





专利摘要
本发明提供了一种海底管道气动带压接入装置,应用于海底管道油气并流不停输带压接入作业。该带压接入装置配有两套液压驱动系统实现双动力周向驱动,并结合自锁机构和金属密封圈完成接入体在海底管道上的自动锁紧和水下对接;静密封器依据其阶梯回转体以及锥形金属圈和多边形金属环形成双重金属密封的静密封,同时动密封器依据填料和密封圈以及双圆盘式迷宫密封的多重密封技术实现水下调控器与开孔设备间的动密封;水下调控器依据气动调节以及调控球与调控座和调控盖间的球面配合完成钻孔作业的自动关断,且接入控制系统远程自动调控并流输送中油气输送介质的流量和外输压力,由此使得该装置具备操作简便、接入时间短、施工成本低等特点。
权利要求
1.一种海底管道气动带压接入装置,包括接入体、静密封器、水下调控器、动密封器、液压驱动系统和接入控制系统,它采用静密封和动密封双密封技术,并结合水下气动自动调控系统、液压双动力驱动系统和剖分套筒式接入体实现海底管道的带压接入,其特征在于:
一接入体;所述接入体采用卧式剖分套筒体,其前后接入本体采用沿轴向全对称布置的厚壁筒体,前接入本体中部的筒体壁上设置三通管段,前后接入本体的环腔内壁采用阶梯回转面,其内锥面构成的环腔中配置锥形金属圈,而内锥面内侧的等腰梯形凹槽所构成的环腔中则配置梯形金属圈,梯形金属圈采用沿圆周方向均匀布置的分片构造;前后接入本体的顶端均设有沿轴向等间距分组布置的下销轴套,每个后接入本体的轴套环腔内配置有衬套,前后接入本体剖分面的上部和下部均设置有分组排列的锥形凸台;后接入本体下端正对其等腰梯形凹槽的位置设有U形沟槽,且U形沟槽两侧槽面靠近海底管道的端部均设置锲形坡口,该锲形坡口与锁销端部的锲形坡口相配合,而前接入本体下端正对其等腰梯形凹槽的位置设有与后接入本体U形沟槽相配合的拱形锁块;自锁块包括左右对称布置的两个锁销和锁盖及一个弹簧,锁销采用阶梯轴结构;推进架分两组对称布置于前后接入本体的两侧,每组推进架整体呈现类V形的形状,每个分推进架的矩形钢板沿轴向设置两个矩形沟槽;
一静密封器;所述静密封器采用左右分体式和前后剖分式的双对称构造,锥形金属圈呈剖分式锲形轴瓦构造,而多边形金属环则采用粗金属环体,其截面呈长六边形;滑移环法兰盘端面上设置的环形凹槽与前后接入本体的环形凹槽对称布置且所构成的环腔中配置多边形金属环,同时滑移环环体的外环面和内壁上均加工有截面为矩形的环形凹槽;
一液压驱动系统;所述液压驱动系统提供周向推进动力完成前后接入本体的自动张开和闭合,同时每组推进架分别配置一套液压驱动系统而实现双动力驱动,每套液压驱动系统采用两个并行排列的独立液压缸,且通过推进架完成前后接入本体间的动力传递;
一水下调控器;所述水下调控器依据气动调节以及调控球与调控座和调控盖间的球面配合完成钻孔作业的自动关断,金属垫片采用垫片式金属环体,气动阀组提供动力并通过气压传动由调控轴带动调控球旋转;密封压套采用变径环体,其下端的调控座上通管环腔内配置有分层叠放的矩形密封圈;调控轴的轴身与密封压套的内壁精密配合而构成转动副,而其轴颈的外壁上加工有分层排列的环沟,同时轴颈与调控座上通管的内壁精密配合而构成转动副;调控座和调控盖的本体采用球形筒体,调控球沿垂直于调控座左通管和调控盖侧通管轴线的方向上切有两个相互平行的切面,调控座和调控盖本体的内外球面同心且与调控球的球心始终保持重合而构成球面配合,同时调控球与调控座以及调控球与调控盖间的球面结合带的轴向长度均大于调控球上两切面间距的四分之一;
一接入控制系统;所述接入控制系统通过压力变送器和气动控制阀远程自动调控新接入油井产液的流量,通过压差变送器和气动控制阀自动调控油气输送介质的流量和外输压力;
一动密封器;所述动密封器依据填料和密封圈以及双圆盘式迷宫密封的多重密封技术将其与接入体和水下调控器相联通的内腔分隔成独立的密闭腔室,填料密封体采用法兰盘式构造,且迷宫密封体采用双圆盘式迷宫密封,迷宫盘和迷宫环的各环形沟槽内填充油液且其两侧端面分别保持平齐而形成迷宫密封,迷宫环的环腔内壁布置分层排列的凹槽。
2.根据权利要求1所述的海底管道气动带压接入装置,其特征在于:所述接入体的前后接入本体依据其剖分式构造而分别套于海底管道接入管段的前部和后部,前后接入本体两侧端各螺纹孔的四周加工有环形凹槽,该环形凹槽的截面呈等腰梯形,梯形金属圈的各分片由前后接入本体分别夹紧且其各分片的结合处采用间隙配合;
所述前接入本体中的每组下销轴套仅设置一个轴套,而后接入本体中的每组下销轴套均含有两个同轴心的轴套,并与前接入本体的轴套交错排列,且后接入本体最两侧的轴套端面分别与前后接入本体的端面保持平齐;同时衬套的内径与前接入本体轴套的孔径相等并同轴心布置,且各衬套和前接入本体的轴套分别与下销轴配合;
