









专利摘要
本发明涉及图像处理技术领域,提供了一种基于计算机视觉的齿轮缺陷检测方法及系统,所述方法包括下述步骤:通过PCI插槽获取图像采集卡采集到的被测齿轮的源图像;对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数;对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果。本发明实施例不仅测量速度快、而且精度高,满足了齿轮常规参数测量的功能要求,大批量工业生产过程中可以大大提高生产效率和生产的自动化程度,可满足生产实际中的测量精度要求,且测量时间仅为几秒钟,能满足工业测量中对测量速度的要求,具有较大的理论及实用价值。
权利要求
1.一种基于计算机视觉的齿轮缺陷检测方法,其特征在于,所述方法包括下述步骤:
通过PCI插槽获取图像采集卡采集到的被测齿轮的源图像;
对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数;
对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果。
2.根据权利要求1所述的基于计算机视觉的齿轮缺陷检测方法,其特征在于,所述对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数的步骤具体包括下述步骤:
将采集到的被测齿轮的24位彩色源图像进行灰度变换处理,得到8位灰度齿轮图像;
利用中值滤波算法,对所述8位灰度齿轮图像进行噪音去除;
利用图像二值化算法,对灰度齿轮图像进行阈值分割,得到分离的齿轮和背景图像。
3.根据权利要求2所述的基于计算机视觉的齿轮缺陷检测方法,其特征在于,所述对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果的步骤具体包括下述步骤:
利用填充算法,对所述二值化算法得到的齿轮图像的孔洞进行填充;
对孔洞填充后的二值化图像作为目标,确定计算所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径;
根据计算得到的所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径,对齿顶和齿根进行分离,检测齿轮轮齿缺陷,获得齿根图像和齿顶图像;
通过区域标号法,对获得的齿根图像和齿顶图像进行缺陷分析,计算齿轮的齿数,确定所述齿根和齿顶图像的缺陷区域。
4.根据权利要求3所述的基于计算机视觉的齿轮缺陷检测方法,其特征在于,所述对孔洞填充后的二值化图像作为目标,确定计算所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径的步骤具体包括下述步骤:
读入孔洞填充后的二值化图像,记录齿轮上的坐标;
在所述二值化图像上查找距离所述图像中心最远点集合和最近点集合,获取分别能包含齿轮的最小凸多边形的坐标;
根据最小凸多边形的坐标,分别绘制出凸多边形;
对所述凸多边形分别进行最小二乘法的圆曲线拟合,计算齿轮的圆心坐标、齿根圆半径和齿顶圆半径。
5.根据权利要求3所述的基于计算机视觉的齿轮缺陷检测方法,其特征在于,所述根据计算得到的所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径,对齿顶和齿根进行分离,检测齿轮轮齿缺陷,获得齿根图像和齿顶图像的步骤具体包括下述步骤:
在二值化图像中,以介于齿根圆半径与齿顶圆半径之间的某个数值为半径绘制一个计算辅助圆;
设置一蒙板图像,所述蒙板图像大小与齿轮图像大小相同,所述蒙板图像的半径等于齿顶圆半径与齿根圆半径之和的一半;
将画计算辅助圆后的齿轮图像与所述蒙板图像做差运算,得到齿顶图图像;
将所述蒙板图像与画计算辅助圆后的齿轮图像做差运算,得到齿根图图像。
6.根据权利要求3所述的基于计算机视觉的齿轮缺陷检测方法,其特征在于,所述通过区域标号法,对获得的齿根图像和齿顶图像进行缺陷分析,计算齿轮的齿数,确定所述齿根和齿顶图像的缺陷区域的步骤具体包括:
分别对获得的齿根图像和齿顶图像进行区域标记,获得伪色彩方式显示的齿根图像和齿顶图像;
对伪色彩方式显示的齿根图像和齿顶图像分别进行个数和单个面积计算;
对齿顶和齿根面积进行统计,分别求取齿顶面积和齿根面积的平均值;
通过设定面积阈值的方式,确定齿根和齿顶缺陷区域。
7.一种基于计算机视觉的齿轮缺陷检测系统,其特征在于,所述系统包括:
源图像采集模块,用于通过PCI插槽获取图像采集卡采集到的被测齿轮的源图像;
预处理操作模块,用于对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数;
形态学参数分析模块,用于对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果。
8.根据权利要求7所述的基于计算机视觉的齿轮缺陷检测系统,其特征在于,所述预处理操作模块具体包括:
灰度变换处理模块,用于将采集到的被测齿轮的24位彩色源图像进行灰度变换处理,得到8位灰度齿轮图像;
噪音去除模块,用于利用中值滤波算法,对所述8位灰度齿轮图像进行噪音去除;
阈值分割模块,用于利用图像二值化算法,对灰度齿轮图像进行阈值分割,得到分离的齿轮和背景图像。
9.根据权利要求7所述的基于计算机视觉的齿轮缺陷检测系统,其特征在于,所述形态学参数分析模块具体包括:
孔洞填充模块,用于利用填充算法,对所述二值化算法得到的齿轮图像的孔洞进行填充;
圆心半径计算模块,用于对孔洞填充后的二值化图像作为目标,确定计算所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径;
齿根图像和齿顶图像获得模块,用于根据计算得到的所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径,对齿顶和齿根进行分离,检测齿轮轮齿缺陷,获得齿根图像和齿顶图像;
缺陷分析模块,用于通过区域标号法,对获得的齿根图像和齿顶图像进行缺陷分析,计算齿轮的齿数,确定所述齿根和齿顶图像的缺陷区域;
所述圆心半径计算模块具体包括:
坐标记录模块,用于读入孔洞填充后的二值化图像,记录齿轮上的坐标;
点查找模块,用于在所述二值化图像上查找距离所述图像中心最远点集合和最近点集合,获取分别能包含齿轮的最小凸多边形的坐标;
绘制模块,用于根据最小凸多边形的坐标,分别绘制出凸多边形;
拟合计算模块,用于对所述凸多边形分别进行最小二乘法的圆曲线拟合,计算齿轮的圆心坐标、齿根圆半径和齿顶圆半径;
所述齿根图像和齿顶图像获得模块具体包括:
计算辅助圆绘制模块,用于在二值化图像中,以介于齿根圆半径与齿顶圆半径之间的某个数值为半径绘制一个计算辅助圆;
蒙板图像设置模块,用于设置一蒙板图像,所述蒙板图像大小与齿轮图像大小相同,所述蒙板图像的半径等于齿顶圆半径与齿根圆半径之和的一半;
第一差运算模块,用于将画计算辅助圆后的齿轮图像与所述蒙板图像做差运算,得到齿顶图图像;
第二差运算模块,用于将所述蒙板图像与画计算辅助圆后的齿轮图像做差运算,得到齿根图图像;
所述缺陷分析模块具体包括:
区域标记模块,用于分别对获得的齿根图像和齿顶图像进行区域标记,获得伪色彩方式显示的齿根图像和齿顶图像;
计算模块,用于对伪色彩方式显示的齿根图像和齿顶图像分别进行个数和单个面积计算;
统计模块,用于对齿顶和齿根面积进行统计,分别求取齿顶面积和齿根面积的平均值;
确定模块,用于通过设定面积阈值的方式,确定齿根和齿顶缺陷区域。
说明书
技术领域
本发明属于图像处理技术领域,尤其涉及一种基于计算机视觉的齿轮缺陷检测方法及系统。
背景技术
齿轮作为一种典型的动力传递器件,在工业发展的历程中发挥了十分重要的作用,其质量的好坏直接影响着机械产品的性能。因此,在齿轮生产制造的过程中必须对产品质量进行严格的检测和控制。由于齿轮本身的几何形状特点,对于齿崩、缺齿、齿歪等缺陷的测量过程复杂,常规的测量设备如三坐标测量机、齿轮综合误差检查仪等结构复杂,价格昂贵,对测试人员的要求也较高。现代制造业的发展对齿轮产品的缺陷检测提出了更高的要求。
目前,基于计算机视觉的齿轮检测方法一般需要首先确定齿轮的圆心坐标作为基准,因此,圆心坐标的确立直接影响到齿轮参数测量的精度,在传统的图像方法检测中,圆心中心检测算法有一般需要边缘检测方法确定齿轮的边缘,然后采用重心法、中值法及Hough变换法确定圆心。
前两种算法要求图像分布比较均匀,否则产生较大的误差;后一种算法需要逐点投票、记录,所用的时间较多,而且精度也不够高。
发明内容
本发明的目的在于提供一种基于计算机视觉的齿轮缺陷检测方法,旨在解决现有技术提供的齿轮缺陷检测算法的效率和精度较低的问题。
本发明是这样实现的,一种基于计算机视觉的齿轮缺陷检测方法,所述方法包括下述步骤:
通过PCI插槽获取图像采集卡采集到的被测齿轮的源图像;
