









专利摘要
公开一种基于路径和RSSI的移动机器人定位充电基座的智能控制方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器和与处理器连接的第二WIFI模块,以及设置在处理器中的充电基座定向控制方法,包括7个步骤:1.设置链表L0和L1;2.第二WIFI模块接入第一WIFI模块的网络,实时计算坐标、方向和检测无线信号强度;3.移动机器人开始工作,用当前数据初始化L0;4.障碍物检测;移动距离计算;任务完成及电量判断;5.将实时数据存入链表L0;6.计算无线信号强度值R的梯度,如果接近于零,则将数据存入L1;7.计算充电基座的坐标和方向。
权利要求
1.基于路径和RSSI的移动机器人定位充电基座的智能控制方法,所述的移动机器人包括驱动轮和与所述的驱动轮连接的驱动电机以及设置在所述的移动机器人前端的充电电极公端,所述的移动机器人内部设置主控电子装置,所述的主控电子装置包括进行集中控制的处理器,与所述的处理器连接的电机驱动电路,所述的电机驱动电路与所述的驱动电机连接,与所述的处理器连接的障碍物检测电路,用于进行避障和路径规划,与所述的处理器连接的惯性导航系统,用于计算所述的移动机器人的坐标(x,y)和方向θ,还包括与所述的处理器连接的充电电路,所述的充电电路与所述的充电电极公端连接,所述的充电电路输出连接充电电池,所述充电电池输出连接第二电源电路,所述的第二电源电路为后续电路提供电源;所述的充电基座包括充电电极母端、电源插孔,以及充电控制电子装置,所述的充电控制电子装置设置了进行集中控制的控制器,与所述电源插孔连接的第一电源电路和滤波电路,与所述的滤波电路连接的开关管,所述的开关管由所述的控制器控制,输出连接电流检测电路,所述的电流检测电路连接所述的充电电极母端,所述的电流检测电路将电流信号转换成电压信号给所述的控制器,其特征在于:所述的充电控制电子装置,设置与所述的控制器连接的第一WIFI模块,所述的第一WIFI模块设置为AP模式,所述的主控电子装置设置与所述的处理器连接的第二WIFI模块,所述的第二WIFI模块设置为STA模式,所述的处理器可获取所述的第二WIFI模块接收到的无线信号强度值RSSI,记为R,以及设置在所述的处理器中的充电基座定位控制方法,所述的充电基座定位控制方法包括以下步骤:
(1) 设置循环链表L
(2) 所述的处理器控制所述的第二WIFI模块接入所述的第一WIFI模块的网络,所述的处理器实时获取所述的第二WIFI模块接收到的无线信号强度值R;所述的惯性导航系统实时计算所述的移动机器人的坐标(x,y)和方向θ;
(3) 所述的移动机器人直线前进,同时初始化链表L
(4) 当所述的移动机器人遇到障碍物或者需要转向时,返回步骤3;当任务完成或者电量不足时,执行步骤7;如果移动距离d=
(5) 储存当前数据:sp++,当sp>5, 令sp=0;a
(6) 计算无线信号强度梯度值ΔR=|R
(7) 采用数据处理算法,计算所述的充电基座的坐标(x
x
y
所以所述的充电基座的方向β
说明书
技术领域
本发明涉及一种基于无线信号RSSI的移动机器人定位充电基座的智能控制方法,属于移动机器人领域。
背景技术
移动机器人已经开始应用在我们的生活中,比如吸尘机器人和割草机器人,机器人的应用一定程度上减轻了日常的劳动负担,是未来技术发展的趋势。
