









专利摘要
本发明公开一种电力系统混沌振荡的固定时动态面高阶滑模控制方法,包括:(1)确定需要补偿的电力系统无功功率;(2)建立电流源型静止同步补偿控制器的数学模型,确定电流源型静止同步补偿控制器的输出及参考值;(3)确定控制目标值:输出能在有限时间内到达其参考值任意小的邻域内,而且该收敛时间的上界不依赖于初值;(4)设计固定时动态面高阶滑模面及控制律,实现控制目标;(5)根据李雅普诺夫函数稳定性分析,确定所设计的控制律的控制参数。本发明方法能够使系统在任何初始运行条件下,均能在预定的时间内实现系统稳定,并且克服了抖振现象,获得更好的暂态响应,加快了收敛速度,提高电力系统的稳定性。
权利要求
1.一种电力系统混沌振荡的固定时动态面高阶滑模抑制方法,其特征在于,包括:
(1)根据发生混沌振荡时的无功负荷和将电力系统电压稳定到理想值Vd=1对应的无功负荷之间的差值,确定需要补偿的电力系统无功功率;
(2)建立电流源型静止同步补偿控制器的数学模型,确定电流源型静止同步补偿控制器的输出,确定各输出量的参考值;
(3)确定控制目标:电流源型静止同步补偿控制器的输出能在有限时间内到达其参考值任意小的邻域内,而且该收敛时间的上界不依赖于初值;
(4)设计固定时动态面高阶滑模面及控制律,实现控制目标;
(5)根据李雅普诺夫函数稳定性分析,确定所设计的控制律的控制参数。
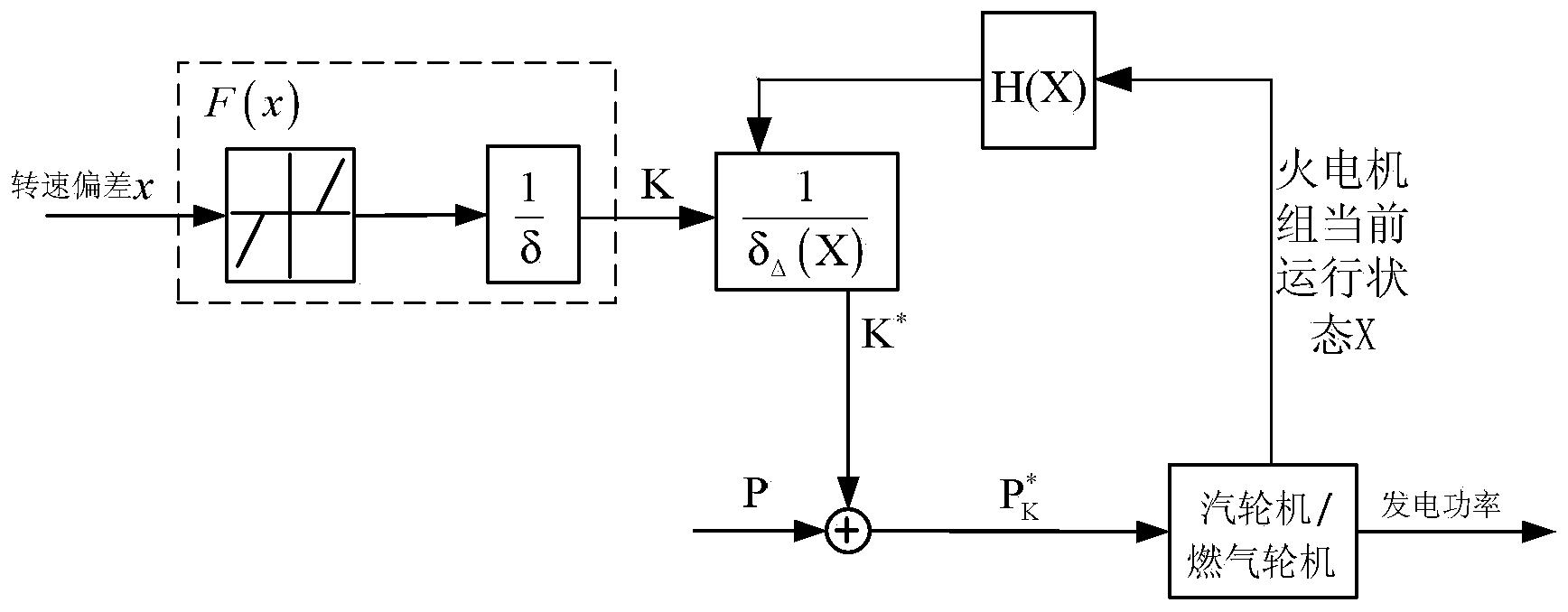
2.根据权利要求1所述的一种电力系统混沌振荡的固定时动态面高阶滑模抑制方法,其特征在于,步骤(2)中电流源型静止同步补偿控制器的数学模型为:
其中,Idc表示dc侧电流,Rdc表示电流源变换器切换和传导电阻,Ldc为平波电抗器的电感,Md和Mq为控制输入,Vd和Vq为滤波电容器两端电压的d轴和q轴分量;n为变换器变比;Id和Iq表示变换器二次侧电流的d轴和q轴分量;ω是转子角速度;L和R表示变换器的电感和电阻;Ed表示线电压的d轴分量;C为滤波电容器的电容;电流源型静止同步补偿控制器的输出为Idc和Iq;
步骤(2)中输出参考值的选择:给定Idc的参考值Idcref,输出Iq参考值根据下式确定:
式中Q1为发生混沌振荡的无功负荷值,Q2为使电力系统恢复理想电压Vd=1对应的无功负荷值。
3.根据权利要求1所述的一种电力系统混沌振荡的固定时动态面高阶滑模抑制方法,其特征在于,步骤(4)中所设计的滑模面为:
σ2=Iq-Iqref(4)
关于σ1的三阶滑模控制器等价于下面的系统:
式中:
x1=σ1,u1=MdIdc
关于σ2二阶滑模控制器等价于下面的系统:
式中:
x4=σ2,u2=MqIdc
对于三阶滑模系统(5)设计固定时动态面高阶滑模控制律:
