







专利摘要
本发明提供的一种球面分配引导的数据匹配立体声场重构方法,采用全向麦克风阵列对声场高阶球谐项分量精确搜集和重构的原理,提出了基于球面分配的数据匹配立体声场重构方法,分为立体声场搜集阶段和立体声场重构阶段。与网格分配法的对比实验表明:当信号频率为1kHz时,球面分配匹配点数目减少56.2%,重构平均误差降低44.3%,采用球面分配匹配点在立体声场重构性能方面带来了很大提升,不仅减少了匹配点的数目,更从根本上解决了网格分配中矩阵不可逆的问题,为运用数据匹配重构立体声场提供了新的更优的匹配点选取方案。
权利要求
1.一种球面分配引导的数据匹配立体声场重构方法,其特征在于:基于全向麦克风阵列对声场高阶球谐项分量精确搜集和重构,分为立体声场搜集阶段和立体声场重构阶段,在立体声场搜集阶段,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列开发高阶球谐项分量搜集系统,搜集立体声场在中心重构区域对应的球谐系数,在立体声场重构阶段,利用全向麦克风阵列搜集得到球谐系数,基于高阶环境立体混合声立体声场重构方法,实现立体声场的精确重构;
一种球面分配引导的数据匹配立体声场重构方法包括四个步骤:
第一步,立体声场搜集,用一组均匀轴向分布在球面的全向麦克风阵列开发高阶球谐项分量搜集系统;
第二步,立体声场重构一,按照球面分配匹配点配置规则,得出匹配点分配的最佳球半径与重构区域球半径存在的线性关系;
第三步,立体声场重构二,按照球面分配匹配点选取方法,计算球面分配的匹配点数目;
第四步,立体声场重构三,根据全向麦克风阵列的排布规则,得到球面分配匹配点的完备空间分布;
在立体声场搜集阶段,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列开发高阶球谐项分量搜集系统,搜集理想立体声场在中心重构区域对应的球谐系数,匹配点x=(θ,φ,x)∈Ω处的声场用球谐函数表示为:
其中f
其中标记“*”表示共轭,δ
C(x;k)为声源在重构区域接收点x处的的声场,当有足够多的样本点在半径为x球面上分布,并已知各个样本点对应的声压值时,就能精确计算出球谐系数f
本发明利用一组按照适当位置在空间三维球面不同轴向分配全向麦克风组阵列,实现高阶球谐系数的精确搜集,将单位球面积分变为离散求和,设分布在半径为R的球面上的全向麦克风数目为A,每一个麦克风对应的声场表示为C(x
近似写为:
其中a=1,...,A,ω
A≥(N+1)
全向麦克风阵的球面摆放形式为按照高度角和水平角将球划分为网格,每个全向麦克风均含有高度角和水平角信息,全向麦克风的数目至少为(2N-1)
在立体声场重构阶段,按照球面分配匹配点选取方法,计算球面分配的匹配点数目;
已知重构区域求半径r
c为声速,符号
2.根据权利要求1所述的一种球面分配引导的数据匹配立体声场重构方法,其特征在于:球面分配匹配点选取方法匹配点遵循球谐正交分解原理,构建的方程组不存在线性相关,直接求解得到全局最优解;
球面分配匹配点选取方法中,通过环境立体混合声用一组正交的球谐函数的线性组合表达和重构声场,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列研发高阶球谐项分量搜集系统,搜集理想立体声场在中心重构区域对应的球谐系数,利用全向麦克风阵列搜集得到球谐系数,再基于高阶环境立体混合声立体声场重构方法,实现立体声场的精确重构。
3.根据权利要求1所述的一种球面分配引导的数据匹配立体声场重构方法,其特征在于:在立体声场重构阶段,按照球面分配匹配点配置规则,得出匹配点分配的最佳球半径与重构区域球半径存在的线性关系;
采用环境立体混合声技术重构声场时扬声器阵列严格满足球面分配的几何特点,由重建区域半径x
根据环境立体混合声的36-和49-扬声器阵列的重构平均误差随半径变化的曲线,取误差最小时对应的半径值,36-扬声器阵列点分布对应0.16m,49-扬声器阵列点分布对应0.20m,计算最佳样本点分配半径与重构区域球半径的比值,