目前,移动机器人技术的发展还不是很完善,比如吸尘机器人和割草机器人,在工作结束或者电池耗尽的时候,需要寻找充电基座进行充电。目前常用的方式是沿工作区域的边界进行搜寻,比如吸尘机器人可以沿着墙边搜寻充电基座,而充电基座是靠墙设置的;割草机器人是工作在草坪上,而草坪的周围铺设了交流电缆,充电基座设置在电缆上,所以割草机器人沿着电缆也可以找到充电基座。这种方式在环境复杂,或者面积较大的情况下,平均状况下需要花很长时间才能回到充电基座,并且很可能出现这种情况,充电基座近在咫尺,移动机器人还要从反方向去搜寻。另外,也有采用随机搜集的方式,比如一些吸尘机器人,这种方式效率低下,经常失败。
随着技术的发展,目前移动机器人开始装配二维甚至三维激光雷达用于环境检测和地图建立,但是这种方式成本非常高,传感器本身的价格已经远远超过目前移动机器人的成本。也有采用图像传感器进行环境检测与地图建立的,这种方式对硬件计算能力要求高,并且对环境光照条件要求苛刻。而无线wifi网络已经普及到每个家庭及办公环境,其硬件成本非常低,开发资料也很丰富,基于无线wifi网络信号的强弱来进行移动机器人的位姿计算成为一个发展方向。
发明内容
本发明的目的是为了克服现有技术中的不足之处,基于无线信号的强度信息,在移动机器人移动过程中进行数据采集,并计算充电基座的坐标和方向,缩短了移动机器人寻找充电基座的时间,提高了效率。
本发明解决其技术问题所采用的技术方案是:
基于路径和RSSI的移动机器人定位充电基座的智能控制方法,所述的移动机器人包括驱动轮和与所述的驱动轮连接的驱动电机以及设置在所述的移动机器人前端的充电电极公端,所述的移动机器人内部设置主控电子装置,所述的主控电子装置包括进行集中控制的处理器,与所述的处理器连接的电机驱动电路,所述的电机驱动电路与所述的驱动电机连接,与所述的处理器连接的障碍物检测电路,用于进行避障和路径规划,与所述的处理器连接的标志信号接收装置,用于接收充电基座发出的特征信号,与所述的处理器连接的惯性导航系统,用于计算所述的移动机器人的坐标(x,y)和方向θ,还包括与所述的处理器连接的充电电路,所述的充电电路与所述的充电电极公端连接,所述的充电电路输出连接充电电池,所述充电电池输出连接第二电源电路,所述的第二电源电路为后续电路提供电源;所述的充电基座包括充电电极母端、电源插孔,以及充电控制电子装置,所述的充电控制电子装置设置了进行集中控制的控制器,与所述电源插孔连接的第一电源电路和滤波电路,与所述的滤波电路连接的开关管,所述的开关管由所述的控制器控制,输出连接电流检测电路,所述的电流检测电路连接所述的充电电极母端,所述的电流检测电路将电流信号转换成电压信号给所述的控制器,还包括与所述的控制器连接的标志信号发射装置,用于发射特征信号,所述的充电控制电子装置,设置与所述的控制器连接的第一WIFI模块,所述的第一WIFI模块设置为AP模式,所述的主控电子装置设置与所述的处理器连接的第二WIFI模块,所述的第二WIFI模块设置为STA模式,所述的处理器可获取所述的第二WIFI模块接收到的无线信号强度值RSSI,记为R,以及设置在所述的处理器中的充电基座定位控制方法,所述的充电基座定位控制方法包括以下步骤:
(1)设置循环链表L0={a0,a1,a2,a3,a4,a5},其中ai={xi,yi,θi,Ri},i=0,1,2...5,设置表头指针sp, 表尾指针ep;设置链表L1={b0,b1},其中bj={xj,yj,θj},其中j=0,1,并初始化L1=0;
