










专利摘要
本发明属于管道机器人领域,尤其涉及一种管道内封堵机器人,包括中心管、左挡板、右挡板、支撑套和橡胶囊,中心管的一端连接有液压管,液压管的末端连接有截止阀,另一端固定连接在右挡板的中央,中心管的轴线与右挡板垂直,所述左挡板和支撑套均套装在中心管上,支撑套夹在左挡板和右挡板之间,所述橡胶囊套在支撑套的外侧,橡胶囊的两端分别与左挡板和右挡板贴合,所述支撑套内安装有可径向滑动的活塞,所述左挡板和右挡板上均安装有支撑轮架,支撑轮架在扭转弹簧的作用下保持向管道内壁靠近的运动趋势,支撑轮架的末端安装有支撑轮。本发明通过对现有的管道内封堵机器人进行优化设计,大幅简化了管道内封堵机器人的结构。
权利要求
1.一种管道内封堵机器人,其特征在于:包括中心管(14)、左挡板(5)、右挡板(15)、支撑套(10)和橡胶囊(6),中心管(14)的一端连接有液压管(2),液压管(2)的末端连接有截止阀(1),中心管(14)的另一端固定连接在右挡板(15)的中央,中心管(14)的轴线与右挡板(15)垂直,所述左挡板(5)和支撑套(10)均套装在中心管(14)上,支撑套(10)夹在左挡板(5)和右挡板(15)之间,所述橡胶囊(6)套在支撑套(10)的外侧,橡胶囊(6)的两端分别与左挡板(5)和右挡板(15)贴合,所述支撑套(10)内安装有可径向滑动的活塞(11),活塞(11)的一侧通过孔道与橡胶囊(6)的内部空间连通,活塞(11)的另一侧通过孔道与中心管(14)的内部空间连通;
所述左挡板(5)和右挡板(15)上均安装有支撑轮架(4),其中,位于左挡板(5)上的一个支撑轮架(4)固定连接在左挡板(5)上,其余所有支撑轮架(4)铰接在左挡板(5)或右挡板(15)上,并且铰接处设置有扭转弹簧,支撑轮架(4)在扭转弹簧的作用下保持向管道内壁靠近的运动趋势,支撑轮架(4)的末端安装有支撑轮(3);
所述左挡板(5)的外侧安装有动力机(12),动力机(12)的输出轴与固定连接在左挡板(5)上的支撑轮架(4)上的支撑轮(3)之间通过带传动机构连接,且此处的支撑轮(3)为充气橡胶轮;
所述活塞朝向所述橡胶囊的一侧以及橡胶囊的内部空间均填充有硅脂。
2.根据权利要求1所述的一种管道内封堵机器人,其特征在于:所述橡胶囊(6)的外壁为弧形。
3.根据权利要求1所述的一种管道内封堵机器人,其特征在于:所述橡胶囊(6)的内壁内设置有起加强作用的圆筒(13)。
4.根据权利要求1所述的一种管道内封堵机器人,其特征在于:所述左挡板(5)和右挡板(15)内均设置有径向通孔(9),径向通孔(9)内插装有活塞杆(8),活塞杆(8)的外端连接有锚爪(7)。
5.根据权利要求1所述的一种管道内封堵机器人,其特征在于:所述液压管(2)为橡胶软管。
6.根据权利要求1所述的一种管道内封堵机器人,其特征在于:所述的动力机(12)为电机。
7.根据权利要求1所述的一种管道内封堵机器人,其特征在于:所述的动力机为液压马达。
说明书
技术领域
本发明属于管道机器人领域,尤其涉及一种管道内封堵机器人。
背景技术
目前,管道作为一种重要的物料输送设施,在工业中得到了广泛应用,管道运输作为综合运输体系的重要组成方式,在国民经济中发挥着重要的地位。随着管道服役年限的延长,由于外界工程作业的破坏、管内介质的腐蚀、以及自然因素的干扰,管道总会出现裂纹、漏洞等一些损坏迹象,从而导致管道内部介质外泄。