










专利摘要
本发明公开了一种旋翼式无人机失控坠落保护装置,其技术方案要点是包括:弹射筒内安装有顶板,顶板将弹射筒分隔成高压腔和弹射腔,弹射腔内安装有自抛式降落伞,高压腔的底部开设有进气口;高压气罐通过导气管分别连接于两个弹射筒的进气口,且在两个进气口处分别安装有电磁阀;弹射启闭门铰接于弹射筒的开口,该铰接轴上安装有扭力弹簧,弹射筒上安装有用于将弹射启闭门封闭在其开口上的固定部;姿态传感器,其设于机体内周期性检测机体的姿态变化数据;控制模块,接收该姿态变化数据,根据该倾角角度输出相应的控制信号至对应的电磁阀和固定部,以控制对应弹射筒内的自抛式降落伞在高压气体下被压出弹射腔外。
权利要求
1.一种旋翼式无人机失控坠落保护装置,包括机体(1),所述机体(1)具有正面(101)和背面(102),其特征是,该保护装置包括:
弹射筒(2),该弹射筒(2)设置有两个,两个弹射筒(2)分别开口朝外设置在机体(1)的正面(101)和背面(102),所述弹射筒(2)内安装有顶板(3),顶板(3)将弹射筒(2)分隔成高压腔(4)和弹射腔(5),弹射腔(5)内安装有自抛式降落伞(6),高压腔(4)的底部开设有进气口(7);
高压气罐(8),其通过导气管(9)分别连接于两个弹射筒(2)的进气口(7),且在两个进气口(7)处分别安装有电磁阀(10);
弹射启闭门(11),其铰接于弹射筒(2)的开口,该弹射启闭门(11)的铰接轴上安装有扭力弹簧(12),弹射筒(2)上安装有用于将弹射启闭门(11)封闭在其开口上的固定部(13);
姿态传感器(14),其设于机体(1)内实时检测机体(1)的姿态变化数据,该姿态变化数据包括机体(1)的倾角和机体(1)的下落速度;
控制模块(15),接收该姿态变化数据,其中,在机体(1)的倾角和机体(1)的下落速度均大于阈值,且两种状态维持时间超过预设时间,则该控制模块(15)判断该机体(1)的倾角角度,且根据该倾角角度输出相应的控制信号至对应的电磁阀(10)和固定部(13),以控制对应弹射筒(2)内的自抛式降落伞(6)在高压气体下被压出弹射腔(5)外。
2.根据权利要求1所述的旋翼式无人机失控坠落保护装置,其特征是,所述弹射筒(2)上设有用于压紧顶板(3)上端面的限位组件(16),所述限位组件(16)包括设于弹射筒(2)侧壁上的容置腔(161)、以及两端分别连通于容置腔(161)和弹射筒(2)内部的安装腔(162),所述安装腔(162)内滑动设置有可压紧于顶板(3)上端面的压紧块(163),所述容置腔(161)内滑动设置有抵触块(164),所述抵触块(164)上设有与压紧块(163)连接以驱使压紧块(163)滑动的联动构件(17),所述容置腔(161)具有上腔(1611)和下腔(1612),所述弹射筒(2)的侧壁上开设有气道(165),所述气道(165)的一端与高压腔(4)相通且另一端与容置腔(161)的上腔(1611)相通,所述上腔(1611)中收容有复位弹簧(166),所述复位弹簧(166)的一端连接在上腔(1611)的顶壁上且另一端连接在抵触块(164)的端面上。
