件112固定。具体地,顶杆U的一端与可伸缩连杆组件112中第一连杆S1和第二连杆T2铰接处的一铰接轴V固定。
或者在另一种情况下,请参阅图3a和图5,图5是可伸缩连杆组件另一实施方式的结构示意图。图6是钳位夹的结构示意图。传动件W为钳位夹W,钳位夹W包括第一夹部61和与第一夹部61弹性铰接的第二夹部62,第一夹部61包括分别位于第一夹部61与第二夹部62的铰接点X两侧的第一咬合部611和第一受力部612,第二夹部62包括分别位于铰接点X两侧的第二咬合部621和第二受力部622,在可移动顶出机构13未顶抵第一受力部612和第二受力部622时,第一咬合部611和第二咬合部621在弹性铰接的弹力作用下咬合在第一连杆S1和第二连杆T1交错铰接的铰接轴V上以使可伸缩连杆组件112的长度稳定不变,在可移动顶出机构13顶抵第一受力部612和第二受力部622时,第一咬合部611和第二咬合部621松开以使可伸缩连杆组件112长度可变。钳位夹W在不受外力的情况下,弹性铰接的弹力为使钳位夹W夹紧的力。可移动顶出机构13在顶抵时是先顶抵第一受力部612和第二受力部622的斜面上使得第一咬合部611和第二咬合部621松开然后再顶中间的平整的部分推动可伸缩连杆组件112伸长。
请参阅图5,可变形点阵壳体11还包括与可伸缩连杆组件112一一对应的连接连杆组件114,连接连杆组件114,每一可伸缩连杆组件均通过连接连杆组件114与环形轨道111连接。优选地,连接连杆组件114包括第五连杆114a、第六连杆114b和横跨杆114c,第五连杆114a的第一端与第一连杆组件S端部的第一连杆S1铰接,第五连杆114a的第二端与环形轨道111铰接,第六连杆114b的第一端与第二连杆组件T端部的第二连杆T1铰接,第六连杆114b的第二端与环形轨道111铰接,横跨杆114c的两端分别与第五连杆114a的中间段(优选为中点处)和第六连杆114b的中间段(优选为中点处)铰接。连接连杆组件114也为两层结构,且对应位置共用铰接轴。
优选地,可变形点阵壳体11还包括设置在相邻的可伸缩连杆组件112之间的复位组件113,复位组件113用于将与其连接的相邻两个处于伸长状态的可伸缩连杆组件112恢复至原始状态,且用于将相邻两个可伸缩连杆组件112之间的间距恢复至原始状态。
优选地,复位组件113包括第一气动波纹管y和第二气动波纹管z,第一气动波纹管y两端分别与相邻两个可伸缩连杆组件112跨接,第二气动波纹管z的第一端固定于第一气动波纹管y且与第一气动波纹管y连通,第二气动波纹管z的第二端与对应的相邻两可伸缩连杆组件112均连接。优选地,第二气动波纹管z的第二端连接横杆p,横杆p的两端分别与相邻的两可伸缩连杆组件112连接,具体是与铰接轴V可转动连接,即铰接轴穿设在横杆p的孔中。上下相邻的两可伸缩连杆组件112(连接在不同环形轨道111上的)和左右相邻的两可伸缩连杆组件112(连接在相同的环形轨道111上的)之间均设置有复位组件113。可以理解,第二气动波纹管z连接气管,气管o连接电控气阀,电控气阀连接气泵,气泵控制第一气动波纹管y和第二气动波纹管z缩短,带动可伸缩连杆组件112恢复至原始状态。
请参阅图6a,图6a是本发明左右相邻的两可伸缩连杆组件和之间的复位组件的结构示意图。第二气动波纹管z的第二端还与钳位夹W的第一咬合部611或者第二咬合部621铰接以复位时通过所述第二气动波纹管z的收缩拉动第一咬合部611或第二咬合部612将所述钳位夹W的第一咬合部611和第二咬合部621松开以使所述可伸缩连杆组件112长度可变。具体的,第二气动波纹管z的第二端与一个钳位夹W的第一咬合部611铰接以及与另一个与该钳位夹W相邻的钳位夹W的第二咬合部621铰接。
如图3所示,在第一种实施方式中,可移动顶出机构13包括至少运动控制组件132以及定量顶出件133,运动控制组件132用于根据预设的人体三维数据控制定量顶出件133绕环形轨道111运动至预定的位置,定量顶出件133用于根据预设的人体三维数据顶抵控制对应位置的可伸缩连杆组件112伸长至预定的长度。
