

IPC分类号 : B60W10/18,B60W10/20,B60W30/045,B60W40/105,B60R16/023,H04N7/18







专利摘要
一种智能辅助驾驶汽车包括动力驱动系统、可变传动比转向系统、电子控制单元系统,电动助力转向系统、电子控制刹车系统、传感导航系统以及后轮转向系统,还包括存储于电子控制单元系统的智能转向与刹车系统控制算法;所述的存储于电子控制单元系统的智能转向与刹车系统控制算法,通过支持向量机算法和自组织学习算法,通过不断地迭代学习,得到最优的前差速器、后差速器的电控系统和电磁离合器控制系统的控制信号,最优的电动助力机控制信号,优的可变传动比转向系统五级转向比信号,最优的刹车系统制动器的控制信号,最优的电动马达的转矩控制信号。极大改善了用户对汽车的操控体验,使得汽车在不同环境条件下行驶时稳定性更高,进而提高了汽车使用的安全性与舒适度。
权利要求
1.一种智能辅助驾驶汽车,其特征在于:所述智能辅助驾驶汽车包括动力驱动系统、可变传动比转向系统、电子控制单元系统,电动助力转向系统、电子控制刹车系统、传感导航系统以及后轮转向系统,还包括存储于电子控制单元系统的智能转向与刹车系统控制算法,所述的存储于电子控制单元系统的智能转向与刹车系统控制算法,为自组织学习机器识别与预测算法;该算法存储于所述的电子控制单元系统的ROM中;所述的智能转向与刹车系统控制算法的输入为转矩传感器数字信号,所述的转向角传感器信号,所述的传感导航系统得到的初始类别数据数字信号;通过支持向量机算法,将所述的初始类别数据进行分类,得到用于自组织学习预测算法的中间输入向量;自组织学习算法以中间输入向量为输入,通过不断地迭代学习,得到最优的前差速器、后差速器的电控系统和电磁离合器控制系统的控制信号,最优的所述的电动助力转向系统包括电动助力机控制信号;最优的所述的可变传动比转向系统五级转向比信号;最优的电子控制刹车系统制动器的控制信号;最优的电动马达的转矩控制信号。
2.如权利要求1所述的智能辅助驾驶汽车,其特征在于:所述的电子控制单元系统带有一个中央处理单元、一个只读存储器 ROM,一个随机存取存储器 RAM和一个闪存存储器;所述的中央处理单元内含一个可编程逻辑控制阵列单元对车内所有电子控制单元进行控制;所述的中央处理单元内还含有一个数字信号处理器,用于收集并处理各个传感器模块信号;所述的ROM存放控制程序以及智能转向与刹车系统控制算法;所述的RAM用于数据运算;所述的闪存存储器用于存储历史数据;所述的可编程逻辑控制阵列单元统一的电子控制单元,对本发明中的动力驱动系统、可变传动比转向系统、电子控制单元系统,电动助力转向系统、电子控制刹车系统、传感导航系统以及后轮转向系统提供控制信号;所述的可编程逻辑控制阵列单元与所述数字信号处理器共用所述的ROM,RAM和闪存存储器。
3.如权利要求1所述的智能辅助驾驶汽车,其特征在于:所述的电子控制刹车系统,包括制动器,由制动器控制的左前轮制动单元,右前轮制动单元,左后轮制动单元和右后轮制动单元;还包括左前轮,右前轮,左后轮和右后轮;所述的制动器是单独对左前轮制动单元,右前轮制动单元,左后轮制动单元和右后轮制动单元进行控制;所述的制动器电控系统被连接到所述的电子控制单元系统;每个轮子刹车时的制动力大小由所述的电子控制单元系统控制。