3.根据权利要求2所述的旋翼式无人机失控坠落保护装置,其特征是,所述联动构件(17)包括斜燕尾块(171),所述斜燕尾块(171)固接在抵触块(164)上,所述压紧块(163)上设有与斜燕尾块(171)配合的斜燕尾槽(172)。
4.根据权利要求2所述的旋翼式无人机失控坠落保护装置,其特征是,所述上腔(1611)中安装有伸缩杆(167),所述伸缩杆(167)中设有沿其轴向方向分布的通孔(168),所述伸缩杆(167)的一端连接在上腔(1611)的顶壁上且其通孔(168)与气道(165)相互连通,所述伸缩杆(167)的另一端可抵触在抵触块(164)的端面上。
5.根据权利要求2所述的旋翼式无人机失控坠落保护装置,其特征是,所述压紧块(163)与顶板(3)接触的侧壁上安装有滚珠(169),所述压紧块(163)的端面设有与顶板(3)下端面抵触以驱使压紧块(163)滑动的引导面(160)。
6.根据权利要求2所述的旋翼式无人机失控坠落保护装置,其特征是,所述顶板(3)与弹射筒(2)的筒底之间连接有弹射辅助弹簧(18)。
7.根据权利要求1所述的旋翼式无人机失控坠落保护装置,其特征是,所述固定部(13)包括连接于弹射启闭门(11)的弹性卡片(131),所述弹性卡片(131)的内壁上连接有卡脚(132),所述弹射筒(2)的侧壁上设有与卡脚(132)嵌合的卡槽(133),所述卡脚(132)内设置有磁铁(134),所述卡槽(133)内设有与控制模块(15)相连的电磁铁(135)。
8.一种旋翼式无人机失控坠落保护方法,其特征是,包括如下步骤:
S100,实时检测机体(1)的姿态变化数据,姿态变化数据包括机体(1)的倾角和机体(1)的下落速度,其中,机体(1)正面(101)朝上水平放置的倾角设定为0°;
S200,分析姿态变化数据,判断机体(1)的倾角和机体(1)的下落速度是否大于阈值,若是,则进入S300;
S300,判断机体(1)的倾角和机体(1)的下落速度这两种状态维持时间是否超过预设时间,若是,则进入S400;
S400,将机体(1)正面(101)倾角的阈值设定为±90°,在两种状态维持时间超过预设时间后判断机体(1)正面(101)倾角的角度,若机体(1)正面(101)倾角的角度在阈值范围内,则控制机体(1)正面(101)的弹射筒(2)弹出自抛式降落伞(6),反之,则控制机体(1)背面(102)的弹射筒(2)弹出自抛式降落伞(6)。
9.根据权利要求8所述的旋翼式无人机失控坠落保护装置,其特征是,在上述步骤S400中还包括如下步骤:
S410,在检测到弹射筒(2)弹出自抛式降落伞(6)后,控制模块(15)控制该无人机的旋翼(19)停止转动。
说明书
技术领域
本发明涉及无人机领域,特别涉及一种旋翼式无人机失控坠落保护装置及其保护方法。
背景技术
无人机已广泛应用于民用和军事领域,如灾区灾情监测、电视台航拍、电力巡线、气象探测、目标侦查等。小型无人机在飞行过程中,任何一个部件或环节的失常都可能造成飞机失控并坠毁,从而造成对机体本身和机载设备的损坏,由于现阶段无人机和机载遥感设备都价值不费,坠毁事故一旦发生会造成巨大的财产价值。