请结合图3进一步参阅图7,图7是本发明穿戴物试用机器人的第一变形部内部结构的侧视示意图。伸缩机构12包括至少一个第一伸缩杆121,第一伸缩杆121与环形轨道111连接且在伸缩时控制相邻两环形轨道111之间的间距变大或变小,第一伸缩杆121的两端分别与可变形点阵壳体11的两端固定且第一伸缩杆121在伸缩时带动可变形点阵壳体沿第一方向的尺寸变大或变小。优选地。环形轨道111的数量为50-100个,每个宽度为10-15mm,当然在其他实施例中环形轨道111的数量可以为其他数量。具体地,如图3所示,伸缩机构12包括两个第一伸缩杆121,环形轨道111与伸缩机构12的连接方式有两种可能,一种是位于上下两端的环形轨道111(如图7所示)与第一伸缩杆121固定连接不可相对滑动;第二种是位于中间部分的环形轨道111,第一伸缩杆121通过两个耳状连接部111a与中间部分的环形轨道111可滑动连接,第一伸缩杆121穿设在对应的耳状连接部中。通过上述的设置方式,第一伸缩杆121在伸缩时,力作用在上下两端的两个环形轨道111上并带动整个第一变形部1的长度变长。
优选地,伸缩机构12还包括位于两两环形轨道111之间的连杆机构122。
进一步参阅图8,图8是本发明连杆机构的结构示意图。优选地,连杆机构122包括第三连杆组件L和第四连杆组件M,第三连杆组件L包括首尾铰接的多个第三连杆L1,第四连杆组件M包括与第三连杆L1同等数量的且首尾铰接的多个第四连杆M1,每一第三连杆L1与对应位置的第四连杆M1交错铰接。通过在环形轨道111之间设置连杆机构122能够使得伸缩机构12的伸缩运动更加稳定。环形轨道111连接在图8中所示的N1处。
优选地,运动控制组件132包括至少一个第一伺服电机134。优选地,运动控制组件132包括两个第一伺服电机134。当然在其他实施例中,第一伺服电机134可以为其他数量,例如一个或者多个。
请参阅图8a,图8a为第一伺服电机与环形轨道的安装结构示意图。具体为环形轨道的横截面方向的剖面示意图。第一伺服电机134包括安装壳91安装在安装壳91内部的电机主体92、安装在电机主体92的转轴上的主动齿轮93、可转动安装在安装壳91内部的从动齿轮94以及可转动安装在安装壳91上的滑轮95。环形轨道111夹在滑轮95与从动齿轮94之间,环形轨道111与滑轮95接触的外侧表面96为光滑(不设置齿),环形轨道111与从动齿轮94接触的内侧表面97上设置有齿,第一伺服电机134的转轴转动时主动齿轮93转动,主动齿轮93带动与主动齿轮93啮合的从动齿轮94转动,从动齿轮94又与环形轨道111的内侧表面的齿97啮合,从而使得电机主体92的转轴转动时第一伺服电机114在环形轨道111上移动。
定量顶出件133为与第一伺服电机134连接的丝杆步进电机133。丝杆步进电机133固定在两个第一伺服机134中间。
丝杆步进电机133包括丝杆136和电机主体135,第一伺服电机134根据预设的人体三维数据带动丝杆步进电机133运动至对应的位置,电机主体135根据预设的人体三维数据控制丝杆136伸出将对应位置可伸缩连杆组件112伸出对应的预定的长度。丝杆步进电机133与第一伺服机134的安装壳91固定。丝杆136具体用于顶抵前述的传动件U或者传动件W。
请参阅图9,图9是本发明在可移动顶出机构的第二种实施方式的结构示意图。在可移动顶出机构的第二种实施方式中,可移动的顶出机构22包括机械臂组件221和第二伸缩杆222,第二伸缩杆222用于在第一方向改变机械臂组件221的位置,机械臂组件221包括依次首尾铰接的至少三节机械臂221a,221b,221c,机械臂组件221中的第一节的机械臂221a与第二伸缩杆222铰接。机械臂组件221还包括控制相邻的机械臂221a,221b,221c之间以及第一节的机械臂221a与第二伸缩杆222之间的相对转动的第二伺服电机221d,机械臂组件221中第一节的机械臂221固定在第二伸缩杆222上。