








专利摘要
本发明提供一种基于智能手表的2D移动轨迹识别方法和装置。该方法包括:获取智能手表的加速计信号数据以及陀螺仪信号数据;利用所述加速度信号数据估计智能手表的倾斜角并利用该倾斜角对所述陀螺仪信号数据进行校正;利用校正后的陀螺仪信号数据计算智能手表的角度值信息并估计坐标点。本发明利用内置于智能手表的加速计和陀螺仪,能够进行精确地估计智能手表的运动轨迹。
权利要求
1.一种基于智能手表的2D移动轨迹识别方法,包括以下步骤:
获取智能手表的加速度计信号数据以及陀螺仪信号数据;
利用所述加速度计信号数据估计智能手表的倾斜角并利用该倾斜角对所述陀螺仪信号数据进行校正;
利用校正后的陀螺仪信号数据计算智能手表的角度值信息并估计坐标点;
其中,利用所述加速度计信号数据估计智能手表的倾斜角并利用该倾斜角对所述陀螺仪信号数据进行校正包括以下子步骤:
将加速度计信号数据的X、Y、Z轴数据分别记为ax、ay、az,将陀螺仪信号数据的X、Y、Z轴数据分别记为gx、gy、gz;
计算加速度计信号数据的能量值大小e=ax
判断加速度计信号数据的能量值大小e是否小于等于能量阈值,若是,则更新能量计数信息c=c+1,并判断能量计数c是否大于等于能量计数阈值Cthreshold,若是,则更新倾斜角度信息,表示为
利用更新的倾斜角度信息,对陀螺仪y轴和z轴角速度信号数据进行校正,表示为
2.根据权利要求1所述的基于智能手表的2D移动轨迹识别方法,其特征在于,所述能量计数阈值大小设置为cthreshold=f×0.1,所述能量阈值大小设置为ethreshold=0.04,其中f是数据的采样频率。
3.根据权利要求1所述的基于智能手表的2D移动轨迹识别方法,其特征在于,利用校正后的陀螺仪信号数据计算智能手表的角度值信息并估计坐标点包括以下子步骤:
设置陀螺仪信号数据两次采样时间间隔长度
对校正后的陀螺仪角速度信号数据在时间上积分,表示为θx=∫gxdt、
将二维垂直坐标系下的基向量设置为单位向量
4.根据权利要求1所述的基于智能手表的2D移动轨迹识别方法,其特征在于,还包括:当获得估计的坐标点后,将坐标点广播给维护的客户端列表。
5.根据权利要求1所述的基于智能手表的2D移动轨迹识别方法,其特征在于,对于所获取的智能手表的加速度计信号数据以及陀螺仪信号数据使用巴特沃滋滤波进行处理。
6.一种基于智能手表的2D移动轨迹识别系统,其特征在于,所述2D移动轨迹识别系统包括:
用于获取智能手表的加速度计信号数据以及陀螺仪信号数据的模块;
用于利用所述加速度计信号数据估计智能手表的倾斜角并利用该倾斜角对所述陀螺仪信号数据进行校正的模块;
用于利用校正后的陀螺仪信号数据计算智能手表的角度值信息并估计坐标点的模块;
其中,利用所述加速度计信号数据估计智能手表的倾斜角并利用该倾斜角对所述陀螺仪信号数据进行校正包括以下子步骤:
将加速度计信号数据的X、Y、Z轴数据分别记为ax、ay、az,将陀螺仪信号数据的X、Y、Z轴数据分别记为gx、gy、gz;
计算加速度计信号数据的能量值大小e=ax
判断加速度计信号数据的能量值大小e是否小于等于能量阈值,若是,则更新能量计数信息c=c+1,并判断能量计数c是否大于等于能量计数阈值cthreshold,若是,则更新倾斜角度信息,表示为
利用更新的倾斜角度信息,对陀螺仪y轴和z轴角速度信号数据进行校正,表示为
7.根据权利要求6所述的基于智能手表的2D移动轨迹识别系统,其特征在于,还包括:
监听协议单元:用于监听连接至所述系统的请求,并维护处于连接状态的客户端列表;
广播传输单元:用于将坐标点广播给所维护的客户端列表。
8.一种计算机可读存储介质,其上存储有计算机程序,其中,该程序被处理器执行时实现根据权利要求1至5中任一项所述方法的步骤。
9.一种计算机设备,包括存储器和处理器,在所述存储器上存储有能够在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现权利要求1至5中任一项所述的方法的步骤。