而无人机可分为固定翼式和旋翼式,其中固定翼式的无人机在飞行过程中与空气保持有较大的相对速度,发生坠落事故时,只要将降落伞脱出伞仓,由于空气的作用,降落伞会自动抛出和打开;而这种降落伞的打开方式并不适用于旋翼式无人机,由于旋翼式无人机在作业过程中经常处于悬停状态,此时,机身与空气之间没有相对速度,如果此时发生失控坠机事故,固定翼式的降落伞并不适用,无法对坠落的旋翼式无人机提供保护,因此,急需一种有效的失控坠落保护装置。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种旋翼式无人机失控坠落保护装置,在其发生坠落时,降落伞能有效打开,达到保护无人机的目的。
本发明的上述技术目的是通过以下技术方案得以实现的:
一种旋翼式无人机失控坠落保护装置,包括机体,所述机体具有正面和背面,该保护装置包括:
弹射筒,该弹射筒设置有两个,两个弹射筒分别开口朝外设置在机体的正面和背面,所述弹射筒内安装有顶板,顶板将弹射筒分隔成高压腔和弹射腔,弹射腔内安装有自抛式降落伞,高压腔的底部开设有进气口;
高压气罐,其通过导气管分别连接于两个弹射筒的进气口,且在两个进气口处分别安装有电磁阀;
弹射启闭门,其铰接于弹射筒的开口,该弹射启闭门的铰接轴上安装有扭力弹簧,弹射筒上安装有用于将弹射启闭门封闭在其开口上的固定部;
姿态传感器,其设于机体内实时检测机体的姿态变化数据,该姿态变化数据包括机体的倾角和机体的下落速度;
控制模块,接收该姿态变化数据,其中,在机体的倾角和机体的下落速度均大于阈值,且两种状态维持时间超过预设时间,则该控制模块判断该机体的倾角角度,且根据该倾角角度输出相应的控制信号至对应的电磁阀和固定部,以控制对应弹射筒内的自抛式降落伞在高压气体下被压出弹射腔外。
优选的,所述弹射筒上设有用于压紧顶板上端面的限位组件,所述限位组件包括设于弹射筒侧壁上的容置腔、以及两端分别连通于容置腔和弹射筒内部的安装腔,所述安装腔内滑动设置有可压紧于顶板上端面的压紧块,所述容置腔内滑动设置有抵触块,所述抵触块上设有与压紧块连接以驱使压紧块滑动的联动构件,所述容置腔具有上腔和下腔,所述弹射筒的侧壁上开设有气道,所述气道的一端与高压腔相通且另一端与容置腔的上腔相通,所述上腔中收容有复位弹簧,所述复位弹簧的一端连接在上腔的顶壁上且另一端连接在抵触块的端面上。
优选的,所述联动构件包括斜燕尾块,所述斜燕尾块固接在抵触块上,所述压紧块上设有与斜燕尾块配合的斜燕尾槽。
优选的,所述上腔中安装有伸缩杆,所述伸缩杆中设有沿其轴向方向分布的通孔,所述伸缩杆的一端连接在上腔的顶壁上且其通孔与气道相互连通,所述伸缩杆的另一端可抵触在抵触块的端面上。
优选的,所述压紧块与顶板接触的侧壁上安装有滚珠,所述压紧块的端面设有与顶板下端面抵触以驱使压紧块滑动的引导面。
优选的,所述顶板与弹射筒的筒底之间连接有弹射辅助弹簧。
优选的,所述固定部包括连接于弹射启闭门的弹性卡片,所述弹性卡片的内壁上连接有卡脚,所述弹射筒的侧壁上设有与卡脚嵌合的卡槽,所述卡脚内设置有磁铁,所述卡槽内设有与控制模块相连的电磁铁。
针对现有技术存在的不足,本发明的另一个目的在于提供一种旋翼式无人机失控坠落保护方法,在其发生坠落时,降落伞能有效打开,以进一步保护无人机。
