





专利摘要
本发明公开一种微小角位移旋转机器人,包括触手盘和摩擦基杆,摩擦基杆有两个,对称的布置在触手盘的两侧;触手盘中设有第一压电陶瓷驱动器(14),当对触手盘中的第一压电陶瓷驱动器施加激励时,第一压电陶瓷驱动器(14)将产生逆压电效应,使触手盘的半径扩张,并与两侧的摩擦基杆接触;两侧的摩擦基杆通过设置在内部的第二压电陶瓷驱动器(24)驱动平行反向进给,利用静摩擦力产生扭矩,驱动触手盘产生角位移。具有上述结构的该种微小角位移旋转机器人突破MEMS研究领域对于尺蠖效应的常规应用,将尺蠖运动机理变型后,并应用于旋转运动,提升高精度角位移分辨力的运动机理是对传统旋转驱动方式局限的突破。
权利要求
1.一种微小角位移旋转机器人,其特征在于:所述的机器人包括触手盘和摩擦基杆,摩擦基杆有两个,对称的布置在触手盘的两侧;触手盘中设有第一压电陶瓷驱动器(14),当对触手盘中的第一压电陶瓷驱动器施加激励时,第一压电陶瓷驱动器(14)将产生逆压电效应,使触手盘的半径扩张,并与两侧的摩擦基杆接触;两侧的摩擦基杆通过设置在内部的第二压电陶瓷驱动器(24)驱动平行反向进给,利用静摩擦力产生扭矩,驱动触手盘产生角位移。
2.根据权利要求1所述的一种微小角位移旋转机器人,其特征在于:所述的旋转机器人的一个完整运动周期是,第一压电陶瓷驱动器(14)受到激励→触手盘半径扩张→触手盘与摩擦基杆接触→第二压电陶瓷驱动器(24)受到激励→触手盘两侧的摩擦基杆平行反向进给产生扭矩→触手盘旋转→第一压电陶瓷驱动器激励消失→触手盘半径恢复→触手盘与两侧摩擦基杆分离→摩擦基杆激励消失→两侧摩擦基杆恢复初始位置。
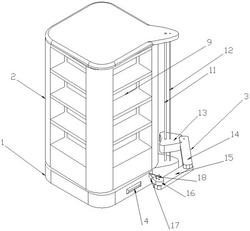
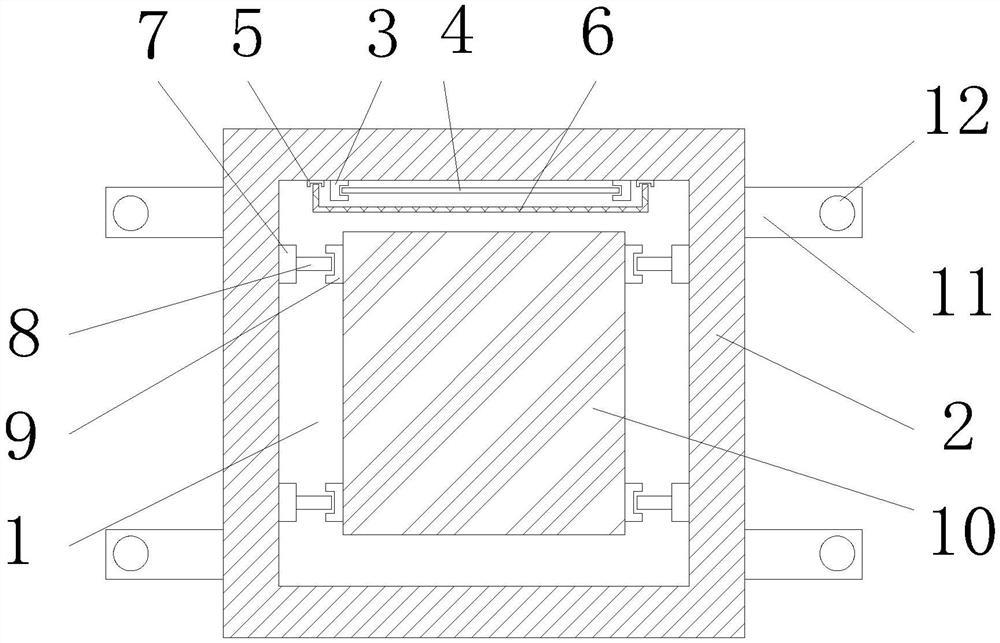
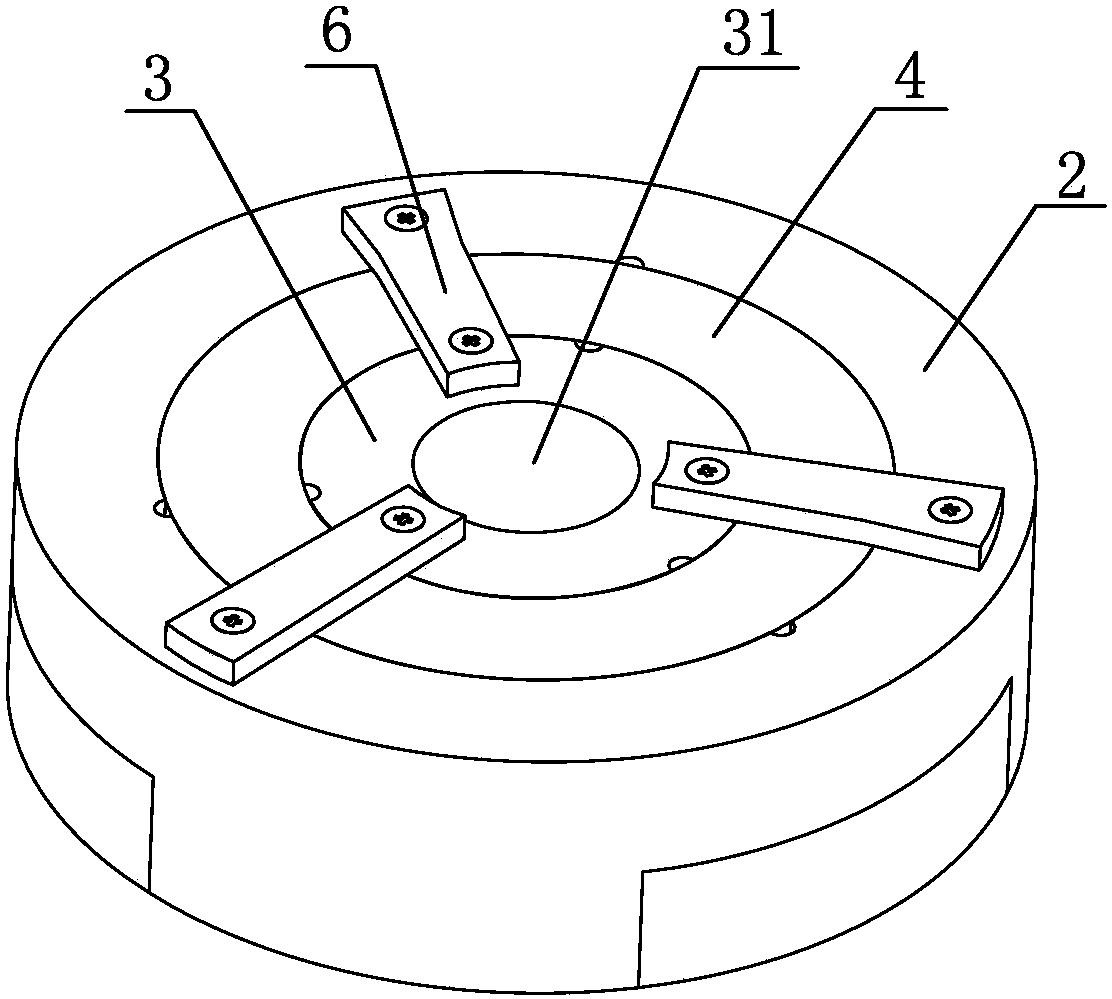
3.根据权利要求1或2所述的一种微小角位移旋转机器人,其特征在于:所述的触手盘包括若干个通过第一直线导轨(12)安装在底盘(11)上的触手(13),且若干个触手(13)处于初始位置时合在一起构成360°,第一压电陶瓷驱动器(14)位于每一个触手(13)和中心轴(15)之间的位置,且所述的第一压电陶瓷驱动器(14)在激励后产生逆压电效应,触发触手(13)沿半