所述后接入本体中U形沟槽两侧槽面的中间部位钻有圆形盲孔,且圆形盲孔的内壁精细研磨,同时前接入本体中拱形锁块的环腔内壁采用阶梯回转面,其变截面结合处嵌入锁盖。
3.根据权利要求1或2所述的海底管道气动带压接入装置,其特征在于:所述自锁块完成接入体的快速自动锁紧,锁销中移动销和定位销的截面变化处设置锁盖而实现锁销的定位,且自锁块两侧定位销的变截面结合处形成的台肩实现弹簧在前接入本体拱形锁块环腔中的定位;移动销分别与锁盖中间的孔眼和后接入本体U形沟槽的圆形盲孔精密配合而构成移动副,同时定位销与前接入本体拱形锁块的环腔精密配合而构成移动副;
所述推进架与前后接入本体的下销轴套交错排列,每组推进架均含有两个对称分布的分推进架,每个分推进架采用矩形钢板和等腰梯形钢板相结合的结构,其矩形钢板沿其长度方向立式布置,而其等腰梯形钢板的中心对称面与水平面间呈45°,每组推进架的矩形沟槽分别配置两个独立的液压缸。
4.根据权利要求1所述的海底管道气动带压接入装置,其特征在于:所述静密封器与接入体同轴心布置,静密封器含有左右两个结构和规格尺寸完全相同的单体,且其单体对称布置于接入体的两侧端;锥形金属圈的内径大于海底管道的外径,同时锥形金属圈外锥面的锥度等于前后接入本体内锥面的锥度,而其外锥面的锥高则大于前后接入本体内锥面的锥高;
所述滑移环侧端的法兰盘上钻有与前后接入本体两侧端的螺纹孔相同位置和布置形式的孔眼,滑移环外环面的环形凹槽分层排列且其内填充润滑脂,而其内壁的环形凹槽内则填充玻璃胶,滑移环环体的外环面与前后接入本体的内壁精密配合而构成移动副。
5.根据权利要求1或2或3或4所述的海底管道气动带压接入装置,其特征在于:所述液压驱动系统所有独立液压缸的液压油经过多路换向阀统一分配,实现接入体和静密封器剖分单体的自动同步周向推进;
所述海底管道气动带压接入装置的水下对中和对接作业流程为,打开液压驱动系统,各液压缸通过其缸筒上的回油口和多路换向阀进行回油,后接入本体依靠液压缸提供的周向推进双动力逐渐张开,然后通过吊机继续吊装下放整套接入装置,直至前接入本体的内壁与海底管道接入管段的外环面重合为止,接着各液压缸通过其缸筒上的出油口和多路换向阀进行通油,后接入本体逐渐朝着前接入本体闭合,待前接入本体拱形锁块内的自锁块锁销滑入后接入本体U形沟槽的圆形盲孔内,实现前后接入本体的自动锁紧,由此完成水下对中作业;然后,关闭并拆卸液压驱动系统的各液压缸,前后接入本体的各组锥形凸台内装入夹紧螺柱,然后旋紧各夹紧螺柱,依靠前后接入本体所传递的夹紧压力,梯形金属圈沿径向移动并逐步与海底管道贴合后产生变形而形成金属圈密封;接着,旋紧静密封器的各推进螺柱,依靠滑移环所传递的推力,锥形金属圈和多边形金属环依次受挤压产生变形而形成双重金属密封的静密封;最后,待滑移环内壁环形凹槽内的玻璃胶凝固,完成整个水下对接作业。
6.根据权利要求1所述的海底管道气动带压接入装置,其特征在于:所述海底管道气动带压接入装置的水下气动自动调控系统由水下调控器和接入控制系统组成;
所述水下调控器中金属垫片的外径小于调控盖左侧法兰盘的外径而其内径则大于调控球的球径,矩形密封圈的截面呈矩形;气动阀组的下端配有联轴套,支座采用矩形筒体,其上下筒壁均钻有圆孔,并通过联接螺栓将气动阀组和调控座连为一体;
所述水下调控器的矩形密封圈和○型密封圈通过密封压套产生变形而在调控座和调控轴间形成非金属密封,密封压套内壁的上部加工有分层排列的环槽,每层环槽的腔室内配置○型密封圈,密封压套的上部采用正六边形的方体。
7.根据权利要求1所述的海底管道气动带压接入装置,其特征在于:所述水下调控器的调控轴将气动阀组的动力传递至调控球,其材质选用耐磨、高强和热变形小的调质合金钢,调控轴的两端通过方径接头而上接联轴套同时下连调控球,调控轴的轴颈与轴身截面变化处形成轴肩并用来定位矩形密封圈;
所述调控座的上通管和左右通管以及调控盖的侧通管均采用柱形筒体,调控座的左通管、调控盖的侧通管和动密封器中动密封本体同轴心布置且其内径均等于调控球的内环壁直径,调控座的右通管和调控盖的侧通管之间配置金属垫片;调控球上两切面所在的圆面直径相等并均大于调控球的内环壁直径,调控座本体的内球面直径、调控座右通管的内径、调控盖本体的内球面直径均等于调控球的球径。
8.根据权利要求1所述的海底管道气动带压接入装置,其特征在于:所述接入控制系统在海底管道接入管段的管壁上设置压力变送器,通过监测并流输送后原有海底管道内的压力状况,并经气电转换器将电信号转换成气信号,自动控制新接入海管上气动控制阀的气动量,进而自动调控新接入油井产液的流量并保证整个海底管道供液的稳定;