机械臂之间相对转动和/或机械臂相对于第二伸缩杆222转动时机械臂组件中最后一节的机械臂221c的位置改变以将对应位置的可伸缩连杆组件112顶出对应的预定长度。优选地,机械臂221a,221b,221c均在一个垂直于第一方向的平面内转动,直至第二伸缩杆222沿第一方向运动改变机械臂组件的位置时,机械臂221a,221b,221c在另一个平面内转动,如此一圈一圈的实现不同位置的可伸缩连杆组件112的伸出长度控制。优选地,可移动顶出机构22还可以包括第一旋转控制机构(图未示),第一旋转控制机构可以是由电机实现,第二伸缩杆222可在第一旋转控制机构驱动下旋转从而带动机械臂组件221绕第二伸缩杆222旋转改变位置,图中第二伸缩杆222的所在的方向,竖直方向即为第一方向。优选地,在一种实施例中,最后一节的机械臂221c的自由端也安装有如图3所示的定量顶出件,以使顶出长度进行微调更为精确,此处不再赘述。
请参阅图10,图10是本发明可移动顶出机构第三种实施方式的侧视结构示意图。在可移动顶出机构的第三种实施方式中,可移动顶出机构32包括第三伸缩杆321、三个固定杆322、第一连接部323、与固定杆322一一对应的三个第一滑动杆324,三个固定杆322与第三伸缩杆321固定连接,每一第一滑动杆324的第一端均滑动设置在一个对应的固定杆322上,三个第一滑动杆324的第二端均连接在第一连接部323上,各个第一滑动杆324的第一端的位置在滑动改变时第一连接部323位置在三个维度改变进而将对应位置的可伸缩连杆组件112顶出对应的预定的长度,第三伸缩杆321用于在第一方向改变三个固定杆322的位置。优选地,可移动顶出机构32还包括第二旋转控制机构(图未示),第三伸缩杆321可在第二旋转控制机构驱动下旋转从而带动三个固定杆322绕第三伸缩杆321旋转改变方向。第三伸缩杆321沿第一方向设置且位于可变形点阵壳体11定义的空间的正中间位置(环形轨道111的正中间位置),以使得第三伸缩杆321带动三个固定杆322转动时不会碰到可变形点阵壳体11。优选地,在一种实施例中,第一连接部323也安装有如图3所示的定量顶出件,以使顶出长度进行微调更为精确,此处不再赘述。
请参阅图11,图11是本发明可移动顶出机构第四种实施方式的结构示意图。可移动顶出机构包括第四伸缩杆421、三个转动杆422、第二连接部423、与转动杆422一一对应的三个第二滑动杆424,三个转动杆422与第四伸缩杆421可转动地连接,每一第二滑动杆424的第一端均滑动设置在一个对应的转动杆422上,三个第二滑动杆424的第二端均连接在第二连接部423上,各个转动杆422在转动时和/或各个第二滑动杆424的第一端在转动杆422上滑动时第二连接部423的位置在三个维度改变进而将对应位置的可伸缩连杆组件112顶出对应的预定的长度,第四伸缩杆421用于在第一方向改变三个转动杆422的位置。优选地,可移动顶出机构42还包括第三旋转控制机构(图未示),第四伸缩杆421可在第二旋转控制机构驱动下旋转从而带动三个转动杆422绕第四伸缩杆421旋转改变方向。类似的,第四伸缩杆421位于可变形点阵壳体11定义的空间的正中间位置。优选地,在一种实施例中,第二连接部423也安装有如图3所示的定量顶出件,以使顶出长度进行微调更为精确,此处不再赘述。
请参阅图12和图12a,图12是本发明第二变形部的气囊组件在展开状态下的结构示意图,图12a是本发明第二变形部沿图1中B-B方向的截面图。第二变形部2包括多层层叠设置的气囊组件70、外层弹性布75。每一层气囊组件70包括多个首尾连接且连通的片状气囊701,每一层气囊组件701均与一个电控气阀交换机的一个支路连接,电控气阀交换机与处理器3连接,处理器3根据预设的人体三维数据控制电控气阀交换机控制每一气囊组件701的通气量,从而控制第二变形部2变形至与预设的人体三维数据相符的形状。外层弹性布75包裹在最外层的气囊组件70上。