(2)所述的处理器控制所述的第二WIFI模块接入所述的第一WIFI模块的网络,所述的处理器实时获取所述的第二WIFI模块接收到的无线信号强度值R;所述的惯性导航系统实时计算所述的移动机器人的坐标(x,y)和方向θ;
(3)所述的移动机器人直线前进,同时初始化链表L0:a0.x=x,a0.y=y,a0.θ=θ,a0.R=R,sp=ep=0,其中数据(x,y),θ,R为当前位置的坐标,方向和无线信号强度值;
(4)当所述的移动机器人遇到障碍物或者需要转向时,返回步骤3;当任务完成或者电量不足时,执行步骤7;如果移动距离d= >10cm时,执行步骤5;否则,继续执行步骤4;
(5)储存当前数据:sp++,当sp>5, 令sp=0;asp.x=x,asp.y=y,asp.θ=θ,asp.R=R;当sp>ep时,如果sp-ep=5,则执行步骤6,否则继续执行步骤4;当sp≤ep,如果ep-sp=1时,则执行步骤6,否则继续执行步骤4;
(6)计算无线信号强度梯度值ΔR=|Rsp-Rep|,同时ep++,如果ep>5,则ep=0;当ΔR<δ时,其中δ设置为接近于零的阈值,记录数据b1=b0,b0.x=(asp.x+aep.x)/2,b0.y=(asp.y+aep.y)/2,b0.θ=(asp.θ+aep.θ)/2+π/2,返回步骤4;
(7)采用数据处理算法,计算所述的充电基座的坐标(x0,y0)和方向β0。
步骤7中,所述的数据处理算法设置为:
根据链表L1的数据,计算所述的充电基座的坐标:
x0= ;
y0= ;
所以所述的充电基座的方向β0=arctan(y0-y)/(x0-x)。
实施本发明的积极效果是:1、无线信号覆盖范围广,在移动机器人行走过程中进行数据采集,需要的时候可以迅速计算充电基座的坐标和方向;2、不需要环境设置及改造,成本低。
附图说明
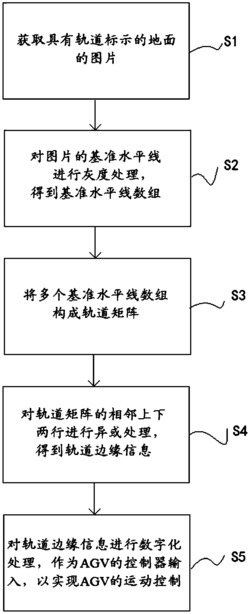
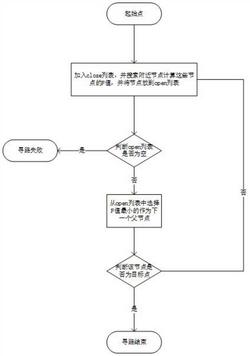
图1是充电基座定向过程示意图;
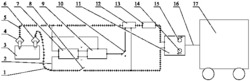
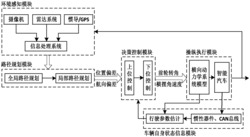
图2是主控电子装置的原理框图;
图3是充电控制电子装置的原理框图。
具体实施方式
现结合附图对本发明作进一步说明:
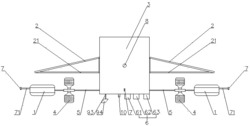
参照图1-3,基于路径和RSSI的移动机器人定位充电基座的智能控制方法,所述的移动机器人21包括驱动轮和与所述的驱动轮连接的驱动电机11以及设置在所述的移动机器人21前端的充电电极公端6。基于所述的驱动轮,所述的移动机器人21可以实现自由移动,可以设置为两个驱动轮和一个支撑轮;所述的充电电极公端6设置为两个分开的铜质电极,与外部电源连接时进行充电。
所述的移动机器人21内部设置主控电子装置,所述的主控电子装置包括进行集中控制的处理器1,所述的处理器1可采用低功耗微处理器,具体可采用TI公司的MSP430,或者普通处理器,比如ST公司的32位ARM处理器STM32F103C8T6;与所述的处理器1连接的电机驱动电路7,所述的电机驱动电路7与所述的驱动电机11连接,在所述的处理器1的控制下,所述的电机驱动电路7带动所述的驱动电机11,所述的驱动电机11带动所述的驱动轮,实现所述的移动机器人21的自由移动;与所述的处理器1连接的障碍物检测电路8,用于进行避障和路径规划,可以采用超声波或者红外传感器或者两种传感器的组合;与所述的处理器1