说明书
技术领域
本发明涉及智能设备交互技术领域,尤其涉及一种基于智能手表的2D移动轨迹识别方法和系统。
背景技术
目前,随着虚拟现实(VR)、人工智能技术逐渐受到追捧,智能手表、手环逐渐成为可穿戴领域的主流,但对于使用智能手表、手环的用户来说,智能手表的屏幕尺寸大小使得操作极其不便。与此同时,随着5G时代的来临,智能家居领域的市场前景更加广阔,目前控制智能家居的主要手段是通过手机进行控制,但用户在家中并不是随身携带手机的,用户和智能家居之间的交互体验不佳和操作复杂等问题也成为了热点问题。
因此,需要对现有技术改进,以进一步拓展智能手表的功能。
发明内容
本发明的目的在于克服上述现有技术的缺陷,提供一种基于智能手表的2D移动轨迹识别方法和系统,能够实现智能手表佩戴者的手势轨迹跟踪。
根据本发明的第一方面,提供一种基于智能手表的2D移动轨迹识别方法。该方法包括以下步骤:
获取智能手表的加速计信号数据以及陀螺仪信号数据;
利用所述加速度信号数据估计智能手表的倾斜角并利用该倾斜角对所述陀螺仪信号数据进行校正;
利用校正后的陀螺仪信号数据计算智能手表的角度值信息并估计坐标点。
在一个实施例中,利用所述加速度信号数据估计智能手表的倾斜角并利用该倾斜角对所述陀螺仪信号数据进行校正包括以下子步骤:
将加速度计信号数据的X、Y、Z轴数据分别记为ax、ay、az,将陀螺仪信号数据的X、Y、Z轴数据分别记为gx、gy、gz;
计算加速度计信号数据的能量值大小e=ax2+ay2+az2,初始化能量计数c=0,并设置能量阈值大小ethreshold以及能量计数阈值大小cthreshold;
判断加速度计信号数据的能量值大小e是否小于等于能量阈值,若是,则更新能量计数信息c=c+1,并判断能量计数c是否大于等于能量计数阈值cthreshold,若是,则更新倾斜角度信息,表示为
利用更新的倾斜角度信息,对陀螺仪y轴和z轴角速度信号数据进行矫正,表示为 其中, 为矫正后的陀螺仪y轴数据, 为矫正后的陀螺仪z轴数据。
在一个实施例中,所述能量计数阈值大小设置为cthreshold=f×0.1,所述能量阈值大小设置为ethreshold=0.04,其中f是数据的采样频率。
在一个实施例中,利用校正后的陀螺仪信号数据计算智能手表的角度值信息并估计坐标点包括以下子步骤:
设置陀螺仪信号数据两次采样时间间隔长度
对矫正后的陀螺仪角速度信号数据在时间上积分,表示为θx=∫gxdt、 其中,θx为翻滚角,θy为俯仰角,θz为偏航角;
将二维垂直坐标系下的基向量设置为单位向量 则当前坐标点为
在一个实施例中,本发明的方法还包括:当获得估计的坐标点后,将坐标点广播给维护的客户端列表。
在一个实施例中,对于所获取的智能手表的加速计信号数据以及陀螺仪信号数据使用巴特沃滋滤波进行处理。
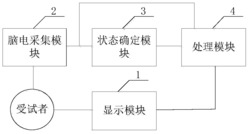
根据本发明的第二方面,提供一种基于智能手表的2D移动轨迹识别系统。该系统包括:用于获取智能手表的加速计信号数据以及陀螺仪信号数据的模块;用于利用所述加速度信号数据估计智能手表的倾斜角并利用该倾斜角对所述陀螺仪信号数据进行校正的模块;用于利用校正后的陀螺仪信号数据计算智能手表的角度值信息并估计坐标点的模块。
与现有技术相比,本发明的优点在于:能够在不改变智能手表的软/硬件的情况下拓展智能手表的功能,实现连续手势的轨迹跟踪记录。同时,通过与智能家居、电脑以及无人机等的配合,实现利用轨迹跟踪手势来对目标设备进行连续移动平滑操控,丰富了智能手表的应用场景。
附图说明
以下附图仅对本发明作示意性的说明和解释,并不用于限定本发明的范围,其中:
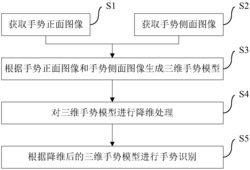
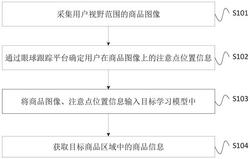
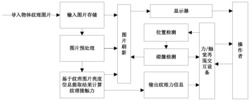