u
取二者的平均值,比例系数为0.60,归纳出匹配点最佳分配球半径与重构区域球半径的关系:
r
说明书
技术领域
本发明涉及一种数据匹配立体声场重构方法,特别涉及一种球面分配引导的数据匹配立体声场重构方法,属于立体声场重构方法技术领域。
背景技术
立体声音频技术近些年来受到广泛的关注,并逐渐由大荧幕走向家庭等小型观影环境和个人移动端。立体声是具有立体感的声音,与单声道相比,立体声具有各声源的方位感和分布感,提高了信息的清晰度和可懂度,提高了音频的临场感、层次感和透明度。立体声音视频技术的高速发展,离不开经济社会的迅速腾飞和娱乐体验需求的快速提高,更是科学技术迅速发展的结果,娱乐产业的飞速发展使立体声音视频技术成为多媒体技术领域的研究热点和进一步发展的重要领域。若想为用户提供高品质的三维感受,立体声音频必须与三维视频协同工作和同步展示,市场上支持三维视频播放的设备层出不穷,例如红蓝三维、偏振三维、甚至裸眼3D等,而立体声音频技术的发展和应用则相对落后,传统的低品质音频仍占据了大多数音频市场甚至是家庭影院和电影剧场,本发明希望构建的立体声音频是在体验者戴着耳机时,完全忘记耳机的存在的高品质立体声,它是增强现实和虚拟现实技术提供彻底的沉浸式体验的必经之路,可以预见,高品质立体声音频技术即将迎来更广阔的前景,并成为多媒体技术领域的研究热点和最重要的研发趋势。
音频专家森海塞尔推出了一项基于立体声场景沉浸式音频的突破性技术,实现音频采集与重放,将用户的听觉体验转化到从虚拟现实游戏到音频录音与广播的多种应用中。立体声音频技术主要包括采集、编码和重构几个基本步骤,现有技术的音频采集已经有了较多的技术方案,但立体声音频声场重构技术和编码压缩技术还存在明显短板,立体声音频包含的空间参数信息和基于扬声器阵列的重构技术带来的多声道信号将会导致立体声音频在编解码环节数据量的激增,然而编解码环节不能丢弃空间参数信息来达到降低数据量的目的,所以声场重构环节是保证沉浸式体验和多声道信号数据量控制的关键,现有技术在立体声场重构环节还存在失真明显,重构误差大,数据冗余严重,运行速度慢等诸多难题。
基于扬声器阵列的立体声场重建以听音区原始声场为理想声场,通过对扬声器信号权重重新分配,使扬声器发出的声波互相叠加,在目标听音区合成出与原始声场相同的立体声场,使听众在重构的听音区也能够感受到与原始声源一致的空间立体方位感。扬声器的信号权重随听音区位置和原始声源方位信息变化而变化,现有技术由于受到声场重建技术的限制,听音区位置只能位于扬声器阵列中心,为了让更多的听众能同时享受立体声音频带来的乐趣,主要途径就是增加扬声器数目,重构更大的立体声听音区,然而数量过多且几何分布严苛的扬声器阵列在一般的大型高端观影场所中都不易实现,更不用说在家庭等小型普通观影环境中应用了。在基于扬声器阵列的立体声场重构研究中,如何采用较少数量的扬声器,重构能够同时容纳多人的听音区是一个具有实用性和创造性的难题。现有技术主流的声场重构技术主要针对中心区域的简单重构,如日本广播公司基于NHK22.2多声道系统的声场重构中,当扬声器数目为22个时,重构区域半径仅为0.216米,只能满足单人需求。
综合来看,现有技术的植物识别分类方法主要存在以下几点缺陷:一是现有技术的立体声音频声场重构技术和编码压缩技术还存在明显短板,立体声音频包含的空间参数信息和基于扬声器阵列的重构技术带来的多声道信号将会导致立体声音频在编解码环节数据量的激增,然而编解码环节不能丢弃空间参数信息来达到降低数据量的目的,所以声场重构环节是保证沉浸式体验和多声道信号数据量控制的关键,现有技术在立体声场重构环节还存在失真明显,重构误差大,数据冗余严重,运行速度慢等诸多难题;二是现有技术由于受到声场重建技术的限制,听音区位置只能位于扬声器阵列中心,为了让更多的听众能同时享受立体声音频带来的乐趣,主要途径就是增加扬声器数目,重构更大的立体声听音区,然而数量过多且几何分布严苛的