






专利摘要
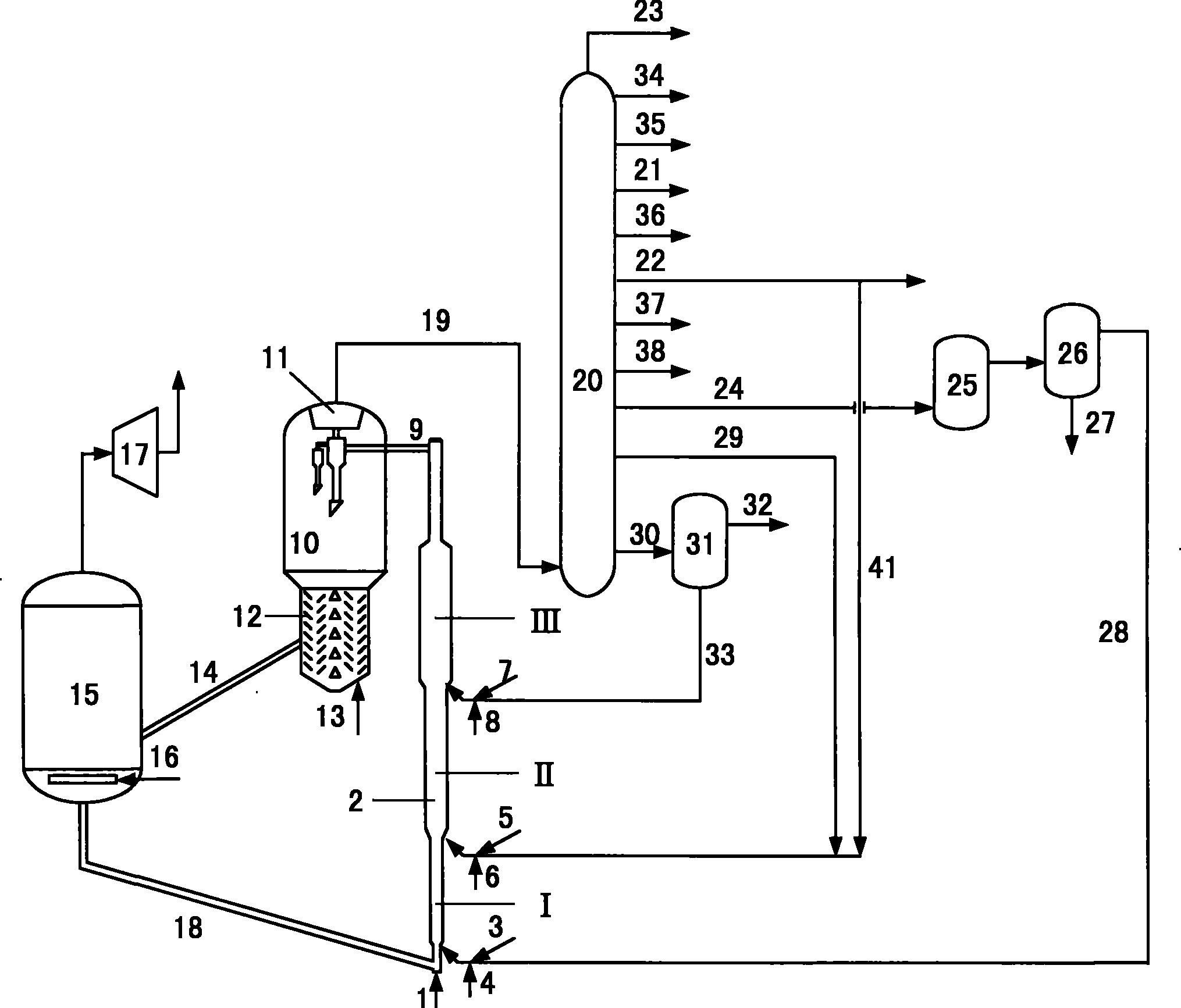
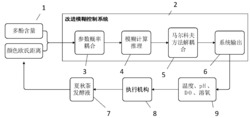
本发明涉及一种基于基底函数网络的超声波电机模糊神经网络控制方法,包括基座和设于其上的超声波电机,超声波电机一侧输出轴与光电编码器连接,另一侧输出轴与飞轮惯性负载连接,飞轮惯性负载的输出轴经联轴器与力矩传感器连接,光电编码器、力矩传感器的信号输出端分别接至控制系统。该控制系统由递归式放射性基底函数网络为基础的模糊神经网络控制器和电机组成,整个控制器的系统建立在递归式放射性基底函数网络上,以模糊神经网络为其调整函数,从而能获得更好的控制效能,不仅控制准确度高,而且结构简单、紧凑,使用效果好。
权利要求
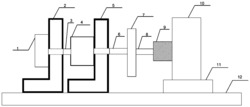
1.一种基于基底函数网络的超声波电机模糊神经网络控制方法,包括一基座以及设置于该基座上的超声波电机,其特征在于,所述超声波电机一侧输出轴与一光电编码器相连接,所述超声波电机另一侧输出轴与一飞轮惯性负载一端相连接;所述飞轮惯性负载的输出轴经一弹性联轴器与一力矩传感器相连接;所述光电编码器的信号输出端以及所述力矩传感器的信号输出端均连接至一控制系统;所述超声波电机、所述光电编码器以及所述力矩传感器分别对应经超声波电机固定支架、光电编码器固定支架以及力矩传感器固定支架固定于所述基座上;所述控制系统中的控制芯片电路通过采用基于递归式放射性基底函数网络的模糊神经网络控制器,并将模糊神经网络作为调整函数,完成对所述超声波电机转子位置以及速度的控制。
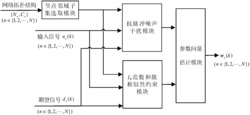
2.根据权利要求1所述的基于基底函数网络的超声波电机模糊神经网络控制方法,其特征在于,所述基于递归式放射性基底函数网络的模糊神经网络根据在线的输入信号,通过在线学习算法动态生成归属函数层神经元、规则神经元层、递归层神经元神经元、放射性基底函数网络隐藏层神经元以及输出层神经元;所述在线学习算法包括架构学习以及参数学习。
3.根据权利要求2所述的基于基底函数网络的超声波电机模糊神经网络控制方法,其特征在于,所述放射性基底函数网络包括输入层、隐藏层以及输出层;若隐藏层采用高斯函数作为接纳范畴函数,将放射性基底函数网络的输出记为X=[x1,x2,…xn]T,其中n为放射性基底函数网络外部输出的个数,则放射性基底函数网络采用权重加总法计算其放射性基底函数网络的输出:
其中, 为放射性基底函数网络基底的第j个输出也是外部网络的第j个规则;wkj为放射性基底函数网络中的隐藏层和输出层间的连结权重值,Γk为放射性基底函数网络中的第k个隐藏层的输出,平均值向量以及标准偏差值向量分别为Λk=[a1k,a2k,…aik]T与 aik和sik分别为放射性基底函数网络之第i个输入之隐藏层内第k个神经元的平均值与标准偏差值,m为放射性基底函数网络基底的个数和放射性基底函数网络中的隐藏层内的接纳范畴单位的个数,其个数相等于所述基于递归式放射性基底函数网络的模糊神经网络模糊逻辑的个数。