本发明的上述技术目的是通过以下技术方案得以实现的:
一种旋翼式无人机失控坠落保护方法,其特征是,包括如下步骤:
S100,实时检测机体的姿态变化数据,姿态变化数据包括机体的倾角和机体的下落速度,其中,机体正面朝上水平放置的倾角设定为0°;
S200,分析姿态变化数据,判断机体的倾角和机体的下落速度是否大于阈值,若是,则进入S300;
S300,判断机体的倾角和机体的下落速度这两种状态维持时间是否超过预设时间,若是,则进入S400;
S400,将机体正面倾角的阈值设定为±90°,在两种状态维持时间超过预设时间后判断机体正面倾角的角度,若机体正面倾角的角度在阈值范围内,则控制机体正面的弹射筒弹出自抛式降落伞,反之,则控制机体背面的弹射筒弹出自抛式降落伞。
优选的,在上述步骤S400中还包括如下步骤:
S410,在检测到弹射筒弹出自抛式降落伞后,控制模块控制该无人机的旋翼停止转动。
综上所述,本发明对比于现有技术的有益效果为:
1、本发明利用姿态传感器实时监测无人机的飞行状态,在无人机失控坠落时,根据无人机的机体朝向,弹射出机体对应面的降落伞,以保证降落伞能顺利打开,进而减少无人机研究与实验成本,提高无人机飞行的稳定性和安全性,达到全方位保护无人机的目的;
2、本发明中的弹射筒利用高压弹出自抛式降落伞的方式,经济、节能、环保,并且通过限位组件压紧顶板,使得高压腔内积聚足够的压力后才弹出降落伞,以提高降落伞弹出的成功率,以进一步提高保护无人机的目的。
附图说明
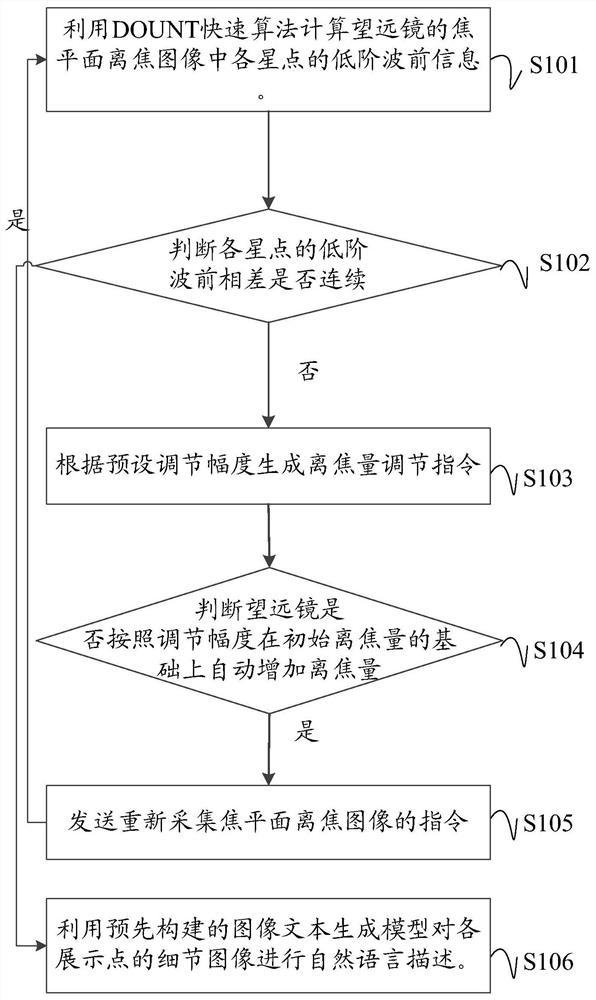
图1为无人机的结构示意图;
图2为机体的结构示意图;
图3为弹射筒的结构示意图;
图4为图3中A部的放大示意图;
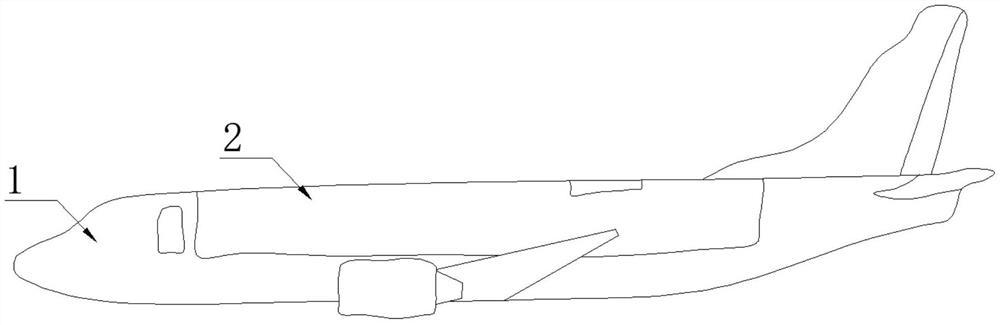
图5为无人机失控坠落保护方法的流程图。
附图标记:1、机体;101、正面;102、背面;2、弹射筒;3、顶板;4、高压腔;5、弹射腔;6、自抛式降落伞;7、进气口;8、高压气罐;801、充气口;802、出气口;9、导气管;10、电磁阀;11、弹射启闭门;12、扭力弹簧;13、固定部;131、弹性卡片;132、卡脚;133、卡槽;134、磁铁;135、电磁铁;14、姿态传感器;15、控制模块;16、限位组件;160、引导面;161、容置腔;1611、上腔;1612、下腔;162、安装腔;163、压紧块;164、抵触块;1641、长段;1642、斜段;165、气道;166、复位弹簧;167、伸缩杆;1671、第一滑杆;1672、第二滑杆;168、通孔;169、滚珠;17、联动构件;171、斜燕尾块;172、斜燕尾槽;18、弹射辅助弹簧;19、旋翼;20、单向阀;21、挡块。
具体实施方式
以下结合附图对本发明作进一步详细说明。
实施例一,结合图1和图2所示:
一种旋翼式无人机失控坠落保护装置,包括机体1以及设于机体1上的旋翼19,机体1具有正面101和背面102,该保护装置包括弹射筒2、高压气罐8、弹射启闭门11、姿态传感器14和控制模块15。