所述接入控制系统在海底管道接入管段和新接入海管的管壁上设置压差变送器,通过实时监测两管段间的压差,并经气电转换器将电信号转换成气信号,自动控制新接入海管上气动控制阀的气动量,进而自动调控油气输送介质的流量和外输压力。
9.根据权利要求1所述的海底管道气动带压接入装置,其特征在于:所述动密封器与接入体和水下调控器的各密闭腔室内填满含冷却液和防腐剂的液体,其填料密封体由填料盘、压盖和填料组成,填料盘的环腔内壁采用阶梯回转面,变截面结合处用来定位压盖,压盖通过螺纹联接压紧填料而形成填料密封;迷宫密封体同轴心布置于动密封本体的两侧端,它由迷宫盘和迷宫环组成,迷宫盘的环腔内壁加工有沿轴向均匀排列的环形沟槽,且迷宫环外环面的同样位置处设置相同规格尺寸的环形沟槽,同时迷宫环环腔内壁的各层凹槽内配置○形密封圈;动密封本体采用厚壁筒体,其两端的法兰盘与填料密封体的填料盘、迷宫密封体的迷宫盘以及水下调控器侧通管右侧的法兰盘均钻有相同数量和规格大小的圆形孔眼。
10.根据权利要求1或6或7或8或9所述的海底管道气动带压接入装置,其特征在于:所述海底管道气动带压接入装置的水下接入作业流程为,打开水下调控器,并使调控座的左通管和调控盖的侧通管与调控球的内环壁同轴心布置;然后,旋紧填料密封体压盖的螺纹并压紧填料而形成填料密封,同时结合密封圈以及双圆盘式迷宫密封的多重密封技术实现带压接入装置与开孔设备钻杆间的动密封,并在动密封器与接入体和水下调控器所分隔出的各密闭腔室内填满含冷却液和防腐剂的液体;接着,将开孔设备的刀具进给至接入体的三通管段内并实施钻孔作业,海底管道接入管段上开孔结束后,将开孔设备的刀具退刀至调控盖的侧通管内;然后,启动水下调控器,气动阀组的动力通过气压传动并由气动阀组的联轴套和调控轴带动调控球旋转90°而实施自动关断操作,并使调控座左通管和调控盖侧通管的轴线与调控球的内环壁轴线垂直相交布置;接着,旋松并打开左侧迷宫密封体迷宫盘上的各密封螺柱,将动密封器随同开孔设备的刀具和钻杆一起从水下调控器上拆卸下来,然后在调控盖侧通管的管端装上新接入海管;最后,接入控制系统远程通过压力变送器和压差变送器的实时监测并经气动控制阀,自动调控并流输送中油气输送介质的流量和外输压力。
说明书
技术领域
本发明涉及一种水下生产系统海底管道带压接入装置,特别是涉及一种海底管道不停输工况下的气动带压接入装置及其带压接入方法。
背景技术
海洋工程领域新开发的海上油气田为满足油气等物流输送,往往需要新建上百公里甚至更远距离的海底管道,因其投资成本高昂,使得新开发油气田的收益率急剧降低,此时需要采用特殊形式的海上油气输送开发方案,如通过带压接入技术新建短距离海底管道接入原有管道,实现并流输送,可以大幅度降低油气田开发投资成本,为深水油田和边际油田的开发方案研究提供了一种新的思路。
目前,国外一些管道技术公司,如FLOW SERVE公司等,都装备有不停输带压接入设备,且其接入设备多采用液压驱动或爆破开孔,多年来成功地完成了大量管道的改造与抢修工程,然而,多数国外公司不出售此类设备,只提供技术上的服务,且费用较贵。
国内带压接入技术在海上油田改造工程项目中的应用主要是借鉴陆上油田带压开孔经验,其中常规接入技术是在原有海底管道主管上引出一路三通支管,通常做法是在主管上切掉一段管道,然后焊接引出支管的三通管件,最后接入新的海底管道,该技术中的停产、清管和水下焊接等作业都限制了其在海底管道不停输接入方案中的应用;带压开孔接入技术是在原有工艺管道上直接焊接三通法兰短节并安装阀门和法兰,对三通、法兰和阀门进行密闭性试验以保证焊缝无泄漏,然后将开孔机安装在阀门上并进行手动进刀和开孔,最后关闭阀门并从阀门上拆卸开孔机,可以看出这种带压开孔接入技术需要采用氮气来完全置换出开孔机、阀门及三通所构成密闭空间中的空气并保证刀具处于无氧环境中实施切割,操作难度系数较大且不适用于海底管道水下特殊工况,同时三通短节需要焊接到原有工艺管道上且需要进行密闭性试验,这些都不适合在水下环境中进行操作。
发明内容
为了有效解决海底管道不停输接入问题并克服现有带压接入技术应用于水下作业时存在的缺陷和不足,本发明的目的是提供一种适合水下海底管道不停输接入作业用的气动带压接入装置,该带压接入装置采用静密封和动密封双密封技术,并结合水下气动自动调控系统、液压双动力驱动系统和剖分套筒式接入体实现水下海底管道的带压接入,具备操作简便、接入时间短、施工成本低等特点,尤其适用于深水油田和边际油田海底管道油气并流不停输作业的快速接入要求。
