










专利摘要
本发明提供了一种基于CSI的虚拟现实跟踪方法及系统,该虚拟现实跟踪方法包括如下步骤:数据接收步骤:服务处理终端接收多个数据终端发送的信道状态信息,多个所述数据终端接收穿戴式设备发送的WiFi数据包,并将接收到的WiFi数据包定义为信道状态信息;数据处理步骤:服务处理终端将通过评估所有WiFi数据包传播路径的发射角度和连续包的衰减值来估算包与包之间目标的位移值,从而得到目标的运动轨迹。本发明的有益效果是:本发明只在头戴式设备中嵌入商用WiFi设备,不仅降低复杂度也大大降低了成本,通过利用无处不在的WiFi信号来估计目标的位置信息,实现了高精度、鲁棒性高的VR目标定位跟踪。
权利要求
1.一种基于CSI的虚拟现实跟踪方法,其特征在于,包括如下步骤:
数据接收步骤:服务处理终端接收多个数据终端发送的信道状态信息,多个所述数据终端接收穿戴式设备发送的WiFi数据包,并将接收到的WiFi数据包定义为信道状态信息;
数据处理步骤:服务处理终端将通过评估所有WiFi数据包传播路径的发射角度和连续包的衰减值来估算包与包之间目标的位移值,从而得到目标的运动轨迹。
2.根据权利要求1所述的虚拟现实跟踪方法,其特征在于,所述数据处理步骤包括依次执行如下步骤:
数据预处理步骤:对信道状态信息进行散列点移除、一维线性插值及滤波消噪处理,从而得到净化后的信道状态信息;
路径估计步骤:首先,估计所有路径的发射天线的发射角度,利用MUSIC算法计算发射角度;
移动轨迹估计步骤:估计向量权重,从而计算位移值;
判断步骤:判断是否得到目标移动轨迹,若是,那么输出轨迹,否则返回执行数据预处理步骤。
3.根据权利要求2所述的虚拟现实跟踪方法,其特征在于,
在所述数据预处理步骤中,首先,把落在闭区间[μ-γ*σ,μ+γ*σ]之外的点定义为散列点,其中μ和σ分别为信道状态信息序列的均值和平均绝对差,采用Hampel identifier算法将散列点移除;接着,利用一维线性插值算法来确保连续空间包;最后,对信道状态信息样本进行小波降噪处理,从而得到更加纯净的信道状态信息测量值。
4.根据权利要求2所述的虚拟现实跟踪方法,其特征在于,
在所述路径估计步骤中,MUSIC算法的目标就是从多个导向向量的线性组合中找到所有路径的导向向量,进而找到所有路径的发射角度,信道状态信息表示为:
其中M,A是所有P个数据包的导向向量,W是导向向量的权值,对每个 应用MUSIC算法即可得到所有路径发射角度的精确估计。
5.根据权利要求2所述的虚拟现实跟踪方法,其特征在于,
在所述移动轨迹估计步骤中,首先,估算导向向量线性组合的权重,信道状态信息观测矩阵的每一列都是一个导向向量的线性组合,则权重 进而得到两个连续包的权重:
其中D代表目标的位移信息;接着,利用凸优化问题来求解D,即:
由于相位频偏对所有路径的影响是一样的,于是,使用路径间的相对相位改变来移除偏移的影响;最后,再利用线性最小二乘法求解出位移的估计值。
6.一种基于CSI的虚拟现实跟踪系统,其特征在于,包括:
数据接收模块:用于服务处理终端接收多个数据终端发送的信道状态信息,多个所述数据终端接收穿戴式设备发送的WiFi数据包,并将接收到的WiFi数据包定义为信道状态信息;
数据处理模块:用于服务处理终端将通过评估所有WiFi数据包传播路径的发射角度和连续包的衰减值来估算包与包之间目标的位移值,从而得到目标的运动轨迹。
7.根据权利要求6所述的虚拟现实跟踪系统,其特征在于,所述数据处理模块包括依次运行如下模块:
数据预处理模块:用于对信道状态信息进行散列点移除、一维线性插值及滤波消噪处理,从而得到净化后的信道状态信息;
路径估计模块:用于估计所有路径的发射天线的发射角度,利用MUSIC算法计算发射角度;
移动轨迹估计模块:用于估计向量权重,从而计算位移值;
判断模块:用于判断是否得到目标移动轨迹,若是,那么输出轨迹,否则返回执行数据预处理模块。