4.如权利要求1所述的智能辅助驾驶汽车,其特征在于:所述的传感导航系统包括四组CMOS相机图像采集系统,两路轮速传感器以及一组导航系统;所述的四组CMOS相机图像采集系统,每一组含有两个CMOS相机图像采集系统;所述的四组CMOS相机图像采集系统分别安装于车的四周,可以探测到行驶区域的三维图像,所述的四组CMOS相机图像采集系统与所述的电子控制单元系统通过串行差分数据总线连接;所述的轮速传感器与所述的电子控制单元系统通过单线数据线连接,能够实时检测车速并将车速的实时信息转换为电压信号发送到所述的电子控制单元系统;所述的一组导航系统位于车顶部,与所述的电子控制单元系统通过串行数据总线连接;所述的CMOS相机图像采集系统,轮速传感器以及导航系统,以帧为单位向所述的电子控制单元系统发送数据;每一帧所述的CMOS相机图像采集系统图像数据、每一帧所述的轮速传感器速度数据与每一帧所述的导航信息数据,数据位数相同。
5.如权利要求1所述的智能辅助驾驶汽车,其特征在于:所述的后轮转向系统主要由电动马达和后轮转向舵杆和后轮转向传动杆组成,主要用于改变左后轮和右后轮轮胎操舵角度;所述的电动马达连接到所述的电子控制单元系统;所述的电子控制单元系统根据不同行驶条件控制所述的电动马达的转矩;所述的电动马达的转距通过后轮转向舵杆,带动后轮传动杆分别控制左后轮和右后轮速度。
说明书
技术领域
本发明涉及汽车安全领域,特别涉及一种智能转向及刹车系统。
背景技术
电动助力转向系统(EPS)英文全称是Electronic Power Steering,简称EPS,它利用电动机产生的动力协助驾车者进行动力转向。EPS的构成,不同的车尽管结构部件不一样,但大体雷同。一般是由转矩(转向)传感器、电子控制单元、电动机、减速器、机械转向器、以及畜电池电源所构成。主要工作原理汽车在转向时,转矩(转向)传感器会“感觉”到转向盘的力矩和拟转动的方向,这些信号会通过数据总线发给电子控制单元,电控单元会根据传动力矩、拟转的方向等数据信号,向电动机控制器发出动作指令,从而电动机就会根据具体的需要输出相应大小的转动力矩,从而产生了助力转向。如果不转向,则本套系统就不工作,处于standby(休眠)状态等待调用。由于电动助力转向的工作特性,你会感觉到开这样的车,方向感更好,高速时更稳,俗话说方向不发飘。又由于它不转向时不工作,所以,也多少程度上节省了能源。一般高档轿车使用这样的助力转向系统的比较多。而当下面临的主要问题是,面对日益复杂的汽车行驶环境,如何采取有效的电动助力,从而使得用户无论在任何行驶环境下均能获得较好的操控体验。
面对多种多样的行驶环境,通过计算机技术对汽车自身行驶数据的挖掘,对汽车行驶外部环境信息的挖掘,将使得上述问题迎刃而解。机器学习(Machine Learning)是一门多领域交叉学科,涉及概率论、统计学、逼近论、凸分析、算法复杂度理论等多门学科。专门研究计算机怎样模拟或实现人类的学习行为,以获取新的知识或技能,重新组织已有的知识结构使之不断改善自身的性能。它是人工智能和大数据技术的核心之一,是使计算机具有智能的根本途径,其应用遍及人工智能的各个领域,它主要使用归纳、综合而不是演绎。就是从各种类型的数据中快速获得有价值信息的技术。大数据领域已经涌现出了大量新的技术,它们成为大数据采集、存储、处理和呈现的有力武器。大数据处理关键技术一般包括:大数据采集、大数据预处理、大数据存储及管理、大数据分析及挖掘、大数据展现和应用(大数据检索、大数据可视化、大数据应用、大数据安全等)。而近年来新兴并日益成熟的支持向量机与自组织学习理论与技术在智能控制领域日益扮演着重要角色。