径方向向外直线扩张,直至接触摩擦基杆;所述的摩擦基杆包括基座(21),基座(21)上设有第二直线导轨(22),第二直线导轨(22)上设有滑块(23),摩擦杆(25)安装在滑块(23)上,且所述的摩擦杆(25)的两端均安装有第二压电陶瓷驱动器(24),第二压电陶瓷驱动器(24)的一端安装在摩擦杆(25)上,另一端安装在基座挡板(26)上,所述基座挡板(26)设置在所述基座(21)上,且所述基座挡板(26)对称设置在所述第二直线导轨(22)的两侧。
4.根据权利要求3所述的一种微小角位移旋转机器人,其特征在于:当每个摩擦基杆上的两根第二压电陶瓷驱动器(24)受到大小相等方向相反的激励时,第二压电陶瓷驱动器(24)驱动摩擦杆(25)沿第二直线导轨(22)发生位移,触手盘两侧的摩擦杆(25)将与触手盘之间产生平行反向双力。
说明书
技术领域
本发明机器人领域,尤其是涉及一种微小角位移旋转机器人。
背景技术
目前实现微动的驱动方式有磁致伸缩式、电致伸缩式、静电驱动式、电流变驱动式、形状记忆合金、压电驱动式。其中压电驱动是采用压电材料的逆压电效应来实现微动运动。具有驱动力大、定位精度高、响应速度快、不发热无磁场、结构简单等特点,因此应用更为广泛。尺蠖式压电驱动是基于仿生学,模仿生物尺蠖的蠕动姿态,即以触手和基盘二者交替为附着点,身体依次弯曲- 伸直实现前进的运动机理。目前国内外相关机构将“尺蠖效应”运用于微纳米操作领域的研究工作正逐步展开。
国外相关研究机构中,美国Zhang B等研制的行走式尺蠖驱动器中,将压电元件放置在一个整体的柔性结构中,其功能方向刚度为90N/m,工作输出负载为200N,最大静态输出力可以达到lk N,无负载驱动速度达6mm/s;加拿大Suleman A等研制了箝位机构采用桥式柔性铰链放大机构的尺蠖压电驱动器,该驱动器最大输出力为15.1N,最大驱动速度为0.33mm/s;韩国Chanwoo M等研制了箝位机构采用一级杠杆放大机构的尺蠖压电驱动器,驱动器行程为100 mm,最大速度为10mm/s,输出力为10N;加拿大滑铁卢大学Behjat S等研制的尺蠖型驱动器中,中间驱动机构由压电元件和一个液压增压器组成,液压增压器用来增大驱动器的行程;维吉尼亚州立理工大学研制的行走式尺蠖压电驱动器,其中间机构采用了柔性放大机构来放大中间驱动机构的步距,以此来提高驱动器的速度;韩国Jachwan K和Lee J H共同研制了一种新颖的行走式尺蠖压电驱动器,其压电驱动器的中间驱动机构采用了椭圆型机构。