对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数;
对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果。
作为一种改进的方案,所述对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数的步骤具体包括下述步骤:
将采集到的被测齿轮的24位彩色源图像进行灰度变换处理,得到8位灰度齿轮图像;
利用中值滤波算法,对所述8位灰度齿轮图像进行噪音去除;
利用图像二值化算法,对灰度齿轮图像进行阈值分割,得到分离的齿轮和背景图像。
作为一种改进的方案,所述对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果的步骤具体包括下述步骤:
利用填充算法,对所述二值化算法得到的齿轮图像的孔洞进行填充;
对孔洞填充后的二值化图像作为目标,确定计算所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径;
根据计算得到的所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径,对齿顶和齿根进行分离,检测齿轮轮齿缺陷,获得齿根图像和齿顶图像;
通过区域标号法,对获得的齿根图像和齿顶图像进行缺陷分析,计算齿轮的齿数,确定所述齿根和齿顶图像的缺陷区域。
作为一种改进的方案,所述对孔洞填充后的二值化图像作为目标,确定计算所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径的步骤具体包括下述步骤:
读入孔洞填充后的二值化图像,记录齿轮上的坐标;
在所述二值化图像上查找距离所述图像中心最远点集合和最近点集合,获取分别能包含齿轮的最小凸多边形的坐标;
根据最小凸多边形的坐标,分别绘制出凸多边形;
对所述凸多边形分别进行最小二乘法的圆曲线拟合,计算齿轮的圆心坐标、齿根圆半径和齿顶圆半径。
作为一种改进的方案,所述根据计算得到的所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径,对齿顶和齿根进行分离,检测齿轮轮齿缺陷,获得齿根图像和齿顶图像的步骤具体包括下述步骤:
在二值化图像中,以介于齿根圆半径与齿顶圆半径之间的某个数值为半径绘制一个计算辅助圆;
设置一蒙板图像,所述蒙板图像大小与齿轮图像大小相同,所述蒙板图像的半径等于齿顶圆半径与齿根圆半径之和的一半;
将画计算辅助圆后的齿轮图像与所述蒙板图像做差运算,得到齿顶图图像;
将所述蒙板图像与画计算辅助圆后的齿轮图像做差运算,得到齿根图图像。
作为一种改进的方案,所述通过区域标号法,对获得的齿根图像和齿顶图像进行缺陷分析,计算齿轮的齿数,确定所述齿根和齿顶图像的缺陷区域的步骤具体包括:
分别对获得的齿根图像和齿顶图像进行区域标记,获得伪色彩方式显示的齿根图像和齿顶图像;
对伪色彩方式显示的齿根图像和齿顶图像分别进行个数和单个面积计算;
对齿顶和齿根面积进行统计,分别求取齿顶面积和齿根面积的平均值;
通过设定面积阈值的方式,确定齿根和齿顶缺陷区域。
本发明另一实施例的目的在于提供一种基于计算机视觉的齿轮缺陷检测系统,所述系统包括:
源图像采集模块,用于通过PCI插槽获取图像采集卡采集到的被测齿轮的源图像;
预处理操作模块,用于对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数;
形态学参数分析模块,用于对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果。
作为一种改进的方案,所述预处理操作模块具体包括:
灰度变换处理模块,用于将采集到的被测齿轮的24位彩色源图像进行灰度变换处理,得到8位灰度齿轮图像;
噪音去除模块,用于利用中值滤波算法,对所述8位灰度齿轮图像进行噪音去除;
阈值分割模块,用于利用图像二值化算法,对灰度齿轮图像进行阈值分割,得到分离的齿轮和背景图像。
作为一种改进的方案,所述形态学参数分析模块具体包括:
孔洞填充模块,用于利用填充算法,对所述二值化算法得到的齿轮图像的孔洞进行填充;
圆心半径计算模块,用于对孔洞填充后的二值化图像作为目标,确定计算所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径;