本发明解决其技术问题所采用的技术方案是开发一种海底管道气动带压接入装置,主要由接入体、静密封器、水下调控器、动密封器、液压驱动系统和接入控制系统几部分组成。水下带压接入作业中,整套接入装置通过施工船上的吊机吊装至海底管道接入管段的正上方,接入体依靠液压驱动系统提供的周向推进动力实施前后接入本体的张开和闭合操作,并经其自锁块实现前后接入本体的自动锁紧;然后旋紧各夹紧螺柱并使梯形金属圈形成金属圈密封,同时静密封器通过旋紧各推进螺柱挤压锥形金属圈和多边形金属环依次产生变形而形成双重金属密封的静密封;接着动密封器依据填料和密封圈以及双圆盘式迷宫密封的多重密封技术实现带压接入装置与开孔设备钻杆间的动密封,以保证钻孔作业的顺利进行;最后水下调控器通过气动调节完成钻孔作业后的自动关断,接入控制系统远程自动调控并流输送中油气输送介质的流量和外输压力。
接入体采用卧式剖分套筒体,依据液压驱动系统提供的周向推进动力并结合自锁机构和金属密封圈实现接入体在海底管道上的自动锁紧和水下对接,它包括前后接入本体、自锁块、梯形金属圈和推进架,其主要部件的材质选用超级双向不锈钢。前后接入本体采用沿轴向全对称布置的厚壁筒体,前后接入本体依据其剖分式构造而分别套于海底管道接入管段的前部和后部,前接入本体中部的筒体壁上设置三通管段并与水下调控器和新接入海管依次联接在一起,作为并流输送中油气进入原有海底管道的入口管段;前后接入本体的两侧端车制有沿圆周方向均匀布置的螺纹孔,且各螺纹孔的四周加工有环形凹槽,该环形凹槽的截面呈等腰梯形;前后接入本体的环腔内壁采用阶梯回转面,其内锥面构成的环腔中配置锥形金属圈,而内锥面内侧的等腰梯形凹槽所构成的环腔中则配置梯形金属圈,梯形金属圈和锥形金属圈的本体材质均采用强度高和耐温性能强的金属,同时金属圈本体的内部设有均匀分布的金属丝且其本体的外部包裹有金属箔片;梯形金属圈采用沿圆周方向均匀布置的分片构造,梯形金属圈的各分片由前后接入本体分别夹紧且其各分片的结合处采用间隙配合。
前后接入本体的顶端均设有沿轴向等间距分组布置的下销轴套,前接入本体中的每组下销轴套仅设置一个轴套,而后接入本体中的每组下销轴套均含有两个同轴心的轴套,并与前接入本体的轴套交错排列,且后接入本体最两侧的轴套端面分别与前后接入本体的端面保持平齐;每个后接入本体的轴套环腔内配置有衬套,该衬套的内径与前接入本体轴套的孔径相等并同轴心布置,且各衬套和前接入本体的轴套分别与下销轴配合而实现前后接入本体间的铰接,下销轴的轴端加工有螺纹盲孔并配置圆柱头螺钉进行固定。前后接入本体剖分面的上部和下部均设置有分组排列的锥形凸台,且每组锥形凸台的中间钻有等径圆孔并分别配置夹紧螺柱,由此实现前后接入本体间的联接,同时施加夹紧压力而形成金属圈密封。
后接入本体下端正对其等腰梯形凹槽的位置设有U形沟槽,该U形沟槽两侧槽面的中间部位钻有圆形盲孔,且圆形盲孔的内壁精细研磨,并与自锁块的锁销配合,而U形沟槽两侧槽面靠近海底管道的端部均设置锲形坡口,该锲形坡口与锁销端部的锲形坡口相配合;同时前接入本体下端正对其等腰梯形凹槽的位置设有与后接入本体U形沟槽相配合的拱形锁块,该拱形锁块的环腔内壁采用阶梯回转面,其变截面结合处嵌入锁盖。
自锁块用于完成接入体的快速自动锁紧,自锁块包括左右对称布置的两个锁销和锁盖及一个弹簧。锁销采用阶梯轴结构,其材质选用35CrMo,它由移动销和定位销两部分组成,移动销和定位销的截面变化处设置锁盖而实现锁销的定位,且自锁块两侧定位销的变截面结合处形成的台肩实现弹簧在前接入本体拱形锁块环腔中的定位。锁销表面进行精加工,移动销分别与锁盖中间的孔眼和后接入本体U形沟槽的圆形盲孔精密配合而构成移动副,同时定位销与前接入本体拱形锁块的环腔精密配合而构成移动副。
推进架分两组对称布置于前后接入本体的两侧并与前后接入本体的下销轴套交错排列,每组推进架均含有两个对称分布的分推进架;每个分推进架采用矩形钢板和等腰梯形钢板相结合的结构,其矩形钢板沿其长度方向立式布置,而其等腰梯形钢板的中心对称面与水平面间呈45°,由此每组推进架整体呈现类V形的形状;每个分推进架的矩形钢板沿轴向设置两个矩形沟槽,每组推进架的矩形沟槽分别配置两个独立的液压缸并通过长销轴而实现接入体与液压驱动系统间的联接。
静密封器采用左右分体式和前后剖分式的双对称构造,且静密封器与接入体同轴心布置,并依据其变截面的阶梯回转体实现双重金属密封的静密封,静密封器含有左右两个结构和规格尺寸完全相同的单体,且其单体对称布置于接入体的两侧端,它包括滑移环、锥形金属圈和多边形金属环。锥形金属圈呈剖分式锲形轴瓦构造,其内径大于海底管道的外径,同时锥形金属圈外锥面的锥度等于前后接入本体内锥面的锥度,而其外锥面的锥高则大于前后接入本体内锥面的锥高。多边形金属环采用粗金属环体,其截面呈长六边形;同时,多边形金属环和水下调控器中金属垫片的本体材质均采用强度高和耐温性能强的金属,且其本体的外部包裹有金属箔片。