4.根据权利要求3所述的基于基底函数网络的超声波电机模糊神经网络控制方法,其特征在于,所述基于递归式放射性基底函数网络的模糊神经网络的第j个规则Rj表示如下:
其中,Rj为递归式放射性基底函数网络为基础之模糊神经网络的第j个规则;hj为其内部变数;fj为递归式模糊神经网络之递归层输出; 为第j个放射性基底函数网络的基底; 为第i个输入时的模糊集合;fj为递归层之输出;Gj为第四层输出;θj、ωi以及wkj分别为输出hj、Gj以及Γj的连结权重值;y*为基于递归式放射性基底函数网络为的模糊神经网络的输出;所述基于递归式放射性基底函数网络的模糊神经网络的架构是一个五层的模糊神经网络,包括动态回授连结以及一放射性基底函数网络,且每一层的网络之信号传递过程与基本关系如下:
第一层:
在该层中的每一个神经元代表一个输入神经元,即一个输入变数,该些神经元只仅允许输入信号通过至下一层,且该层的神经元为放射性基底函数网络的输入神经元,输入变数分别为位置误差x1=dm-d=em以及位置误差的微分x2=Δem;
第二层:
该层中的每一个神经元表示第一层的一个输入变数的语言项,也即该层的归属函数值表示其输入值属于模糊集合的程度,归属函数采用高斯函数
其中mij和σij分别代表递归式以放射性基底函数网络为基础的模糊神经网络中的第二层第i个语言变数输入值xi对应第j个神经元内所属高斯函数的平均值与标准偏差值,且放射性基底函数网络中的隐藏层也包含在该层内;
第三层:
在该层中包含了递归式模糊神经网络的规则层和递归层,并包含了放射性基底函数网络的输出层;递归层中的内部变数hj是采用Sigmoid函数为其归属函数:
其中,hj=ujXj为具有记忆能力之递归单元,θj是递归权重值,每一个神经元表示一个模糊逻辑规则的前置部;对第j个神经元而言:
第四层:
该层的神经元是以所有的输入讯号 以及uj作相互乘积的结果,其中 为放射性基底函数网络的输出,uj为递归式模糊神经网络的第三层输出,该层的神经元数学关系如下所示:
其中Gj为第四层输出;
第五层:
第五层是在计算出整个递归式放射性基底函数网络为基础的模糊神经网络的总输出y*,此层主要为解模糊化的动作,此层输出的数学关系可表示为:
其中,ωj为第五层输出的连结权重值;y*为递归式放射性基底函数网络为基础的模糊神经网络的总输出;m为模糊规则的数目。
5.根据权利要求4所述的基于基底函数网络的超声波电机模糊神经网络控制方法,其特征在于,在所述参数学习过程中,所述基于递归式放射性基底函数网络的模糊神经网络采用监督式梯度下降算法进行在线参数学习,且所述基于递归式放射性基底函数网络的模糊神经网络内的参数更新迭代法则如下:
第五层:反传回来的误差项如下:
第五层与第四层间的连结权重值ωj每次更新迭代如下:
第四层:倒传回来的误差如下:
第三层:倒传回来的误差如下:
基于递归式放射性基底函数网络的模糊神经网络的输出连结权重值Wkj每次更新
迭代如下:
回授权重值θj每次更新迭代如下:
第二层:倒传回来的误差如下:
平均值mij次更新迭代如下:
标准偏差值σij每次更新迭代如下:
其中,ηω为模糊神经网络第五层与第四层间的连结权重值、ηw为模糊神经网络的输出连结权重值、ηθ为回授权重值、ηm为递归式模糊神经网络高斯函数的平均值以及ησ为递归式模糊神经网络高斯函数的标准偏差值的学习速率,能量误差函数E为:
所述基于递归式放射性基底函数网络的模糊神经网络中第五层与第四层间的连结权重值的更新迭代如下:
ωj(N+1)=ωj(N)+Δωj(N)+aΔωj(N-1),
输出连结权重值的更新迭代如下:
wkj(N+1)=wkj(N)+Δwkj(N)+aΔwkj(N-1),
回授权重值的更新迭代如下:
θj(N+1)=θj(N)+Δθj(N),
高斯函数的平均值的更新迭代如下:
mji(N+1)=mji(N)+Δmji(N)+aΔmji(N-1),
高斯函数的标准偏差值的更新迭代如下:
σji(N+1)=σji(N)+Δσji(N)+aΔσji(N-1),
其中,M代表第j个连结的迭代数目,a为惯量因数,它决定以往权值的变化对现在权值变化的影响程度;
采用如下误差适应法则以取代雅可比项
δ5=em+AΔem,
其中,A是一个正的常数值,Δem为追随误差em的导数。
6.根据权利要求4所述的基于基底函数网络的超声波电机模糊神经网络控制方法,其特征在于,在所述架构学习过程中,通过如下方式确定是否能执行架构学习:若emin≤|em|或Δemin≤Δ|em|,则必须执行架构学习,其中emin和Δemin为正的预设常数值;
通过如下方式判断是否在所述归属函数层与所述规则层中增加一新的神经元,即产生一新的归属函数:若 则产生一新的归属函数,其中,最大值 规则层的输出相似程度测量Dj=uj,j=1,...M(t),M(t)是当时间为t时已存在的规则层模糊逻辑规则的数目,D∈(0,1)为预设临界值;所述新的归属函数的平均值以及标准偏差值分别为: 和 也即 和 其中,xi为一新输入的变数,p为一预设的常数值;
通过如下方式判断是否采用该新的归属函数:若 则采用该新的归属函数,其中,最大值
7.根据权利要求6所述的基于基底函数网络的超声波电机模糊神经网络控制方法,其特征在于,在所述架构学习过程中,当一个新的模糊规则产生时,对所述基于递归式放射性基底函数网络的模糊神经网络的输出连结权重值 放射性基底函数网络基底的连结权重值 以及递归权重值 进行初始值赋值,且所述基于递归式放射性基底函数网络的模糊神经网络的输出连结权重值 所述放射性基底函数网络基底的连结权重值 以及所述递归权重值 为随机常数或预设常数。
8.根据权利要求2所述的基于基底函数网络的超声波电机模糊神经网络控制方法,其特征在于,采用递归式神经网络滑动模态控制器来控制所述超声波电机转子的旋转角度,并由此计算得到电机的速度。
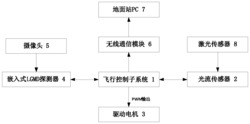
9.根据权利要求1所述的基于基底函数网络的超声波电机模糊神经网络控制方法,其特征在于,所述控制系统包括一超声波电机驱动控制电路;所述超声波电机驱动控制电路包括所述控制芯片电路以及一驱动芯片电路;所述光电编码器的信号输出端与所述控制芯片电路的输入端相连接;所述控制芯片电路的输出端与所述驱动芯片电路的输入端相连接,以驱动所述驱动芯片电路;所述驱动芯片电路的驱动频率调节信号输出端以及驱动半桥电路调节信号输出端分别对应与所述超声波电机输入端相连接;所述驱动芯片电路产生驱动频率调节信号以及驱动半桥电路调节信号,对输出至所述超声波电机A、B两相PWM的频率、相位及通断进行控制。