齿根图像和齿顶图像获得模块,用于根据计算得到的所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径,对齿顶和齿根进行分离,检测齿轮轮齿缺陷,获得齿根图像和齿顶图像;
缺陷分析模块,用于通过区域标号法,对获得的齿根图像和齿顶图像进行缺陷分析,计算齿轮的齿数,确定所述齿根和齿顶图像的缺陷区域;
所述圆心半径计算模块具体包括:
坐标记录模块,用于读入孔洞填充后的二值化图像,记录齿轮上的坐标;
点查找模块,用于在所述二值化图像上查找距离所述图像中心最远点集合和最近点集合,获取分别能包含齿轮的最小凸多边形的坐标;
绘制模块,用于根据最小凸多边形的坐标,分别绘制出凸多边形;
拟合计算模块,用于对所述凸多边形分别进行最小二乘法的圆曲线拟合,计算齿轮的圆心坐标、齿根圆半径和齿顶圆半径;
所述齿根图像和齿顶图像获得模块具体包括:
计算辅助圆绘制模块,用于在二值化图像中,以介于齿根圆半径与齿顶圆半径之间的某个数值为半径绘制一个计算辅助圆;
蒙板图像设置模块,用于设置一蒙板图像,所述蒙板图像大小与齿轮图像大小相同,所述蒙板图像的半径等于齿顶圆半径与齿根圆半径之和的一半;
第一差运算模块,用于将画计算辅助圆后的齿轮图像与所述蒙板图像做差运算,得到齿顶图图像;
第二差运算模块,用于将所述蒙板图像与画计算辅助圆后的齿轮图像做差运算,得到齿根图图像;
所述缺陷分析模块具体包括:
区域标记模块,用于分别对获得的齿根图像和齿顶图像进行区域标记,获得伪色彩方式显示的齿根图像和齿顶图像;
计算模块,用于对伪色彩方式显示的齿根图像和齿顶图像分别进行个数和单个面积计算;
统计模块,用于对齿顶和齿根面积进行统计,分别求取齿顶面积和齿根面积的平均值;
确定模块,用于通过设定面积阈值的方式,确定齿根和齿顶缺陷区域。
在本发明实施例中,通过PCI插槽获取图像采集卡采集到的被测齿轮的源图像;对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数;对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果。本发明实施例不仅测量速度快、而且精度高,满足了齿轮常规参数测量的功能要求,大批量工业生产过程中可以大大提高生产效率和生产的自动化程度,可满足生产实际中的测量精度要求,且测量时间仅为几秒钟,能满足工业测量中对测量速度的要求,具有较大的理论及实用价值。
附图说明
图1是本发明实施例提供的基于计算机视觉的齿轮缺陷检测方法的实现流程图;
图2是本发明实施例提供的对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数的实现流程图;
图3是本发明实施例提供的消除图像采集带来的噪声的实现示意图;
图4a是本发明实施例提供的中值滤波处理前齿轮图像示意图;
图4b是本发明实施例提供的中值滤波处理后齿轮图像示意图;
图5a是本发明实施例提供的灰度变换直方图;
图5b是本发明实施例提供的二值化齿轮图像;
图6是本发明实施例提供的对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果的实现流程图;
图7是本发明实施例提供的孔洞填充后齿轮图像示意图;
图8是本发明实施例提供的对孔洞填充后的二值化图像作为目标,确定计算所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径的实现流程图;
图8a是本发明实施例提供的包含齿轮的最小多边形示意图;
图8b是本发明实施例提供的根据坐标拟合的圆形示意图;
图9是本发明实施例提供的根据计算得到的所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径,对齿顶和齿根进行分离,检测齿轮轮齿缺陷,获得齿根图像和齿顶图像的实现流程图;
图10a是本发明实施例提供的删除目标齿轮边缘区域的示意图;
图10b是本发明实施例提供的蒙板图像示意图;
图10c是本发明实施例提供的齿轮图像与所述蒙板图像做差运算效果示意图;
图10d是本发明实施例提供的齿轮图像与蒙板图像做差运算后伪彩色图像示意图;
图10e是本发明实施例提供的蒙板图像与齿轮图像做差运算效果示意图;
图10f是本发明实施例提供的蒙板图像与齿轮图像做差运算后伪彩色图像示意图;
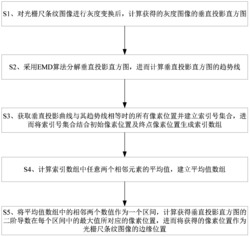
图11是本发明实施例提供的通过区域标号法,对获得的齿根图像和齿顶图像进行缺陷分析,计算齿轮的齿数,确定所述齿根和齿顶图像的缺陷区域的具体实现流程图;