弹射筒2设置有两个,弹射筒2具有开口、侧壁、内腔、以及筒底,两个弹射筒2分别开口朝外设置在机体1的正面101和背面102;在弹射筒2内安装有顶板3,顶板3可采用橡胶材料,顶板3可沿着弹射筒2轴向滑动,由于顶板3具有一定的弹性,顶板3在弹射筒2内胀紧,使得顶板3与弹射筒2的内壁之间无缝密封连接;其中,顶板3将弹射筒2分隔成高压腔4和弹射腔5,弹射腔5内安装有自抛式降落伞6,高压腔4的底部开设有进气口7。
高压气罐8设置在机体1内部,高压气罐8具有一出气口802和一充气口801,该出气口802通过导气管9分别连接于两个弹射筒2的进气口7,且在两个进气口7处分别安装有电磁阀10,该电磁阀10受控于控制模块15实现启闭。
弹射启闭门11铰接于弹射筒2的开口,该弹射启闭门11的铰接轴上安装有扭力弹簧12,扭力弹簧12能始终提供弹射启闭门11远离弹射筒2开口一侧的扭力,相应的在弹射筒2上安装有固定部13,固定部13用于将弹射启闭门11密封盖合在弹射筒2的开口上。
姿态传感器14本实施例优选采用九轴姿态传感器14,姿态传感器14设于机体1内,姿态传感器14用于实时检测机体1的姿态变化数据,该姿态变化数据包括机体1的倾角和机体1的下落速度,在本实施例中将机体1正面101朝上水平放置的倾角设定为0°。
控制模块15接收该姿态变化数据,其中,在机体1的倾角和机体1的下落速度均大于阈值,且两种状态维持时间超过预设时间,则该控制模块15判断该机体1的倾角角度,以根据该倾角角度输出相应的控制信号至对应的电磁阀10和固定部13,以控制对应弹射筒2内的自抛式降落伞6在高压气体下被压出弹射腔5外。
结合图2和图3所示,固定部13包括连接于弹射启闭门11的弹性卡片131,弹性卡片131的内壁上连接有卡脚132,弹射筒2的侧壁上设有与卡脚132嵌合的卡槽133,卡脚132内设置有磁铁134,卡槽133内设有与控制模块15相连的电磁铁135。电磁铁135在平时状态下是不通电的,因此,在弹射腔5内放置好自抛式降落伞6后,翻折弹射启闭门11,将弹射启闭门11往弹射筒2开口一侧移动,并相应向外掰动弹性卡片131,使得弹性卡片131内壁上的卡脚132与弹射筒2的卡槽133相嵌合,完成弹射启闭门11的固定过程。
按照旋翼式无人机飞行运动的规律,通过大量实际飞行试验,得出旋翼式无人机飞行时的姿态数据中机体1倾角和机体1下落速度的阈值信息;根据旋翼式无人机角度失控阈值的确定,可以得到旋翼式无人机正常飞行时,其俯仰角和横滚角都在±40°之间,所以把机体1倾角的失控阈值设定为40°。
根据旋翼式无人机下落速度失控阈值的确定,可以得到旋翼式无人机正常飞行时,其x轴加速度和y轴加速度都在±0.5g之间,z轴加速度在0.5g~1.5g之间,所以把机体1下落速度的阈值确定为0.5g~1.5g。