滑移环用来将推进螺柱所施加的推力传递至锥形金属圈和多边形金属环,其侧端的法兰盘上钻有与前后接入本体两侧端的螺纹孔相同位置和布置形式的孔眼,并通过推进螺柱实现静密封器与接入体间的联接,同时滑移环法兰盘端面上设置的环形凹槽与前后接入本体的环形凹槽对称布置且所构成的环腔中配置多边形金属环。滑移环环体的外环面和内壁上均加工有截面为矩形的环形凹槽,滑移环外环面的环形凹槽分层排列且其内填充润滑脂,而其内壁的环形凹槽内则填充玻璃胶以辅助密封;此外,滑移环环体的外环面与前后接入本体的内壁精密配合而构成移动副。
液压驱动系统用来提供周向推进动力完成前后接入本体的自动张开和闭合,同时每组推进架分别配置一套液压驱动系统而实现双动力驱动。每套液压驱动系统采用两个并行排列的独立液压缸,且通过推进架完成前后接入本体间的动力传递;所有独立液压缸的液压油经过多路换向阀统一分配,由此实现接入体和静密封器剖分单体的自动同步周向推进,同时所有独立的液压缸采用同一型号的活塞式油缸,其缸筒和活塞杆均通过长销轴分别与前后接入本体进行锚定,同时长销轴的轴端配有开口销进行固定。
该带压接入装置的水下对中和对接作业流程为,打开液压驱动系统,各液压缸通过其缸筒上的回油口和多路换向阀进行回油,后接入本体依靠液压缸提供的周向推进双动力逐渐张开,然后通过吊机继续吊装下放整套接入装置,直至前接入本体的内壁与海底管道接入管段的外环面重合为止,接着各液压缸通过其缸筒上的出油口和多路换向阀进行通油,后接入本体逐渐朝着前接入本体闭合,待前接入本体拱形锁块内的自锁块锁销滑入后接入本体U形沟槽的圆形盲孔内,实现前后接入本体的自动锁紧,由此完成水下对中作业;然后,关闭并拆卸液压驱动系统的各液压缸,前后接入本体的各组锥形凸台内装入夹紧螺柱,然后旋紧各夹紧螺柱,依靠前后接入本体所传递的夹紧压力,梯形金属圈沿径向移动并逐步与海底管道贴合后产生变形而形成金属圈密封;接着,旋紧静密封器的各推进螺柱,依靠滑移环所传递的推力,锥形金属圈和多边形金属环依次受挤压产生变形而形成双重金属密封的静密封;最后,待滑移环内壁环形凹槽内的玻璃胶凝固,完成整个水下对接作业。
该带压接入装置的水下气动自动调控系统由水下调控器和接入控制系统组成。其中,水下调控器依据气动调节以及调控球与调控座和调控盖之间的球面配合完成钻孔作业的自动关断,它包括气动阀组、支座、密封压套、矩形密封圈、○型密封圈、调控轴、调控座、调控球、调控盖和金属垫片。金属垫片采用垫片式金属环体,其外径小于调控盖左侧法兰盘的外径而其内径则大于调控球的球径;矩形密封圈和○型密封圈采用耐腐蚀和耐温性能强的密封圈,矩形密封圈的截面呈矩形。气动阀组用来提供动力并通过气压传动由调控轴带动调控球旋转而实施自动关断操作,气动阀组的下端配有联轴套;支座采用矩形筒体,其上下筒壁均钻有圆孔,并通过联接螺栓将气动阀组和调控座连为一体。
矩形密封圈和○型密封圈通过密封压套产生变形而在调控座和调控轴间形成非金属密封,密封压套采用变径环体,其内壁的上部加工有分层排列的环槽,每层环槽的腔室内配置○型密封圈;密封压套的上部采用正六边形的方体,该方体的截面所在圆面的直径小于支座上筒壁圆孔的直径,密封压套下端的调控座上通管环腔内配置有分层叠放的矩形密封圈,同时密封压套外环面的下部车制有螺纹而实现密封压套与调控座间的联接以及轴向挤压矩形密封圈并产生变形。
调控轴用来将气动阀组的动力传递至调控球,其材质选用耐磨、高强和热变形小的调质合金钢38CrMoAlA,调控轴的两端通过方径接头而上接联轴套同时下连调控球,且调控轴的轴身与密封压套的内壁精密配合而构成转动副,调控轴的轴颈与轴身截面变化处形成轴肩并用来定位矩形密封圈,轴颈的外壁上加工有分层排列的环沟,每层环沟内填充润滑脂,同时轴颈与调控座上通管的内壁精密配合而构成转动副。
调控座和调控盖之间采用金属垫片形成金属密封,调控座的上通管和左右通管以及调控盖的侧通管均采用柱形筒体,而调控座和调控盖的本体则采用球形筒体,同时调控座的左通管、调控盖的侧通管和动密封器中动密封本体同轴心布置且其内径均等于调控球的内环壁直径;调控座的右通管和调控盖的侧通管之间配置金属垫片进行密封并通过紧定螺栓联接在一起,而调控座的左通管则通过其端部的法兰盘和调控螺柱实现水下调控器与接入体间的联接。调控座和调控盖本体的内球面和调控球的球面均进行精密研磨处理,而调控座和调控盖本体的外球面进行喷漆防腐处理,同时调控球沿垂直于调控座左通管和调控盖侧通管轴线的方向上切有两个相互平行的切面,且两切面所在的圆面直径相等并均大于调控球的内环壁直径;调控座和调控盖本体的内外球面同心且与调控球的球心始终保持重合而构成球面配合,同时调控球与调控座以及调控球与调控盖间的球面结合带的轴向长度均大于调控球上两切面间距的四分之一,以充分保证调控球与调控座和调控盖之间的密封性;此外,调控座本体的内球面直径、调控座右通管的内径、调控盖本体的内球面直径均等于调控球的球径。