国内相关研究机构中,广东工业大学杨宜民率先研制了行走式尺蠖压电驱动器。杨宜民研制了两种构型的行走式尺蠖压电驱动器,最大行程1000mm,最大输出力3500N;清华大学李勇研制了采用柔性铰链构成的周向式杠杆箝位机构的尺蠖型压电驱动器,行程为60mm,最大输出推力为200N;清华大学董蜀湘等研制了箝位机构采用新功能材料电流变流体的尺蠖型驱动器;武汉理工大学卢全国等研制的行走式尺蠖型驱动器中,两侧的箝位机构采用杠杆放大,行程为1mm,驱动力为14N;吉林大学刘国嵩等研制了整体对称结构的行走式尺蠖驱动器,由主体、压电叠堆和精调斜块组成,最大行程为18mm,驱动速度为0.1mm/s,可牵引150g的载荷;西安交通大学张志军研制的行走式尺蠖驱动器中,两侧的箝位机构采用箝位块来代替紧定螺钉来进行预紧,行程为 8mm,速度为0.8mm/s,输出力为4N;哈尔滨工业大学的张兆成、胡泓等研制了行走式尺蠖驱动器,采用两根平行的导向轴来代替传统的导轨结构,行程为 20mm,最大驱动速度为1.18mm/s。
国内外关于“尺蠖效应”的研究成果多数倾向于解决微小型机器人的直线移动姿态,而关于旋转姿态的研究成果甚少。其难度在于传统机械常用电机+齿轮减速器或带传动机构驱动机械旋转。由于结构局限,角位移很难实现微小步进;再者,空间任意瞬态运动均视为直线、旋转两种基本姿态的合成,仅仅直线运动无法实现机器人复杂的运动姿态。因此将“尺蠖效应”运用于旋转运动,一则可开展微小角位移旋转姿态的研究工作,二则对于完整合成微小型机器人的作业系统有着非常重要的研究意义和必要性。
发明内容
本发明所要解决的技术问题是针对现有技术中存在的问题提供一种微小角位移旋转机器人,其目的是通过对水封槽结构和内部管道进行优化,把内置管道改为外置,能够彻底解决水封槽底部结垢的问题,减少水封槽开裂现象,延长水封槽使用寿命,为干熄焦连续稳定的生产提供保障。
本发明的技术方案是该种微小角位移旋转机器人包括触手盘和摩擦基杆,摩擦基杆有两个,对称的布置在触手盘的两侧;触手盘中设有第一压电陶瓷驱动器,当对触手盘中的第一压电陶瓷驱动器施加激励时,第一压电陶瓷驱动器将产生逆压电效应,使触手盘的半径扩张,并与两侧的摩擦基杆接触;两侧的摩擦基杆通过设置在内部的第二压电陶瓷驱动器驱动平行反向进给,利用静摩擦力产生扭矩,驱动触手盘产生角位移。
