











专利摘要
本发明公开了一种具有防侧翻功能的无人驾驶系统,包括防侧翻执行机构、控制模块、气体发生模块和传感器单元,防侧翻执行机构对称安装于车架两侧,包括气室壳体,气室壳体固定安装在车架上,滑动盒通过横向滑动通道滑动设置于气室壳体中,气室壳体靠车体外侧的上部设有喷气口,滑动盒连接并驱动平移传动机构平移,平移传动机构还连接转移连杆一端和喷气开闭机构驱动二者随滑动盒一同运动,支撑物射出机构设在气室壳体上,气体发生模块设于滑动盒内。本发明通过多种反侧翻动作连续被执行从而达到优于现有技术的防侧翻效果,同时射出的支撑物侧向实际伸出长度较小,减少发生二次妨害几率的同时,防侧翻效果也较好。
权利要求
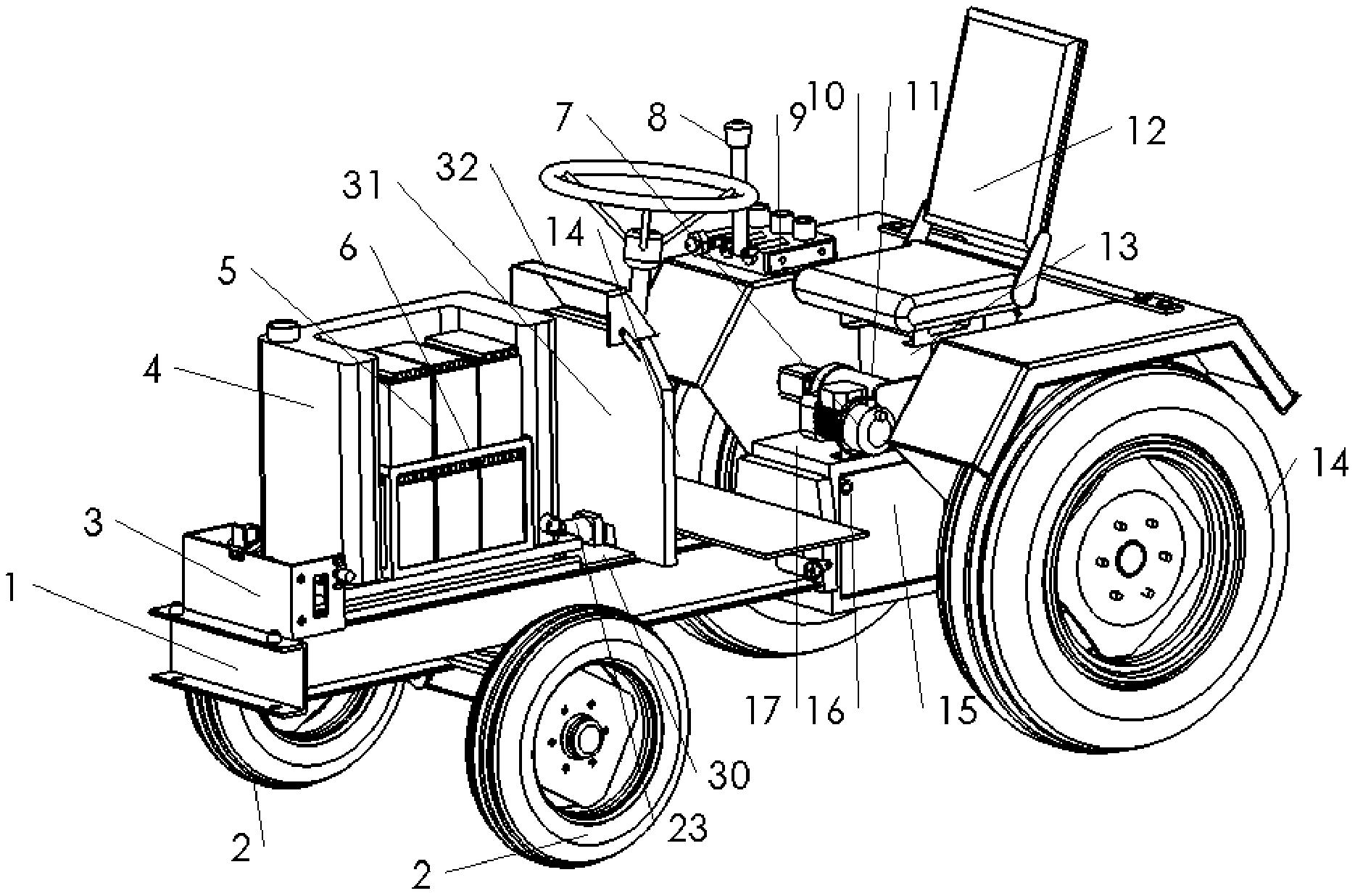
1.一种具有防侧翻功能的无人驾驶系统,包括防侧翻执行机构、控制模块、气体发生模块和传感器单元,所述传感器单元用于检测车身的侧倾角和侧向加速度,其特征在于:所述防侧翻执行机构对称安装于车架(1)两侧,包括气室壳体(7)、滑动盒(9)、重心转移机构(4)、喷气开闭机构(3)、平移传动机构(5)和支撑物射出机构(6),所述气室壳体(7)固定安装在所述车架(1)上,所述滑动盒(9)通过横向滑动通道(8)滑动设置于所述气室壳体(7)中,所述气室壳体(7)靠车体外侧的上部设有喷气口(71),所述喷气开闭机构(3)设于所述气室壳体(7)外用于开关所述喷气口(71),所述重心转移机构(4)包括连接在所述车架(1)和车桥(2)之间的转移连杆(41),所述重心转移机构(4)还包括固定在所述车架(1)的横梁下面的安装座(42),所述转移连杆(41)上部设有与所述安装座(42)转动连接的连杆轴,所述滑动盒(9)连接并驱动所述平移传动机构(5)平移,平移传动机构(5)还连接所述转移连杆(41)一端和所述喷气开闭机构(3)驱动二者随所述滑动盒(9)一同运动,所述支撑物射出机构(6)设在所述气室壳体(7)上,所述气体发生模块设于所述滑动盒(9)内,所述滑动盒(9)两端均设有电动门,所述控制模块根据侧向加速度判断汽车转弯的方向,并控制与转弯时内侧方向相同一侧的电动门为关闭状态而另一侧的电动门为打开状态。
2.根据权利要求1所述的一种具有防侧翻功能的无人驾驶系统,其特征在于:所述横向滑动通道(8)的两端分别设有靠近车体中心的内限位结构和远离车体中心的外限位结构用于阻止所述滑动盒(9)运动,所述滑动盒(9)在所述防侧翻执行机构未启动前位于距离内限位结构较近的位置,所述转移连杆(41)在所述滑动盒(9)移动到所述外限位结构时的转动幅度大于在所述滑动盒(9)移动到所述内限位结构时的转动幅度,车体的重心朝所述滑动盒(9)滑动方向的斜下方运动。
3.根据权利要求2所述的一种具有防侧翻功能的无人驾驶系统,其特征在于:所述平移传动机构(5)包括横向设置穿入所述气室壳体(7)进入所述横向滑动通道(8)的滑动杆(52)、固定在所述车架(1)上的导向套(51)、固定在所述滑动杆(52)下面的驱动架(54)和连接所述喷气开闭机构(3)的驱动轴(53),所述滑动杆(52)与所述横向滑动通道(8)同向并固定连接到所述滑动盒(9),所述驱动架(54)包括与所述车架(1)横梁同向伸出并与所述转移连杆(41)的上端连接的驱动杆(55)。