维修管道时,往往需要对管道内进行封堵,常用的封堵方式有两种:一种是在管道内塞入橡胶气囊,通过向气囊内充气使气囊胀起,气囊的外壁贴合在管道的内壁上,从而实现管道的封堵,这种方式的优点是结构简单,缺点是封堵后承压能力差,无法进入管道深处,对使用环境的适应性较差;另一种方式是使用管道内封堵机器人,例如专利号为CN201910609513.5的专利申请文件中公开的一种管道机器人内封堵系统,专利号为CN201910171019.5的专利申请文件中公开的刹车式管道内智能封堵机器人,专利号为CN201910170928.7的专利申请文件中公开的一种管道内智能封堵机器人等等。与气囊封堵的方式相比,采用管道机器人封堵时,封堵处的承压能力有所提高,并且可以对管道深处进行封堵。但是,现有的管道封堵机器人结构非常复杂,很多施工单位难以承受,另外,封堵处的承压能力最多只能维持在5MPa以内,很多场合难以应用,因此,有必要设计一种新型的管道内封堵机器人。
发明内容
本发明提供一种管道内封堵机器人,以解决上述背景技术中提出的问题。
本发明所解决的技术问题采用以下技术方案来实现:本发明提供了一种管道内封堵机器人,包括中心管、左挡板、右挡板、支撑套和橡胶囊,中心管的一端连接有液压管,液压管的末端连接有截止阀,另一端固定连接在右挡板的中央,中心管的轴线与右挡板垂直,所述左挡板和支撑套均套装在中心管上,支撑套夹在左挡板和右挡板之间,所述橡胶囊套在支撑套的外侧,橡胶囊的两端分别与左挡板和右挡板贴合,所述支撑套内安装有可径向滑动的活塞,活塞的一侧通过孔道与橡胶囊的内部空间连通,活塞的另一侧通过孔道与中心管的内部空间连通;
所述左挡板和右挡板上均安装有支撑轮架,其中,位于左挡板上的一个支撑轮架固定连接在左挡板上,其余所有支撑轮架铰接在左挡板或右挡板上,并且铰接处设置有扭转弹簧,支撑轮架在扭转弹簧的作用下保持向管道内壁靠近的运动趋势,支撑轮架的末端安装有支撑轮;
所述左挡板的外侧安装有动力机,动力机的输出轴与固定连接在左挡板上的支撑轮架上的支撑轮之间通过带传动机构连接,且此处的支撑轮为充气橡胶轮;
所述活塞朝向所述橡胶囊的一侧以及橡胶囊的内部空间均填充有硅脂。
作为进一步的技术方案,所述橡胶囊的外壁为弧形。
作为进一步的技术方案,所述橡胶囊的内壁内设置有起加强作用的圆筒。
作为进一步的技术方案,所述左挡板和右挡板内均设置有径向通孔,径向通孔内插装有活塞杆,活塞杆的外端连接有锚爪。
作为进一步的技术方案,所述液压管为橡胶软管。
作为进一步的技术方案,所述的动力机为电机。
作为进一步的技术方案,所述的动力机为液压马达。
本发明的有益效果为:本发明通过对现有的管道内封堵机器人进行优化设计,大幅简化了管道内封堵机器人的结构,采用本发明后,封堵处的承压能力大幅增强,可达到20MPa以上,极大地增加了管道内封堵机器人的适用范围,使现有技术中无法通过管道机器人解决的技术问题有了新的解决方式。
附图说明
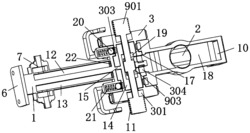
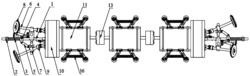
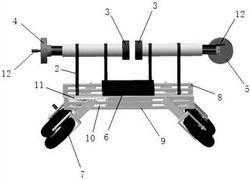
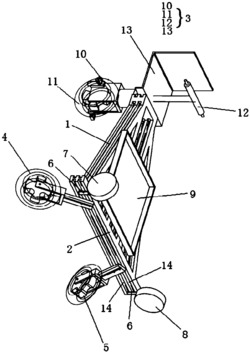
图1是本发明的结构示意图;
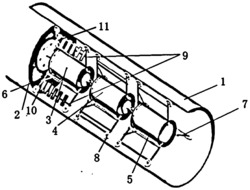
图2是图1中A处的局部放大图;
图3是图1中橡胶囊的纵向剖面图。
图中:1-截止阀,2-液压管,3-支撑轮,4-支撑轮架,5-左挡板,6-橡胶囊,7-锚爪,8-活塞杆,9-径向通孔,10-支撑套,11-活塞,12-动力机,13-圆筒,14-中心管,15-右挡板,16-间隔部,17-小活塞。
具体实施方式
以下结合附图对本发明做进一步描述:
本实施例包括中心管14、左挡板5、右挡板15、支撑套10和橡胶囊6,中心管14的一端连接有液压管2,液压管2的末端连接有截止阀1,中心管14的另一端固定连接在右挡板15的中央,中心管14的轴线与右挡板15垂直,所述左挡板5和支撑套10均套装在中心管14上,支撑套10夹在左挡板5和右挡板15之间,所述橡胶囊6套在支撑套10的外侧,橡胶囊6的两端分别与左挡板5和右挡板15贴合,所述支撑套10内安装有可径向滑动的活塞11,活塞11的一侧通过孔道与橡胶囊6的内部空间连通,活塞11的另一侧通过孔道与中心管14的内部空间连通,所述活塞朝向所述橡胶囊的一侧以及橡胶囊的内部空间均填充有硅脂。
封堵时,打开截止阀1,使用通用的液压泵,通过液压管向中心管14内打压,活塞11在压力作用下滑动,继而使橡胶囊6向外胀起,实现封堵。与现有的气囊方式相比,这种液压密封的方式承压能力可达20Mpa以上。
所述左挡板5和右挡板15上均安装有支撑轮架4,其中,位于左挡板5上的一个支撑轮架4固定连接在左挡板5上,其余所有支撑轮架4铰接在左挡板5或右挡板15上,并且铰接处设置有扭转弹簧,支撑轮架4在扭转弹簧的作用下保持向管道内壁靠近的运动趋势,支撑轮架4的末端安装有支撑轮3。所述左挡板5的外侧安装有动力机12,动力机12的输出轴与固定连接在左挡板5上的支撑轮架4上的支撑轮3之间通过带传动机构连接,且此处的支撑轮3为充气橡胶轮。通过动力机12驱动其中一个支撑轮3,旋转,可使本发明在管道内实现自主移动,以便于到达管道的更深处。支撑轮架4在扭转弹簧的作用下保持向管道内壁靠近的运动趋势,可使支撑架4具备一定柔性,从而增强本发明的通过性。
作为进一步的技术方案,所述橡胶囊6的外壁为弧形,有利于橡胶囊6的外壁与管道内壁更好地贴合。
作为进一步的技术方案,所述橡胶囊6的内壁内设置有起加强作用的圆筒13,防止橡胶囊6内部承压后变形过大,使密封失效。
作为进一步的技术方案,所述左挡板5和右挡板15内均设置有径向通孔9,径向通孔9内插装有活塞杆8,活塞杆8的外端连接有锚爪7。中心管14内打压后,活塞杆8向外滑动,使锚爪7在高压作用下抵在管道内壁上,防止本发明承受管道内压力后沿管壁滑动,从而有效提高封堵处的承压能力。
所述液压管2为橡胶软管。所述的动力机12为电机,采用电机时需要设置供电电缆,现有技术中的管道机器人大多设置有供电电缆,故在此不再赘述。
与现有技术不同的是,本发明中,所述的动力机12还可采用液压马达,液压马达的液压源来自于液压管2。
如图3所示,作为进一步的技术方案,还可在橡胶囊6内设置间隔部16,间隔部16与橡胶囊6的主体部分均采用橡胶一体成型,间隔部16将橡胶囊6的内部空间分隔成与所述活塞11数量相等且一一对应的多个独立小空间,一个活塞11为一个独立小空间加压,各空间内压力几乎互不干扰,可进一步增加管道封堵处的承压能力。
作为进一步的技术方案,还可在中心管14内设置两个小活塞17,两个小活塞17分别设置在中心管14上与活塞11的连通孔的两侧,从而将用于驱动活塞14和两组活塞杆8的带压液体隔离,从而在某一位置出现密封失效后,其他部分仍能正常工作。需要注意的是,要想达到设计目的,小活塞17的需要进行轴向限位,从而放置其隔离作用解除。
综上所述,本发明通过对现有的管道内封堵机器人进行优化设计,大幅简化了管道内封堵机器人的结构,采用本发明后,封堵处的承压能力大幅增强,可达到20MPa以上,极大地增加了管道内封堵机器人的适用范围,使现有技术中无法通过管道机器人解决的技术问题有了新的解决方式。
一种管道内封堵机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0