






专利摘要
一种三帧差分高阶统计量结合OTSU算法的絮体检测方法。本发明根据目前常用的絮体跟踪方法容易受到噪声、光线及絮体运动速度等影响,很难提取出完整的絮体运动目标的特征,为此提出一种基于三帧差分高阶统计量(HOS)结合粒子群优化增强大津法(OTSU)的絮体目标检测方法。该方法首先对连续三帧图像进行差分运算,然后逐像素计算四阶矩并与阈值比较,其中利用粒子群优化增强大津法获取最佳阈值,采用最佳阈值进行图像二值化并进行图像后处理,最终获取较清晰的絮体目标,为后续絮体分析自动化奠定基础。本发明方法具有准确快速的特点,能有效提取絮体目标,适用于水处理中絮体目标的有效提取。
权利要求
1.一种三帧差分高阶统计量结合OTSU算法的絮体检测方法,其特征在于,所述方法基于运动絮体不规则,受环境影响大的原因,使用基于三帧差分、高阶统计量和粒子群优化增强大津法提取絮体特征,包括以下步骤:
(1)分别对当前帧It,前一帧It-1,后一帧It+1进行预处理,包括灰度修正,图像增强等处理;
(2)It-1,It,It+1分别做差分,得到差分图像Dt+1,Dt;
(3)对差分图像进行相与运算得到差分图像Di;
(4)利用粒子群优化增强大津法确定最佳阈值T;
(5)逐像素计算四阶矩并与最佳阈值T比较,大于T值,认为其是运动目标,像素值置为1,否则为0;
(6)对步骤(5)中的图像,利用图像后处理技术,进一步完善不完整的边界,从而得到完整的边界图像,从而实现絮体目标的顺利提取。
2.根据权利要求1所述的一种三帧差分高阶统计量结合OTSU算法的絮体检测方法,其特征在于,所述确定最佳阈值,首先对粒子的位置和速度给一个随机解,由于是灰度图像范围在0-255之间,所以要在此范围内给定粒子位置,所有的随机值由rand()函数产生;然后计算适应度函数值并进行比较,迭代计算,最终求得最优解,也就是最佳阈值。
3.根据权利要求1所述的一种三帧差分高阶统计量结合OTSU算法的絮体检测方法,其特征在于,所述图像后处理技术,即先用较小的结构元素对图像做一次“开”运算消除孤立噪声;再用较大的结构元素对图像做一次“闭”运算填补目标内部空洞;进一步完善不完整的边界,从而得到完整的边界图像,从而实现絮体目标的顺利提取。
说明书
技术领域
本发明涉及一种三帧差分高阶统计量结合OTSU算法的絮体检测方法,属水处理絮体检测方法技术领域。
背景技术
随着人们生活水平的不断提高,人们对饮用水水质的要求也越来越高,国内外常规水处理工艺一般包括混凝、沉淀、过滤、消毒等几个阶段。自来水处理的过程中会产生絮体凝结现象,而絮体的多少、大小、沉降速度等是判断混凝效果的重要的参数。运动目标检测是絮体图像定量分析中的重要一步,也是影响絮体分析自动化、工作稳定性、结果精确性的关键。工业摄像机所获图像由于在成像过程中可能存在光照不均匀、絮体运动速度慢、絮体分布变化等情况,使得絮体的颜色深浅不一、均匀性差,同时存在噪声,而且絮体还存在表面反光不同的现象。因此准确地实现絮体目标与背景的检测,是进一步分析絮体特征的基础。
目前实现絮体目标的检测方法有很多,常用的有背景差分法,帧间差分法和光流法。
