










专利摘要
本发明公开一种基于无线信号强度的割草机器人遍历路径规划方法,割草机器人包括行走轮和与行走轮连接的行走电机,割草机构和与割草机构连接的割草电机,设置在割草机器人前端的充电电极公端以及主控电子装置设,充电基座包括充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第二WIFI模块,主控电子装置设置处理器和与处理器连接的第一WIFI模块,以及设置在处理器中的遍历路径规划方法,遍历路径规划方法包括八个步骤:割草机器人在边界范围内,沿无线信号强度等值线向左运动,到边界以后再移动一个车身宽度的距离,再沿无线信号强度等值线向右运动,循环执行;当遇到障碍物时,进行绕障;当无线信号强度值变大时,结束遍历路径规划。
权利要求
1.基于无线信号强度的割草机器人遍历路径规划方法,所述的割草机器人包括行走轮和与所述的行走轮连接的行走电机,割草机构和与所述的割草机构连接的割草电机,以及设置在所述的割草机器人前端的充电电极公端,所述的割草机器人内部设置主控电子装置,所述的主控电子装置包括进行集中控制的处理器,与所述的处理器连接的行走电机驱动电路,所述的行走电机驱动电路与所述的行走电机连接,与所述的处理器连接的割草电机驱动电路,所述的割草电机驱动电路与所述的割草电机连接,与所述的处理器连接的障碍物检测电路,用于进行避障和路径规划,与所述的处理器连接的惯性导航系统,用于计算所述的割草机器人的位置(x,y)和方向θ,与所述的处理器连接的边界检测电路,用于检测草地的边界,还包括与所述的处理器连接的充电电路,所述的充电电路与所述的充电电极公端连接,所述的充电电路输出连接充电电池,所述充电电池输出连接第一电源电路,所述的第一电源电路为后续电路提供电源;充电基座包括充电电极母端、电源插孔,以及充电控制电子装置,所述的充电控制电子装置设置了进行集中控制的控制器,与所述的电源插孔连接的第二电源电路和滤波电路,与所述的滤波电路连接的开关管,所述的开关管由所述的控制器控制,输出连接电流检测电路,所述的电流检测电路连接所述的充电电极母端,所述的电流检测电路将电流信号转换成电压信号给所述的控制器,所述的充电控制电子装置,还设置与所述的控制器连接的边界信号发生电路,与所述的控制器连接的第二WIFI模块,所述的第二WIFI模块设置为AP模式,所述的主控电子装置设置与所述的处理器连接的第一WIFI模块,所述的第一WIFI模块设置为STA模式,所述的处理器可获取所述的第一WIFI模块接收到的无线信号强度值RSSI,记为R,其在于特征是:所述的处理器设置遍历路径规划方法,所述的遍历路径规划方法包括以下步骤:
(1) 所述的处理器内部设置数组A={A(0),A(1)},其中A(i)=R
(2) 所述的割草机器人向左旋转并沿着墙边行走,采用中心距计算算法,计算所述的割草机器人距离所述的充电基座的行走距离d,当行走距离d>W时,则存储当前无线信号强度值A[0]=R,进入步骤3,其中,W为所述的割草机器人的车身宽度;如果无线信号强度值R>A[0],则进入步骤8;
(3) 所述的割草机器人进入向左循迹过程,循迹路径为无线信号强度等值线,即无线信号强度为A[0]的路径;当所述的割草机器人遇到障碍物时,存储无线信号强度值A[1]=R,以左侧沿着障碍物行走,当|R-A[1]|>δ后,进入步骤4,其中δ设置为接近于零的阈值;当所述的割草机器人通过所述的边界检测电路检测到边界,则进入步骤5;
(4) 所述的割草机器人以左侧沿着障碍物行走;当|R-A[1]|<δ,返回步骤3;
(5) 所述的割草机器人向右旋转并以右侧沿着墙边行走,采用中心距计算算法,计算所述的割草机器人距离所述的充电基座的行走距离d,当行走距离d>W时,则存储当前无线信号强度值A[0]=R,进入步骤6;如果无线信号强度值R>A[0],则进入步骤8;