图12a是发明实施例提供的标记后的齿顶图像示意图;
图12b是发明实施例提供的各齿顶图像的面积直方图;
图13是本发明实施例提供的基于计算机视觉的齿轮缺陷检测系统的结构框图;
图14是本发明实施例提供的预处理操作模块的结构框图;
图15是本发明实施例提供的形态学参数分析模块的结构框图;
图16是本发明实施例提供的圆心半径计算模块的结构框图;
图17是本发明实施例提供的齿根图像和齿顶图像获得模块的结构框图;
图18是本发明实施例提供的缺陷分析模块的结构框图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
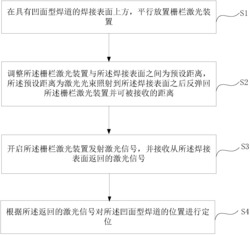
图1示出了本发明实施例提供的基于计算机视觉的齿轮缺陷检测方法的实现流程图,其具体的步骤如下所述:
在步骤S101中,通过PCI插槽获取图像采集卡采集到的被测齿轮的源图像。
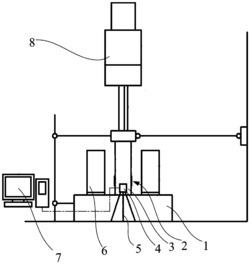
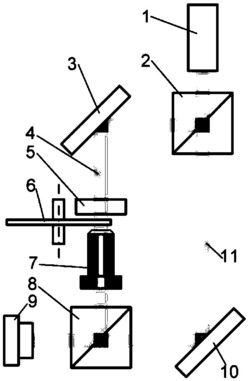
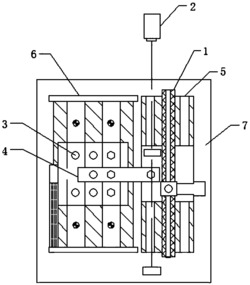
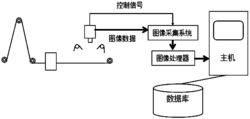
在本发明实施例中,在计算机的PCI插槽中插有图像采集卡,图像采集卡连接摄像机,摄像机对放置在工作平台上的齿轮进行摄像。
在步骤S102中,对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数。
在本发明实施例中,该被测齿轮的齿轮参数即为齿轮图像和背景图像。
在步骤S103中,对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果。
下述有详细的实施描述,在此不再赘述,但不用以限制本发明。
作为本发明的另一个实施例,图2示出了本发明实施例提供的对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数的实现流程图,其具体的步骤如下所述:
在步骤S201中,将采集到的被测齿轮的24位彩色源图像进行灰度变换处理,得到8位灰度齿轮图像。
在该步骤中,由于摄像机采集的齿轮图像是彩色图像,为了提高计算速度需要在数字化时要进行灰度化处理。结合人眼对颜色的敏感度原理,我们采用了加权平均法,即:
Y=ωR*R+ωG*G+ωB*B
其中ωR,ωG,ωB分别为颜色分量R,G,B所对应的权重,Y为灰度图对应点的像素值。
由于人眼对绿色的敏感度最高,对红色的敏感度次之,对蓝色的敏感度最低,因此使ωG>ωR>ωB,将得到较合理的灰度图像。一般常用的参数设置为ωR=0.30,ωG=0.59,ωB=0.11时,得到灰度图像的像素值为256级。
在步骤S202中,利用中值滤波算法,对所述8位灰度齿轮图像进行噪音去除。
其中,为了消除图像采集带来的噪声,本文选择采用中值滤波的方法。它是基于排序统计理论的一种能有效抑制噪声的非线性信号处理技术,其基本原理是是采用一个含有奇数个点的滑动窗口,用窗口中各点的灰度值的中值来代替窗口中心点像素的灰度值。首先确定一个奇数像元的窗口,窗口内各像素按灰度大小排队后,用其中间位置的灰度值代替窗口的中心像素值,其过程如图3所示。
用公式表示为:g(x,y)=median{f(i-k,j-l),(k,l)∈W}
其中,W为所选定的模板,所选定模板窗口大小,一般选择3×3,5×5或7×7等窗。中值滤波处理前后的图像如图4a和图4b所示。
在步骤S203中,利用图像二值化算法,对灰度齿轮图像进行阈值分割,得到分离的齿轮和背景图像。
在该步骤中,二值化处理是利用图像中要提取的目标物与其背景在灰度特性上的差异,把图像视为具有不同灰度级的两类区域(目标和背景)的组合,其关键是选择合理的分割阈值。
当一个像素的灰度值超过这个阈值,就可以说这个像素属于人们感兴趣的目标,反之则属于背景部分。
在齿轮图像中,只有一个目标与背景,而且目标与背景的灰度分布都比较均匀,那么它的直方图往往呈现为双峰曲线,如图5(a)所示。选用双峰之间的某一阈值T,就可以把图像的像素分成大于T的像素群(目标)和小于T的像素群(背景)两部分。为了提高系统的自适应能力,本文采取迭代阈值法,首先选择一个近似阈值作为估计值的初始值,然后连续不断地改进这一估计值,即利用初始值生成子图像,并根据子图像的特性来选择新的阈值,然后利用新的阈值来分割图像,此分割结果好于用初始阈值分割图像的效果。设原始图像为f(x,y),二值化后图像为g(x,y),阈值为T,则:
其中,值为1的部分表示目标齿轮,值为0的部分表示背景。二值化处理后图像如图5(b)所示。
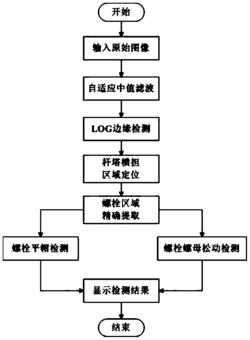
作为本发明的另一个实施例,图6示出了本发明实施例提供的对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果的实现流程图,其具体的步骤如下所述:
在步骤S301中,利用填充算法,对所述二值化算法得到的齿轮图像的孔洞进行填充。
在该步骤中,根据现场采集的图像样本分析,由于二值化后齿轮图像中存在孔洞,因此需要填充算法将齿轮图像中的孔洞消除。
其具体做法为:首先读入预处理后的二值图像(先取反),初始化参数。从多边形区域的一个内点开始,由内向外用给定的颜色画点直到边界为止。如果边界是以一种颜色指定的,则种子填充算法可逐个像素地处理直到遇到边界颜色为止。种子填充算法常用四连通域和八连通域技术进行填充操作。从区域内任意一点出发,通过上、下、左、右、左上、左下、右上和右下八个方向到达区域内的任意像素。如此反复,直到对整幅图像扫描完毕。
区域填充完成,其处理后的图像如图7所示。
在步骤S302中,对孔洞填充后的二值化图像作为目标,确定计算所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径。
其中,齿轮圆心作为齿轮参数测量的基准,精确确定被测齿轮的圆心直接关系到测量精度,其具体的步骤下述有详细说明。
在步骤S303中,根据计算得到的所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径,对齿顶和齿根进行分离,检测齿轮轮齿缺陷,获得齿根图像和齿顶图像。
其中,通过以上步骤计算出图像中齿轮的中心、齿根圆半径和齿顶圆半径后,就可以检测齿轮轮齿缺陷,其具体的步骤下述有详细说明。
在步骤S304中,通过区域标号法,对获得的齿根图像和齿顶图像进行缺陷分析,计算齿轮的齿数,确定所述齿根和齿顶图像的缺陷区域。
其中,对于以上步骤获得的齿顶图和齿根图像,通过区域标号法标记图像后,就能获得齿轮的实际几何参数,其具体的步骤下述有详细说明。
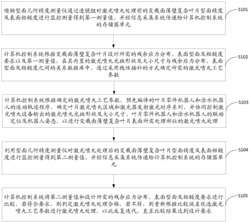
作为本发明的一个具体实施例,图8示出了本发明实施例提供的对孔洞填充后的二值化图像作为目标,确定计算所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径的实现流程图,其具体的步骤如下所述:
在步骤S401中,读入孔洞填充后的二值化图像,记录齿轮上的坐标。
在步骤S402中,在所述二值化图像上查找距离所述图像中心最远点集合和最近点集合,获取分别能包含齿轮的最小凸多边形的坐标。
在步骤S403中,根据最小凸多边形的坐标,分别绘制出凸多边形。
在步骤S404中,对所述凸多边形分别进行最小二乘法的圆曲线拟合,计算齿轮的圆心坐标、齿根圆半径和齿顶圆半径。
结合图8a和图8b,下述给出其具体的实现:
(1)读入二值图像。
(2)将处理获得二值图中的齿轮作为目标,记录齿轮上的坐标。
(3)通过在边缘图像上找出距中心最远点的集合,获得能包含齿轮的最小凸多边形的坐标。
(4)根据坐标绘制出凸多边形,进行显示。并进行类圆度检测。方法为:
(5)利用上述坐标值利用最小二乘法进行圆形曲线拟合。
(6)根据拟合的圆计算圆心(x0,y0)和齿顶圆半径rH。
(7)同样的道理,距中心最近点的集合就是齿根圆上的点,对其进行最小二乘拟合,即可得到齿根圆半径rL。
(8)分别确定拟合后的内圆和外圆。其公式为:
其中,图8a是能包含齿轮的最小多边形,根据其坐标拟合的圆形如图8b所示。
图9示出了本发明实施例提供的根据计算得到的所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径,对齿顶和齿根进行分离,检测齿轮轮齿缺陷,获得齿根图像和齿顶图像的实现流程图,其具体的步骤如下所述:
在步骤S501中,在二值化图像中,以介于齿根圆半径与齿顶圆半径之间的某个数值为半径绘制一个计算辅助圆。
在该步骤中,读入图像,初始化参数,为了计算方便,删除目标齿轮边缘区域,保留原图中纯齿轮目标图像。结果如图10a所示。
