






专利摘要
本发明涉及一种基于输出反馈控制器的超声波电机伺服控制方法,包括以下步骤:步骤S1:提供一基座以及设于基座上的超声波电机,所述超声波电机一侧输出轴与一光电编码器相连接,另一侧输出轴与一飞轮惯性负载相连接,所述飞轮惯性负载的输出轴经联轴器与一力矩传感器相连接,所述光电编码器的信号输出端、所述力矩传感器的信号输出端分别接至一控制系统;步骤S2:所述控制系统建立在输出反馈控制的基础上,在控制器上以Lyapunov函数为其调整函数,用以获得更好的控制效能。该控制系统由反馈控制器和电机组成,整个控制器的系统建立在反馈计算的基础上,从而能获得更好的控制效能。该装置及其控制方不仅控制准确度高,而且结构简单、紧凑,使用效果好。
权利要求
1.一种基于输出反馈控制器的超声波电机伺服控制方法,其特征在于:包括以下步骤:
步骤S1:提供一基座以及设于基座上的超声波电机,所述超声波电机一侧输出轴与一光电编码器相连接,另一侧输出轴与一飞轮惯性负载相连接,所述飞轮惯性负载的输出轴经联轴器与一力矩传感器相连接,所述光电编码器的信号输出端、所述力矩传感器的信号输出端分别接至一控制系统;
步骤S2:所述控制系统建立在输出反馈控制的基础上,在控制器上以Lyapunov函数为其调整函数,用以获得更好的控制效能;所述控制系统的动态方程为:
其中Ap=-B/J,BP=J/Kt>0,CP=-1/J;B为阻尼系数,J为转动惯量,Kt为电流因子,Tf(v)为摩擦阻力力矩,TL为负载力矩,U(t)是电机的输出力矩,θr(t)为通过光电编码器测量得到的位置信号。
2.根据权利要求1所述的一种基于输出反馈控制器的超声波电机伺服控制方法,其特征在于:所述步骤S1中,控制系统包括一超声波电机驱动控制电路,所述超声波电机驱动控制电路包括控制芯片电路和驱动芯片电路,所述光电编码器的信号输出端与所述控制芯片电路的相应输入端相连接,所述控制芯片电路的输出端与所述驱动芯片电路的相应输入端相连接,以驱动所述驱动芯片电路,所述驱动芯片电路的驱动频率调节信号输出端和驱动半桥电路调节信号输出端分别与所述超声波电机的相应输入端相连接,所述控制器设于所述控制芯片电路中。
3.根据权利要求1所述的一种基于输出反馈控制器的超声波电机伺服控制方法,其特征在于:所述步骤S1中,所述联轴器为弹性联轴器。
4.根据权利要求1所述的一种基于输出反馈控制器的超声波电机伺服控制方法,其特征在于:所述步骤S1中,所述超声波电机、光电编码器、力矩传感器分别经超声波电机固定支架、光电编码器固定支架、力矩传感器固定支架固定于所述基座上。
5.根据权利要求1所述的一种基于输出反馈控制器的超声波电机伺服控制方法,其特征在于:所述步骤S2中,若控制系统的参数都是已知的,外力干扰、交叉耦合干扰和摩擦力都是不存在的,则电机的标准模型为下式所示:
其中,An为Ap之标准值,Bn为BP之标准值;
若控制系统的参数值偏离了标准值或是系统出现了外力干扰,交叉耦合干扰和摩擦力矩等,此时控制系统的动态方程修改成:
其中,Cn为CP之标准值,ΔA,ΔB、ΔC代表微小变化量,D(t)为总集不确定项,定义为:
因此将总集不确定项的边界假设为已知,如|D(t)|≤ρ,ρ为一个给定的正常数项,为了避免电机中出现不可预期的不确定项,则使用反馈控制对系统进行伺服控制;
非线性系统动力学重新表示成:
上式ai为未知常数和控制增益参数,Yi是已知的连续性或非线性函数,w是控制输入,x1(t)=x(t),xn=x(n-1),a=[-a1,a2,…,-am]T,Y=[Y1,Y2,…,Ym]T; 表示有界的外部干扰, u0、w0为u、w的初始值,u为回滞系统的输出,d(t)的影响是由于bd1(w(t))产生的外部干扰,称之为扰动项;
输出y:
其中,
采用的滤波器为如下方程所示:
其中,k=[k1,…,kn]T,使得矩阵 的所有特征值位于给定的稳定位置;利用滤波器,状态估计误差 满足:
其中,
则控制系统表示为:
因此:
Θ=[bm,…,b0,θT]T
vi,2,ε2,ξ2分别表示vi,ε,ξ的第二项,它的所有状态用于反馈;
则控制器通过遵循下面的设计步骤来实现,其中ci,i=1,…,ρ是正设计参数, 是Θ的估计, 是 和 是待设计的正常数,并且Θ0是正的常数;
在自适应控制设计中使用输出反馈来实现控制目标,先进行坐标变换:
z1=y-yr
(18)
其中y为实际输出,yr为给定的运动轨迹方程, bm=amc,c为常数,m是方程(5)的阶数,αi-1是第i个虚拟控制步骤;
参数更新规律为:
进一步参数更新规律为:
调整函数为:
根据上述公式,则该控制过程是稳定的,满足zi(i=1,2,…n)→0,则 因此该系统通过使用输出反馈算法来控制电机转子的旋转角度,再通过计算转子的旋转角度间接控制电机的速度。
说明书
技术领域
本发明涉及电机控制器领域,特别是涉及一种基于输出反馈控制器的超声波电机伺服控制方法。
背景技术
现有的超声波电机伺服控制系统的设计中有对于输出信号的检测误差,这可能会导致控制变量的估计误差。为了避免这种情况,我们现在提出反馈自适应控制方案。此控制系统能有效的增进系统的控制效能,并进一步减少系统对于不确定性的影响程度。因此电机的位置与速度控制可以获得较好的动态特性。
发明内容
有鉴于此,本发明的目的是提供一种基于输出反馈控制器的超声波电机伺服控制方法,不仅控制准确度高,而且该方法采样的装置结构简单、紧凑,使用效果好。
本发明采用以下方案实现:一种基于输出反馈控制器的超声波电机伺服控制方法,其特征在于:包括以下步骤:
步骤S1:提供一基座以及设于基座上的超声波电机,所述超声波电机一侧输出轴与一光电编码器相连接,另一侧输出轴与一飞轮惯性负载相连接,所述飞轮惯性负载的输出轴经联轴器与一力矩传感器相连接,所述光电编码器的信号输出端、所述力矩传感器的信号输出端分别接至一控制系统;
步骤S2:所述控制系统建立在输出反馈控制的基础上,在控制器上以Lyapunov函数为其调整函数,用以获得更好的控制效能;所述控制系统的动态方程为:
其中Ap=-B/J,BP=J/Kt>0,CP=-1/J;B为阻尼系数,J为转动惯量,Kt为电流因子,Tf(v)为摩擦阻力力矩,TL为负载力矩,U(t)是电机的输出力矩,θr(t)为通过光电编码器测量得到的位置信号。