说明书
技术领域
本发明涉及电机控制器领域,特别是一种基于基底函数网络的超声波电机模糊神经网络控制方法。
背景技术
现有的超声波电机递归式神经网络控制系统的设计中考虑了总集不确定项,而总集不确定项包含了驱动系统中出现的交叉耦合的扰动。而单一网络无法消除交叉耦合的扰动的影响,我们使用递归式放射性基底函数网络为基础的模糊神经网络控制系统进行有效的控制。系统在外力干扰发生时具有较强的鲁棒性并能够有效的控制模糊逻辑规则数目,故递归式放射性基底函数网络为基础的模糊神经网络控制系统能有效的增进系统的控制效能,并进一步减少系统对于外力干扰的影响程度。
发明内容
本发明的目的在于提供一种基于基底函数网络的超声波电机模糊神经网络控制方法,以克服现有技术中存在的缺陷。
为实现上述目的,本发明的技术方案是:一种基于基底函数网络的超声波电机模糊神经网络控制方法,包括一基座以及设置于该基座上的超声波电机,其特征在于,所述超声波电机一侧输出轴与一光电编码器相连接,所述超声波电机另一侧输出轴与一飞轮惯性负载一端相连接;所述飞轮惯性负载的输出轴经一弹性联轴器与一力矩传感器相连接;所述光电编码器的信号输出端以及所述力矩传感器的信号输出端均连接至一控制系统;所述超声波电机、所述光电编码器以及所述力矩传感器分别对应经超声波电机固定支架、光电编码器固定支架以及力矩传感器固定支架固定于所述基座上;所述控制系统中的控制芯片电路通过采用基于递归式放射性基底函数网络的模糊神经网络控制器,并将模糊神经网络作为调整函数,完成对所述超声波电机转子位置以及速度的控制。
在本发明一实施例中,所述基于递归式放射性基底函数网络的模糊神经网络根据在线的输入信号,通过在线学习算法动态生成归属函数层神经元、规则神经元层、递归层神经元神经元、放射性基底函数网络隐藏层神经元以及输出层神经元;所述在线学习算法包括架构学习以及参数学习。
在本发明一实施例中,所述放射性基底函数网络包括输入层、隐藏层以及输出层;若隐藏层采用高斯函数作为接纳范畴函数,将放射性基底函数网络的输出记为X=[x1,x2,…xn]T,其中n为放射性基底函数网络外部输出的个数,则放射性基底函数网络采用权重加总法计算其放射性基底函数网络的输出:
其中, 为放射性基底函数网络基底的第j个输出也是外部网络的第j个规则;wkj为放射性基底函数网络中的隐藏层和输出层间的连结权重值,Γk为放射性基底函数网络中的第k个隐藏层的输出,平均值向量以及标准偏差值向量分别为Λk=[a1k,a2k,…aik]T与 aik和sik分别为放射性基底函数网络之第i个输入之隐藏层内第k个神经元的平均值与标准偏差值,m为放射性基底函数网络基底的个数和放射性基底函数网络中的隐藏层内的接纳范畴单位的个数,其个数相等于所述基于递归式放射性基底函数网络的模糊神经网络模糊逻辑的个数。