8.根据权利要求7所述的虚拟现实跟踪系统,其特征在于,
在所述数据预处理模块中,首先,把落在闭区间[μ-γ*σ,μ+γ*σ]之外的点定义为散列点,其中μ和σ分别为信道状态信息序列的均值和平均绝对差,采用Hampel identifier算法将散列点移除;接着,利用一维线性插值算法来确保连续空间包;最后,对信道状态信息样本进行小波降噪处理,从而得到更加纯净的信道状态信息测量值。
9.根据权利要求7所述的虚拟现实跟踪系统,其特征在于,
在所述路径估计模块中,MUSIC算法的目标就是从多个导向向量的线性组合中找到所有路径的导向向量,进而找到所有路径的发射角度,信道状态信息表示为:
其中M,A是所有P个数据包的导向向量,W是导向向量的权值,对每个 应用MUSIC算法即可得到所有路径发射角度的精确估计。
10.根据权利要求7所述的虚拟现实跟踪系统,其特征在于,
在所述移动轨迹估计模块中,首先,估算导向向量线性组合的权重,信道状态信息观测矩阵的每一列都是一个导向向量的线性组合,则权重 进而得到两个连续包的权重:
其中D代表目标的位移信息;接着,利用凸优化问题来求解D,即:
由于相位频偏对所有路径的影响是一样的,于是,使用路径间的相对相位改变来移除偏移的影响;最后,再利用线性最小二乘法求解出位移的估计值。
说明书
技术领域
本发明涉及无线感知与人机交互技术领域,尤其涉及一种基于CSI的虚拟现实跟踪方法及系统。
背景技术
时至今日,若想亲身体验一次随心所欲的虚拟现实环境仍是一个比较复杂的过程,因为现有的VR体验要么是需要特有的设备,比如利用红外相机跟踪头戴式设备或是手持控制器,要么就是要求在特定的环境中来体验,比如特定区域等,这些限制大大降低了用户体验舒适度。对于一场真正的VR体验来说,在任何时间、任何地点都能做到位置跟踪,及时更新位移。
现有的VR跟踪系统主要分为两大类,一类是由外而内的位置跟踪系统,一类是由内而外的跟踪系统。就由外而内的系统而言,这类系统的跟踪、定位精度已经做的很高了,它们主要运用外设,如红外相机,连到头戴式设备的传感器来实现高精度的定位。但此类系统也有一定的缺陷,例如,无论用户在何地体验VR,他们都需要安装特有的硬件及外设,也就是说,如果一个人想在家里的任何地方体验VR的话,其必须在家中每个地方都要安装红外相机,而且必须距离在红外相机2m内。此外,这类系统还会收到遮挡及光照的影响,如果红外相机被家具遮挡或是光线很暗的情况下,系统就不会工作了。对于由内而外的系统而言,这类系统利用头戴式设备中基于真彩色和深度感知的跟踪算法来实现定位与跟踪,虽然这类系统具有高精度且不需要外设,但却通过增加头戴式设备内的相机数量从而大大增加了复杂度,而且对透明或是纹理较少的物体难以识别。
发明内容
本发明提供了一种基于CSI的虚拟现实跟踪方法,包括如下步骤:
数据接收步骤:服务处理终端接收多个数据终端发送的信道状态信息,多个所述数据终端接收穿戴式设备发送的WiFi数据包,并将接收到的WiFi数据包定义为信道状态信息;
数据处理步骤:服务处理终端将通过评估所有WiFi数据包传播路径的发射角度和连续包的衰减值来估算包与包之间目标的位移值,从而得到目标的运动轨迹。
作为本发明的进一步改进,所述数据处理步骤包括依次执行如下步骤:
数据预处理步骤:对信道状态信息进行散列点移除、一维线性插值及滤波消噪处理,从而得到净化后的信道状态信息;
路径估计步骤:首先,估计所有路径的发射天线的发射角度,利用MUSIC算法计算发射角度;
移动轨迹估计步骤:估计向量权重,从而计算位移值;
判断步骤:判断是否得到目标移动轨迹,若是,那么输出轨迹,否则返回执行数据预处理步骤。
作为本发明的进一步改进,在所述数据预处理步骤中,首先,把落在闭区间[μ-γ*σ,μ+γ*σ]之外的点定义为散列点,其中μ和σ分别为信道状态信息序列的均值和平均绝对差,采用Hampel identifier算法将散列点移除;接着,利用一维线性插值算法来确保连续空间包;最后,对信道状态信息样本进行小波降噪处理,从而得到更加纯净的信道状态信息测量值。