对于二阶滑模系统(6)设计固定时动态面高阶滑模控制律:
控制律(15)中α3,β3,τ2,m,n为待设计的控制参数;e3=x3-ε2,其中新变量ε2的动态满足:
式中虚拟控制律 设计为:
式中,α2,β2和τ1为待设计的控制参数,e2=x2-ε1,ε1的动态满足:
式中,虚拟控制律 设计为:
式中,α1,β1为待设计的控制参数;
控制律(20)中α'2,β2',τ4,m,n为待设计的控制参数,e5=x5-ε4,其中新变量ε4的动态满足:
式中,虚拟控制律 设计为:
式中,α′1,β′1为待设计的控制参数。
4.根据权利要求1所述的一种电力系统混沌振荡的固定时动态面高阶滑模抑制方法,其特征在于,步骤(5)中三阶滑模系统(5)的控制参数的选择使得以下不等式成立:
其中参数γ1,λ1,γ2,λ2,η2,η3为任意的正实数;m和n为正奇整数,且满足m>n和(m+n)/2为正奇整数;
步骤(5)中二阶滑模系统(6)的控制参数的选择使得以下不等式成立:
其中参数γ4,λ4和η5为任意的正实数;m和n为正奇整数,且满足m>n和(m+n)/2为正奇整数。
5.根据权利要求1所述的一种电力系统混沌振荡的固定时动态面高阶滑模抑制方法,其特征在于,还包括以下步骤:
(6)采用步骤(5)确定的三阶滑模系统(5)的控制参数和二阶滑模系统(6)的控制参数对电流源型静止同步补偿控制器实施控制,对电力系统进行无功补偿,抑制电力系统的混沌振荡。
说明书
技术领域
本发明属于电气工程领域,特别涉及一种电力系统混沌振荡的有限时抑制方法。
背景技术
电力系统,作为一种复杂的非线性动力学系统,具有丰富的非线性动力学行为。随着用电负荷的不断增长,现代电力系统更有可能运行在稳定域边界附近,在系统遭受外界扰动时,就会发生混沌振荡现象。混沌振荡破坏电力系统稳定性,造成功角失稳,频率振荡和电压崩溃,甚至诱发大面积停电事故。因此为了保障电力系统安全稳定运行,需要研究电力系统混沌振荡的控制方法。
混沌振荡是电压崩溃的一种重要的动态机理。为了抑制混沌振荡,避免电压崩溃,需要对电力系统进行无功补偿。既有电力系统混沌振荡抑制方法存在的问题主要有:1.所提出的控制方案无法实现有限时收敛,从电力系统运行的角度来说,只有能够在有限时抑制的振荡才是可接受的振荡;2.所提出的控制方案主要使用静止无功补偿器来补偿多余的无功功率。
在电力系统中,静止同步补偿器是另一种可以补偿无功功率的FACTS装置。同静止无功补偿器相比,静止同步补偿器能够实现更好的控制效果,并能提供更好的振荡阻尼。目前为止,还缺少报道使用静止同步补偿器抑制电力系统混沌振荡的控制方法。静止同步补偿器主要分为基于电压源变换器拓扑的(电压源型静止同步补偿器)和基于电流源变换器拓扑的(电流源型静止同步补偿器)。其中,基于电流源变换器拓扑的静止同步补偿器在各种性能指标上优于基于电压源变换器拓扑的静止同步补偿器。