连接的标志信号接收装置9,用于接收充电基座20发出的特征信号;与所述的处理器1连接的惯性导航系统10,设置为安装在所述的驱动电机11上的编码器,用于计算所述的移动机器人21的坐标(x,y)和方向θ,由于计算误差,机械间隙及地面打滑,所述的惯性导航系统10具有累计误差,但是在一段时间内,误差较小,具有使用价值;还包括与所述的处理器1连接的充电电路5,所述的充电电路5与所述的充电电极公端6连接,所述的充电电路5输出连接所述的充电电池4,所述充电电池4输出连接第二电源电路2,所述的第二电源电路2为后续电路提供电源。
所述的充电基座20包括充电电极母端17、电源插孔,以及充电控制电子装置。所述的电源插孔可连接外部电源适配器,为所述的充电基座20各个组成部分提供电源;所述的充电电极母端17设置为两个分开的铜质电极,具有弹性,与所述的充电电极公端6对应,正极对正极,负极对负极,高度相同。
所述的充电控制电子装置设置了进行集中控制的控制器12,因为功能较单一,可采用MICROCHIP的PIC16F1503单片机;与所述的电源插孔连接的第一电源电路13和滤波电路14,与所述的滤波电路14连接的开关管15,所述的开关管15由所述的控制器12控制,输出连接电流检测电路16,所述的电流检测电路16连接所述的充电电极母端17,所述的电流检测电路16将电流信号转换成电压信号给所述的控制器12,所述的控制器12可控制输出电流的大小,并且防止所述的充电电极母端17短路;还包括与所述的控制器12连接的标志信号发射装置18,用于发射特征信号。
所述的标志信号发射装置18设置为红外信号发射装置,所述的标志信号接收装置9设置为红外信号接收装置。红外信号指向性好,并且便于设置其发射角度和范围。所述的标志信号接收装置9设置在所述移动机器人21的前面,所述的标志信号发射装置18设置在所述的充电基座的前端,所述的标志信号接收装置9和标志信号发射装置18设置同样的高度。
所述的充电控制电子装置,设置与所述的控制器12连接的第一WIFI模块19,所述的第一WIFI模块19设置为AP模式,即无线接入点,是一个无线网络的中心节点;所述的主控电子装置设置与所述的处理器1连接的第二WIFI模块3,所述的第二WIFI模块3设置为STA模式,即无线站点,是一个无线网络的终端,所述的处理器1可获取所述的第二WIFI模块3接收到的无线信号强度值RSSI,记为R。所述的第一WIFI模块19和第二WIFI模块3可设置为IOT芯片ESP8266,具有价格低,变成简便的优点。
所述的处理器1设置充电基座定向控制方法,所述的充电基座定向控制方法包括以下步骤:
(1)设置循环链表L0={a0,a1,a2,a3,a4,a5},其中ai={xi,yi,θi,Ri},i=0,1,2...5,设置表头指针sp, 表尾指针ep;设置链表L1={b0,b1},其中bj={xj,yj,θj},其中j=0,1,并初始化L1=0;
链表L0用于存储行走路径上等间距位置上的坐标、方向及无线信号强度数据;链表L1存储无线信号强度梯度接近为零的位置的坐标和方向。
(2)所述的处理器1控制所述的第二WIFI模块3接入所述的第一WIFI模块19的网络,所述的处理器1实时获取所述的第二WIFI模块3接收到的无线信号强度值R;所述的惯性导航系统10实时计算所述的移动机器人21的坐标(x,y)和方向θ;
所述的处理器1以网络名称和密码作为参数,发送AT+CWJAP指令给所述的第二WIFI模块3,就可以接入所述的第一WIFI模块19的网络。