进一步地,所述步骤S1中,控制系统包括一超声波电机驱动控制电路,所述超声波电机驱动控制电路包括控制芯片电路和驱动芯片电路,所述光电编码器的信号输出端与所述控制芯片电路的相应输入端相连接,所述控制芯片电路的输出端与所述驱动芯片电路的相应输入端相连接,以驱动所述驱动芯片电路,所述驱动芯片电路的驱动频率调节信号输出端和驱动半桥电路调节信号输出端分别与所述超声波电机的相应输入端相连接,所述控制器设于所述控制芯片电路中。
进一步的,所述联轴器为弹性联轴器。
进一步的,所述超声波电机、光电编码器、力矩传感器分别经超声波电机固定支架、光电编码器固定支架、力矩传感器固定支架固定于所述基座上。
进一步地,所述步骤S2中,若控制系统的参数都是已知的,外力干扰、交叉耦合干扰和摩擦力都是不存在的,则电机的标准模型为下式所示:
其中,An为Ap之标准值,Bn为BP之标准值;
假如产生不确定项,如若控制系统的参数值偏离了标准值或是系统出现了外力干扰,交叉耦合干扰和摩擦力矩等,此时控制系统的动态方程修改成:
其中,Cn为CP之标准值,ΔA,ΔB、ΔC代表微小变化量,D(t)为总集不确定项,定义为:
因此将总集不确定项的边界假设为已知,如|D(t)|≤ρ,ρ为一个给定的正常数项,为了避免电机中出现不可预期的不确定项,则使用反馈控制对系统进行伺服控制;
非线性系统动力学重新表示成:
上式ai为未知常数和控制增益参数,Yi是已知的连续性或非线性函数,w是控制输入,x1(t)=x(t),xn=x(n-1),a=[-a1,a2,…,-am]T,Y=[Y1,Y2,…,Ym]T; 表示有界的外部干扰, u0、w0为u、w的初始值,u为回滞系统的输出,d(t)的影响是由于bd1(w(t))产生的外部干扰,称之为扰动项;
输出y:
其中,
采用的滤波器为如下方程所示:
其中,k=[k1,…,kn]T,使得矩阵 的所有特征值位于给定的稳定位置;利用滤波器,状态估计误差 满足:
其中,
则控制系统表示为:
因此:
Θ=[bm,…,b0,θT]T
vi,2,ε2,ξ2分别表示vi,ε,ξ的第二项,它的所有状态用于反馈;
则控制器通过遵循下面的设计步骤来实现,其中ci,i=1,…,ρ是正设计参数, 是Θ的估计, 是 和 是待设计的正常数,并且Θ0是正的常数;
在自适应控制设计中使用输出反馈来实现控制目标,先进行坐标变换:
z1=y-yr
(18)
其中y为实际输出,yr为给定的运动轨迹方程, bm=amc,c为常数,m是方程(5)的阶数,αi-1是第i个虚拟控制步骤;
参数更新规律为:
进一步参数更新规律为:
调整函数为:
根据上述公式,则该控制过程是稳定的,满足zi(i=1,2,…n)→0,则 因此该系统通过使用输出反馈算法来控制电机转子的旋转角度,再通过计算转子的旋转角度间接控制电机的速度。
