









专利摘要
本发明公开了一种基于光强检测的自动跟随系统,包括安全头盔(13)、导轨(3)和设置在导轨上的行走车(1);安全头盔上设有发光模块(14);行走车底部设有光强检测装置(11);光强检测装置的圆弧面上设有多个光强传感器(5);光强检测装置用于检测各光强传感器从发光模块获得的光强量;行走车上设有电池(8)、电路板(9)和用于驱动行走车的电机(10);电路板上集成有MCU和电机驱动电路;MCU能根据光强检测装置检测的光强信号确定目标物相对行走车的角度,并基于该角度控制行走车的行走,实现行走车对目标物的自动跟随;该基于光强检测的自动跟随系统结构巧妙,能自动跟随,自动化程度高。
权利要求
1.一种基于光强检测的自动跟随系统,其特征在于,包括安全头盔(13)、导轨(3)和设置在导轨上的行走车(1);
安全头盔上设有发光模块(14);
行走车底部设有连接杆(12);连接杆的下端设有光强检测装置(11);
光强检测装置具有一个圆弧面;所述的圆弧面上设有多个光强传感器(5);光强检测装置用于检测各光强传感器从发光模块获得的光强量;
行走车上设有电池(8)、电路板(9)和用于驱动行走车的电机(10);电路板上集成有MCU和电机驱动电路;电池为电路板及电机供电;
MCU能根据光强检测装置检测的光强信号确定目标物相对行走车的角度,并基于该角度控制行走车的行走,实现行走车对目标物的自动跟随;
所述的目标物为佩戴安全头盔的人体。
2.根据权利要求1所述的基于光强检测的自动跟随系统,其特征在于,多个光强传感器沿圆弧面的周向等间距布置。
3.根据权利要求1所述的基于光强检测的自动跟随系统,其特征在于,导轨为2条,且平行布置,行走车设置在导轨上,行走车底部设有至少4个行走轮;行走车能沿导轨运动。
4.根据权利要求1所述的基于光强检测的自动跟随系统,其特征在于,行走车底部与目标物之间设有起安全作用的绳索(6);绳索的上端连接行走车,绳索的下端用于连接目标物。
5.根据权利要求1所述的基于光强检测的自动跟随系统,其特征在于,电路板上设有检测电路;所述的检测电路包括多选一切换开关和A/D转换器;
多个光强传感器分别接多选一切换开关的多个输入端;多选一切换开关的输出端接A/D转换器的输入端;A/D转换器的输出端接MCU的信号输入端口;多选一切换开关的通道选择端接MCU的IO端。
6.根据权利要求5所述的基于光强检测的自动跟随系统,其特征在于,多选一切换开关为16选一的切换开关;多选一切换开关的通道选择端为4个。
7.根据权利要求1所述的基于光强检测的自动跟随系统,其特征在于,所述的MCU为单片机、DSP或ARM处理器。
8.根据权利要求1所述的基于光强检测的自动跟随系统,其特征在于,行走车的前端或底部设有监控摄像头。
9.根据权利要求1所述的基于光强检测的自动跟随系统,其特征在于,行走轮为4个;2条导轨之间设有多根横梁,横梁与导轨垂直;多根横梁等间距均匀布置;所述的行走车底部设有吊环(4),绳索的上端与吊环铰接。