扬声器阵列在一般的大型高端观影场所中都不易实现,更不用说在家庭等小型普通观影环境中应用了,在基于扬声器阵列的立体声场重构研究中,如何采用较少数量的扬声器,重构能够同时容纳多人的听音区是一个具有实用性和创造性的难题;三是现有技术数据匹配立体声场重构方法中,匹配点呈现均匀网格分配,是独立于扬声器的几何排布,处于同一直线和同一平面的匹配点会构建线性相关方程组,导致矩阵不可逆,得不到全局最优解,匹配点的空间分布不合理,匹配点数目过大,重构平均误差高,立体声场重构性能较差,效率低、成本高、出错多,立体声场重构的准确性和可靠性不够。
发明内容
针对现有技术的不足,本发明提供的一种球面分配引导的数据匹配立体声场重构方法,采用全向麦克风阵列对声场高阶球谐项分量精确搜集和重构的原理,提出了基于球面分配的数据匹配立体声场重构方法,分为立体声场搜集阶段和立体声场重构阶段,在立体声场搜集阶段,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列开发高阶球谐项分量搜集系统,搜集立体声场在中心重构区域对应的球谐系数,在立体声场重构阶段,利用全向麦克风阵列搜集得到球谐系数,基于高阶环境立体混合声立体声场重构方法,实现立体声场的精确重构,得到匹配点的完备空间分布。与网格分配法的对比实验表明:当信号频率为1kHz时,球面分配匹配点数目减少56.2%,重构平均误差降低44.3%,采用球面分配匹配点在立体声场重构性能方面带来了很大提升,不仅减少了匹配点的数目,更从根本上解决了网格分配中矩阵不可逆的问题,为运用数据匹配重构立体声场提供了新的更优的匹配点选取方案,匹配点的空间分布合理,匹配点数目设置科学,立体声场重构性能好,效率高、成本低、出错少,立体声场重构的准确性和可靠性高。
为达到以上技术效果,本发明所采用的技术方案如下:
一种球面分配引导的数据匹配立体声场重构方法,基于全向麦克风阵列对声场高阶球谐项分量精确搜集和重构,分为立体声场搜集阶段和立体声场重构阶段,在立体声场搜集阶段,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列开发高阶球谐项分量搜集系统,搜集立体声场在中心重构区域对应的球谐系数,在立体声场重构阶段,利用全向麦克风阵列搜集得到球谐系数,基于高阶环境立体混合声立体声场重构方法,实现立体声场的精确重构;
一种球面分配引导的数据匹配立体声场重构方法包括四个步骤:
第一步,立体声场搜集,用一组均匀轴向分布在球面的全向麦克风阵列开发高阶球谐项分量搜集系统;
第二步,立体声场重构一,按照球面分配匹配点配置规则,得出匹配点分配的最佳球半径与重构区域球半径存在的线性关系;
第三步,立体声场重构二,按照球面分配匹配点选取方法,计算球面分配的匹配点数目;
第四步,立体声场重构三,根据全向麦克风阵列的排布规则,得到球面分配匹配点的完备空间分布;
在立体声场搜集阶段,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列开发高阶球谐项分量搜集系统,搜集理想立体声场在中心重构区域对应的球谐系数,匹配点x=(θ,φ,x)∈Ω处的声场用球谐函数表示为:
其中fnm(k)为球谐系数,n(n=0,...8)和m(m=-n,...,n)是整数,n为环境立体混合声阶数,jn(·)为n阶球贝塞尔函数,Ynm(x)为球谐函数,球谐函数展开遵循以下的正交分解特性:
其中标记“*”表示共轭,δnp为克罗内克δ函数,积分域为单位球,分离得到球谐系数:
C(x;k)为声源在重构区域接收点x处的的声场,当有足够多的样本点在半径为x球面上分布,并已知各个样本点对应的声压值时,就能精确计算出球谐系数fnm(k),若为高阶声场麦克风必能搜集包围它的声场对应的球谐系数fnm(k);
本发明利用一组按照适当位置在空间三维球面不同轴向分配全向麦克风组阵列,实现高阶球谐系数的精确搜集,将单位球面积分变为离散求和,设分布在半径为R的球面上的全向麦克风数目为A,每一个麦克风对应的声场表示为C(xa;k),a=1,...,A,公式:
近似写为:
其中a=1,...,A,ωa为一组适当权重,推导全向麦克风个数与阶数N之间的关系满足:
A≥(N+1)
全向麦克风阵的球面摆放形式为按照高度角和水平角将球划分为网格,每个全向麦克风均含有高度角和水平角信息,全向麦克风的数目至少为(2N-1)
在立体声场重构阶段,按照球面分配匹配点选取方法,计算球面分配的匹配点数目;
已知重构区域求半径rmax,在匹配点网格化选取方案的做法是先在xoy平面划分网格,将匹配点分配在横线与竖线交点上,足够离散的扬声器可近似表达基尔霍夫积分定理公式,理想的波场合成效果需要扬声器组按照至少小于最高频率的半波长,所以规定相邻的横线或竖线的间隔w要小于信号中最高频率zmax声波信号波长的1/2,将规定相邻的横线或竖线的间隔w选为信号中最高频率zmax声波信号波长的1/4,即w=c/(4zmax),设置匹配点密度能够很好地确定单层匹配点数目为:
c为声速,符号 表示取大于或者等于指定表达式的最小整数,z轴划分间隔为0.01,且范围为[0.1rmax,0.1rmax],得到纵向匹配点层数为Nportrait=20rmax+1,则总的点数为Ngrid=NportraitNxoy,给定的匹配点密度,计算出球面分布匹配点数目为同条件下网格化匹配点数目的1/2,即Nround=Ngrid/2,若网格分配匹配点个数为Ngrid=520,那么求得球面分配匹配点个数为260,考虑球面分配匹配点个数为一个数的平方,最终设置为Nround=16
一种球面分配引导的数据匹配立体声场重构方法,进一步的,球面分配匹配点选取方法匹配点遵循球谐正交分解原理,构建的方程组不存在线性相关,直接求解得到全局最优解;
球面分配匹配点选取方法中,通过环境立体混合声用一组正交的球谐函数的线性组合表达和重构声场,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列研发高阶球谐项分量搜集系统,搜集理想立体声场在中心重构区域对应的球谐系数,利用全向麦克风阵列搜集得到球谐系数,再基于高阶环境立体混合声立体声场重构方法,实现立体声场的精确重构;
一种球面分配引导的数据匹配立体声场重构方法,进一步的,在立体声场重构阶段,按照球面分配匹配点配置规则,得出匹配点分配的最佳球半径与重构区域球半径存在的线性关系;
采用环境立体混合声技术重构声场时扬声器阵列严格满足球面分配的几何特点,由重建区域半径x0与环境立体混合声阶数N之间的关系,分别得到重构半径rmax为0.272m和0.326m,选取足够多的球面分配匹配点,球面分配匹配点的个数设置为144个,设置分配球半径增长间隔为0.02m,分别让重构半径rmax从0.01m增加到0.272m和0.326m,每循环一次计算一次样本点分布在半径球赤道面的平均重构误差,并保存当前半径和平均误差值,用于后面画图观察误差最小时对应的半径,即为要找的最佳分配半径;
根据环境立体混合声的36-和49-扬声器阵列的重构平均误差随半径变化的曲线,取误差最小时对应的半径值,36-扬声器阵列点分布对应0.16m,49-扬声器阵列点分布对应0.20m,计算最佳样本点分配半径与重构区域球半径的比值,
u1=0.16/0.272=58.8%;u2=0.20/0.326=61.3%
取二者的平均值,比例系数为0.60,归纳出匹配点最佳分配球半径与重构区域球半径的关系:
rbest=0.60rmax。
与现有技术相比,本发明的优点在于:
1.本发明提供的一种球面分配引导的数据匹配立体声场重构方法,采用全向麦克风阵列对声场高阶球谐项分量精确搜集和重构的原理,提出了基于球面分配的数据匹配立体声场重构方法,分为立体声场搜集阶段和立体声场重构阶段,在立体声场搜集阶段,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列开发高阶球谐项分量搜集系统,搜集立体声场在中心重构区域对应的球谐系数,在立体声场重构阶段,利用全向麦克风阵列搜集得到球谐系数,基于高阶环境立体混合声立体声场重构方法,实现立体声场的精确重构,得到匹配点的完备空间分布。与网格分配法的对比实验表明:当信号频率为1kHz时,球面分配匹配点数目减少56.2%,重构平均误差降低44.3%,采用球面分配匹配点在立体声场重构性能方面带来了很大提升,不仅减少了匹配点的数目,更从根本上解决了网格分配中矩阵不可逆的问题,为运用数据匹配重构立体声场提供了新的更优的匹配点选取方案。
2.本发明提供的一种球面分配引导的数据匹配立体声场重构方法,通过声场重构技术可知,基于数据匹配的声场重构方法的不足在于匹配点数目的确定缺乏指导性,匹配点数目和分配形式直接影响方程组的求解,较少的匹配点会导致欠拟合,造成重构误差较大,数目过多的匹配点会直接导致计算量过大。本发明基于全向麦克风阵列能够准确搜集理想立体声场球谐项分量原理,提出了基于球面分配的数据匹配立体声场重构,匹配点遵循全向麦克风阵列球面轴向分布原理,直接避免了构建线性相关方程组,保证了矩阵可逆,无冗余,能得到全局最优解。匹配点的空间分布合理,匹配点数目设置科学,立体声场重构性能好,效率高、成本低、出错少,立体声场重构的准确性和可靠性高。
3.本发明提供的一种球面分配引导的数据匹配立体声场重构方法,解决了现有技术的立体声音频声场重构技术和编码压缩技术还存在明显短板的问题,立体声音频包含的空间参数信息和基于扬声器阵列的重构技术带来的多声道信号将会导致立体声音频在编解码环节数据量的激增,然而编解码环节不能丢弃空间参数信息来达到降低数据量的目的,所以声场重构环节是保证沉浸式体验和多声道信号数据量控制的关键,本发明立体声场重构环节数据失真少,重构误差小,数据冗余少,运行速度快。
4.本发明提供的一种球面分配引导的数据匹配立体声场重构方法,解决了现有技术由于受到声场重建技术的限制,听音区位置只能位于扬声器阵列中心,为了让更多的听众能同时享受立体声音频带来的乐趣,主要途径就是增加扬声器数目,重构更大的立体声听音区,然而数量过多且几何分布严苛的扬声器阵列在一般的大型高端观影场所中都不易实现,更不用说在家庭等小型普通观影环境中应用的问题,采用较少数量的扬声器,重构能够同时容纳多人的听音区,是一个具有实用性和创造性的技术方案。
附图说明
图1是本发明的一种球面分配引导的数据匹配立体声场重构方法的步骤图。
图2是本发明的全向麦克风阵列球面轴向分布示意图。
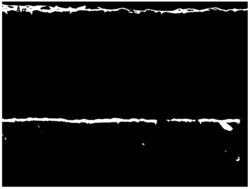
图3是本发明的真实与高阶麦克风搜集的三阶立体声场对比图。
图4是本发明的网格匹配点分配和球面匹配点分配示意图。
具体实施方式
下面结合附图,对本发明提供的一种球面分配引导的数据匹配立体声场重构方法的技术方案进行进一步的描述,使本领域的技术人员可以更好的理解本发明并能予以实施。
参见图1至图4,本发明提供的一种球面分配引导的数据匹配立体声场重构方法,基于全向麦克风阵列对声场高阶球谐项分量精确搜集和重构,分为立体声场搜集阶段和立体声场重构阶段,在立体声场搜集阶段,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列开发高阶球谐项分量搜集系统,搜集立体声场在中心重构区域对应的球谐系数,在立体声场重构阶段,利用全向麦克风阵列搜集得到球谐系数,基于高阶环境立体混合声立体声场重构方法,实现立体声场的精确重构,包括四个步骤:
第一步,立体声场搜集,用一组均匀轴向分布在球面的全向麦克风阵列开发高阶球谐项分量搜集系统;
第二步,立体声场重构,按照球面分配匹配点配置规则,得出匹配点分配的最佳球半径与重构区域球半径存在的线性关系;
第三步,立体声场重构,按照球面分配匹配点选取方法,计算球面分配的匹配点数目;
第四步,根据全向麦克风阵列的排布规则,得到球面分配匹配点的完备空间分布。
一、球面分配匹配点选取方法