相较于现有技术,本发明具有以下有益效果:由于传统反步控制器有不连续函数参与控制,这可能会导致颤振。为了减少颤振的发生,本发明使用了改进算法有效的增进系统的控制效能,并进一步减少系统对于不确定性的影响程度,提高了控制的准确性,可以获得较好的动态特性。此外,该装置设计合理,结构简单、紧凑,制造成本低,具有很强的实用性和广阔的应用前景。
附图说明
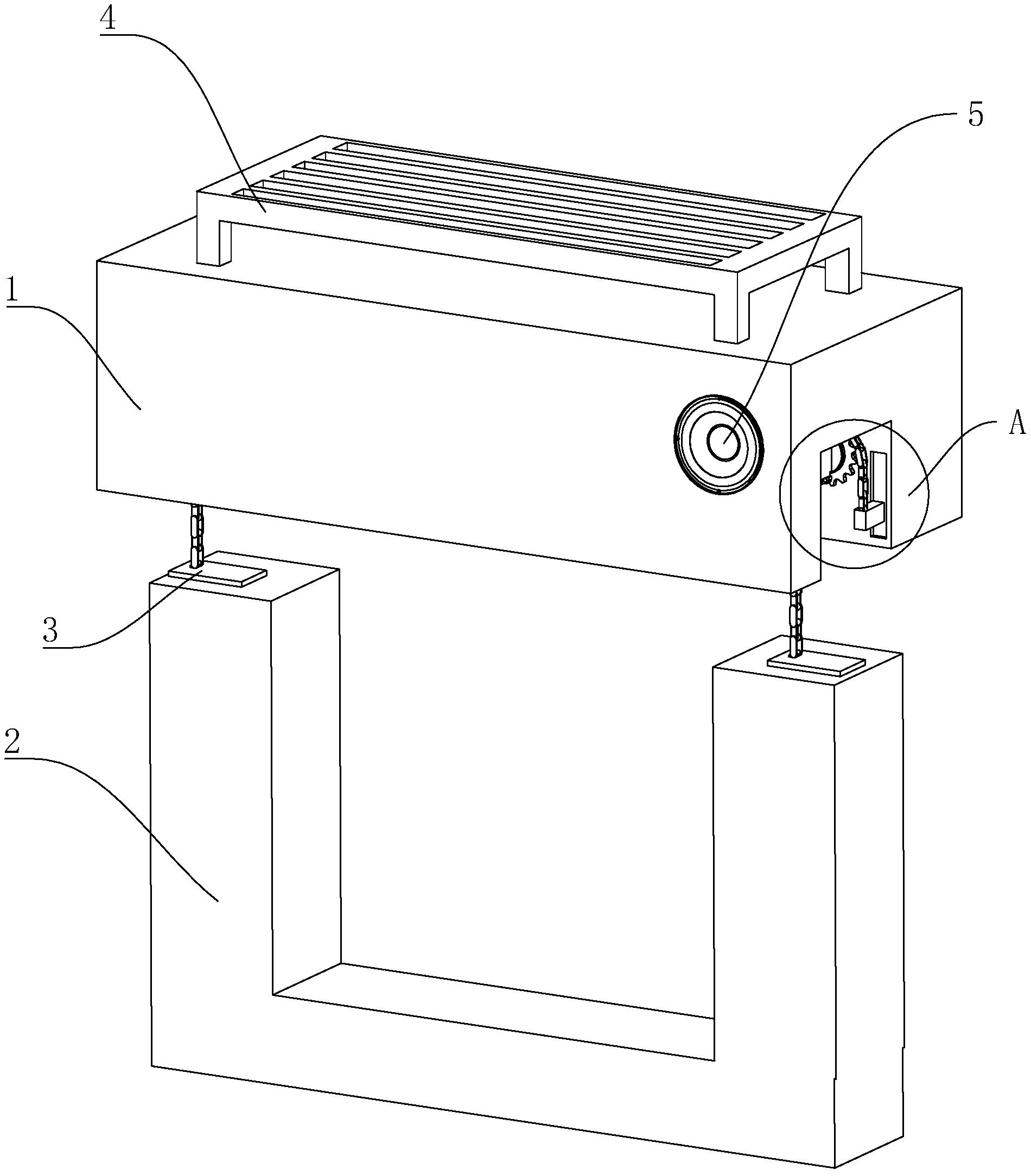
图1是本发明实施例的结构示意图。
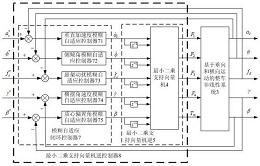
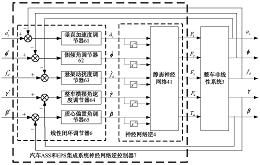
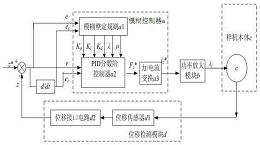
图2是本发明实施例的控制电路原理图。
图中,1-光电编码器,2-光电编码器固定支架,3-超声波电机输出轴,4-超声波电机,5-超声波电机固定支架,6-超声波电机输出轴,7-飞轮惯性负载,8-飞轮惯性负载输出轴,9-弹性联轴器,10-力矩传感器,11-力矩传感器固定支架,12-基座,13-控制芯片电路,14-驱动芯片电路,15、16、17-光电编码器输出的A、B、Z相信号,18、19、20、21-驱动芯片电路产生的驱动频率调节信号,22-驱动芯片电路产生的驱动半桥电路调节信号,23、24、25、26、27、28-控制芯片电路产生的驱动芯片电路的信号,29-超声波电机驱动控制电路。
具体实施方式
下面结合附图及实施例对本发明做进一步说明。
本实施例提供一种基于输出反馈控制器的超声波电机伺服控制方法,其特征在于:包括以下步骤:
步骤S1:如图1所示,提供一基座12和设于基座12上的超声波电机4,所述超声波电机4一侧输出轴3与光电编码器1相连接,另一侧输出轴6与飞轮惯性负载7相连接,所述飞轮惯性负载7的输出轴8经弹性联轴器9与力矩传感器10相连接,所述光电编码器1的信号输出端、所述力矩传感器10的信号输出端分别接至一控制系统;
步骤S2:所述控制系统建立在输出反馈控制的基础上,在控制器上以Lyapunov函数为其调整函数,用以获得更好的控制效能;所述控制系统的动态方程为:
其中Ap=-B/J,BP=J/Kt>0,CP=-1/J;B为阻尼系数,J为转动惯量,Kt为电流因子,Tf(v)为摩擦阻力力矩,TL为负载力矩,U(t)是电机的输出力矩,θr(t)为通过光电编码器测量得到的位置信号。
在本实施例中,所述步骤S1中,如图2所示,所述控制系统包括超声波电机驱动控制电路29,所述超声波电机驱动控制电路29包括控制芯片电路13和驱动芯片电路14,所述光电编码器1的信号输出端与所述控制芯片电路13的相应输入端相连接,所述控制芯片电路13的输出端与所述驱动芯片电路14的相应输入端相连接,以驱动所述驱动芯片电路14,所述驱动芯片电路14的驱动频率调节信号输出端和驱动半桥电路调节信号输出端分别与所述超声波电机4的相应输入端相连接。所述驱动芯片电路14产生驱动频率调节信号和驱动半桥电路调节信号,对超声波电机输出A、B两相PWM的频率、相位及通断进行控制。通过开通及关断PWM波的输出来控制超声波电机的启动和停止运行;通过调节输出的PWM波的频率及两相的相位差来调节电机的最佳运行状态。