在边缘图像中,以齿轮中心孔为圆心,以介于齿根圆半径与齿顶圆半径之间的某个值为半径绘制一个计算辅助圆。假设齿顶圆半径为rH,齿根圆半径为rL。则辅助圆的半径为:
rM=α×rH+β×rL
其中α和β分别为齿顶圆和齿根圆的系数,满足条件:
0<α<1,0<β<1,且α+β=1。
在步骤S502中,设置一蒙板图像,所述蒙板图像大小与齿轮图像大小相同,所述蒙板图像的半径等于齿顶圆半径与齿根圆半径之和的一半。
其中,设置一副空白图像,大小根齿轮图像大小相同,以中心点为圆心,以rh为半径一个圆形蒙板,其中圆内像素值为1,员外像素值为0。假设α=0.5,β=0.5,则可获得的蒙板图像半径大小为:
获取的蒙板图像如图10b所示。
在步骤S503中,将画计算辅助圆后的齿轮图像与所述蒙板图像做差运算,得到齿顶图图像。
假设齿轮图像为Igear,蒙版图像为Imask,则齿顶图图像Iout表示为:
IH=Igear-Imask
运算效果如图10c所示,其中白色区域表示齿顶,其中图10d为其实际计算后的伪彩色图像。
在步骤S504中,将所述蒙板图像与画计算辅助圆后的齿轮图像做差运算,得到齿根图图像。
将蒙板图像减去齿轮图像获得齿根图像:
IL=Imask-Igear
图像运算效果如图10e所示,其中图10f为其真实计算后的伪彩色图像。
图11示出了本发明实施例提供的通过区域标号法,对获得的齿根图像和齿顶图像进行缺陷分析,计算齿轮的齿数,确定所述齿根和齿顶图像的缺陷区域的具体实现流程图,其具体的步骤如下所述:
在步骤S601中,分别对获得的齿根图像和齿顶图像进行区域标记,获得伪色彩方式显示的齿根图像和齿顶图像。
在步骤S602中,对伪色彩方式显示的齿根图像和齿顶图像分别进行个数和单个面积计算。
在步骤S603中,对齿顶和齿根面积进行统计,分别求取齿顶面积和齿根面积的平均值。
在步骤S604中,通过设定面积阈值的方式,确定齿根和齿顶缺陷区域。
上述实施例的具体的实现过程如下所述:
对于以上步骤获得的齿顶图像和齿根图像,通过区域标号法标记图像后,就能获得齿轮的实际几何参数。
区域标记的目的是给连接在一起的像素点附上相同的标记,不同的连接成分附上不同的标记。区域标记在二值图像处理中占有非常重要的地位。通过该处理将各个不同的连接区域区分开,然后就对图像中的连通区域的个数进行计数,并能分析各区域的几何参数。其具体步骤为:
(1)扫描二值图像,遇到没加标记的目标像数(白像数)P时,添加一个新的标记(label);
(2)给与P连接在一起(即相同连接成分)的像数添加相同的标记;
(3)进一步给所有与加标记像数连接在一起的像数添加相同的标记;
(4)直到连接在一起的像数全部被添加标记。这样一个连接成分就被添加了相同的标记;
(5)返回到第一步,重新查找新的没加标记的像数,重复上述各个步骤。
(6)经过标记后的齿顶图像用伪彩色方式显示如图12a所示,其中,图12a中各个齿顶图应该标记有颜色,以区分不同齿顶,图中未标记,但不用以限制本发明。
(7)根据不同的标记计算齿顶的个数和面积;
其中齿顶个数n为标记的最大值,各齿顶的面积为连通区域像素的个数,用公式表示为:
n=max(label)
area(i)=find(I==i)
(8)对个齿顶面积进行统计,其直方图表示如图12b所示,由图中看出,齿顶个数n为20个。
(9)求取齿顶面积的平均值 用公式表示为:
(10)判断缺陷区域。通过设定阈值来判断缺陷区域,判断规则为:
(11)输出分析结果。
因此,通过这种方式可以计算出齿轮的齿数,并将缺陷区域找出来。
在该实施例中,利用同样方法可以求得齿根区域的几何参数。
作为本发明的一个实施例,计算出齿顶圆半径和齿根圆半径后,可以确定齿轮模数,具体如下:
(1)初步估计模数m'。公式为:
m=(rH+rL)/n
其中,n为齿数。
(2)初步选定与比较接近的标准齿轮模数。一般可能会有2,3个这样的标准模数存在,计为,m1,m2,m3并按大小排序,假设为m1>m2>m3。
(3)与标准模数表中的模数进行比较,经过判断即可得到齿轮的实际模数。
通过以上步骤,齿轮的标准模数m就可以确定下来。
下述给出了一个具体事例对本发明实施例的技术方案进行说明:
为了验证方法的有效性,我们进行了实验,本系统采用的CCD像素个数为1280×1040,成像单元面积为4.068mm×3.686mm。其实验过程包括以下步骤:
(1)K值标定
采用一标准量块,在不改变测量参数的前提下对测量系统的测量比K=L/L0进行标定,其中L为该量块的计算机图像尺寸,以像素点个数表示,L0为该量块的标准尺寸,单位为毫米。
(2)测量