作为本发明的进一步改进,在所述路径估计步骤中,MUSIC算法的目标就是从多个导向向量的线性组合中找到所有路径的导向向量,进而找到所有路径的发射角度,信道状态信息表示为:
其中M,A是所有P个数据包的导向向量,W是导向向量的权值,对每个 应用MUSIC算法即可得到所有路径发射角度的精确估计。
作为本发明的进一步改进,在所述移动轨迹估计步骤中,首先,估算导向向量线性组合的权重,信道状态信息观测矩阵的每一列都是一个导向向量的线性组合,则权重 进而得到两个连续包的权重:
其中D代表目标的位移信息;接着,利用凸优化问题来求解D,即:
由于相位频偏对所有路径的影响是一样的,于是,使用路径间的相对相位改变来移除偏移的影响;最后,再利用线性最小二乘法求解出位移的估计值。
本发明还提供了一种基于CSI的虚拟现实跟踪系统,包括:
数据接收模块:用于服务处理终端接收多个数据终端发送的信道状态信息,多个所述数据终端接收穿戴式设备发送的WiFi数据包,并将接收到的WiFi数据包定义为信道状态信息;
数据处理模块:用于服务处理终端将通过评估所有WiFi数据包传播路径的发射角度和连续包的衰减值来估算包与包之间目标的位移值,从而得到目标的运动轨迹。
作为本发明的进一步改进,所述数据处理模块包括依次运行如下模块:
数据预处理模块:用于对信道状态信息进行散列点移除、一维线性插值及滤波消噪处理,从而得到净化后的信道状态信息;
路径估计模块:用于估计所有路径的发射天线的发射角度,利用MUSIC算法计算发射角度;
移动轨迹估计模块:用于估计向量权重,从而计算位移值;
判断模块:用于判断是否得到目标移动轨迹,若是,那么输出轨迹,否则返回执行数据预处理模块。
作为本发明的进一步改进,在所述数据预处理模块中,首先,把落在闭区间[μ-γ*σ,μ+γ*σ]之外的点定义为散列点,其中μ和σ分别为信道状态信息序列的均值和平均绝对差,采用Hampel identifier算法将散列点移除;接着,利用一维线性插值算法来确保连续空间包;最后,对信道状态信息样本进行小波降噪处理,从而得到更加纯净的信道状态信息测量值。
作为本发明的进一步改进,在所述路径估计模块中,MUSIC算法的目标就是从多个导向向量的线性组合中找到所有路径的导向向量,进而找到所有路径的发射角度,信道状态信息表示为:
其中M,A是所有P个数据包的导向向量,W是导向向量的权值,对每个 应用MUSIC算法即可得到所有路径发射角度的精确估计。
作为本发明的进一步改进,在所述移动轨迹估计模块中,首先,估算导向向量线性组合的权重,信道状态信息观测矩阵的每一列都是一个导向向量的线性组合,则权重 进而得到两个连续包的权重:
其中D代表目标的位移信息;接着,利用凸优化问题来求解D,即:
由于相位频偏对所有路径的影响是一样的,于是,使用路径间的相对相位改变来移除偏移的影响;最后,再利用线性最小二乘法求解出位移的估计值。
本发明的有益效果是:本发明只在头戴式设备中嵌入商用WiFi设备,不仅降低复杂度也大大降低了成本,通过利用无处不在的WiFi信号来估计目标的位置信息,实现了高精度、鲁棒性高的VR目标定位跟踪。
附图说明
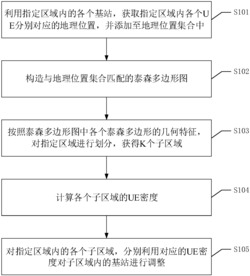
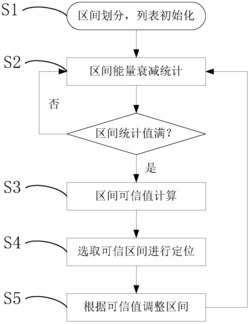
图1是本发明的方法流程图。
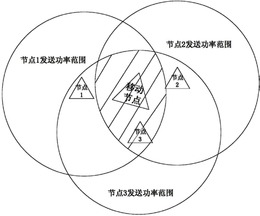
图2是本发明的发射天线阵列图。
具体实施方式
如图1所示,本发明公开了一种基于CSI的虚拟现实跟踪方法,包括如下步骤:
数据接收步骤:服务处理终端接收多个数据终端发送的信道状态信息,多个所述数据终端接收穿戴式设备发送的WiFi数据包,并将接收到的WiFi数据包定义为信道状态信息;
