









专利摘要
测取齿轮在各种运行状态下的振动信号x(n),对振动信号进行差分操作,获得振动信号x(n)的差分序列△x(n),利用DFA计算差分序列△x(n)的波动函数F(s),提取各种运行状态下的对数波动函数ln[F(s)]的最小值和最大值,将上述提取的最小值和最大值分别作为横纵坐标作图,利用最小二乘法将故障状态所对应的数据点拟合为一条“故障状态线”,以一定的置信水平(1-α)为“故障状态线”估计一个置信区间。随着齿轮运行状态的恶化,数据点逐渐靠近上述建立的置信区间,当数据点进入到置信区间时,可以认为该齿轮箱以一定的概率出现了故障并发出故障预警,这时要对齿轮箱的运行状态进行详细分析,必要时需要停机检修。
权利要求
1.一种齿轮早期故障检测方法,其特征在于,包括以下步骤:
(1)采集齿轮在各种典型故障状态下的振动信号x(n);
(2)对原始信号x(n)进行差分运算,得到原始信号x(n)的差分序列△x(n)
△x(n)=x(n+1)-x(n),n=1,…,N-1;
(3)利用去趋势波动分析(DFA)算法分析差分序列△x(n)的波动函数F(s);
(4)提取每种故障状态所对应的对数波动函数ln[F(s)]的最小值和最大值,将这两个参数作为原始信号x(n)的故障特征参数;
(5)将对数波动函数ln[F(s)]的最小值和最大值分别作为横纵坐标作图;
(6)采用最小二乘法将故障状态所对应的数据点拟合为一条直线,该直线被称为“故障状态线”;
(7)以一定的置信水平(1-α)为“故障状态线”估计一个置信区间;
(8)随着齿轮箱运行状态的恶化,数据点逐渐靠近上述建立的置信区间,当数据点进入到置信区间时,可以认为该齿轮箱以一定的概率出现了故障并发出故障预警,这时要对齿轮箱的运行状态进行详细分析,必要时需要停机检修。
2.根据权利要求1所述的一种齿轮早期故障检测方法,所述步骤(3)包括以下步骤:
①构造时间序列x(i)的去均值累差序列X(i):
, ;
②将累差序列X(i)等分为K段长度为s的不重叠的数据段,每段数据记为Xk(i)(k=1,2,…,K,i=1,2,…,s);
③采用最小二乘法分别拟合各段数据的多项式趋势,最后得到的总趋势记为Ts(i)(i=1,2,…,N);
④计算累差序列X(i)的均方值波动函数
⑤改变时间尺度s的大小,重复上述步骤①~④,如果时间序列x(i)具有长程相关性,则当时间尺度s在某个范围内变化时,波动函数F(s)与时间尺度s满足下面的标度律关系
上式中的参数α为时间序列x(i)的标度指数。
3.根据权利要求1所述的一种齿轮早期故障检测方法,所述步骤(7)包括以下步骤:由于拟合直线的斜率近似为1,因此拟合直线的位置仅与其截距有关,因此估计拟合直线的置信区间就相当于估计拟合直线截距的置信区间,使用符号b代表拟合直线的截距,假定b服从正态分布N(μ,σ2),根据参数区间估计理论,当样本方差σ2未知时,为了估计样本均值μ的置信区间,应该使用t统计量进行估计,即
, ,
那么,均值μ的一个置信水平为(1-α)的置信区间为
。
说明书
技术领域
本发明涉及旋转机械状态监测与故障诊断领域,具体涉及一种齿轮早期故障检测方法。
背景技术
齿轮是旋转机械的关键部件之一,在工业生产中得到了广泛应用,它的运行状况不仅影响其自身的运转,而且还会对相关的机械设备产生直接的影响。如果齿轮出现故障,轻则会影响机械设备的正常运行,重则会造成重大的经济损失,甚至出现毁机事故和人员伤亡。如果在齿轮的运行过程中,人们能够借助故障诊断技术及时发现潜在的故障隐患并进行有效的处理,那么不但能够有效地保证机械设备的安全运行,而且能够避免重大事故的发生。因此,加强对齿轮早期故障检测和诊断技术的研究具有重要的理论价值和工程应用价值。