(6)所述的割草机器人进入向右循迹过程,循迹路径为无线信号强度等值线,即无线信号强度为A[0]的路径;当所述的割草机器人遇到障碍物时,存储无线信号强度值A[1]=R,以左侧沿着障碍物行走,当|R-A[1]|>δ后,进入步骤7;当所述的割草机器人通过所述的边界检测电路检测到边界,则进入步骤2;
(7) 所述的割草机器人以左侧沿着障碍物行走;当|R-A[1]|<δ,返回步骤6;
(8) 结束遍历路径规划。
2.根据权利要求1所述的基于无线信号强度的割草机器人遍历路径规划方法,其特征是:所述的中心距计算算法设置为:
行走距离d=10^[(P-R)/(10×n)]-10^[(P-A[0])/(10×n)],其中,P为距离所述的第二WIFI模块一米的位置测得的无线信号强度值RSSI,n为环境参数,对于家庭环境设置为2。
3.根据权利要求1所述的基于无线信号强度的割草机器人遍历路径规划方法,其特征是:所述的向左循迹过程设置为:当R>A[0]+δ,所述的割草机器人向左旋转,直到A[0]-δ<R<A[0]+δ;当R<A[0]+δ,向右旋转,直到A[0]-δ<R<A[0]+δ;保持直线前进。
4.根据权利要求1所述的基于无线信号强度的割草机器人遍历路径规划方法,其特征是:所述的向右循迹过程设置为:当R>A[0]+δ,所述的割草机器人向右旋转,直到A[0]-δ<R<A[0]+δ;当R<A[0]+δ,向左旋转,直到A[0]-δ<R<A[0]+δ;保持直线前进。
说明书
技术领域
本发明涉及一种基于无线信号强度的割草机器人遍历路径规划方法,属于割草机器人领域。
背景技术
移动机器人已经开始应用在我们的生活中,比如吸尘机器人和割草机器人,机器人的使用在一定程度上减轻了日常的劳动负担,是未来技术发展的趋势。
而割草机器人工作在室外,环境开阔,并且光照条件处在不断的变化中,环境检测的传感器受到很大的限制,比如视觉传感器会受到光照影响,导致失效;激光雷达是基于测距原理进行环境检测及环境建模,但是割草机器人的工作环境可能非常开阔,激光雷达检测结果已经没有意义。目前,割草机器人采用随机路径,在工作环境内随意行走,工作效率很低。而无线wifi网络已经普及到每个家庭及办公环境,其硬件成本非常低,开发资料也很丰富,基于无线wifi网络信号的强度信息来进行割草机器人的路径规划成为一个发展方向。
发明内容
本发明的目的是为了克服现有技术中的不足之处,依据大范围无线信号的强度信息来进行遍历路径规划,在不增加硬件成本的前提下,提高工作效率。
本发明解决其技术问题所采用的技术方案是:
基于无线信号强度的割草机器人遍历路径规划方法,所述的割草机器人包括行走轮和与所述的行走轮连接的行走电机,割草机构和与所述的割草机构连接的割草电机,以及设置在所述的割草机器人前端的充电电极公端,所述的割草机器人内部设置主控电子装置,所述的主控电子装置包括进行集中控制的处理器,与所述的处理器连接的行走电机驱动电路,所述的行走电机驱动电路与所述的行走电机连接,与所述的处理器连接的割草电机驱动电路,所述的割草电机驱动电路与所述的割草电机连接,与所述的处理器连接的障碍物检测电路,用于进行避障和路径规划,与所述的处理器连接的惯性导航系统,用于计算所述的割草机器人的位置(x,y)和方向θ,与所述的处理器连接的边界检测电路,用于检测草地的边界,还包括与所述的处理器连接的充电电路,所述的充电电路与所述的充电电极公端连接,所述的充电电路输出连接充电电池,所述充电电池输出连接第一电源电路,所述的第一电源电路为后续电路提供电源;充电基座包括充电电极母端、电源插孔,以及充电控制电子装置,所述的充电控制电子装置设置了进行集中控制的控制器,与所述的电源插孔连接的第二电源电路和滤波电路,与所述的滤波电路连接的开关管,所述的开关管由所述的控制器控制,输出连接电流检测电路,所述的电流检测电路连接所述的充电电极母端,所述的电流检测电路将电流信号转换成电压信号给所述的控制器,所述的充电控制电子装置,还设置与所述的控制器连接的边界信号发生电路,与所述的控制器连接的第二WIFI模块,所述的第二WIFI模块设置为AP模式,所述的主控电子装置设置与所述的处理器连接的第一WIFI模块,所述的第一WIFI模块设置为STA模式,所述的处理器可获取所述的第一WIFI模块接收到的无线信号强度值RSSI,记为R,所述的处理器设置遍历路径规划方法,所述的遍历路径规划方法包括以下步骤:
(1) 所述的处理器内部设置数组A={A(0),A(1)},其中A(i)=Ri,i=0,1,其中,Ri表示所述的割草机器人存储的无线信号强度值;所述的割草机器人离开所述的充电基座,存储当前无线信号强度值A[0]=R;
(2) 所述的割草机器人向左旋转并沿着墙边行走,采用中心距计算算法,计算所述的割草机器人距离所述的充电基座的行走距离d,当行走距离d>W时,则存储当前无线信号强度值A[0]=R,进入步骤3,其中,W为所述的割草机器人的车身宽度;如果无线信号强度值R>A[0],则进入步骤8;
(3) 所述的割草机器人进入向左循迹过程,循迹路径为无线信号强度等值线,即无线信号强度为A[0]的路径;当所述的割草机器人遇到障碍物时,存储无线信号强度值A[1]=R,以左侧沿着障碍物行走,当|R-A[1]|>δ后,进入步骤4,其中δ设置为接近于零的阈值;当所述的割草机器人通过所述的边界检测电路检测到边界,则进入步骤5;
(4) 所述的割草机器人以左侧沿着障碍物行走;当|R-A[1]|<δ,返回步骤3;
(5) 所述的割草机器人向右旋转并以右侧沿着墙边行走,采用中心距计算算法,计算所述的割草机器人距离所述的充电基座的行走距离d,当行走距离d>W时,则存储当前无线信号强度值A[0]=R,进入步骤6;如果无线信号强度值R>A[0],则进入步骤8;
(6)所述的割草机器人进入向右循迹过程,循迹路径为无线信号强度等值线,即无线信号强度为A[0]的路径;当所述的割草机器人遇到障碍物时,存储无线信号强度值A[1]=R,以左侧沿着障碍物行走,当|R-A[1]|>δ后,进入步骤7;当所述的割草机器人通过所述的边界检测电路检测到边界,则进入步骤2;
(7) 所述的割草机器人以左侧沿着障碍物行走;当|R-A[1]|<δ,返回步骤6;
(8) 结束遍历路径规划。
所述的中心距计算算法设置为:
行走距离d=10^[(P-R)/(10×n)]-10^[(P-A[0])/(10×n)],其中,P为距离所述的第二WIFI模块一米的位置测得的无线信号强度值RSSI,n为环境参数,对于家庭环境设置为2。
所述的向左循迹过程设置为:当R>A[0]+δ,所述的割草机器人向左旋转,直到A[0]-δ<R<A[0]+δ;当R<A[0]+δ,向右旋转,直到A[0]-δ<R<A[0]+δ;保持直线前进。
所述的向右循迹过程设置为:当R>A[0]+δ,所述的割草机器人向右旋转,直到A[0]-δ<R<A[0]+δ;当R<A[0]+δ,向左旋转,直到A[0]-δ<R<A[0]+δ;保持直线前进。
实施本发明的积极效果是:1、无线信号覆盖范围广,没有累计误差,可以用于遍历路径规划,提高工作效率;2、不需要环境设置及改造,成本低。
附图说明
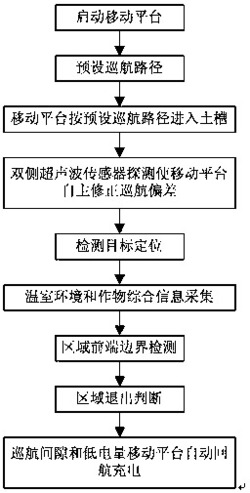
图1是主控电子装置的原理框图;
图2是充电控制电子装置的原理框图;
图3是无线信号覆盖示意图;
图4是遍历路径规划示意图。
具体实施方式
现结合附图对本发明作进一步说明:
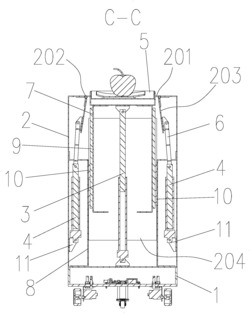
参照图1-4,基于无线信号强度的割草机器人遍历路径规划方法,所述的割草机器人23包括行走轮和与所述的行走轮连接的行走电机13,割草机构和与所述的割草机构连接的割草电机11,以及设置在所述的割草机器人23前端的充电电极公端6。基于所述的行走轮,所述的割草机器人23可以实现自由移动,可以设置为两个行走轮和一个支撑轮;所述的充电电极公端6设置为两个分开的铜质电极,与外部电源连接时进行充电。