接入控制系统用于并流输送中远程自动调控新接入海管油气输送介质的流量并保证所输送油气的流压满足整个海底管道外输压力的需求。新接入海管中输送的油气采用电磁流量计进行精确计量,同时海底管道接入管段的管壁上设置压力变送器,通过监测并流输送后原有海底管道内的压力状况,并经气电转换器将电信号转换成气信号,自动控制新接入海管上气动控制阀的气动量,进而自动调控新接入油井产液的流量并保证整个海底管道供液的稳定。另外,在出现高高压差信号或海底管道出现堵塞时,新接入海管上的紧急关断阀会自动关闭并停止新接入油井产液的供给。
海底管道接入管段和新接入海管的管壁上设置压差变送器,通过实时监测两管段间的压差,并经气电转换器将电信号转换成气信号,自动控制新接入海管上气动控制阀的气动量,进而自动调控油气输送介质的流量并保证所输送油气的流压满足海底管道外输压力需求。
动密封器实现带压接入装置与开孔设备钻杆进给和旋转运动中的动密封,并依据填料和密封圈以及双圆盘式迷宫密封的多重密封技术将其与接入体和水下调控器相联通的内腔分隔成独立的密闭腔室,各密闭腔室内填满含冷却液和防腐剂的液体,以保证钻孔作业的顺利实施。它包括填料密封体、迷宫密封体和动密封本体,填料密封体采用法兰盘式构造,并由填料盘、压盖和填料组成,填料盘的环腔内壁采用阶梯回转面,变截面结合处用来定位压盖,压盖通过螺纹联接压紧填料而形成填料密封,填料选用油浸石棉盘根。迷宫密封体采用双圆盘式迷宫密封,并同轴心布置于动密封本体的两侧端,它由迷宫盘和迷宫环组成,迷宫盘的环腔内壁加工有沿轴向均匀排列的环形沟槽,同时迷宫环外环面的同样位置处设置相同规格尺寸的环形沟槽,各环形沟槽内填充油液且迷宫盘和迷宫环的两侧端面分别保持平齐而形成迷宫密封;迷宫环的环腔内壁布置分层排列的凹槽,各层凹槽内配置○形密封圈以辅助密封。动密封本体采用厚壁筒体,其两端的法兰盘与填料密封体的填料盘、迷宫密封体的迷宫盘以及水下调控器侧通管右侧的法兰盘均钻有相同数量和规格大小的圆形孔眼,各圆形孔眼内依次配置密封螺柱而完成动密封器各部件及其与水下调控器之间的联接。
该带压接入装置的水下接入作业流程为,打开水下调控器,并使调控座的左通管和调控盖的侧通管与调控球的内环壁同轴心布置;然后,旋紧填料密封体压盖的螺纹并压紧填料而形成填料密封,同时结合密封圈以及双圆盘式迷宫密封的多重密封技术实现带压接入装置与开孔设备钻杆间的动密封,并在动密封器与接入体和水下调控器所分隔出的各密闭腔室内填满含冷却液和防腐剂的液体;接着,将开孔设备的刀具进给至接入体的三通管段内并实施钻孔作业,海底管道接入管段上开孔结束后,将开孔设备的刀具退刀至调控盖的侧通管内;然后,启动水下调控器,气动阀组的动力通过气压传动并由气动阀组的联轴套和调控轴带动调控球旋转90°而实施自动关断操作,并使调控座左通管和调控盖侧通管的轴线与调控球的内环壁轴线垂直相交布置;接着,旋松并打开左侧迷宫密封体迷宫盘上的各密封螺柱,将动密封器随同开孔设备的刀具和钻杆一起从水下调控器上拆卸下来,然后在调控盖侧通管的管端装上新接入海管;最后,接入控制系统远程通过压力变送器和压差变送器的实时监测并经气动控制阀,自动调控并流输送中油气输送介质的流量和外输压力。
本发明所能达到的技术效果是,该带压接入装置配有两套液压驱动系统实现双动力周向驱动,并结合自锁机构和金属密封圈完成接入体在海底管道上的自动锁紧和水下对接;静密封器依据其变截面的阶梯回转体以及锥形金属圈和多边形金属环形成双重金属密封的静密封,同时动密封器依据填料和密封圈以及双圆盘式迷宫密封的多重密封技术实现水下调控器与开孔设备间的动密封;水下调控器依据气动调节以及调控球与调控座和调控盖之间的球面配合完成钻孔作业的自动关断,且接入控制系统用于并流输送中远程自动调控新接入海管油气输送介质的流量并保证所输送油气的流压满足整个海底管道外输压力的需求,由此使得该带压接入装置具备操作简便、接入时间短、施工成本低等特点,尤其适用于深水油田和边际油田海底管道油气并流不停输作业的快速接入要求。
附图说明
下面结合附图对本发明作进一步的说明,但本发明并不局限于以下实施例。
图1是根据本发明所提出的海底管道气动带压接入装置的典型结构简图。
图2是图1的左视图。
图3是海底管道气动带压接入装置中静密封器和接入体的结构简图。
图4是图3的左视图。
图5是海底管道气动带压接入装置中水下调控器的结构简图。
图6是海底管道气动带压接入装置中动密封器的结构简图。
图7是海底管道气动带压接入装置中液压驱动系统的原理图。
图8是海底管道气动带压接入装置中接入控制系统的流程图。
图9是海底管道气动带压接入装置的水下对中和对接作业流程简图。
图10是海底管道气动带压接入装置的水下接入作业流程简图。