针对网格分配匹配点大量冗余,导致数据匹配矩阵不可逆,无法得到最优解,同时当匹配点数目选取过少时,数据欠拟合得不到全局最优解,当匹配点数目选取过多时,会导致计算量的激增的问题。本发明基于全向麦克风阵列对声场高阶球谐项分量精确搜集和重构的原理,提出了球面分配的匹配点选取方法,匹配点遵循球谐正交分解原理,不存在匹配点冗余,构建的方程组不存在线性相关,解决了数据匹配矩阵不可逆的问题,直接能够求解得到全局最优解。
环境立体混合声(Ambisonics)能够用一组正交的球谐函数的线性组合表达和重构声场,高阶环境立体混合声的声场重构技术中,准确计算出理想立体声场对应的球谐系数是极为重要的一步,直接影响立体声场重构效果。因此,搜集给定声场的高阶球谐项分量是立体声场重构中的关键问题。利用高阶环境立体混合声系统搜集和重构过程相互独立的特点,在立体声场搜集阶段,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列研发了高阶球谐项分量搜集系统,成功搜集理想立体声场在中心重构区域对应的球谐系数,麦克风数目越多,搜集到的球谐系数越精确。在立体声场重构阶段,利用全向麦克风阵列搜集得到球谐系数,再基于高阶环境立体混合声立体声场重构方法,实现立体声场的精确重构。
二、立体声场搜集阶段
在立体声场搜集阶段,基于球谐函数分析理论,用一组均匀轴向分布在球面的全向麦克风阵列研发了高阶球谐项分量搜集系统,成功搜集理想立体声场在中心重构区域对应的球谐系数,麦克风数目越多,搜集到的球谐系数越精确;
匹配点x=(θ,φ,x)∈Ω处的声场用球谐函数表示为:
其中fnm(k)为球谐系数,n(n=0,...∞)和m(m=-n,...,n)是整数,n为环境立体混合声阶数,jn(·)为n阶球贝塞尔函数,Ynm(x)为球谐函数,球谐函数展开遵循以下的正交分解特性:
其中标记“*”表示共轭,δnp为克罗内克δ函数,积分域为单位球,分离得到球谐系数:
C(x;k)为声源在重构区域接收点x处的的声场,当有足够多的样本点在半径为x球面上分布,并已知各个样本点对应的声压值时,就能精确计算出球谐系数fnm(k),若为高阶声场麦克风必能搜集包围它的声场对应的球谐系数fnm(k),一个全方位麦克风只能搜集0阶球谐系数f00(k),搜集给定声场对应的高阶球谐系数是一个具有实用性和创造性的难题。
本发明利用一组按照适当位置在空间三维球面不同轴向分配全向麦克风组阵列,实现高阶球谐系数的精确搜集,为实现方便,将单位球面积分变为离散求和,假设分布在半径为R的球面上的全向麦克风数目为A,每一个麦克风对应的声场可以表示为C(xa;k),a=1,...,A,公式:
近似写为:
其中a=1,...,A,ωa为一组适当权重,上式为用一组球面分配的全向麦克风阵列搜集高阶球谐系数提供了新的方法,为了防止高阶球谐项分量的漏采,推导全向麦克风个数与阶数N之间的关系满足:
A≥(N+1)
全向麦克风阵的球面摆放形式为按照高度角和水平角将球划分为网格,(N+1)
图2为全向麦克风阵列球面轴向分布示意图,该阵列被称为全向麦克风阵列,根据全向麦克风阵列能精确搜集理想声场球谐项分量原理,在数据匹配的立体声场重构方法中,以全向麦克风阵列的球面分配位置作为匹配点的位置,获取足够的声压数据。
立体声场搜集可行性实验中,将球谐分析公式推导得到的球谐系数vnm(k)与全向麦克风阵列采集的球谐系数fnm(k)数值相比较,验证高阶扬声器搜集球谐项分量的准确性,计算两种方法的声场Cv(x;k)和Cf(x;k),观察声场的相似性,验证球面分配全向麦克风阵列搜集高阶球谐项分量的可行性。
分别以三阶1000Hz球面波产生声场为例,球谐系数共有16个,给定声源方向y[π/3,π/3,1],计算vnm(k)和声场Cv(x;k),用26个全向麦克风分布在半径为0.04m的球面上,搜集fnm(k),并计算Cf(x;k)。