帧间差分法是在视频序列中的2个或3个相邻帧间,采用逐像素差分并阈值化来提取图像中的运动区域,它能较快的检测出视频图像中发生变化的部分。帧差法方法简单,对环境的适应性比较好,稳定性高,在理想情况下,摄像机静止时,如果相减后连续桢间灰度差为零,则认为该点属于静止背景,反之则属于运动物体区域。但实际情况中往往存在很多噪声干扰,只根据差值是否为零不能确定该点的变化情况。三帧差分采用三帧图像分别相减,效果比二帧差分好。帧差法中简单的对差值图像阈值化方法虽可以大致分离出运动目标和背景,但阈值的设定方法往往较为困难,并且很难滤除噪声的影响。所以需要进一步的改进对噪声的处理方法和改进对阈值的选取方法来有效分离运动目标和背景。
对于噪声处理方法,当前有很多处理方法,如平滑去噪等,其中采用高阶统计量(higher order statistics,HOS),是指3阶或3阶以上阶数的统计量,包括高阶累积量、高阶矩和高阶谱,高阶累积量在理论上可以完全抑制高斯噪声的影响以及其它的一些特性,因此,通常更多地利用高阶累积量及高阶谱作为处理噪声工具。
对于阈值选取方法,主要有双峰法、迭代法、最大类间方差法(OTSU,即大津法)。双峰法虽然简单,但是适应性较差;迭代法运算量巨大,不适用于实时系统;相对而言大津法的效果最好。大津法首先把图像像素用阈值T分为两类,再计算两类像素灰度值的类间方差和类内方差,以两者之比为最大时来确定阈值T。
但在模拟实验时发现,在处理背景与前景目标灰度相差不多时,用大津法会出现大量的黑色区域,严重时甚至会丢失整个目标。有学者提出引入一种灰度拉伸的增强大津法,即采用非线性变换对图像进行灰度拉伸,然后确定阈值,但是这也增加了运算时间。
粒子群优化算法是在对群体行为进行模拟的过程中发现的一种概率搜索方法。算法从初始粒子群开始,通过迭代搜索粒子适应度函数的最优解。在每一次迭代中,各个粒子根据自身找到的最优解pbest和整个粒子群所找到的最优解gbest来调整运动的速度和方向,以更新粒子的位置。
粒子群优化增强大津法(OTSU)就是利用粒子群优化算法对增强大津法进行优化,它有效的解决了增强大津法的时间问题,算法首先对粒子的位置和速度给一个随机解,由于是灰度图像范围在0-255之间,所以要在此范围内给定粒子位置,所有的随机值由rand()函数产生。然后计算适应度函数值并进行比较,迭代计算,最终求得最优解,也就是最佳阈值。
发明内容
本发明目的是,针对三帧差分法的不足及噪声影响和当前阈值选取方法存在的问题,本发明提出了一种基于三三帧差分分高阶统计量(HOS)和粒子群优化增强大津法(OTSU)的絮体目标检测方法。
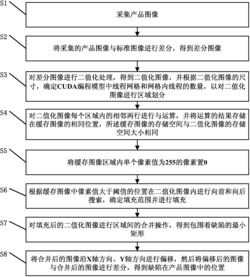
实现本发明的技术方案是,本发明基于运动絮体不规则,受环境影响大的原因,使用基于三帧差分、高阶统计量和粒子群优化增强大津法提取絮体特征,包括以下步骤:
(1)分别对当前帧It,前一帧It-1,后一帧It+1进行预处理,包括灰度修正,图像增强等处理;
(2)It-1,It,It+1分别做差分,得到差分图像Dt+1,Dt;
(3)对差分图像进行相与运算得到差分图像Di;
(4)利用粒子群优化增强大津法确定最佳阈值T;
(5)逐像素计算四阶矩并与最佳阈值T比较,大于T值,认为其是运动目标,像素值置为1,否则为0;
(6)对步骤(5)中的图像利用图像后处理技术,进一步完善不完整的边界,从而得到完整的边界图像,从而实现絮体目标的顺利提取。
所述确定最佳阈值的方法,首先对粒子的位置和速度给一个随机解,由于是灰度图像范围在0-255之间,所以要在此范围内给定粒子位置,所有的随机值由rand()函数产生。然后计算适应度函数值并进行比较,迭代计算,最终求得最优解,也就是最佳阈值。