在控制模块15分析该姿态变化数据,检测到该无人机失控坠落时(机体1的倾角和下落速度均大于上述的阈值),控制模块15开始计时,在两种状态维持时间超过预设时间后,本实施例预设时间可设置在1s~2s之间任何数值,本实施例不做具体限定,控制模块15进入预弹射状态,在预弹射状态,控制模块15分析该姿态变化数据得到失控时机体1正面101的倾角角度,根据机体1具有正面101和背面102的特性,把机体1正面101倾角的阈值设定为±90°,在机体1正面101的倾角角度在±90°之间,控制模块15输出控制信号至机体1正面101弹射筒2的电磁阀10和固定部13,使得电磁阀10和固定部13中的电磁铁135通电,电磁铁135通电后,使得电磁铁135具有磁性,其中,电磁铁135的正极面(负极面)与磁铁134的正极面(负极面)相对,使得电磁铁135对磁铁134产生相向力,驱使卡脚132从卡槽133中弹开,使得弹射启闭门11在扭力弹簧12的作用下将弹射筒2的开口打开;并且高压气罐8中的气体压入到高压腔4中,高压腔4中急剧涌入气体使得高压腔4内的气压升高,驱动顶板3将自抛式降落伞6从弹射筒2的开口中弹出。
在弹射筒2的开口内沿处设置有挡块21,以防止顶板3跟随降落伞从弹射筒2的开口中弹出;自抛式降落伞6上连接有伞绳,该伞绳分别连接在机体1的正面101和背面102上。
结合图2和图4所示,在弹射筒2上设有用于压紧顶板3上端面的限位组件16。
限位组件16包括设于弹射筒2侧壁上的容置腔161、以及两端分别连通于容置腔161和弹射筒2内部的安装腔162,安装腔162内滑动设置有可压紧于顶板3上端面的压紧块163,容置腔161内滑动设置有抵触块164,抵触块164上设有与压紧块163连接以驱使压紧块163滑动的联动构件17;压紧块163与顶板3接触的侧壁上安装有滚珠169,压紧块163的端面设有与顶板3下端面抵触以驱使压紧块163滑动的引导面160;顶板3与弹射筒2的筒底之间连接有弹射辅助弹簧18。
抵触块164具有长段1641和斜段1642,斜段1642靠近压紧块163一侧,联动构件17设置在抵触块164的斜段1642上,联动构件17包括斜燕尾块171,斜燕尾块171固接在抵触块164上,压紧块163上设有与斜燕尾块171配合的斜燕尾槽172。
容置腔161具有上腔1611和下腔1612,弹射筒2的侧壁上开设有气道165,气道165的一端与高压腔4相通且另一端与容置腔161的上腔1611相通,上腔1611中收容有复位弹簧166,复位弹簧166的一端连接在上腔1611的顶壁上且另一端连接在抵触块164的端面上。
上腔1611中安装有伸缩杆167,伸缩杆167中设有沿其轴向方向分布的通孔168,伸缩杆167的一端连接在上腔1611的顶壁上且其通孔168与气道165相互连通,伸缩杆167的另一端可抵触在抵触块164的端面上。伸缩杆167包括第一滑杆1671和第二滑杆1672,通孔168贯穿于第一滑杆1671和第二滑杆1672的轴向方向,第一滑杆1671的一端连接于上腔1611的顶壁且另一端穿设于第二滑杆1672,第二滑杆1672的另一端抵接在抵触块164的端面上。
安装顶板3时,将顶板3的下端面抵触在引导面160上,向顶板3施加向朝向弹射筒2筒底一侧的压力,此时,弹射辅助弹簧18被压缩,压紧块163在引导面160的作用下在安装腔162中滑动并且收容进入到安装腔162中,随着顶板3在弹射筒2中的深入,顶板3的侧壁不再对压紧块163构成阻挡,压紧块163在复位弹簧166和抵触块164的驱动下,压紧块163的下端面压紧在顶板3的上端面上,此时,顶板3安装完毕,即可将自抛式降落伞6放置在弹射腔5中,盖合上弹射启闭门11通过固定部13封闭住弹射筒2的开口。