4.根据权利要求3所述的一种具有防侧翻功能的无人驾驶系统,其特征在于:所述气室壳体(7)靠车体外的一侧为半圆弧面(73),所述弧形导轨(31)固定在所述半圆弧面(73)的上部外侧,所述喷气开闭机构(3)包括弧形导轨(31)、滑动连接在所述弧形导轨(31)上并能在转动后封住所述喷气口(71)的弧形封板(32)、转动连接在所述气室壳体(7)前后端端面的转动件(33)和转动连杆(34),所述转动连杆(34)一端与所述转动件(33)转动连接而另一端设有沿自身长度方向延伸的条形滑槽(35),所述驱动轴(53)与所述条形滑槽(35)滑动连接且能相对转动,所述弧形封板(32)与所述转动件(33)固定连接,在初始状态下,所述驱动轴(53)位于所述条形滑槽(35)靠近车体中心一端。
5.根据权利要求4所述的一种具有防侧翻功能的无人驾驶系统,其特征在于:所述滑动通道包括通道导轨(83)和通道壳体(81),所述内限位结构为所述气室壳体(7)中靠所述车体内侧的盖板(72),所述盖板(72)上设有与所述滑动杆(52)滑动配合并内设密封圈的滑动套,所述外限位结构为设于所述通道导轨(83)远离车体中心一端的端部凸出部(84),所述通道壳体(81)一端接触所述盖板(72)而另一端通过能被高压气体冲开的可破坏封板(82)封闭。
6.根据权利要求5所述的一种具有防侧翻功能的无人驾驶系统,其特征在于:所述气室壳体(7)靠车体外侧的下部设有射出口(74),所述支撑物射出机构(6)包括支撑物、可解锁的固定结构和防止所述支撑物逆向滑动的导向结构(62),所述支撑物包括支撑杆(61)和固定在所述支撑杆(61)端部的端板(63),所述射出口(74)通过所述固定结构连接所述端板(63),所述导向结构(62)固定在所述气室壳体(7)上并与所述支撑杆(61)连接。
7.根据权利要求6所述的一种具有防侧翻功能的无人驾驶系统,其特征在于:所述导向结构(62)包括固定在所述气室壳体(7)上面的套管(621)和设于所述套管(621)侧面的止逆结构,所述支撑杆(61)与所述套管(621)滑动插接,所述支撑杆(61)侧面沿长度方向布设有若干止逆凸起(611),所述止逆凸起(611)的下部为斜面而上部为垂直于所述长度方向的平面,所述止逆结构包括固定在所述套管(621)侧面的止逆壳(622)、滑动连接在所述止逆壳(622)内的插接件(623)以及压簧(624),所述止逆壳(622)垂直于所述套管(621),所述止逆壳(622)底部与所述插接件(623)之间连接有所述压簧(624),所述插接件(623)伸出端插入所述套管(621)并具有与所述止逆凸起(611)相配合的结合部。
8.根据权利要求7所述的一种具有防侧翻功能的无人驾驶系统,其特征在于:所述滑动盒(9)上设有驱动两个所述电动门的驱动装置,所述驱动装置包括门控制电机(93)、齿轮机构(94)和升降门板(92),所述升降门板(92)滑动连接在所述滑动盒(9)的两端,所述升降门板(92)上固定有竖直设置的齿条,所述齿轮机构(94)包括安装在所述门控制电机(93)上的主动齿轮、与主动齿轮啮合且大小相等的变向齿轮和一对传动齿轮,所述传动齿轮分别啮合到所述主动齿轮和所述变向齿轮,两侧的齿条分别与对应侧的传动齿轮啮合。
一种具有防侧翻功能的无人驾驶系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0