所述图像后处理技术,即先用较小的结构元素对图像做一次“开”运算(Open Operation)消除孤立噪声;再用较大的结构元素对图像做一次“闭”运算(Close Operation)填补目标内部空洞;进一步完善不完整的边界,从而得到完整的边界图像,从而实现絮体目标的顺利提取。
本发明基于絮体运动的特征,提出了基于三帧差分高阶统计量(HOS)和粒子群优化增强大津法进行絮体检测与提取的方法。与现有方案相比较,本发明改进的方法可以比较准确地提取到运动絮体的边缘,提取的絮体目标区域也比较完整,尤其对面积较大的目标提取效果良好,一定程度上解决了传统二帧差分方法的不足,和检测过程中噪声干扰、边缘检测不完整、易产生目标“空洞”的缺点,能准确的实现絮体目标区域的实时提取。
本发明的有益效果是,本发明采用三帧差分方法提取絮体目标,避免了二帧差分方法可能出现的目标提取不完整等问题;但同时三帧差分方法中存在最佳阈值的选取问题和噪声影响问题,本发明采用粒子群增强大津法选取最佳阈值,有效解决了采用迭代法等方法可能出现的阈值选取不合理,效率低等问题,并采用HOS技术,避免了噪声的干扰。因此,本发明提出的改进方法具有快速,准确,提取絮体目标完整,抗噪性能佳等优点,该发明有一定的实用价值,能有效的提取絮体目标。
本发明适用于水处理中运动絮体的目标提取。
附图说明
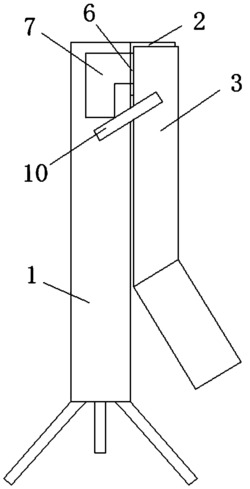
图1为本发明的较佳的实验设备示意图;
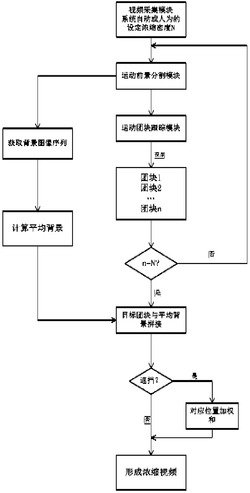
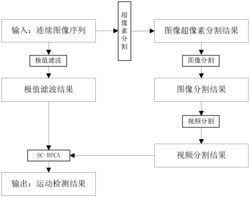
图2为本发明的流程图;
图3为本发明中方法仿真的对比效果图:
图3(a)为原始图像;
图3(b)为原始图像;
图3(c)为原始图像;
图3(d)为对原始图像图3(a)的二三帧差分分;
图3(e)为对原始图像图3(b)的二三帧差分分;
图3(f)为对原始图像图3(c)的二三帧差分分;
图3(g)为对原始图像图3(a)的三三帧差分分+迭代;
图3(h)为对原始图像图3(b)的三三帧差分分+迭代;
图3(i)为对原始图像图3(c)的三三帧差分分+迭代;
图3(j)为对原始图像图3(a)的三三帧差分分+大津法;
图3(k)为对原始图像图3(b)的三三帧差分分+大津法;
图3(l)为对原始图像图3(c)的三三帧差分分+大津法;
图3(m)为对原始图像图3(a)的本发明处理方法;
图3(n)为对原始图像图3(b)的本发明处理方法;
图3(o)为对原始图像图3(c)的本发明处理方法。
具体实施方式
根据本发明方法的步骤,本发明具体实施方式如下:
第一步:按照图1所示,摆放实验器材。在絮凝池末端水中安装传感器;使水流水平、缓慢地流经取样窗,通过工业摄像头连续采集取样窗口的水流(絮体)图像,实验中根据实际需求设定采样时间间隔。本次实验中采用的时间间隔Tsampe为1s(在1s时间内,观测窗体的絮体数有很好的代表性)粒子数为100个左右,可以作为样本用于处理图像。