所述的旋转机器人的一个完整运动周期是:第一压电陶瓷驱动器受到激励→触手盘半径扩张→触手盘与摩擦基杆接触→第二压电陶瓷驱动器受到激励→触手盘两侧的摩擦基杆平行反向进给产生扭矩→触手盘旋转→第一压电陶瓷驱动器激励消失→触手盘半径恢复→触手盘与两侧摩擦基杆分离→摩擦基杆激励消失→两侧摩擦基杆恢复初始位置。
作为本发明的一种具体实施方式,所述的触手盘包括若干个通过第一直线导轨安装在底盘上的触手,且若干个触手处于初始位置时合在一起构成360°,第一压电陶瓷驱动器位于每一个触手和中心轴之间的位置,且所述的第一压电陶瓷驱动器在激励后产生逆压电效应,触发触手沿半径方向向外直线扩张,直至接触摩擦基杆;所述的摩擦基杆包括基座,基座上设有第二直线导轨,第二直线导轨上设有滑块,摩擦杆安装在滑块上,且所述的摩擦杆的两端均安装有第二压电陶瓷驱动器,第二压电陶瓷驱动器的一端安装在摩擦杆上,另一端安装在基座挡板上,所述基座挡板设置在所述基座上,且所述基座挡板对称设置在所述第二直线导轨的两侧。
等方向相反的激励时,第二压电陶瓷驱动器驱动摩擦杆沿第二直线导轨发生位移,触手盘两侧的摩擦杆将与触手盘之间产生平行反向双力。
具有上述结构的该种微小角位移旋转机器人具有以下优点:
1.该种微小角位移旋转机器人突破MEMS研究领域对于尺蠖效应的常规应用,将尺蠖运动机理变型后,并应用于旋转运动,提升高精度角位移分辨力的运动机理是对传统旋转驱动方式局限的突破。
2.传统旋转驱动方式均以电机+齿轮(或带传动)减速机构驱动旋转中心轴来产生角位移,而此种运动机理无法提高旋转角位移的高精分辨力。本发明基于逆压电效应产生微小线位移的同时,通过静摩擦力作用触手盘圆周对称两侧,以扭矩实现触手盘微小角位移运动,突破了传统驱动方式,并为微小型机器人提升高精度角位移分辨力提供理论基础。
附图说明
下面结合附图对本发明作进一步说明:
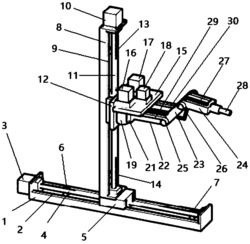
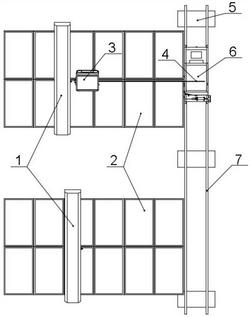
图1为本发明中触手盘的结构示意图。
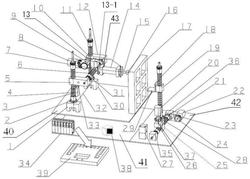