10.根据权利要求1-9任一项所述的基于光强检测的自动跟随系统,其特征在于,所述电机为步进电机。
说明书
技术领域
本发明涉及一种基于光强检测的自动跟随系统。
背景技术
户外拓展运动中,缅甸桥为常用的一个项目,在该项目中,设置有3条平行布置的主钢索,其中1条在下,用于行走,另两条在上,用于学员的两手抓住;该项目能锻炼学员的胆略、身体协调能力,而且集刺激、惊险和趣味性等于一体;为安全起见,在高空设置一条保险用的钢索,钢索上垂下安全带系在学员腰部,但是,这种安全带较重,且安全带与顶部的钢索之间摩擦较大,因此,这种安全保护装置给学员带来极大的负担和不便。
另外,在某些装配车间中,也需要设置跟随系统,为装配人员提供最便捷的服务。
因此,有必要设计一种新的基于光强检测的自动跟随系统。
发明内容
本发明所要解决的技术问题是提供一种基于光强检测的自动跟随系统,该基于光强检测的自动跟随系统结构巧妙,能自动跟随,自动化程度高。
发明的技术解决方案如下:
一种基于光强检测的自动跟随系统,包括安全头盔、导轨和设置在导轨上的行走车;
安全头盔上设有发光模块;
行走车底部设有连接杆;连接杆的下端设有光强检测装置;
光强检测装置具有一个圆弧面;所述的圆弧面上设有多个光强传感器;光强检测装置用于检测各光强传感器从发光模块获得的光强量;
行走车上设有电池、电路板和用于驱动行走车的电机;电路板上集成有MCU和电机驱动电路;电池为电路板及电机供电;
MCU能根据光强检测装置检测的光强信号确定目标物相对行走车的角度,并基于该角度控制行走车的行走,实现行走车对目标物的自动跟随;
所述的目标物为佩戴安全头盔的人体。
多个光强传感器沿圆弧面的周向等间距布置。
导轨为2条,且平行布置,行走车设置在导轨上,行走车底部设有至少4个行走轮;行走车能沿导轨运动。
行走车底部与目标物之间设有起安全作用的绳索;绳索的上端连接行走车,绳索的下端用于连接目标物,一般是接人体的安全背心的腰部或肩背部或胸腹部。
电路板上设有检测电路;所述的检测电路包括多选一切换开关和A/D转换器;
多个光强传感器分别接多选一切换开关的多个输入端;多选一切换开关的输出端接A/D转换器的输入端;A/D转换器的输出端接MCU的信号输入端口;多选一切换开关的通道选择端接MCU的IO端。
多选一切换开关为16选一的切换开关;多选一切换开关的通道选择端为4个。
所述的MCU为单片机、DSP或ARM处理器。
行走车的前端或底部设有监控摄像头。
行走轮为4个;2条导轨之间设有多根横梁,横梁与导轨垂直;多根横梁等间距均匀布置;所述的行走车底部设有吊环,绳索的上端与吊环铰接。
所述电机为步进电机。
另外,行走车上还设有太阳能电池板以及充电电路,能通过太阳能为电池充电,节能环保。
绳索为弹性伸缩的绳索。
弧面的角度为A,A优选为90°或180°,即四分之一圆形或半圆;控制方法如下:
步骤1:光强检测:
MCU通过多选一切换开关和A/D转换器,轮询(依次循环)检测每一个光强传感器获得的光强信号;找出最强光强信号对应的光强传感器i;