第二步:三帧差分及噪声处理。分别对采集的图像的前一帧ft-1(x,y),当前帧ft(x,y),后一帧ft+1(x,y)进行平滑去噪,然后计算ft-1(x,y)与ft(x,y)差分图像Dt,ft+1(x,y)与ft(x,y)差分图像Dt+1,然后将Dt,Dt+1进行与运算后得到差分图像Qdiff(x,y),最后选取合适阈值,对于三帧差分法,选取合理的阈值对目标提取的效果起着重要作用,根据公式(6)对差分结果进行阈值化得到二值结果。;
(A)假定外界光照条件未变化或变化不大的条件下,相邻图像序列的表示如下:
ft(x,y)=Mt(x,y)+Bt(x,y)+nt(x,y) (1)
(B)两式相减后得到相邻两帧图像的差分图像为:
按上述公式计算当前帧与后一帧的差分图像,并依此计算出当前帧与前一帧的差分图像。
(C)以(x,y)为中心取3×3的移动窗口,则Nη=9,(x,y)点四阶矩平均值
为,
其中 为移动窗口内帧间差灰度值的平均值:
(D)二值化
选取合适阈值,对于三帧差分法,选取合理的阈值对目标提取的效果起着重要作用,下面用优化增强大津法确定阈值。
第三步:第二步中阈值的选取。利用改进后的大津法即粒子群优化增强大津法确定最佳阈值。增强大津法由于引入灰度拉伸改善了大津法效果的同时也增加了运算的时间,应用于实时在线的阈值选取时,不利于实时操作,基于时间的要求,本实施例对增强大津法进行改进,即采用粒子群优化算法优化增强大津法,首先对粒子的位置和速度给一个随机解,由于是灰度图像范围在0-255之间,所以要在此范围内给定粒子位置,所有的随机值由rand()函数产生。然后计算适应度函数值并进行比较,迭代计算,最终求得最优解,也就是最佳阈值。
计算过程中权重w和c1,c2等参数的选取十分关键,其中权重w的选择影响方法的搜索能力。通常情况下,希望在最初的时候有较强的全局搜索能力,后期则偏重局部搜索能力的增强;一般在搜索过程中w取值从0.9线性递减到0.4,为了使粒子能更好地找到最优值,一般取c1=c2=2。
第四步:根据第一步中的公式(6)和第二步中的最佳阈值对差分结果进行二值化,确定二值化图像。
第五步:对(5)中的图像利用图像处理后处理技术,如:1)先用较小的结构元素B1对图像做一次“开”运算(Open Operation)消除孤立噪声;2)再用较大的结构元素B2对图像做一次“闭”运算(Close Operation)填补目标内部空洞;进一步完善不完整的边界,从而得到完整的边界图像,从而实现絮体目标的顺利提取。
第六步:软件仿真实现,图3为仿真结果。用常见的3种方法和本发明方法,分别完成了运动检测模块的设计与实验,整个程序基于Windows操作系统,采用了mathwork公司的matlab7.0或Microsoft的Visual C++6.0为编程开发平台。
本实施例所用的摄像机器配置是CCD数字工业摄像机,使用了10组拍摄的视频序列图像进行实验,每个序列含有30帧左右,图像大小为312×288的tiff格式、256×190的gif格式图像等,分别取有代表性的连续三帧图像,用常见的3种方法(二三帧差分分方法、三三帧差分分方法+迭代方法、三三帧差分分+大津法)和本发明的方法,分别完成了运动检测模块的设计与实验,整个程序基于Windows操作系统,采用了mathwork公司的matlab7.0和Microsoft的Visual C++6.0为编程开发平台。
一种三帧差分高阶统计量结合OTSU算法的絮体检测方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0