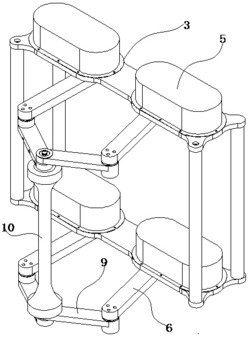
图2为本发明中摩擦基杆的结构示意图。
图3为本发明运动机理建模初始状态示意图。
图4位本发明运动机理建模工作状态示意图。
在图1-4中,11:底盘;12:第一直线导轨;3:触手;4:第一压电陶瓷驱动器;15:中心轴;21:基座;22:第二直线导轨;23:滑块;24:第二压电陶瓷驱动器;25:摩擦杆;26:基座挡板。
具体实施方式
图1为本发明微小角位移旋转机器人中触手盘的结构示意图,图2为本发明摩擦基杆的结构示意图,图3和图4位本发明运动机理建模的初始状态和工作状态的示意图。
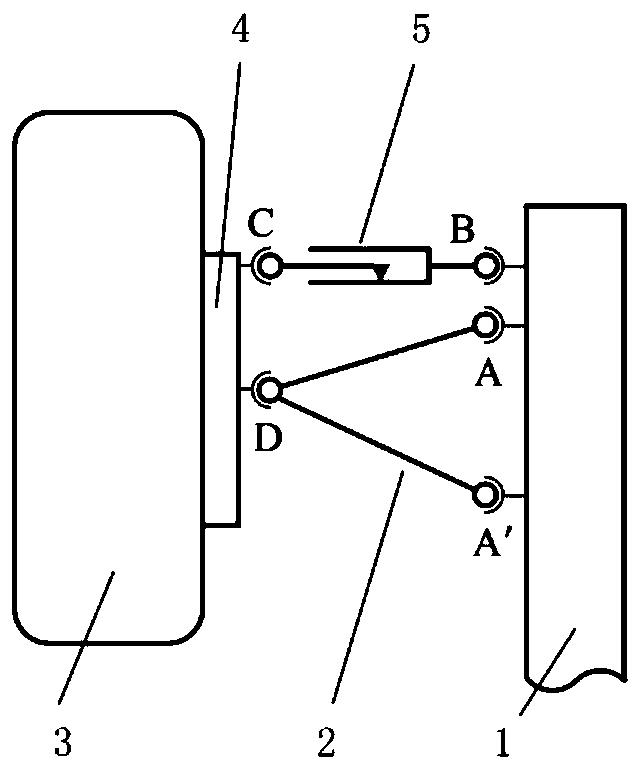
由图3和图4结合可知,变态尺蠖运动机理与理论建模,以分析传统尺蠖运动姿态为研究基础,将直线运动变形为旋转运动,将原始的触手改变为触手盘,将基点改变为摩擦基杆。对触手盘中的第一压电陶瓷施14施加激励,使其产生逆压电效应而半径扩张,并与摩擦杆25接触。两侧摩擦基杆通过第二压电陶瓷驱动器24驱动平行反向进给,利用静摩擦力产生扭矩,驱动触手盘产生角位移。如图4所示,左边的摩擦基杆向上进给,右边的摩擦基杆向下进给,二者运动方向相互平行,且相反,因此可以产生旋转力矩T。
其中,图3为机器人的初始状态。此时触手盘与摩擦基杆的压电陶瓷均未受激励,二者位置保持分离;图4为机器人的工作状态。变态尺蠖运动机理分解如下:第一压电陶瓷驱动器14受到激励→触手盘半径扩张→触手盘与摩擦基杆接触→第二压电陶瓷驱动器24受到激励→触手盘两侧的摩擦基杆平行反向进给产生扭矩→触手盘旋转→第一压电陶瓷驱动器激励消失→触手盘半径恢复→触手盘与两侧摩擦基杆分离→摩擦基杆激励消失→两侧摩擦基杆恢复初始位置。构成一个运动周期。
由图1和图2所示结构可知,该种微小角位移旋转机器人包括触手盘和摩擦基杆,摩擦基杆有两个,对称的布置在触手盘的两侧;触手盘中设有第一压电陶瓷驱动器14,当对触手盘中的第一压电陶瓷驱动器14施加激励时,第一压电陶瓷驱动器14将产生逆压电效应,使触手盘的半径扩张,并与两侧的摩擦基杆接触;两侧的摩擦基杆通过设置在内部的第二压电陶瓷驱动器24驱动平行反向进给,利用静摩擦力产生扭矩,驱动触手盘产生角位移。