步骤2:计算目标物相对于行走车的角度;
所述的角度为
a=(i-1)*A/(N-1);其中N为光强传感器的总个数;角度单位为度;
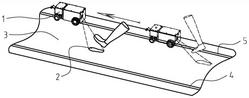
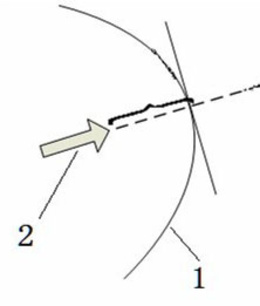
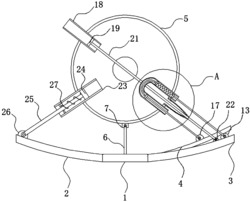
以水平方向为零度;以图3中最左边的一个光强传感器为第1个;最右的为第N个;且第一个设置在0度位置上,第N个设置在最大角度位置上。
步骤3:计算需要行走的距离S;
S=L*tan(a);其中tan(.)为正切函数,L为导轨到目标物的垂直距离;一般L是恒定的,为常数。
步骤4:MCU驱动行走车向前行走S;再返回步骤1,进行下一轮控制。
行走轮上设有码盘,从而能记录行走车的行走距离。或者行走路上设有定位模块(如GPS模块而后北斗模块),可以计算行走距离。
另外,飞行器也可以采用这种自动跟随系统。
本发明的检测原理:
发光模块为向四周均匀发出光线,因此,距离发光模块最近,且方向正对的那个光强传感器获得的光强最大;由此可以检测到目标物相对于检测模块的角度。
绳索的上设有倾角传感器;倾角传感器与电路板上的MCU连接;倾角传感器为数字式传感器,倾角传感器输出倾角数据到MCU的输入接口;所述的电池为动力锂电池。
另一种实施方式如下:
一种基于机器视觉的位置检测模组,包括机器视觉检测装置和设置在目标物上的发光模块;
机器视觉检测装置包括安装平台、云台和相机;
云台通过连接杆设置在安装平台的底部或前端;相机安装在云台上;
安装平台上设有电池和电路板;在电路板上设有MCU和存储器;MCU与存储器相连;电池为电路板供电;
相机用于获取图像并将该图像传输到存储器中;发光模块即目标点的成像位于该图像中;
MCU对存储器中存储的图像进行处理,并计算目标点与安装平台的水平距离。
所述的安装平台为设置在导轨上的行走车。
发光模块设置在目标物佩戴的安全头盔上。
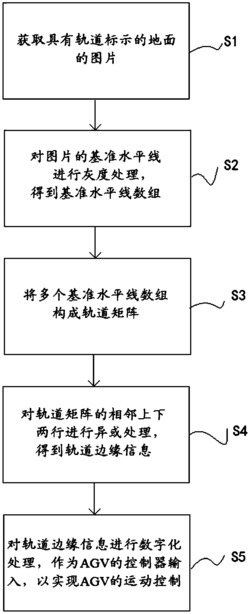
MCU对存储器中存储的图像进行处理的步骤如下:
步骤1:分离目标点;
通过边缘检测技术或阈值分割技术实现目标点P的分离;因为目标点的亮度远远高于其他像素的亮度,因此,优选阈值分割技术;阈值的选择为基于经验选择。
步骤2:确定目标点图像坐标;
分离出的目标点位于一个包含多个像素的连通区域,对该连通区域的边缘像素进行圆拟合,获得的圆心即为目标点的图像坐标;
步骤3:计算发光模块与安装平台的水平距离;
以O为图像的中心点;该中心点对应安装平台的位置;
计算目标点P与O点之间的水平像素个数N;
发光模块距离安装平台的水平距离S=k*N;k为比例系数。由于导轨与目标物之间的高度基本上是不变的,则k为常数。
一种基于机器视觉的实时防护系统,包括导轨、绳索以及前述的位置检测模组;