该无人机失控后,控制模块15输出控制信号至固定部13,固定部13中的电磁铁135通电以打开弹射启闭门11,控制模块15根据机体1正面101的倾角以输出控制信号至相应的电磁阀10,电磁阀10开启,高压气罐8中的气体被充入到高压腔4中,由于压紧块163压紧在顶板3的上端面,从而顶板3不会被气体顶出,使得气体能在高压腔4中积聚一定的气体压力;此时,高压气体通过气道165、伸缩杆167中的通孔168作用在抵触块164的端面上,以驱使抵触块164向下滑动,从而压紧块163在联动构件17的作用下滑动,使得压紧块163不再压紧在顶板3的上端面上;此时,失去压紧块163阻挡作用的顶板3经过高压腔4中气体的冲击,将弹射腔5中的自抛式降落伞6快速的顶出弹射筒2,完成自抛式降落伞6的弹射过程。
由于压紧块163与顶板3接触的侧壁上滚珠169的设置,使得压紧块163与顶板3上端面滑动摩擦转变成滚动摩擦,使得压紧块163与顶板3之间的摩擦力更小,且两者之间的摩擦力小于高压气体对于抵触块164端面的推动力,以保证压紧块163能顺利的从顶板3的上端面松脱。
即,顶板3在高压腔4中高压气体的作用下产生向上的推力F;经过滚珠169的设置,使得压紧块163与顶板3之间的摩擦力为uF,u为摩擦因素,u<1;而抵触块164向下滑动的驱动力等于推力F,因而,压紧块163不会在推力F的作用下被卡嵌在顶板3上。
其中,在高压气罐8的充气口801上连接有单向阀20,在高压气罐8一次使用完毕后,可通过气枪对准单向阀20对高压气罐8进行充气,以满足该保护装置的多次重复使用。
实施例二,如图5所示:
一种旋翼式无人机失控坠落保护方法,包括如下步骤:
S100,实时检测机体1的姿态变化数据,姿态变化数据包括机体1的倾角和机体1的下落速度,其中,机体1正面101朝上水平放置的倾角设定为0°;
S200,分析姿态变化数据,判断机体1的倾角和机体1的下落速度是否大于阈值,若是,则进入S300;
S300,判断机体1的倾角和机体1的下落速度这两种状态维持时间是否超过预设时间,若是,则进入S400;
S400,将机体1正面101倾角的阈值设定为±90°,在两种状态维持时间超过预设时间后判断机体1正面101倾角的角度,若机体1正面101倾角的角度在阈值范围内,则控制机体1正面101的弹射筒2弹出自抛式降落伞6,反之,则控制机体1背面102的弹射筒2弹出自抛式降落伞6。
在上述步骤S400中还包括如下步骤:
S410,在检测到弹射筒2弹出自抛式降落伞6后,控制模块15控制该无人机的旋翼19停止转动,以防止在无人机的旋翼19隔断自抛式降落伞6的伞绳,或防止伞绳缠绕在无人机的旋翼19上。
以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
旋翼式无人机失控坠落保护装置及其保护方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0