发明内容
一种智能辅助驾驶汽车包括动力驱动系统、可变传动比转向系统、电子控制单元系统,电动助力转向系统、电子控制刹车系统、传感导航系统以及后轮转向系统,还包括存储于电子控制单元系统的智能转向与刹车系统控制算法。
所述的电子控制单元系统带有一个中央处理单元、一个只读存储器 (ROM),一个随机存取存储器 (RAM)和一个闪存存储器。所述的中央处理器单元芯片内含一个可编程逻辑控制阵列单元对车内所有电子控制单元进行控制;所述的中央处理芯片内还含有一个数字信号处理器,用于收集并处理各个传感器模块信号;所述的ROM存放控制程序以及EPS系统控制算法;所述的RAM用于数据运算;所述的闪存存储器用于存储历史数据。所述的可编程逻辑控制阵列单元统一的电子控制单元,对本发明中的动力驱动系统、可变传动比转向系统、电子控制单元系统,电动助力转向系统、电子控制刹车系统、传感导航系统以及后轮转向系统提供控制信号。
所述的动力驱动系统包括发动机和差速器系统。所述的发动机采用内燃机或纯电动电机或两者之间匹配的混合动力车辆。所述的发动机通过曲轴与差速器系统。所述的差速器系统包括中心差速器、前差速器和后差速器,通过配置分布发动机的扭矩,并通过所述的发动机连接的曲轴用以控制刹车或驱动力的变化。所述的中心差速器、前差速器和后差速器相适配,其中中心差速器和所述的前后差速器通过传动轴连接。前差速器和后差速器的动力由所述的发动机路由中心差速器提供。所述的中心差速器为自锁差速器。所述的前差速器、后差速器的电控系统和电磁离合器控制系统是由所述的电子控制单元系统控制。
所述的可变传动比转向系统,通过上转轴与方向盘连接,通过下转轴与所述的电动助力转向系统连接。所述的可变传动比转向系统能根据车速变化以及路况改变方向盘的齿轮比,始终对前轮转向角进行稳健的控制。所述的可变传动比转向系统包括五级转向比。转向比的选择通过所述的电子控制单元系统所述的智能转向与刹车系统控制算法,根据车速、具体路况以及历史数据控制。所述的转向系统通过上转轴与方向盘连接,通过下转轴与所述的电动助力转向系统连接。
所述的电动助力转向系统包括电动助力机,两路转矩传感器、两路转向角传感器。所述的两路转矩传感器分时向所述的电子控制单元系统发送转矩数据,两路转向角传感器分时向店址控制系统发送转向盘的转向数据,将对应的电压信号输送到所述的电子控制单元系统,所述的电子控制单元系统根据转矩传感器检测到的转距电压信号、转动方向、路况信息和车速信号等,通过所述的智能转向与刹车系统控制算法向电动助力机发出指令,使电动助力机输出相应大小和方向的转向助力转矩,从而产生辅助动力。
所述的电子控制刹车系统,包括制动器,由制动器控制的左前轮制动单元,右前轮制动单元,左后轮制动单元和右后轮制动单元。还包括左前轮,右前轮,左后轮和右后轮。其中,所述的制动器是单独对左前轮制动单元,右前轮制动单元,左后轮制动单元和右后轮制动单元进行控制。所述的制动器电控系统被连接到所述的电子控制单元系统。每个轮子刹车时的制动力大小由所述的电子控制单元系统控制。