待测零件图像进入到标定好的测量系统,测得零件的图像尺寸为L1(像素数)。则该零件的测量尺寸为L2=L1K。
(3)判定
比较标准尺寸和测量尺寸,判断工件的尺寸是否在公差容许范围之内,从而对所测量的尺寸进行结果判定。
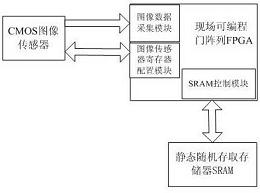
图13示出了本发明实施例提供的基于计算机视觉的齿轮缺陷检测系统的结构框图,为了便于说明,图中仅给出了与本发明实施例相关的部分。
源图像采集模块11通过PCI插槽获取图像采集卡采集到的被测齿轮的源图像;预处理操作模块12对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数;形态学参数分析模块13对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果。
作为本发明的一个具体实施例,如图14所示,所述预处理操作模块12具体包括:
灰度变换处理模块121将采集到的被测齿轮的24位彩色源图像进行灰度变换处理,得到8位灰度齿轮图像;噪音去除模块122利用中值滤波算法,对所述8位灰度齿轮图像进行噪音去除;阈值分割模块123利用图像二值化算法,对灰度齿轮图像进行阈值分割,得到分离的齿轮和背景图像。
作为本发明的一个具体实施例,如图15所示,所述形态学参数分析模块13具体包括:
孔洞填充模块131利用填充算法,对所述二值化算法得到的齿轮图像的孔洞进行填充;圆心半径计算模块132对孔洞填充后的二值化图像作为目标,确定计算所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径;齿根图像和齿顶图像获得模块133根据计算得到的所述二值化图像的圆心坐标、齿根圆半径和齿顶圆半径,对齿顶和齿根进行分离,检测齿轮轮齿缺陷,获得齿根图像和齿顶图像;缺陷分析模块134通过区域标号法,对获得的齿根图像和齿顶图像进行缺陷分析,计算齿轮的齿数,确定所述齿根和齿顶图像的缺陷区域。
作为本发明的一个具体实施例,如图16所示,所述圆心半径计算模块132具体包括:
坐标记录模块1321读入孔洞填充后的二值化图像,记录齿轮上的坐标;点查找模块1322在所述二值化图像上查找距离所述图像中心最远点集合和最近点集合,获取分别能包含齿轮的最小凸多边形的坐标;绘制模块1323根据最小凸多边形的坐标,分别绘制出凸多边形;拟合计算模块1324对所述凸多边形分别进行最小二乘法的圆曲线拟合,计算齿轮的圆心坐标、齿根圆半径和齿顶圆半径;
作为本发明的一个具体实施例,如图17所示,所述齿根图像和齿顶图像获得模块133具体包括:
计算辅助圆绘制模块1331在二值化图像中,以介于齿根圆半径与齿顶圆半径之间的某个数值为半径绘制一个计算辅助圆;蒙板图像设置模块1332设置一蒙板图像,所述蒙板图像大小与齿轮图像大小相同,所述蒙板图像的半径等于齿顶圆半径与齿根圆半径之和的一半;第一差运算模块1333将画计算辅助圆后的齿轮图像与所述蒙板图像做差运算,得到齿顶图图像;第二差运算模块1334将所述蒙板图像与画计算辅助圆后的齿轮图像做差运算,得到齿根图图像;
作为本发明的一个具体实施例,如图18所示,所述缺陷分析模块134具体包括:
区域标记模块1341分别对获得的齿根图像和齿顶图像进行区域标记,获得伪色彩方式显示的齿根图像和齿顶图像;计算模块1342对伪色彩方式显示的齿根图像和齿顶图像分别进行个数和单个面积计算;统计模块1343对齿顶和齿根面积进行统计,分别求取齿顶面积和齿根面积的平均值;确定模块1344通过设定面积阈值的方式,确定齿根和齿顶缺陷区域。
上述仅为本发明系统实施例,其各模块的功能实现如上述方法实施例所述,在此不再赘述,但不用以限制本发明。
本发明实施例基于机器视觉的齿轮参数测量系统,它通过摄像头采集图像,经过采集卡传到计算机中,结合计算机强大的数据处理能力,利用图像处理技术实现了齿轮参数的非接触测量。本发明实施例不仅测量速度快、而且精度高,满足了齿轮常规参数测量的功能要求,大批量工业生产过程中可以大大提高生产效率和生产的自动化程度,可满足生产实际中的测量精度要求,且测量时间仅为几秒钟,能满足工业测量中对测量速度的要求,具有较大的理论及实用价值。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
一种基于计算机视觉的齿轮缺陷检测方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0