所述的割草机器人23内部设置主控电子装置,所述的主控电子装置包括进行集中控制的处理器1,所述的处理器1可采用低功耗微处理器,具体可采用TI公司的MSP430,或者普通处理器,比如ST公司的32位ARM处理器STM32F103C8T6;与所述的处理器1连接的行走电机驱动电路12,所述的行走电机驱动电路12与所述的行走电机13连接,在所述的处理器1的控制下,所述的行走电机驱动电路12带动所述的行走电机13,所述的行走电机13带动所述的行走轮,实现所述的割草机器人23的自由移动;与所述的处理器1连接的割草电机驱动电路10,所述的割草电机驱动电路10与所述的割草电机11连接,所述的割草电机11与所述的割草机构连接,所述的割草机构可以设置为刀片,也可以设置为打草绳;与所述的处理器1连接的障碍物检测电路8,用于进行避障和路径规划,可以采用超声波或者红外传感器或者两种传感器的组合;与所述的处理器1连接的惯性导航系统9,设置为安装在所述的行走电机13上的编码器,用于计算所述的割草机器人23的位置(x,y)和方向θ;与所述的处理器1连接的边界检测电路7,用于检测草地的边界,边界上设置封闭的、通直流电的电缆,因此电缆内部与外部产生方向相反的磁场,所述的边界检测电路7设置两个霍尔传感器,检测磁场方向,可判断所述的割草机器人23在边界外、边界内或者边界上;还包括与所述的处理器1连接的充电电路5,所述的充电电路5与所述的充电电极公端6连接,所述的充电电路5输出连接所述的充电电池4,所述充电电池4输出连接第二电源电路2,所述的第二电源电路2为后续电路提供电源。
充电基座22包括充电电极母端20、电源插孔,以及充电控制电子装置。所述的电源插孔可连接外部电源适配器,为所述的充电基座22各个组成部分提供电源;所述的充电电极母端20设置为两个分开的铜质电极,具有弹性,与所述的充电电极公端6对应,正极对正极,负极对负极,高度相同。
所述的充电控制电子装置设置了进行集中控制的控制器14,因为功能较单一,可采用MICROCHIP的PIC16F1503单片机;与所述电源插孔连接的第一电源电路2和滤波电路16,与所述的滤波电路16连接的开关管18,所述的开关管18由所述的控制器14控制,输出连接电流检测电路19,所述的电流检测电路19连接所述的充电电极母端20,所述的电流检测电路19将电流信号转换成电压信号给所述的控制器14,所述的控制器14可控制输出电流的大小,并且防止所述的充电电极母端20短路。还设置与所述的控制器14连接的边界信号发生电路21,所述的边界信号发生电路21与草地边界上的电缆连接,可输出直流信号,用于产生所述的边界检测电路7可识别的磁场。
所述的充电控制电子装置,设置与所述的控制器14连接的第二WIFI模块15,所述的第二WIFI模块15设置为AP模式,即无线接入点,是一个无线网络的中心节点;所述的主控电子装置设置与所述的处理器1连接的第一WIFI模块3,所述的第一WIFI模块3设置为STA模式,即无线站点,是一个无线网络的终端,所述的处理器1可获取所述的第一WIFI模块3接收到的无线信号强度值RSSI,记为R。所述的第一WIFI模块3和第二WIFI模块15可设置为IOT芯片ESP8266,具有价格低,编程简便的优点。
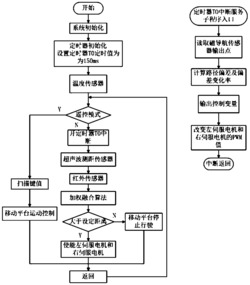
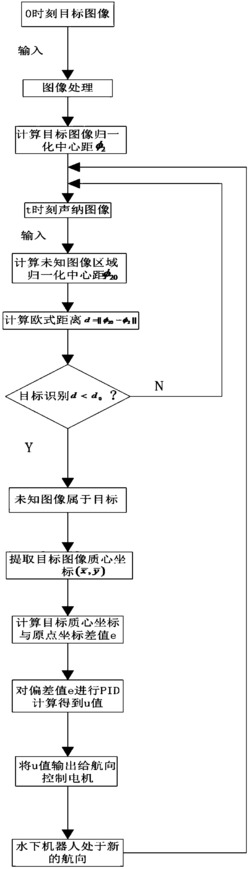
所述的处理器1设置遍历路径规划方法,所述的遍历路径规划方法包括以下步骤:
(1) 所述的处理器1内部设置数组A={A(0),A(1)},其中A(i)=Ri,i=0,1,其中,Ri表示所述的割草机器人23存储的无线信号强度值;所述的割草机器人23离开所述的充电基座22,存储当前无线信号强度值A[0]=R;