齿轮箱通常具有复杂的结构,其故障信号不但包含着大量的噪声,而且通常具有非平稳和非线性特征。在这种情况下,传统的基于平稳性假设和线性理论的时域统计参数、相关分析、谱分析和时序模型等机械故障诊断方法难以满足实际工程的要求。在最近几十年,短时傅里叶变换、魏格纳分布、小波变换、经验模式分解、循环平稳分析、局部均值分解和本征时间尺度分解等非平稳信号分析方法在机械故障特征提取和诊断中得到了广泛的应用。然而,上述方法主要用于解决故障特征比较明显时的机械故障诊断问题,没有涉及齿轮的早期故障检测和诊断问题。当齿轮故障处于早期阶段时,由于故障特征非常微弱,故障特征参数的提取非常困难,因此齿轮的早期故障检测和诊断是一个难题。
目前国内外学者已经针对这个问题开展了一些研究,相继利用自适应随机共振方法、循环平稳分析方法、小波变换、信号稀疏分解方法和独立分量分析进行旋转机械的早期故障诊断。然而,上述方法总体上缺乏对旋转机械故障动态发展过程的分析,没有提出相应的旋转机械状态评估准则,没有建立可行的状态监测方法。鉴于现有技术的缺陷,有必要提出一种新的方法来解决齿轮的早期故障检测和诊断问题。
发明内容
本发明的目的在于克服现有技术的缺陷,提出一种齿轮早期故障检测方法。该方法以齿轮故障数据差分序列的波动参数作为故障特征参数,建立齿轮的“故障状态线”,然后通过考察齿轮的状态点与该“故障状态线”的相对位置来评估齿轮箱的运行状态。为了实现上述目的,本发明的技术方案如下。
首先利用加速度传感器测取齿轮在正常状态和各种典型故障状态下的振动信号x(n)。
对原始信号x(n)进行差分运算,得到原始信号x(n)的差分序列△x(n)。
△x(n)=x(n+1)-x(n),n=1,…,N-1。
利用去趋势波动分析(DFA)算法计算差分序列△x(n)的波动函数F(s)。
提取每种故障状态所对应的对数波动函数ln[F(s)]的最小值和最大值,将这两个参数作为原始信号x(n)的特征参数。
将对数波动函数ln[F(s)]的最小值和最大值分别作为横纵坐标作图。
采用最小二乘法将故障状态所对应的数据点拟合为一条直线,该直线被称为“故障状态线”。
以一定的置信水平(1-α)为“故障状态线”估计一个置信区间。
随着齿轮运行状态的恶化,数据点逐渐靠近上述建立的置信区间,当数据点进入到置信区间时,可以认为该齿轮以一定的概率出现了故障并发出故障预警,这时要对齿轮的运行状态进行详细分析,必要时需要停机检修。
本发明的核心是提取齿轮故障数据差分序列的波动函数对数值的最小值和最大值,然后将故障状态所对应的数据点拟合为一条“故障状态线”,接着以一定的置信水平(1-α)为“故障状态线”估计一个置信区间,当齿轮运行状态逐渐恶化时,其所对应的数据点会逐渐靠近这个置信区间,当数据点进入这个置信区间时,可以认为该齿轮以一定的概率出现了故障并发出故障预警,这时要对齿轮箱的运行状态进行详细分析,必要时需要停机检修。
附图说明
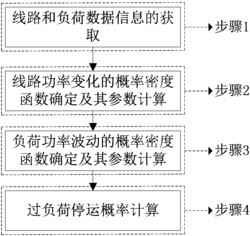
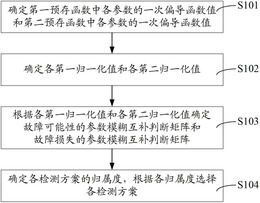
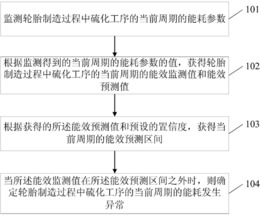
图1为本发明的流程图。
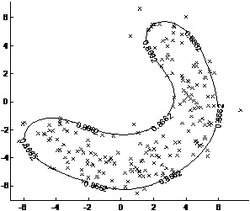
图2为“故障状态线”形成的仿真图。
图3为实例1四种齿轮振动信号图,(a)~(d)分别代表正常、轻度磨损、中度磨损和断齿振动信号。
图4为实例1齿轮状态监测过程图,上三角、下三角和左三角分别代表所添加噪声的幅值是正常状态信号幅值标准差的0.2、0.5和0.8倍。
图5为实例2四种齿轮振动信号图,(a)~(d)分别代表正常、轻度划痕、中度划痕和重度划痕信号。
图6为实例2齿轮状态监测过程图,上三角、下三角和左三角分别代表所添加噪声的幅值是正常状态信号幅值标准差的0.2、0.5和0.8倍。
具体实施方式
采集齿轮在各种运行状态下的振动信号x(n)。
对原始信号x(n)进行差分运算,得到原始信号x(n)的差分序列△x(n)。
△x(n)=x(n+1)-x(n),n=1,…,N-1。
利用去趋势波动分析(DFA)算法计算差分序列△x(n)的波动函数F(s)。