在行走车上还设有驱动安装平台平移的电机;电机由电池驱动;电路板中设有电机驱动电路;
绳索的上端连接行走车,绳索的下端用于连接作为目标物的人体。一般是接人体的安全背心的腰部或肩背部或胸腹部。
导轨为2条,且平行布置,行走车设置在导轨上,行走车底部设有至少4个行走轮;行走车能沿导轨运动。
所述的MCU为单片机、DSP或ARM处理器。
行走车的前端或底部设有监控摄像单元(用于获取实时监控图像,该摄像单元为普通的摄像单元,不用于确定目标物位置)。
行走轮为4个;2条导轨之间设有多根横梁(7),横梁与导轨垂直;多根横梁等间距均匀布置;所述的行走车底部设有吊环(4),绳索的上端与吊环铰接。
所述电机为步进电机。
总体步骤:
步骤A:基于图像处理计算发光模块到安装平台的水平距离S;
步骤B:MCU驱动行走车向前行走S;再返回步骤A,进行下一轮控制。
有益效果:
本发明的基于光强检测的自动跟随系统,具有以下功能:
(1)行走车由电机驱动,且沿着轨道行走,运行顺畅,不会为学员带来负担;
(2)行走车具备智能性,能基于光强传感器检测的数据判断目标物位置,从而自动行走,自动化程度高。
具体来讲,若角度(相对于水平方向)较小,说明学员在行走车前方较远,则起动电机,驱动行走车向前行走,紧跟学员。
(3)可靠性高。
即使电池故障,不能驱动行走车,学员较小的拉力也能带动行走车行走。
(4)采用双导轨,多轮行走,稳定性好。
(5)行走车底部设有吊环,专门用于与绳索铰接,连接方便。
(6)头盔不能能保护人体的头部,还能发送光讯号。
综上所述,这种基于光强检测的自动跟随系统构思巧妙,安全性高,使用方便,自动化程度高。
附图说明
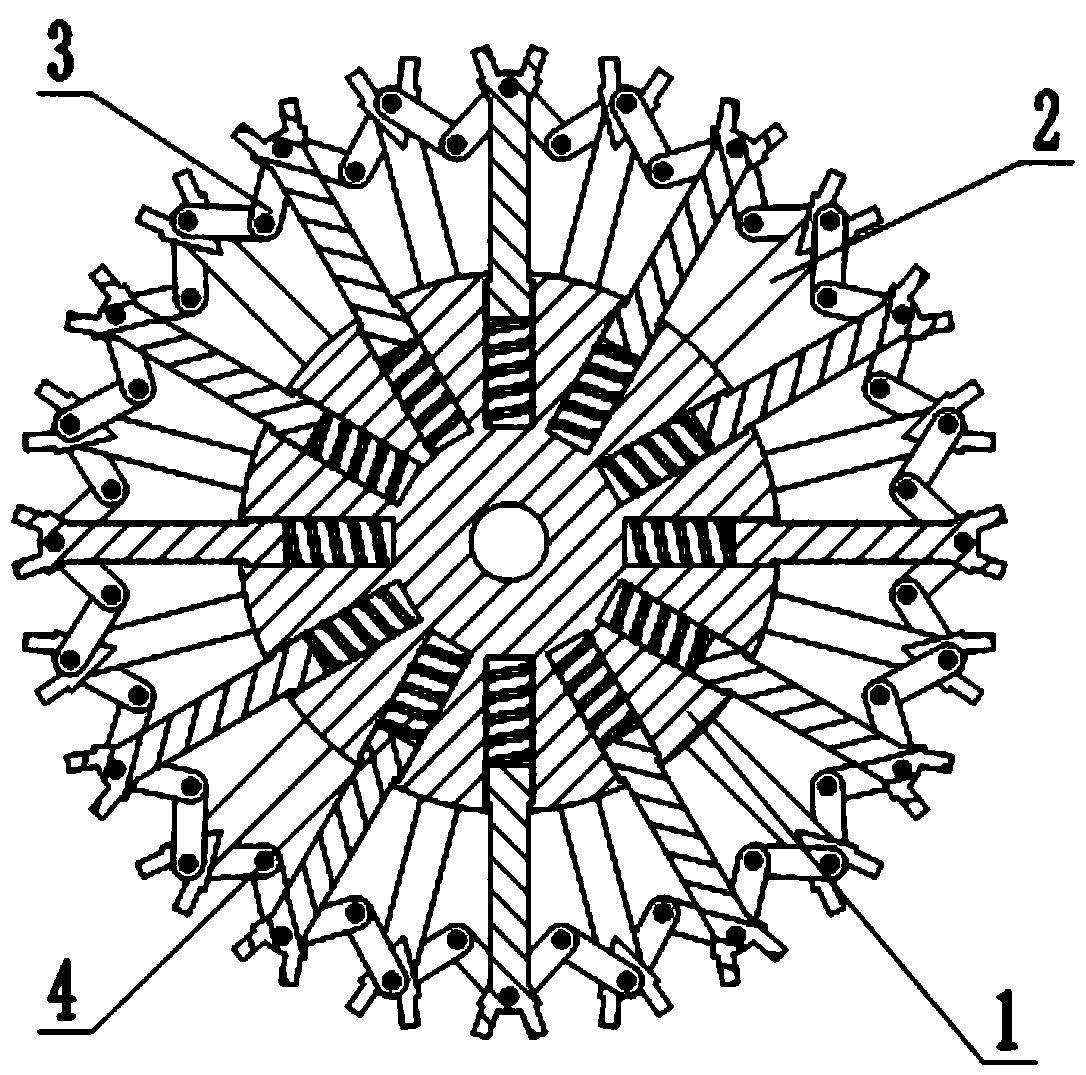
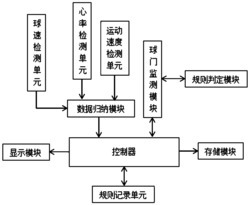
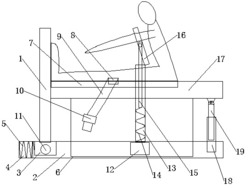
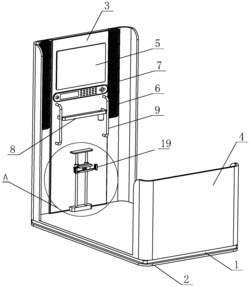
图1为基于光强检测的自动跟随系统的总体结构示意图;
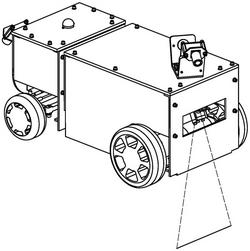
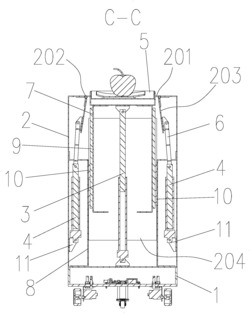
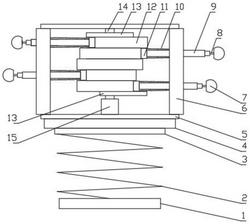
图2为行走车与导轨配合示意图;
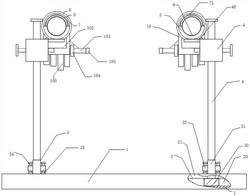
图3为光强检测示意图;
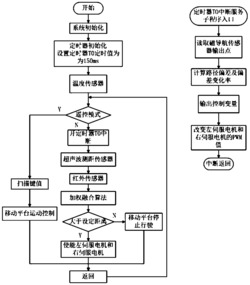
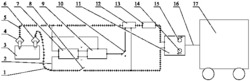
图4为控制系统的电原理框图。
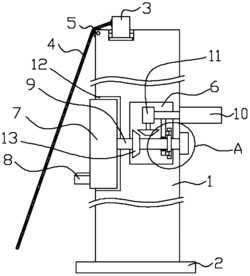
标号说明:1-行走车,2-行走轮,3-导轨,4-吊环,5-光强传感器,6-绳索,7-横梁,8-电池,9-电路板,10-电机,11-光强检测装置,12-连接杆,13-安全头盔,14-发光模块。