触手盘包括四个通过第一直线导轨12安装在底盘11上的触手13,且四个触手13处于初始位置时合在一起构成360°,第一压电陶瓷驱动器14位于每一个触手13和中心轴15之间的位置,且第一压电陶瓷驱动器14在激励后产生逆压电效应,触发触手13沿半径方向向外直线扩张,直至接触摩擦基杆;所述的摩擦基杆包括基座21,基座21上设有第二直线导轨22,第二直线导轨22上设有滑块23,摩擦杆25安装在滑块23上,且所述的摩擦杆 25的两端均安装有第二压电陶瓷驱动器24,第二压电陶瓷驱动器24的一端安装在摩擦杆25上,另一端安装在基座挡板26上,所述基座挡板26设置在所述基座21上,且所述基座挡板26对称设置在所述第二直线导轨22的两侧。
所述的旋转机器人的一个完整运动周期是,第一压电陶瓷驱动器14受到激励→触手盘半径扩张→触手盘与摩擦基杆接触→第二压电陶瓷驱动器24受到激励→触手盘两侧的摩擦基杆平行反向进给产生扭矩→触手盘旋转→第一压电陶瓷驱动器激励消失→触手盘半径恢复→触手盘与两侧摩擦基杆分离→摩擦基杆激励消失→两侧摩擦基杆恢复初始位置。当每个摩擦基杆上的两根第二压电陶瓷驱动器24受到大小相等方向相反的激励时,第二压电陶瓷驱动器24 驱动摩擦杆25沿第二直线导轨22同向发生位移,触手盘两侧的摩擦杆25 将与触手盘之间产生平行反向双力。“双力”是指,触手盘两侧的摩擦杆(25) 将与触手盘之间由于挤压产生正压力作用,在运动时,产生的静摩擦力f左和f 右,f左和f右之间的关系是大小相等、平行反向。
本发明面向MEMS领域微小型机器人运动姿态的研发需求,提出微小角位移旋转机器人,并对其机理和特性作理论分析与实验研究,创新之处为:
1)创新提出“变态尺蠖效应”理论。
突破MEMS研究领域对于尺蠖效应的常规应用,将尺蠖运动机理变型后,并应用于旋转运动,本发明称为“变态尺蠖效应”。
2)提升高精度角位移分辨力的运动机理是对传统旋转驱动方式局限的突破。
传统旋转驱动方式均以电机+齿轮(或带传动)减速机构驱动旋转中心轴来产生角位移,而此种运动机理无法提高旋转角位移的高精分辨力。本发明基于逆压电效应产生微小线位移的同时,通过静摩擦力作用触手盘圆周对称两侧,以扭矩实现触手盘微小角位移运动,突破了传统驱动方式,并为微小型机器人提升高精度角位移分辨力提供理论基础。
一种微小角位移旋转机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0