在本实施例中,所述联轴器为弹性联轴器。
在本实施例中,所述超声波电机4、光电编码器1、力矩传感器10分别经超声波电机固定支架5、光电编码器固定支架2、力矩传感器固定支架11固定于所述基座12上。
在本实施例中,该控制方法中的控制系统由反步控制器和电机组成;为了避免电机中出现不可预期的不确定项,需要使用反步控制方法对系统进行控制:
现在先假设系统的参数都是已知的,外力干扰、交叉耦合干扰和摩擦力都是不存在的,则电机的标准模型为下式所示:
其中,An为Ap之标准值,Bn为BP之标准值。
假如产生不确定项(如系统参数值偏离了标准值或是系统出现了外力干扰,交叉耦合干扰和摩擦力矩等),此时控制系统的动态方程修改成:
其中,Cn为CP之标准值,ΔA,ΔB、ΔC代表微小变化量,D(t)为总集不确定项,定义为:
将总集不确定项的边界假设为已知,如|D(t)|≤ρ,ρ为一个给定的正常数项。为了避免电机中出现不可预期的不确定项,使用反馈控制对系统进行伺服控制。
非线性系统动力学可以重新表示成
上式ai为未知常数和控制增益参数,Yi是已知的连续性或非线性函数,w是控制输入,x1(t)=x(t),xn=x(n-1),a=[-a1,a2,…,-am]T,Y=[Y1,Y2,…,Ym]T。这些参数可以提供一定程度的自由来决定其适应性。 表示有界的外部干扰, u0、w0为u、w的初始值,u为回滞系统的输出。d(t)的影响是由于bd1(w(t))产生的外部干扰,称之为扰动项。
输出y:
其中
采用的滤波器为如下方程所示:
其中,k=[k1,…,kn]T,使得矩阵 的所有特征值位于给定的稳定位置。利用设计的滤波器,状态估计误差 满足:
其中,
那么系统可以表示为:
因此:
Θ=[bm,…,b0,θT]T
vi,2,ε2,ξ2分别表示vi,ε,ξ的第二项。它的所有状态可用于反馈。
控制器设计通过遵循下面的设计步骤来实现,其中ci,i=1,…,ρ是正设计参数, 是Θ的估计, 是 和 是待设计的正常数,并且Θ0是正的常数。
在自适应控制设计中使用输出反馈来实现控制目标,先进行坐标变换:
z1=y-yr
(18)
其中,y为实际输出,yr为给定的运动轨迹方程, bm=amc,c为常数。m是方程(5)的阶数,αi-1是第i个虚拟控制步骤。
参数更新规律为:
进一步参数更新规律为:
调整函数为:
可以证明上述过程是稳定的,满足zi(i=1,2,…n)→0,意味着
因此,该控制方法通过使用输出反馈算法来控制电机转子的旋转角度,再通过计算转子的旋转角度间接控制电机的速度。由李亚普诺夫稳定性定理获得反馈控制参数的强健性学习法则。当反馈自适应将使用来估测控制系统的输出项,用李亚普诺夫函数确保所设计的控制系统的稳定性。
以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
一种基于输出反馈控制器的超声波电机伺服控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0