实验结果为,vnm(k)和fnm(k)各阶对应的数值相近,分别计算Cv(x;k)和Cf(x;k),并画出声场图如图3,球面波频率为1000Hz时,fnm(k)对应的搜集的三阶声场与真实的三阶声场几乎完全一样,验证了球面分配的全向麦克风系统能够高保真地搜集高阶球谐项分量,再根据得到的球谐系数通过高阶环境立体混合声技术能够实现声场的精确重构。
图3为1kHz球面波对应的真实三阶声场和全向麦克风阵列搜集的三阶声场,两者基本一致,验证了全向麦克风阵列能精确搜集理想立体声场球谐项分量,说明了球面分配的匹配点对整个三维重构声场具有很好的保持作用。
根据立体声场搜集阶段的结果,可以推导出:一是球面分配的全向麦克风对应位置的匹配点,呈轴向正交分布,无冗余,应用到数据匹配立体声场重构方法中可以构建线性无相关方程组,矩阵逆可求,能够得到全局最优解;二是基于球面分配的全向麦克风对理想立体声场的的精确搜集和数据匹配立体声场重构方法的数学原理,球面均匀分配的匹配点能够很好的保持重构区域的声压数据。在立体声场重构阶段,根据实验结果对比分析基于球面分配的数据匹配立体声场重构方法与基于网格分配的数据匹配立体声场重构方法的性能,验证上述推倒。
三、立体声场重构阶段
立体声场重构阶段的主要目的在于:
一是已知重构区域求半径,探索匹配点分配最佳球半径与重构区域球半径之间的关系,并根据既定的匹配点分配密度确定球面分配匹配点数目的计算方法。
二是实验验证基于球面分配的数据匹配立体声场重构方法的可行性,并与基于网格分配的数据匹配立体声场重构方法的重构效果进行对比,分析重构误差曲线,分析重构声场与理想立体声场的近似程度。
球面分配匹配点配置规则:
基于网格分配的数据匹配立体声场重构方法中,匹配点选取具有较大的盲目性,为保证声场重构的效果,如果让匹配点尽可能的充满重构区域,无疑导致了计算量的增大。在球面分配样本点选取中,匹配点数目及分布的球半径同样也没有明确的规则。因此,本发明先找到匹配点分配的最佳球半径与重构区域半径之间的关系,然后根据匹配点的分配密度确定匹配点的数目。
(1)匹配点分配的最佳球半径与重构区域球半径的关系。
为更好的观察重构区域球半径大小与匹配点分配球半径大小的关系对声场重构误差的影响,选取环境立体混合声的36-和49-扬声器阵列,由于采用环境立体混合声技术重构声场时扬声器阵列要严格满足球面分配的几何特点,由重建区域半径x0与环境立体混合声阶数N之间的关系,分别得到重构半径rmax为0.272m和0.326m,选取足够多的球面分配匹配点,球面分配匹配点的个数设置为144个,设置分配球半径增长间隔为0.02m,分别让重构半径rmax从0.01m增加到0.272m和0.326m,每循环一次计算一次样本点分布在半径球赤道面的平均重构误差,并保存当前半径和平均误差值,用于后面画图观察误差最小时对应的半径,即为要找的最佳分配半径。
根据环境立体混合声的36-和49-扬声器阵列的重构平均误差随半径变化的曲线,取误差最小时对应的半径值,36-扬声器阵列点分布对应0.16m,49-扬声器阵列点分布对应0.20m,计算最佳样本点分配半径与重构区域球半径的比值。
u1=0.16/0.272=58.8%;u2=0.20/0.326=61.3%
取二者的平均值,比例系数为0.60,归纳出匹配点最佳分配球半径与重构区域球半径的关系
rbest=0.60rmax。
(2)球面分配匹配点个数的计算方法
给定重构区域球半径,根据匹配点分配的最佳球半径与重构区域球半径的关系,可确定匹配点分配的最佳球半径。但球面分配匹配点个数的确定只依赖于重构区域中匹配点的密度,随着匹配点数量增多,重构误差趋于稳定,为了避免计算量过大,需要确定适当的匹配点数目。
已知重构区域求半径rmax,在匹配点网格化选取方案的做法是先在xoy平面划分网格,将匹配点分配在横线与竖线交点上。WFS重构技术中,根据惠更斯原理,足够离散的扬声器可近似表达基尔霍夫积分定理公式,理想的波场合成效果需要扬声器组按照至少小于最高频率的半波长,例如20KHz对应8.5mm,所以规定相邻的横线或竖线的间隔w要小于信号中最高频率zmax声波信号波长的1/2,为保证重构误差的稳定性,选取更加密集的匹配点,将规定相邻的横线或竖线的间隔w选为信号中最高频率zmax声波信号波长的1/4,即w=c/(4zmax),设置匹配点密度能够很好地确定单层匹配点数目为:
c为声速,符号 表示取大于或者等于指定表达式的最小整数,z轴划分间隔为0.01,且范围为[0.1rmax,0.1rmax],得到纵向匹配点层数为Nportrait=20rmax+1,则总的点数为Ngrid=NportraitNxoy,由于匹配点最佳分配球半径仅为重构区域球半径的0.60,若将网格分配的匹配点直接应用于球面分配会导致球面匹配点过密,需要减少匹配点数目来减小匹配点分配密度,给定的匹配点密度,计算出球面分布匹配点数目为同条件下网格化匹配点数目的1/2,即Nround=Ngrid/2,若网格分配匹配点个数为Ngrid=520,那么求得球面分配匹配点个数为260,考虑到球面分配匹配点个数为一个数的平方,最终设置为Nround=16
(3)实验结果对比
根据本发明的球面分配匹配点配置规则,以分布在半径为2米的球面上的NHK22.2多声道立体声系统为扬声器配置环境,1000Hz球面波声源位置y=[π/3,π/3,2],重构区域选为以坐标原点为球心,半径为0.3米的球区域,网格分配匹配点,选取点数为448个,xoy平面样本点分布点数为64个,如图4(a),该情况下能够保持立体声场重构失真较小且趋势稳定。根据本发明球面分配匹配点配置规则,计算得到选取样本点数目为225个,分布在球半径为重构区域球半径的1/2,即0.15m,如图4(b)。
图4为网格匹配点分配图和球面匹配点分配图,225个点球面分配的面密度与448个点网格分配的体密度相当。
基于以上实验配置,分别画出网格分配法和球面分配法赤道面的声场图,对比发现两种方法都能很好地恢复理想立体声场,球面分配重构得到的立体声场更加均匀和清晰,更接近理想立体声场。
根据网格匹配法不同数目网格分配的样本点对应的重构误差曲线,匹配点总数为180时,随着重构区域半径的增大,重构误差变化幅度较大,充分说明了在匹配点数较少时,数据欠拟合严重,根本无法得到全局最优解,随着匹配点数目的增加重构误差变化趋势一致,且逐渐趋于稳定。数据匹配的声场重构必须基于大量的匹配点声压数据,但是xoy平面匹配点数目的选取并没有可靠的指导标准,当匹配点数目足够多时,重构误差才趋于稳定,为了避免匹配点数目过少而导致无法得到全局最优解的问题,现有技术根据经验选取足够多的匹配点,这无疑导致了计算量和计算复杂度的大幅增加,在实际应用对硬件设备的计算能力要求过高,速度过慢。
再从重构误差曲线进一步分析两种方法的效果,高度分别在-0.03米,0米,0.03米切片的误差曲线显示,球面分配法对应的立体声场重构误差在重构区域内均保持较低的失真,尤其在半径为0.25米的区域内误差小于期望保持误差4.5%,将球面分配匹配点应用到数据匹配的立体声场重构技术中,能够获得令人满意的重构效果:匹配点数目比网格化分方法减少56.2%,重构平均误差降低44.3%。
网格分配法匹配点在z轴的分布只有-0.03米到0.03米的范围,根据最小平方数据拟合原理,纵向范围一旦超出0.03米,失真将非常明显,随着重构区域半径的增大,重构误差均大于4.5%,最大达到7.8%,人耳系统已经能够明显感知立体声场失真,球面分配法能保持在z轴±0.055米空间区域内误差小于4.5%,证明了球面分配法在较大区域范围内保持了立体声场的精确重构,即使听众局部快速转动头部都不会对听音效果产生大的影响,球面分配法的匹配点分配在半径为0.16米的球面上,能够精确重构半径为0.32米的球区域,不仅精确重构匹配点包围区域立体声场,对匹配点分配球面以外立体声场也能很好保持,充分说明了基于球谐正交理论得到的匹配点应用于数据匹配立体声场重构方法是完全可行和高效的。
一种球面分配引导的数据匹配立体声场重构方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


动态评分
0.0