(2) 所述的割草机器人23向左旋转并沿着墙边行走,采用中心距计算算法,计算所述的割草机器人23距离所述的充电基座22的行走距离d,当行走距离d>W时,则存储当前无线信号强度值A[0]=R,进入步骤3,其中,W为所述的割草机器人23的车身宽度;如果无线信号强度值R>A[0],则进入步骤8;
在步骤2中,所述的割草机器人23在左侧边界,完成一个车身宽度的移动,为下一个的路径规划做准备;同时,如果所述的割草机器人23已经完成了草地的遍历路径规划,处在工作环境的最远端,那么在步骤2中,不能完成一个车身宽度的移动,反而会向所述的充电基座22方向移动,因此无线信号强度值R会变大,导致R>A[0],可作为遍历路径规划结束的判断条件。
所述的中心距计算算法设置为:
行走距离d=10^[(P-R)/(10×n)]-10^[(P-A[0])/(10×n)],其中,P为距离所述的第二WIFI模块15一米的位置测得的无线信号强度值RSSI,n为环境参数,对于家庭环境设置为2;模型10^[(P-R)/(10×n)]为所述的第一WIFI模块3到所述的第二WIFI模块15的距离的标准模型。
(3) 所述的割草机器人23进入向左循迹过程,循迹路径为无线信号强度等值线,即无线信号强度为A[0]的路径;当所述的割草机器人23遇到障碍物时,存储无线信号强度值A[1]=R,以左侧沿着障碍物行走,当|R-A[1]|>δ后,进入步骤4,其中δ设置为接近于零的阈值;当所述的割草机器人23通过所述的边界检测电路7检测到边界,则进入步骤5;
所述的向左循迹过程设置为:当R>A[0]+δ,所述的割草机器人向左旋转,直到A[0]-δ<R<A[0]+δ;当R<A[0]+δ,向右旋转,直到A[0]-δ<R<A[0]+δ;保持直线前进。
因为无线信号是以发射源为中心向外辐射的,信号强度随着距离的增加而降低,具有连续性,所述的割草机器人23沿着无线信号强度等值线行走,并且两个无线信号强度等值线之间保持一个车身宽度的间距,就可以实现遍历路径规划。
在步骤3中,当所述的割草机器人23遇到障碍物时,需要离开当前位置,即|R-A[1]|>δ,然后进入绕障步骤;当所述的割草机器人23遇到边界时,所述的边界检测电路7输出有效信号,进入一个车身宽度的移动步骤。
(4) 所述的割草机器人23以左侧沿着障碍物行走;当|R-A[1]|<δ,返回步骤3;
在步骤4中,所述的割草机器人23绕着障碍物行走,当重新回到无线信号强度等值线A[1]时,返回到步骤3。
(5) 所述的割草机器人23向右旋转并以右侧沿着墙边行走,采用中心距计算算法,计算所述的割草机器人23距离所述的充电基座22的行走距离d,当行走距离d>W时,则存储当前无线信号强度值A[0]=R,进入步骤6;如果无线信号强度值R>A[0],则进入步骤8;
同步骤2,进行一个车身宽度的移动,同时检测遍历路径规划结束的条件。
(6)所述的割草机器人23进入向右循迹过程,循迹路径为无线信号强度等值线,即无线信号强度为A[0]的路径;当所述的割草机器人23遇到障碍物时,存储无线信号强度值A[1]=R,以左侧沿着障碍物行走,当|R-A[1]|>δ后,进入步骤7;当所述的割草机器人23通过所述的边界检测电路7检测到边界,则进入步骤2;
所述的向右循迹过程设置为:当R>A[0]+δ,所述的割草机器人向右旋转,直到A[0]-δ<R<A[0]+δ;当R<A[0]+δ,向左旋转,直到A[0]-δ<R<A[0]+δ;保持直线前进。
同步骤3,向左循迹过程中,进行障碍物及边界的检测。
(7) 所述的割草机器人23以左侧沿着障碍物行走;当|R-A[1]|<δ,返回步骤6;
在步骤7中,所述的割草机器人23绕着障碍物行走,当重新回到无线信号强度等值线A[1]时,返回到步骤6。
(8) 结束遍历路径规划。
基于无线信号强度的割草机器人遍历路径规划方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0