所述的传感导航系统包括四组CMOS相机图像采集系统,两路轮速传感器以及一组导航系统。所述的四组CMOS相机图像采集系统,每一组含有两个CMOS相机图像采集系统;所述的四组CMOS相机图像采集系统分别安装于车的四周,可以探测到行驶区域的三维图像,所述的四组CMOS相机图像采集系统与所述的电子控制单元系统通过串行差分数据总线连接。所述的轮速传感器与所述的电子控制单元系统通过单线数据线连接,能够实时检测车速并将车速的实时信息转换为电压信号发送到所述的电子控制单元系统。所述的一组导航系统位于车顶部,与所述的电子控制单元系统通过串行数据总线连接。所述的CMOS相机图像采集系统,轮速传感器以及导航系统,以帧为单位向所述的电子控制单元系统发送数据。每一帧所述的CMOS相机图像采集系统图像数据、每一帧所述的轮速传感器速度数据与每一帧所述的导航信息数据,数据位数相同。
所述的后轮转向系统,主要用于改变左后轮和右后轮轮胎操舵角度。所述的后轮转向系统主要由电动马达和后轮转向舵杆和后轮转向传动杆组成,所述的电动马达连接到所述的电子控制单元系统。所述的电子控制单元系统根据不同行驶条件控制所述的电动马达的转矩。所述的电动马达的转距通过后轮转向舵杆,带动后轮传动杆分别控制左后轮和右后轮速度。
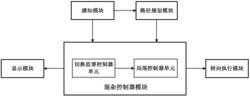
所述的存储于电子控制单元系统的智能转向与刹车系统控制算法,为自组织学习机器识别与预测算法。该算法存储于所述的电子控制单元系统的ROM中。所述的智能转向与刹车系统控制算法的输入为所述的转矩传感器,所述的转向角传感器,所述的传感与导航系统得到的初始类别数据。通过支持向量机算法,将所述的初始类别数据进行分类,得到用于自组织学习预测算法的中间输入向量。自组织学习算法以中间输入向量为输入,通过不断地迭代学习,得到所述的前差速器、后差速器的电控系统和电磁离合器控制系统的控制信号,得到所述的电动助力转向系统包括电动助力机控制信号;得到所述的可变传动比转向系统五级转向比信号;得到子控制刹车系统制动器的控制信号;得到所述的电动马达的转矩控制信号。
附图说明
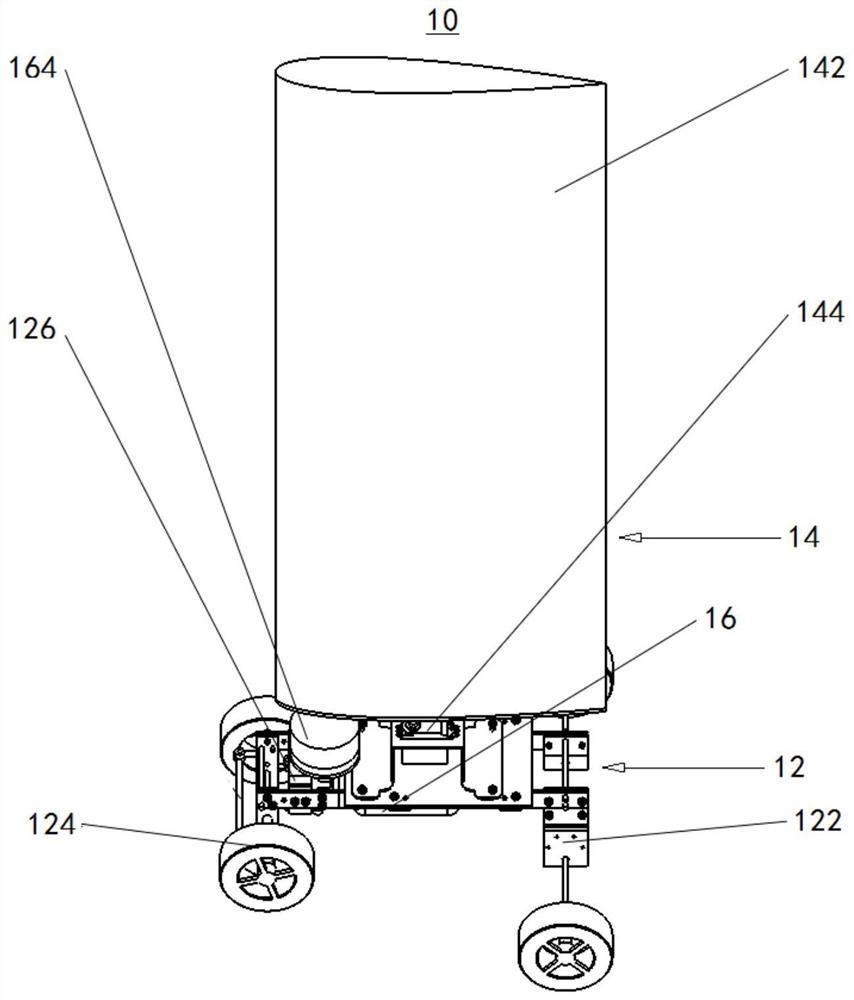
图1 本发明的结构示意图。
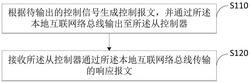
图2 智能转向与刹车系统控制算法示意图。
具体实施方式
下面结合实施例与附图来具体说明本发明。
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
一种智能辅助驾驶汽车包括动力驱动系统、可变传动比转向系统、电子控制单元系统,电动助力转向系统、电子控制刹车系统、传感导航系统以及后轮转向系统,还包括存储于电子控制单元系统的智能转向与刹车系统控制算法。
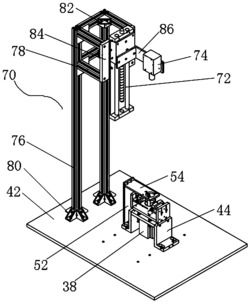
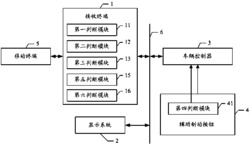
所述的电子控制单元系统如图1所示(100)带有一个中央处理单元(CPU)、一个只读存储器 (ROM)和一个随机存取存储器 (RAM)、一个闪存存储器。所述的中央处理器单元芯片内含一个可编程逻辑控制阵列单元对车内所有电子控制单元进行控制;所述的中央处理芯片内还含有一个数字信号处理器,用于收集并处理各个传感器模块信号;所述的ROM存放控制程序以及EPS系统控制算法;所述的RAM用于数据运算;所述的闪存存储器用于存储历史数据。所述的可编程逻辑控制阵列单元统一的电子控制单元,对本发明中的动力驱动系统、可变传动比转向系统、电子控制单元系统,电动助力转向系统、电子控制刹车系统、传感导航系统以及后轮转向系统提供控制信号。