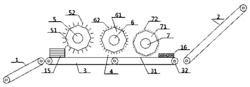
参阅图13,图13是本发明变形体除去壳体后的内部结构示意图。优选地,第二变形部2还可以包括位于气囊组件70中间的多个变形体2a(沿第二变形部2的长度方向设置在不同位置),即气囊组件70逐层绕设在变形体2a上,每一变形体2a包括主动齿轴51、与主动齿轴51外啮合的至少三个层叠间隔设置的外齿圈52、多个从动齿轴53和多个齿杆54,每一外齿圈52的周围不同位置对应设置有两个与外齿圈52啮合的从动齿轴53,从动齿轴53与齿杆54一一对应且相互啮合,主动齿轴51转动时带动外齿圈52转动进而带动对应的从动齿轴51转动进而带动对应的齿杆54轴向运动以使变形体2a的外轮廓周长尺寸变大或者变小。优选地,每一外齿圈52带动的对应的两个齿杆54的运动方向相反。请参阅图14,图14是本发明变形体的外部结构示意图。变形还2a包括外壳55,主动齿轴51、外齿圈52、多个从动齿轴53和多个齿杆54均设置在外壳55内。齿杆54在外壳55内且可沿其自身轴向运动,可由孔56伸出。主动齿轴51、外齿圈52、多个从动齿轴53可在外壳55内自由转动。每一齿杆54上对应固定有一块子壳体(图未示),子壳体拼凑成变形体的壳体,齿杆54推动子壳体向外撑开控制变形体体积变大,齿杆54收回时子壳体收回控制变形体2a的体积变小。第二变形部2进一步包括伸缩装置71,伸缩装置71穿设在多个沿第二变形部2长度方向设置的变形体2a中间,伸缩装置例如为电动或者气动的伸缩杆71,从而控制第一变形部2的长度变大或者变小。伸缩杆71穿设在变形体2a中间,如图所示变形体2a中间均留有容纳伸缩杆71的空间。位于第二变形部2两端部的变形体2a与其周围的气囊组件70固定连接,位于中间的变形体2a与其周围的气囊组件不连接。多个变形体2a在控制第二变形部2的粗细时先通过变形体初步的控制,然后再通过微调控制充气量控制气囊组件70的从而控制第二变形部2变形至与预设的人体三维数据相符的形状。
压力传感器4还设置在第二变形部2的外表面,压力传感器4用于在第二变形部,变形至与预设的人体三维数据相符的形状时检测待试用穿戴物对压力传感器4的压力,处理器3用于根据压力传感器4检测的压力生成舒适程度报告。
用户根据检测的压力为穿戴物试用机器人更换其他尺寸的穿戴物,当检测到的压力值在预设范围内时,舒适程度达标,则停止更换其他尺寸的穿戴物,穿戴物试穿成功,若检测到的压力值过大(太紧)或者过小(太宽松),则继续更换其他尺寸的穿戴物,直至舒适程度达标为止。
以上所述的所有主动执行元件(例如控制主动齿轴51转动的电机,可移动顶出机构13、伸缩机构12等等)均是由处理器3根据数据输入模块5输入的人体三维数据运动。
本发明通过设置戴物试用机器人包括处理器、至少一个压力传感器和至少一个第一变形部,第一变形部包括可变形点阵壳体、设置在可变形点阵壳体内部的伸缩机构和至少一个可移动顶出机构,待试用的穿戴物在试用时穿在穿戴物试用机器人上,可变形点阵壳体包括多个可伸缩连杆组件和连接在相邻两个可伸缩连杆组件之间的连接机构,两相邻的可伸缩连杆组件通过连接机构可滑动连接,伸缩机构用于根据预设的人体三维数据控制穿戴物试用机器人沿第一方向的长度,可移动顶出机构用于根据预设的人体三维数据控制每一可伸缩连杆组件伸出对应的预定的长度以使可变形点阵壳体变形至与预设的人体三维数据相符的形状,压力传感器用于在可变形点阵壳体变形至与预设的人体三维数据相符的形状时检测待试用穿戴物对压力传感器的压力,处理器用于根据压力传感器检测的压力生成舒适程度报告,通过上述方式能够提高穿戴物试用的准确性。
以上所述仅为本发明的实施方式,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
穿戴物试用机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0