在本发明一实施例中,所述基于递归式放射性基底函数网络的模糊神经网络的第j个规则表示如下:
Rj:IFx1is and....andxnis andhj(N)isfj,THEN is isθjandy*isGjωj;
其中,Rj为递归式放射性基底函数网络为基础之模糊神经网络的第j个规则;hj为其内部变数;fj为递归式模糊神经网络之递归层输出; 为第j个放射性基底函数网络的基底; 为第i个输入时的模糊集合;fj为递归层之输出;Gj为第四层输出;θj、ωi以及wkj分别为输出hj、Gj以及Γj的连结权重值;y*为基于递归式放射性基底函数网络为的模糊神经网络的输出;所述基于递归式放射性基底函数网络的模糊神经网络的架构是一个五层的模糊神经网络,包括动态回授连结以及一放射性基底函数网络,且每一层的网络之信号传递过程与基本关系如下:
第一层:
在该层中的每一个神经元代表一个输入神经元,即一个输入变数,该些神经元只仅允许输入信号通过至下一层,且该层的神经元为放射性基底函数网络的输入神经元,输入变数分别为位置误差x1=dm-d=em以及位置误差的微分x2=Δem;
第二层:
该层中的每一个神经元表示第一层的一个输入变数的语言项,也即该层的归属函数值表示其输入值属于模糊集合的程度,归属函数采用高斯函数
其中mij和σij分别代表递归式以放射性基底函数网络为基础的模糊神经网络中的第二层第i个语言变数输入值xi对应第j个神经元内所属高斯函数的平均值与标准偏差值,且放射性基底函数网络中的隐藏层也包含在该层内;
第三层:
在该层中包含了递归式模糊神经网络的规则层和递归层,并包含了放射性基底函数网络的输出层;递归层中的内部变数hj是采用Sigmoid函数为其归属函数:
其中,hj=ujXj为具有记忆能力之递归单元,θj是递归权重值,每一个神经元表示一个模糊逻辑规则的前置部;对第j个神经元而言:
第四层:
该层的神经元是以所有的输入讯号 以及uj作相互乘积的结果,其中 为放射性基底函数网络的输出,uj为递归式模糊神经网络的第三层输出,该层的神经元数学关系如下所示:
其中Gj为第四层输出;
第五层:
第五层是在计算出整个递归式放射性基底函数网络为基础的模糊神经网络的总输出y*,此层主要为解模糊化的动作,此层输出的数学关系可表示为:
其中,ωj为第五层输出的连结权重值;y*为递归式放射性基底函数网络为基础的模糊神经网络的总输出;m为模糊规则的数目。
在本发明一实施例中,在所述参数学习过程中,所述基于递归式放射性基底函数网络的模糊神经网络采用监督式梯度下降算法进行在线参数学习,且所述基于递归式放射性基底函数网络的模糊神经网络内的参数更新迭代法则如下:
第五层:反传回来的误差项如下:
第五层与第四层间的连结权重值ωj每次更新迭代如下:
第四层:倒传回来的误差如下:
第三层:倒传回来的误差如下:
基于递归式放射性基底函数网络的模糊神经网络的输出连结权重值Wkj每次更新迭代如下:
回授权重值θj每次更新迭代如下:
第二层:倒传回来的误差如下:
平均值mij次更新迭代如下:
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0