所述的动力驱动系统包括发动机和差速器系统。所述的发动机如图1所示(200)采用内燃机或纯电动电机或两者之间匹配的混合动力发动机。所述的发动机通过曲轴与差速器系统如图1所示(300)连接。所述的差速器系统如图1所示(300)包括中心差速器如图1所示(310)、前差速器如图1所示(320)和后差速器如图1所示(330),通过配置分布发动机的扭矩,并通过所述的发动机连接的曲轴用以控制刹车或驱动力的变化。所述的中心差速器、前差速器和后差速器相适配,其中中心差速器和所述的前后差速器通过传动轴如图1所示(1)连接。前差速器和后差速器的动力由所述的发动机路由中心差速器提供。所述的中心差速器为自锁差速器。所述的中心差速器可以与任何变速器、分动器实现匹配,与车辆其它安全控制系统ABS、TCS(Traction Control Systems,牵引力控制)、SCS(Stability ControlSystems,车身稳定控制)、电动助力转向系统相容。所述的中心差速器是纯机械结构,在车轮刚一打滑的瞬间就会发生作用,它具有线性锁止特性,是真正的恒时四驱,在平时正常行驶时扭矩前后分配比是50∶50。无论如何,所述的中心差速器只要能分布发动机的扭矩到前轮和后轮的各种实现方案,不管是公开未知的都为本发明的保护范围。所述的前差速器将动力分别传递给两个驱动轮,可以实现左右两个车轮间转速不同。其输出扭矩由电磁离合器的电控控制连续控制,并且扭矩的分配比率是根据前差速器的物理和电子配置,在系统预先设定可调整的范围内进行连续调节。前差速器的电控系统和电磁离合器的控制系统是由所述的电子控制单元系统控制。所述的后差速器同所述的前差速器的原理一样,将动力分别传递给两个驱动轮,可以实现左右两个车轮间转速不同。其输出扭矩由电磁离合器的电控控制连续控制,并且扭矩的分配比率是根据前差速器的物理和电子配置,在系统预先设定可调整的范围内进行连续调节。所述的前差速器、后差速器的电控系统和电磁离合器控制系统是由所述的电子控制单元系统控制。
所述的可变传动比转向系统,通过上转轴如图1所示(3)与方向盘如图1所示(2)连接,通过下转轴如图1所示(4)与所述的电动助力转向系统如图1所示(EPS)连接。所述的可变传动比转向系统能根据车速变化以及路况改变方向盘的齿轮比,始终对前轮转向角进行稳健的控制。所述的可变传动比转向系统包括五级转向比。转向比的选择通过所述的电子控制单元系统内部的智能转向与刹车系统控制算法,根据车速、具体路况以及历史数据控制。所述的转向系统通过上转轴与方向盘连接,通过下转轴与所述的电动助力转向系统如图1所示(EPS)连接。
所述的电动助力转向系统包括电动助力机如图1所示(EPS),两路转矩传感器如图1所示(6)、两路转向角传感器如图1所示(7)。所述的两路转矩传感器分时向所述的电子控制单元系统发送转矩数据,两路转向角传感器分时向电子控制单元系统发送转向盘的转向数据,将对应的电压信号输送到所述的电子控制单元系统,所述的电子控制单元系统根据转矩传感器检测到的转距电压信号、转动方向、路况信息和车速信号等,通过所述的智能转向与刹车系统控制算法向电动助力机发出指令,使电动助力机输出相应大小和方向的转向助力转矩,从而产生辅助动力。