提取每种故障状态所对应的对数波动函数ln[F(s)]的最小值和最大值,将这两个参数作为原始信号x(n)的故障特征参数。
将对数波动函数ln[F(s)]的最小值和最大值分别作为横纵坐标作图。
采用最小二乘法将故障状态所对应的数据点拟合为一条直线,该直线被称为“故障状态线”。
以一定的置信水平(1-α)为“故障状态线”估计一个置信区间。
随着齿轮运行状态的恶化,数据点逐渐靠近上述建立的置信区间,当数据点进入到置信区间时,可以认为该齿轮以一定的概率出现了故障并发出故障预警,这时要对齿轮的运行状态进行详细分析,必要时需要停机检修。
为了证明本发明所述方法的正确性,给出一个仿真算例和两个具体实例进一步说明。
仿真算例
构建一个齿轮振动信号的模型来模拟齿轮故障的发展过程。一般来说,齿轮故障信号大体上包括两个部分:一部分是具有调幅调频特性的准周期信号,另一部分是噪声。由于调幅调频信号总是可以近似写成几个更简单的准周期信号和的形式,因此为了研究方便起见,这里使用一个简单的正弦信号来模拟这一部分。这样,齿轮振动信号可以简单地写成。
xn=sin[2πf(n-1)/fs]+a×stdvalue×WNn,n=1,2,3,…,N。
其中WNn代表幅值为1的白噪声,stdvalue代表正弦信号的幅值标准差,a代表白噪声的幅值系数,N代表数据的长度,设置f=100,fs=1000,N=10000。
通过调节白噪声的幅值系数a来模拟齿轮运行状态的恶化过程。按照图1所示的流程对仿真信号进行分析,结果如图2所示。从图2可以看出,随着仿真信号的信噪比越来越小,运行状态所对应的数据点逐渐形成一条直线,且运行状态越差数据点越靠近这条直线。
实施案例1
利用从齿轮箱实验台上测取的齿轮故障数据来验证本发明所述方法的实用性。该齿轮箱的主被动齿轮的齿数分别为24和29,主动齿轮转速为1420RPM,采样频率为16384Hz。在该齿轮箱上分别模拟了轻度磨损、中度磨损和断齿故障。利用本发明所述的方法对正常状态和上述三种故障状态下的齿轮箱振动信号进行分析,结果如图4所示。从图4可以看出,三种故障状态所对应的数据点可以近似拟合为一条“故障状态线”,而正常状态所对应的数据点则明显偏离这条直线。此外,由于齿轮的运行状态与信噪比有着密切的关系,一般来说,信噪比越低则齿轮的运行状态越差,因此可以通过向正常振动数据添加不同强度白噪声的方法来模拟齿轮运行状态的恶化过程。从图4可以看出,随着齿轮运行状态的恶化,数据点逐渐向“故障状态线”靠近,因此数据点与“故障状态线”之间的相对位置可以作为评估齿轮运行状态的标准。图4所示的虚线之间的区域为“故障状态线”的一个置信水平为95%的置信区间,当数据点进入到这个区间时,可以认为该齿轮箱以95%的可能性出现了故障,这时应该发出故障预警并对齿轮箱的运行状态进行详细分析,必要时需要停机检修。
实施案例2
在实验齿轮箱上制造不同严重程度的齿轮故障来模拟齿轮故障的演化过程。利用测取的齿轮故障数据来验证本发明所述方法的实用性。该齿轮箱的主被动齿轮的齿数分别为25和40,在主动齿轮上制造故障,主动齿轮转速为1600RPM。在该齿轮上分别模拟了轻度划痕、中度划痕和重度划痕故障。利用本发明所述的方法对正常状态和上述三种故障状态下的齿轮振动信号进行分析,结果如图6所示。从图6可以看出,三种故障状态所对应的数据点可以近似拟合为一条“故障状态线”,而正常状态所对应的数据点则明显偏离这条直线。此外,通过向正常振动数据添加不同强度白噪声的方法来模拟齿轮运行状态的恶化过程。从图6可以看出,随着齿轮运行状态的恶化,数据点逐渐向“故障状态线”靠近,因此数据点与“故障状态线”之间的相对位置可以作为评估齿轮运行状态的标准。图6所示的虚线之间的区域为“故障状态线”的一个置信水平为95%的置信区间,当数据点进入到这个区间时,可以认为该齿轮箱以95%的可能性出现了故障,这时应该发出故障预警并对齿轮箱的运行状态进行详细分析,必要时需要停机检修。
一种齿轮早期故障检测方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0