(3)所述的移动机器人21直线前进,同时初始化链表L0:a0.x=x,a0.y=y,a0.θ=θ,a0.R=R,sp=ep=0,其中数据(x,y),θ,R为当前位置的坐标,方向和无线信号强度值;
(4)当所述的移动机器人21遇到障碍物或者需要转向时,返回步骤3;当任务完成或者电量不足时,执行步骤7;如果移动距离d= >10cm时,执行步骤5;否则,继续执行步骤4;
在步骤4中,所述的移动机器人21需要根据情况进行处理方法的选择:如果遇到障碍物或者需要转向时,即从一个方向的直线运动进入另一个方向的直线运动,需要返回步骤3,重新进行链表L0的初始化;当任务完成或者电量不足时,需要进入步骤7,计算所述的充电基座20的坐标和方向;而当移动距离d>10cm时,则需要进入步骤5,进行数据存储;如果没有出现上述情况,则继续执行本步骤。
(5)储存当前数据:sp++,当sp>5, 令sp=0,asp.x=x,asp.y=y,asp.θ=θ,asp.R=R;当sp>ep时,如果sp-ep=5,则执行步骤6,否则继续执行步骤4;当sp≤ep,如果ep-sp=1时,则执行步骤6,否则继续执行步骤4;
在步骤5中,首先表头指针指向下一个节点,然后进行数据存储;当表头指针sp与表尾指针ep相差5时,即两个数据的位置距离达到50cm时,进入步骤6进行无线信号强度梯度值计算,否则返回步骤4,继续工作。
(6)计算无线信号强度梯度值ΔR=|Rsp-Rep|,同时ep++,如果ep>5,则ep=0;当ΔR<δ时,其中δ设置为接近于零的阈值,记录数据b1=b0,b0.x=(asp.x+aep.x)/2,b0.y=(asp.y+aep.y)/2,b0.θ=(asp.θ+aep.θ)/2+π/2,返回步骤4;
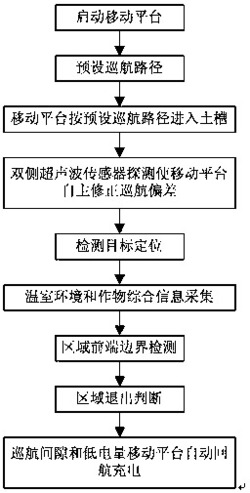
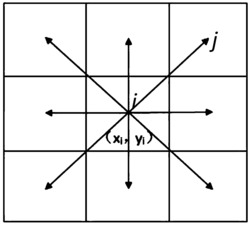
计算表头和表尾两个位置的无线信号强度梯度值ΔR,并且将表尾指针ep指向下一个节点。参照附图1,在无线网络覆盖范围内,信号是以所述的第一WIFI模块19为中心,向四周传播的。在圆周的切线方向上,具有无线信号强度梯度值最小的特性。因此,如果梯度值ΔR接近于零,表明行走路径在该处的垂线经过所述的第一WIFI模块19,所以记录该位置的坐标和方向数据。
(7)采用数据处理算法,计算所述的充电基座的坐标(x0,y0)和方向β0。
步骤7中,所述的数据处理算法设置为:
根据链表L1的数据,计算所述的充电基座20的坐标:
x0= ;
y0= ;
所以所述的充电基座的方向β0=arctan(y0-y)/(x0-x)。
链表L1的两个数据b0和b1代表两条经过所述的第一WIFI模块19的直线,建立直线方程:y-b0.y=(x-b0.x)·tanb0.θ,y-b1.y=(x-b1.x)·tanb1.θ,联立方程可计算获得所述的充电基座20的坐标(x0,y0),以及当前位置到所述的充电基座20的方向β0。
综上所述,所述的移动机器人21在工作过程中进行数据的检测与记录,当结束工作或者电量不足时,可直接计算所述的充电基座20的坐标和方向,然后直接寻找所述的充电基座20的特征信号进行对接充电,因此该方案可大大缩小的充电基座20搜寻范围,大大提高回归充电效率。
基于路径和RSSI的移动机器人定位充电基座的智能控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0