数据处理步骤:服务处理终端将通过评估所有WiFi数据包传播路径的发射角度和连续包的衰减值来估算包与包之间目标的位移值,从而得到目标的运动轨迹。
穿戴式设备可以是头戴式VR眼镜,服务处理终端可以是中心服务器,数据终端:AP,信道状态信息:Channel State Information(CSI)。
使用时,一个嵌入有WiFi芯片的头戴式VR眼镜用来发射WiFi数据包,多个嵌入有Intel 5300网卡的APs用来获取每个数据包的CSI数据,中心服务器连接每个AP,中心服务器用来处理从AP端得到的CSI测量数据以得到目标的位置信息。即,嵌入WiFi芯片的头戴式设备发送标准的WiFi数据包,被所有嵌入Intel5300网卡的APs接收,这些经修改过驱动的Intel5300网卡将接收到的来自不同路径的WiFi数据定义为信道状态信息,即Channel State Information(CSI),利用跟踪算法精确地恢复头戴式设备的位置。
所述数据处理步骤包括依次执行如下步骤:
数据预处理步骤:对信道状态信息进行散列点移除、一维线性插值及滤波消噪处理,从而得到净化后的信道状态信息;
路径估计步骤:首先,估计所有路径的发射天线的发射角度,利用MUSIC算法计算发射角度;
移动轨迹估计步骤:估计向量权重,从而计算位移值;
判断步骤:判断是否得到目标移动轨迹,若是,那么输出轨迹,否则返回在执数行数据预据预处处理步理步骤骤中,。首先,把落在闭区间[μ-γ*σ,μ+γ*σ]之外的点定义为散列点,其中μ和σ分别为CSI序列的均值和平均绝对差,γ通常设为3,采用Hampel identifier算法将散列点移除;接着,由于CSI样本的抖动是不可避免的,以至于会有丢包的产生,为了能够得到时域上连续的包,利用一维线性插值算法来确保连续空间包;最后,由于商业WiFi设备一般暴露在复杂的室内环境中,故难免会产生噪声,仅仅用低通滤波器是不能够消除噪声,本发明中还对CSI样本进行了小波降噪处理,以得到更加纯净CSI测量值。
在所述路径估计步骤中,首先,估计所有路径的发射天线的发射角度Angle of Departure(AoD),利用MUSIC算法计算AoD。MUSIC算法的目标就是从多个导向向量的线性组合中找到所有路径的导向向量,进而找到所有路径的AoD。接着,由于连续两个包之间时间特别短,纳秒级别的,故路径的AoD是相对稳定的且不会变化迅速,鉴于此,CSI可以表示为:
其中M,A是所有P个数据包的导向向量,W是导向向量的权值。对每个 应用MUSIC算法即可得到所有路径AoD的精确估计。
在所述移动轨迹估计步骤中,首先,估算导向向量线性组合的权重,CSI观测矩阵的每一列都是一个导向向量的线性组合,则权重 进而得到两个连续包的权重:
其中D代表目标的位移信息;接着,利用凸优化问题来求解D,即:
由于相位频偏对所有路径的影响是一样的,于是,使用路径间的相对相位改变来移除偏移的影响;最后,再利用线性最小二乘法求解出位移的估计值。
在判断步骤中,不断运用数据预处理步骤、路径估计步骤和移动轨迹估计步骤估计运动目标的位移值以获得目标的运动轨迹,此外,利用Oculus Rift标记的轨迹作为Ground Truth,如果结果基本吻合就返回输出目标的运动轨迹,若不吻合就返回到数据预处理步骤。
定义环境由发射天线到接收天线有L条路径,设置发射端3条天线环阵列中彼此两条天线间的距离为d≈2.6cm,使接收天线AP与传输天线阵列在同一个水平面上,如图2所示。将传输天线的第k个路径的发射角度AoD定义为θk,利用ρk’n代表来自第1条发射天线的第n个子载波在第k个路径上的接收信号。那么来自于传输天线的第k个路径所产生的接收信号向量可表示为 其中:
该向量 被称为导向向量,对于不同的路径会得到不同的导向向量。
在第q个发射天线下,由环境引起的总的衰减和相位偏移被定义为γq’n,由数学定义出发,信道CSI频率响应为:
其中,ω为接收天线相对发射天线的相位值,γq’n是通过累加所有路径上的信号所得,即:
其中,Y中的每个元素代表着γq’n,X中每个元素代表ρk’n,A中每个元素代表不同传输天线在不同路径上的导向向量。
当在两个连续包的空隙中,传输天线移动了距离 时,路径的长度相应地改变了 同时,也会引起相位的变化,即相移 那么,相对于前一个数据包,下一个数据包的信道响应为:
Y2=ADX
其中,D为一个对角矩阵,其值为
在传输天线和接收天线之间存在一定的时延,这会导致一定的频偏,这必将也会引起相位的偏移,此外,该偏移随时间变化并不是一个常量。对于第p个包而言,可定义频率响应为:
于是,当在发连续包的过程中,发射天线移动位移 时,测得的两个包的CSI就被定义为:
本发明还公开了一种基于CSI的虚拟现实跟踪系统,包括:
数据接收模块:用于服务处理终端接收多个数据终端发送的信道状态信息,多个所述数据终端接收穿戴式设备发送的WiFi数据包,并将接收到的WiFi数据包定义为信道状态信息;
数据处理模块:用于服务处理终端将通过评估所有WiFi数据包传播路径的发射角度和连续包的衰减值来估算包与包之间目标的位移值,从而得到目标的运动轨迹。
所述数据处理模块包括依次运行如下模块:
数据预处理模块:用于对信道状态信息进行散列点移除、一维线性插值及滤波消噪处理,从而得到净化后的信道状态信息;
路径估计模块:用于估计所有路径的发射天线的发射角度,利用MUSIC算法计算发射角度;
移动轨迹估计模块:用于估计向量权重,从而计算位移值;
判断模块:用于判断是否得到目标移动轨迹,若是,那么输出轨迹,否则返回执行数据预处理模块。
在所述数据预处理模块中,首先,把落在闭区间[μ-γ*σ,μ+γ*σ]之外的点定义为散列点,其中μ和σ分别为信道状态信息序列的均值和平均绝对差,采用Hampel identifier算法将散列点移除;接着,利用一维线性插值算法来确保连续空间包;最后,对信道状态信息样本进行小波降噪处理,从而得到更加纯净的信道状态信息测量值。
在所述路径估计模块中,MUSIC算法的目标就是从多个导向向量的线性组合中找到所有路径的导向向量,进而找到所有路径的发射角度,信道状态信息表示为:
其中M,A是所有P个数据包的导向向量,W是导向向量的权值,对每个 应用MUSIC算法即可得到所有路径发射角度的精确估计。
在所述移动轨迹估计模块中,首先,估算导向向量线性组合的权重,信道状态信息观测矩阵的每一列都是一个导向向量的线性组合,则权重 进而得到两个连续包的权重:
其中D代表目标的位移信息;接着,利用凸优化问题来求解D,即:
由于相位频偏对所有路径的影响是一样的,于是,使用路径间的相对相位改变来移除偏移的影响;最后,再利用线性最小二乘法求解出位移的估计值。
本发明利用现在无处不在的WiFi,提出一个基于WiFi的位置跟踪定位系统。
本发明将头戴式VR设备嵌入一个WiFi芯片作为发射无线信号的天线,将多个嵌入Intel5300网卡的APs作为接收CSI信号的设备,通过挖掘这些CSI信号来精确恢复头戴式设备的位置轨迹。主要通过评估所有WiFi信号传播路径的发射角度AoD(angle of departure)和连续包的衰减值来估算包与包之间目标的位移值,以得到目标的运动轨迹。在不基于监督学习的情况下,该系统能够取得高精度、高鲁棒性的结果,在VR感知、人机交互及其游戏等方面有很高的学术和应用价值。
与现有技术相比,本发明的有益效果是摒弃过多外设,只在头戴式设备中嵌入商用WiFi设备,不仅降低复杂度也大大降低了成本,通过利用无处不在的WiFi信号来估计目标的位置信息,实现了高精度、鲁棒性高的VR目标定位跟踪。
本发明并不局限于头戴式设备里面嵌入wifi,其他的类似设备和方法也在保护范围之内。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
一种基于CSI的虚拟现实跟踪方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0