所述的电子控制刹车系统如图1所示(600),包括制动器如图1所示(610),由制动器控制的左前轮制动单元,右前轮制动单元,左后轮制动单元和右后轮制动单元如图1所示(620);还包括左前轮,右前轮,左后轮和右后轮。其中,所述的制动器是单独对左前轮制动单元,右前轮制动单元,左后轮制动单元和右后轮制动单元进行控制。所述的制动器电控系统被连接到所述的电子控制单元系统。所述的制动器由主缸、电油泵、和管理系统组成,其中每个管路上再制动力配置的一个电磁阀,通过电磁阀对主缸进行控制。每个轮子刹车时的制动力大小由所述的电子控制单元系统控制。
所述的传感导航系统包括四组CMOS相机图像采集系统如图1所示(8),两路轮速传感器如图1所示(9)以及一组导航系统如图1所示(700)。所述的四组CMOS相机图像采集系统,每一组含有两个CMOS相机图像采集系统;所述的四组CMOS相机图像采集系统分别安装于车的四周,可以探测到行驶区域的三维图像,所述的四组CMOS相机图像采集系统与所述的电子控制单元系统通过串行差分数据总线连接。所述的轮速传感器与所述的电子控制单元系统通过单线数据线连接,能够实时检测车速并将车速的实时信息转换为电压信号发送到所述的电子控制单元系统。所述的导航系统位于车顶部,能够提供包括关于行车位置、路类型、路宽度、车道的数量,限速、路形状,红绿灯,在行驶路段附近被安置的探测设备,路况及环境信息。所述的导航系统与所述的电子控制单元系统通过串行数据总线连接。所述的CMOS相机图像采集系统,轮速传感器以及导航系统,以帧为单位向所述的电子控制单元系统发送数据。每一帧所述的CMOS相机图像采集系统图像数据、每一帧所述的轮速传感器速度数据与每一帧所述的导航信息数据,数据大小相同。
所述的后轮转向系统,主要由电动马达如图1所示(800)和后轮转向舵杆如图1所示(20)和后轮转向传动杆如图1所示(21)组成,用于改变左后轮和右后轮轮胎操舵角度。所述的电动马达连接到所述的电子控制单元系统。所述的电子控制单元系统根据不同行驶条件控制所述的电动马达的转矩。所述的电动马达的转距通过后轮转向舵杆,带动后轮传动杆分别控制左后轮和右后轮速度。
所述的存储于电子控制单元系统的智能转向与刹车系统控制算法,为自组织学习机器识别与预测算法,算法代码存储于所述的电子控制单元系统的ROM中。所述的智能转向与刹车系统控制算法的输入为所述的转矩传感器数字信号,所述的转向角传感器数字信号,所述的传感与导航系统得到的初始类别数据数字信号。通过支持向量机算法,将所述的初始类别数据进行分类,得到用于自组织学习预测算法的中间输入向量。自组织学习算法以中间输入向量为输入,通过不断地迭代学习,得到所述的前差速器、后差速器的电控系统和电磁离合器控制系统的控制信号,得到所述的电动助力转向系统包括电动助力机控制信号;得到所述的可变传动比转向系统五级转向比信号;得到刹车系统制动器的控制信号;得到所述的电动马达的转矩控制信号,该算法流程图如图2所示。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
本发明实施例提供的技术方案带来的有益效果是:优化了用户对汽车的操控体验,使得汽车在不同环境条件下行驶时稳定性更高,进而提高了汽车使用的安全性与舒适度。
一种智能辅助驾驶汽车专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0