图中1-静密封器,2-接入体,3-液压驱动系统,4-水下调控器,5-动密封器,6-前接入本体,7-后接入本体,8-推进架,9-长销轴,10-夹紧螺柱,11-液压缸,12-衬套,13-下销轴,14-自锁块,15-梯形金属圈,16-锥形金属圈,17-多边形金属环,18-滑移环,19-推进螺柱,20-气动阀组,21-支座,22-密封压套,23-矩形密封圈,24-调控轴,25-调控螺柱,26-调控座,27-调控球,28-紧定螺栓,29-调控盖,30-金属垫片,31-密封螺柱,32-迷宫密封体,33-动密封本体,34-填料密封体,35-活塞杆,36-缸筒,37-多路换向阀,38-海底管道接入管段,39-开孔设备。
具体实施方式
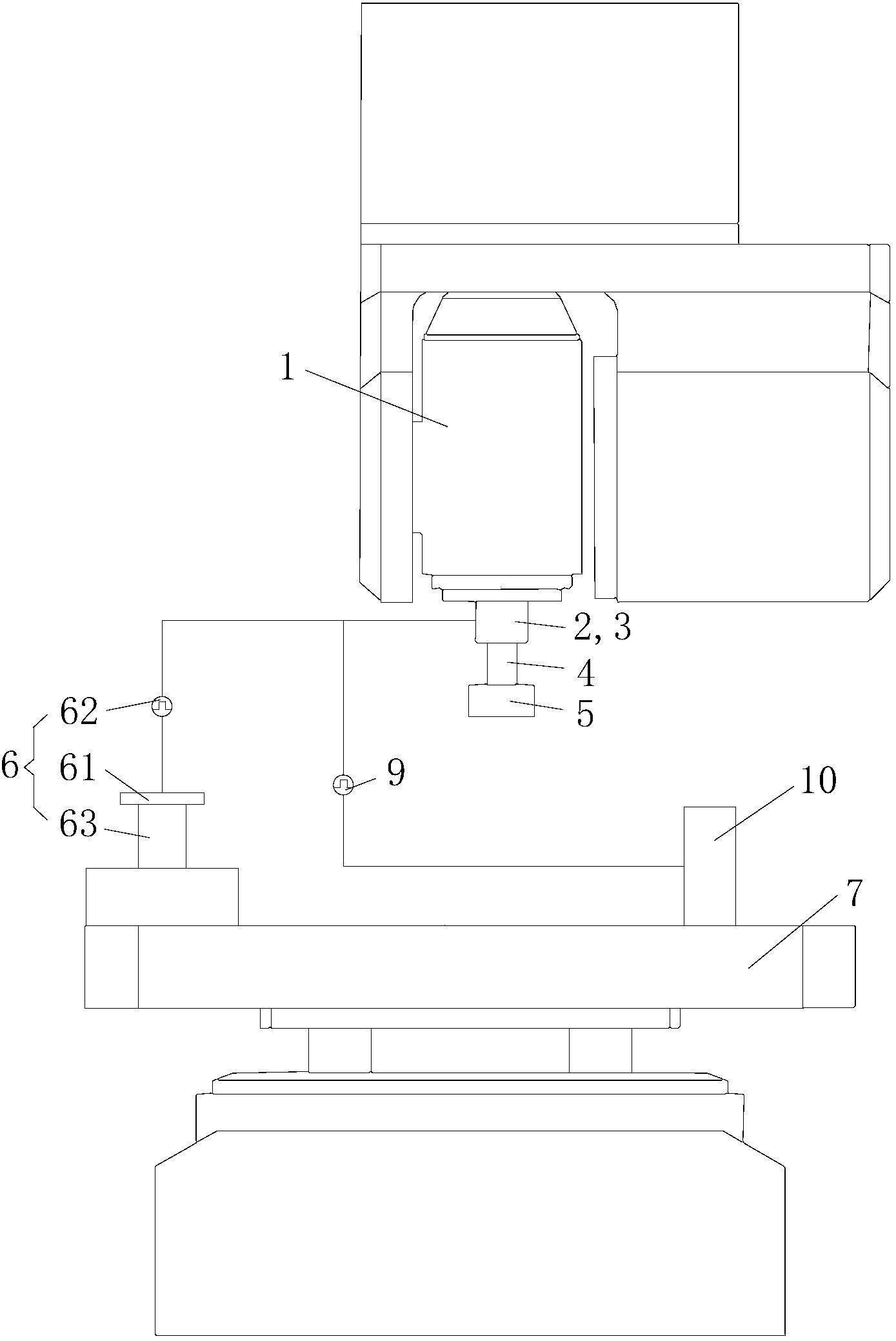
在图1和图2中,海底管道气动带压接入装置由静密封器1、接入体2、液压驱动系统3、水下调控器4、动密封器5和接入控制系统组成。该带压接入装置组装前,静密封器1、水下调控器4和动密封器5主体部件的外表面分别进行喷漆防腐处理,而接入体2的防腐则采用喷漆和加装阴极保护相结合的方式。该带压接入装置组装时,接入体2的前后接入本体通过下销轴铰接在一起并通过两套液压驱动系统3共四个液压缸进行双动力周向驱动,静密封器1与接入体2间则通过推进螺柱进行联接,同时水下调控器4通过调控螺柱左连接入体2并通过密封螺柱而右接动密封器5。
在图1和图2中,该带压接入装置调试时,静密封器1的滑移环沿接入体2的环腔内壁灵活滑移且无阻滞,接入体2自锁块应可以自动锁紧,液压驱动系统3的各液压缸可以正常的通油和回油,水下调控器4的调控轴和调控球可以灵活转动,并保持静密封器1、接入体2和动密封器5内壁的清洁;同时,依次检查水下调控器4的气动阀组和接入控制系统各阀门的开关是否正确,检查静密封器1滑移环的环形凹槽和水下调控器4调控轴的环沟内是否填充润滑脂,检查静密封器1的各金属圈和金属环、接入体2的各金属圈、水下调控器4的各密封圈和金属垫片以及动密封器5的填料和密封圈及其双圆盘式迷宫密封有无损伤,检查各销轴和螺纹联接处是否牢固且有无锈蚀。
在图1和图2中,该带压接入装置的带压接入方法依次实施水下对中和对接作业以及水下接入作业,接入体2依靠液压驱动系统3提供的周向推进动力并经自锁块实现前后接入本体的自动锁紧,接入体2通过旋紧各夹紧螺柱形成金属圈密封,同时静密封器1通过旋紧各推进螺柱而形成双重金属密封的静密封,且动密封器5依据填料和密封圈以及双圆盘式迷宫密封的多重密封技术实现动密封,水下调控器4通过气动调节完成钻孔作业的自动关断,由此完成海底管道接入管段的开孔和新接入海管的安装。
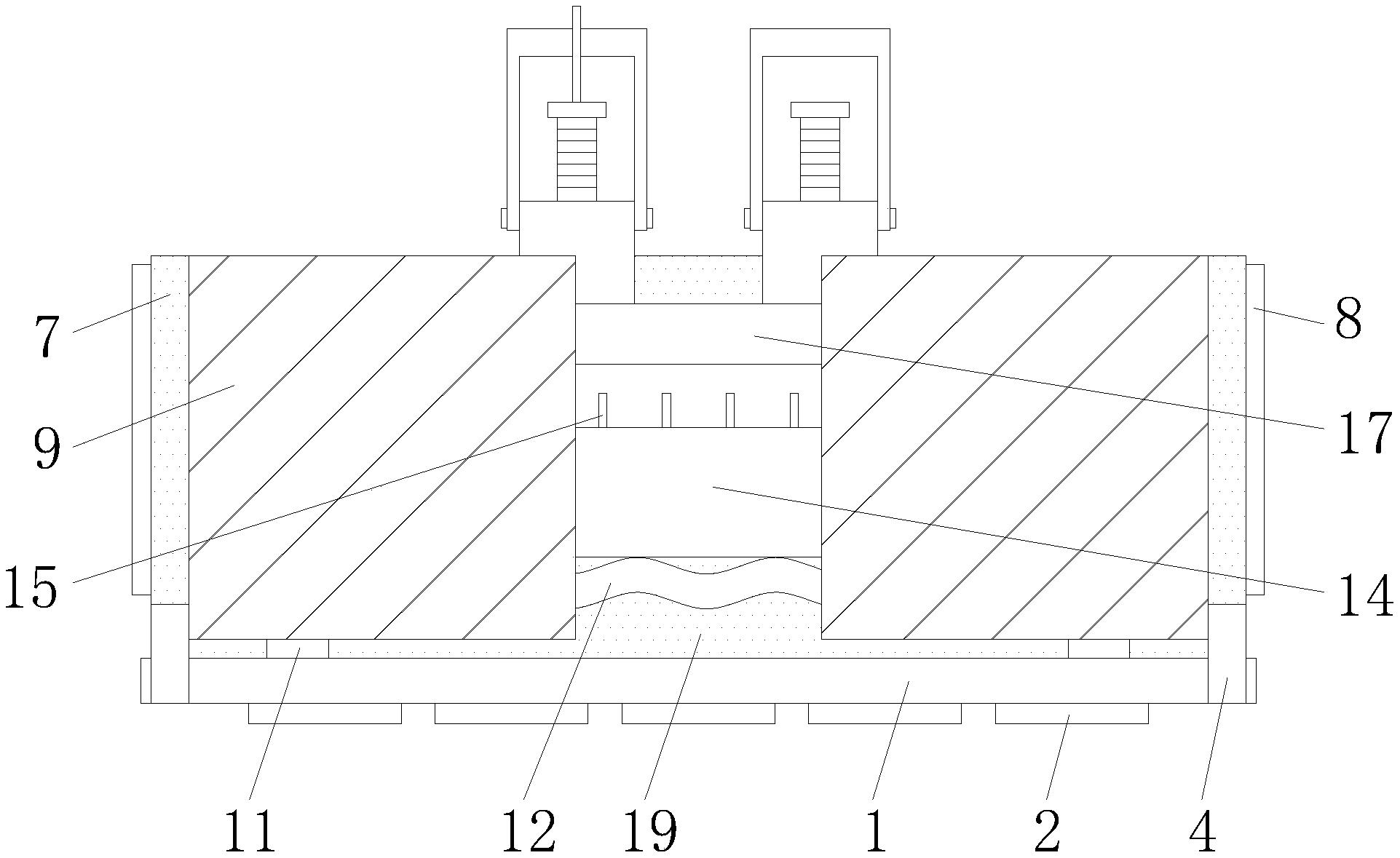
在图3和图4中,静密封器1的滑移环18以及接入体2的前接入本体6和后接入本体7的环腔内壁直径依据海底管道接入管段的外径进行调整,梯形金属圈15的规格依据海底管道中油气并流介质物性和最大输送压力进行选型,而锥形金属圈16和多边形金属环17则需要综合考虑海底管道周围海水的物性和压力以及油气并流介质物性和最大输送压力等参数进行设计,前接入本体6和后接入本体7的壁厚以及夹紧螺柱10的数量和螺纹强度依据梯形金属圈15产生最大变形所需要的夹紧压力进行设计,而推进螺柱19的数量和螺纹强度则依据滑移环18挤压锥形金属圈16和多边形金属环17产生最大变形所需推力的合力进行设计。
在图3和图4中,后接入本体7下销轴套中的衬套12和前接入本体6下销轴套中的轴套分别与下销轴13配合而实现前接入本体6和后接入本体7间的铰接,液压缸11通过长销轴9与推进架8锚定在一起而组成液压双动力驱动系统,前接入本体6和后接入本体7闭合后通过自锁块14的锁销完成自动锁紧,旋紧各推进螺柱19并通过滑移环18所传递的推力挤压锥形金属圈16和多边形金属环17而形成双重金属密封的静密封。
在图5中,调控座26的左通管、调控盖29的侧通管以及调控球27的内环壁直径依据新接入油井产液的流量以及油气并流介质物性和输送压力等参数综合设计,气动阀组20的供气压力和供气量依据调控轴24带动调控球27旋转所需要的最大扭矩值进行供应,调控座26和调控盖29的壁厚依据海底管道中油气并流介质物性和最大输送压力进行选型,紧定螺栓28的数量和螺纹强度依据金属垫片30产生最大变形所需要的夹紧压力进行设计。
在图5中,调控座26和调控盖29本体的内外球面同心且与调控球27的球心始终保持重合而构成球面配合,旋紧各紧定螺栓28并通过调控座26和调控盖29间的夹紧压力而使金属垫片30形成金属密封,矩形密封圈23和○型密封圈通过密封压套22压紧变形而形成非金属密封,调控座26的左通管通过调控螺柱25接于前接入本体6的三通管段上,而支座21则通过联接螺栓将气动阀组20和调控座26连为一体,气动阀组20的动力通过气压传动并由其联轴套和调控轴24带动调控球27旋转而实施钻孔作业后的自动关断操作。