由于切换操作,电力变换器可以认为是一种变结构的系统。作为一种变结构控制,滑模控制非常适合于设计不同的电力变换器切换方案。滑模控制具有对于外部干扰和参数摄动的鲁棒性的优势。然而,一阶滑模控制具有抖振现象,这将降低控制精度,使暂态响应变差,增加控制能耗,损坏设备,造成系统失稳。
电力系统混沌振荡破坏电力系统稳定性,损坏电气设备,需要在尽可能短的时间内得以有效抑制。有限时稳定控制能够实现快速的收敛。然而,有限时控制的收敛时间依赖于系统的初值。事实上,在电力系统中,系统的运行点不断变化,初值难以获得,因此收敛时间无法确定,而电力系统运行要求振荡必须在规定的时间内稳定,这给控制器的设计带来麻烦。
由于上述控制方法均存在问题,因此需要针对电流源型静止同步补偿器设计一种新的控制方法,使得电力系统混沌振荡在不依赖于初值的有限时间内得到抑制,并克服控制过程中出现的抖振现象。
发明内容
本发明的目的在于提供一种电力系统混沌振荡的固定时动态面高阶滑模抑制方法,以克服现有控制方法存在的不足;使得电力系统混沌振荡在不依赖于初值的有限时间内得到抑制,并克服控制过程中出现的抖振现象。
为了实现上述目的,本发明采用如下技术方案:
一种电力系统混沌振荡的固定时动态面高阶滑模控制方法,包括:
(1)根据发生混沌振荡时的无功负荷和将电力系统电压稳定到理想值Vd=1对应的无功负荷之间的差值,确定需要补偿的电力系统无功功率;
(2)建立电流源型静止同步补偿控制器的数学模型,确定电流源型静止同步补偿控制器的输出,确定各输出量的参考值;
(3)确定控制目标:电流源型静止同步补偿控制器的输出能在有限时间内到达其参考值任意小的邻域内,而且该收敛时间的上界不依赖于初值;
(4)设计固定时动态面高阶滑模面及控制律,实现控制目标;
(5)根据李雅普诺夫函数稳定性分析,确定所设计的控制律的控制参数。
进一步的,步骤(2)中电流源型静止同步补偿控制器的数学模型为:
其中,Idc表示dc侧电流,Rdc表示电流源变换器切换和传导电阻,Ldc为平波电抗器的电感,Md和Mq为控制输入,Vd和Vq为滤波电容器两端电压的d轴和q轴分量;n为变换器变比;Id和Iq表示变换器二次侧电流的d轴和q轴分量;ω是转子角速度;L和R表示变换器的电感和电阻;Ed表示线电压的d轴分量;C为滤波电容器的电容。电流源型静止同步补偿控制器的输出为Idc和Iq;
步骤(2)中输出参考值的选择:给定Idc的参考值Idcref,输出Iq参考值根据下式确定:
式中Q1为发生混沌振荡的无功负荷值,Q
电力系统混沌振荡的固定时动态面高阶滑模抑制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0