具体实施方式
以下将结合附图和具体实施例对本发明做进一步详细说明:
实施例1:如图1~4,一种基于光强检测的自动跟随系统,包括安全头盔13、导轨3和设置在导轨上的行走车1;
安全头盔上设有发光模块14;
行走车底部设有连接杆12;连接杆的下端设有光强检测装置11;
光强检测装置具有一个圆弧面;所述的圆弧面上设有16个光强传感器5;光强检测装置用于检测各光强传感器从发光模块获得的光强量;
行走车上设有电池8、电路板9和用于驱动行走车的电机10;电路板上集成有MCU和电机驱动电路;电池为电路板及电机供电;
MCU能根据光强检测装置检测的光强信号确定目标物相对行走车的角度,并基于该角度控制行走车的行走,实现行走车对目标物的自动跟随;
所述的目标物为佩戴安全头盔的人体。
多个光强传感器沿圆弧面的周向等间距布置。
导轨为2条,且平行布置,行走车设置在导轨上,行走车底部设有4个行走轮2;行走车能沿导轨运动。
行走车底部与目标物之间设有起安全作用的绳索6;绳索的上端连接行走车,绳索的下端用于连接目标物,一般是接人体的安全背心的腰部或肩背部或胸腹部。
电路板上设有检测电路;所述的检测电路包括多选一切换开关和A/D转换器;
多个光强传感器分别接多选一切换开关的多个输入端;多选一切换开关的输出端接A/D转换器的输入端;A/D转换器的输出端接MCU的信号输入端口;多选一切换开关的通道选择端接MCU的IO端。
多选一切换开关为16选一的切换开关;多选一切换开关的通道选择端为4个。
所述的MCU为单片机、DSP或ARM处理器。
行走车的前端或底部设有监控摄像头。
2条导轨之间设有多根横梁7,横梁与导轨垂直;多根横梁等间距均匀布置;所述的行走车底部设有吊环4,绳索的上端与吊环铰接。
所述电机为步进电机。
另外,行走车上还设有太阳能电池板以及充电电路,能通过太阳能为电池充电,节能环保。
绳索为弹性伸缩的绳索。
弧面的角度为A,A为180°,即半圆;控制方法如下:
步骤1:光强检测:
MCU通过多选一切换开关和A/D转换器,轮询(依次循环)检测每一个光强传感器获得的光强信号;找出最强光强信号对应的光强传感器i;
步骤2:计算目标物相对于行走车的角度;
所述的角度为
a=(i-1)*180°/15;;角度单位为度;
以水平方向为零度;以图3中最左边的一个光强传感器为第1个;最右的为第16个;
步骤3:计算需要行走的距离S;
S=L*tan(a);其中tan(.)为正切函数,L为导轨到目标物的垂直距离;一般L是恒定的,作为常数。
步骤4:MCU驱动行走车向前行走S;再返回步骤1,进行下一轮控制。
行走轮上设有码盘,从而能记录行走车的行走距离。或者行走路上设有定位模块(如GPS模块而后北斗模块),可以计算行走距离。
一种基于光强检测的自动跟随系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



动态评分
0.0