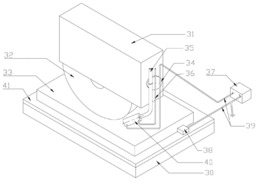
在图6中,动密封器5中动密封本体33的内径依据新接入油井产液的流量以及油气并流介质物性和输送压力等参数综合设计,迷宫密封体32的迷宫环内径和填料密封体34的压盖内径均与开孔设备钻杆的外径保持一致,迷宫密封体32和填料密封体34的规格需依据钻孔作业前海底管道中油气介质物性和最大输送压力进行选取。
在图6中,密封螺柱31用于动密封本体33与迷宫密封体32和填料密封体34之间的联接,并将动密封器5接于调控盖29的侧通管上,同时密封螺柱31也用于完成动密封器5拆卸后新接入海管与水下调控器4之间的联接;动密封器5依据填料密封体34压盖压紧填料形成的填料密封、迷宫密封体32迷宫盘和迷宫环间的迷宫密封以及○形密封圈的辅助密封而最终产生多重密封技术,并由此实现带压接入装置与开孔设备钻杆间的动密封。
在图7中,两套液压驱动系统3分别采用两个并行排列的独立液压缸11并通过多路换向阀37统一供给和分配液压油而实现双动力驱动,且活塞杆35和缸筒36均通过长销轴9而完成前接入本体6和后接入本体7间的动力联接,并依据接入体2周向回缩和推进的双向运动实施前接入本体6和后接入本体7的张开和闭合操作。
在图8中,接入控制系统通过压力变送器监测并流输送后原有海底管道内的压力并经气动控制阀自动调控新接入油井产液的流量,同时通过压差变送器实时监测海底管道接入管段和新接入海管间的压差并经气动控制阀自动调控油气输送介质的流量和外输压力。
在图9中,该带压接入装置水下对中和对接作业中的对中作业流程为,首先打开推进架8上的四个液压缸11,并经多路换向阀37统一分配液压油而由液压缸11的回油口进行回油,各活塞杆35回缩进而周向驱动后接入本体7完成张开操作,前接入本体6和后接入本体7间的开口大小需大于海底管道接入管段的外径;然后,待整套带压接入装置吊装结束后,前接入本体6套于海底管道接入管段的前部,同时水下调控器4和动密封器5的轴线与海底管道接入管段的中心对中;接着,四个液压缸11通油并使活塞杆35周向推进而完成后接入本体7的闭合操作,前接入本体6和后接入本体7的剖分面完全贴合后,依靠锁紧机构中的自锁块14实现静密封器1和接入体2与海底管道接入管段间的自动锁紧。
在图9中,该带压接入装置水下对中和对接作业中的对接作业流程为,首先关闭推进架8上的四个液压缸11,经多路换向阀37统一回收液压油后,通过水下机器人拔出各长销轴9并拆卸掉四个液压缸11;然后,通过水下机器人在前接入本体6和后接入本体7上安装夹紧螺柱10并用机械手拧紧,梯形金属圈15的各分片径向移动,待各分片间的结合处贴合后,梯形金属圈15开始逐步产生变形并形成金属圈密封;接着,通过水下机器人旋紧静密封器1的各推进螺柱19并通过滑移环18挤压锥形金属圈16和多边形金属环17,待锥形金属圈16和多边形金属环17的总轴向变形量达到Δl后形成双重金属密封的静密封,此时接入体2两侧滑移环18的轴向滑动位移也为Δl;最后,接入体2两侧滑移环18内壁环形凹槽内的玻璃胶逐渐凝固,进而辅助静密封器1进行密封和防腐。
在图10中,该带压接入装置的水下接入作业流程为,首先气动阀组20的动力通过气压传动并由调控轴24带动调控球27旋转而打开水下调控器4,装入开孔设备钻杆和刀具,通过填料密封体34形成的填料密封并结合迷宫密封体32形成的密封圈和双圆盘式迷宫密封共同构成多重密封技术,实现开孔设备39钻杆的动密封,同时在容纳开孔设备39刀具的各密闭腔室内填满含冷却液和防腐剂的液体;然后,实施开孔设备39的进给操作并通过其刀具在海底管道接入管段38上钻出所需规格尺寸的孔眼,开孔结束后实施开孔设备39的退刀操作并将其刀具退至调控盖29的侧通管内;接着,气动阀组20的动力通过气压传动并由调控轴24带动调控球27旋转而实施自动关断操作,再通过水下机器人拆卸左侧迷宫密封体32的各密封螺柱31,并将动密封器5随同开孔设备39一起吊装至海面施工船上,然后通过吊机在海底管道接入管段38的开孔部位,即水下调控器4的调控盖29上装入新接入海管,并通过水下机器人拧上各密封螺柱31;最后,并流输送生产中,油气输送介质的流量和外输压力通过接入控制系统进行远程自动调控。
上述各实施例仅用于说明本发明,其中各部件的结构、连接方式等都是可以有所变化的,凡是在本发明技术方案的基础上进行的等同变换和改进,均不应排除在本发明的保护范围之外。
海底管道气动带压接入装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0