图1是根据本发明一个实施例的基于智能手表的2D移动轨迹识别方法的流程图;
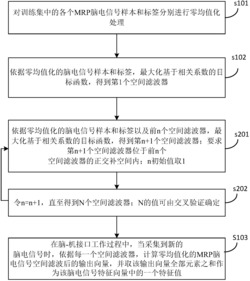
图2是根据本发明一个实施例的陀螺仪坐标矫正流程图;
图3是根据本发明一个实施例的欧拉角的示意图。
具体实施方式
为了使本发明的目的、技术方案、设计方法及优点更加清楚明了,以下结合附图通过具体实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
在本文示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
参见图1所示,本发明实施例提供的基于智能手表的2D移动轨迹识别方法包括以下步骤:
步骤S1,采集智能手表的加速度计及陀螺仪传感器信号。
例如,利用智能手表上内置的加速度计和陀螺仪进行信号采集,获得智能手表的加速信号数据和陀螺仪信号数据。进一步地,为了消除噪声或异常数据,可对采集的信号滤波,例如使用巴特沃滋滤波处理采集的数据。
加速度计可以感知任意方向上的加速度,通过测量智能手表在某个轴向的受力情况来表征轴向的加速度大小和方向。陀螺仪通过测量三维坐标系内陀螺转子的垂直轴与智能手表之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态。以三轴加速度计和三轴陀螺仪为例,可获得加速度计和陀螺仪的x、y、z三轴的信号数据,由于智能手表与用户的手部紧贴,这些数据能够反映用户的手势运动情况。
步骤S2,利用加速度计信号数据估计倾斜角并校正陀螺仪的信号数据。
在此步骤中,利用加速度计信号数据对智能手表的倾斜角进行估计,并对陀螺仪信号数据进行矫正。
具体地,参见图2所示,利用加速度计数据对陀螺仪数据进行矫正包括以下步骤:
初始化倾斜角θ为0,此时cosθ、sinθ分别为1、0;
采集并使用巴特沃滋滤波后的加速度计X、Y、Z轴数据,记为ax、ay、az,采集并使用巴特沃滋滤波后的陀螺仪X、Y、Z轴数据,记为gx、gy、gz,智能手表设备的传感器采样频率记为f(单位Hz);
计算加速度计数据的能量值大小e=ax2+ay2+az2,初始化能量计数c=0,并设置能量阈值大小ethreshold=0.04以及能量计数阈值大小cthreshold=f×0.1,利用加速度计信号数据估计倾斜角θ。
判断能量值大小e是否小于等于能量阈值,若是,则更新能量计数信息:c=c+1;
判断能量计数c是否大于等于能量计数阈值cthreshold,若是,则更新倾斜角度θ信息: 若否,则进入下一步;
利用倾斜角度θ信息,对陀螺仪y轴和z轴角速度信号数据进行矫正,表示为 其中, 为矫正后的陀螺仪y轴数据, 为矫正后的陀螺仪z轴数据。
应理解的是,本发明实施例的能量阈值和计数阈值可根据应用场景等设置为合适的值,本发明对此不进行限制。
步骤S3,利用矫正后的陀螺仪信号数据计算智能手表当前状态下的角度值。
在此步骤中,利用矫正后的陀螺仪信号数据计算智能手表当前状态下的角度值信息(欧拉角),并进而估算当前坐标点(x,y),其中角度值信息参见图3所示,包括俯仰角、偏航角、翻滚角。
具体步骤包括:设置陀螺仪数据两次采样时间间隔长度 对矫正后的陀螺仪角速度信号数据在时间上积分,表示为θx=∫gxdt、 其中,θx为翻滚角,θy为俯仰角,θz为偏航角;基向量定义及坐标点估算,例如,将二维垂直坐标系下的基向量设置为单位向量 估算当前坐标点,表示为
步骤S4,将结果发送给连接的客户端。
例如,利用蓝牙、Wi-Fi等协议将坐标点发送到连接本系统的客户端。具体步骤包括:在系统启动后开始监听使用蓝牙、Wi-Fi等协议连接本系统的请求,并维护处于连接状态的客户端列表;当2D移动轨迹识别系统检测到手势信号后,将坐标点广播给所维护的客户端列表。
相应地,本发明还提供一种基于智能手表的2D移动轨迹识别系统,用于实现上述方法的一个方面或多个方面。
例如,该系统包括:信号采集模块,其用于采集智能手表上的加速度计以及陀螺仪传感器的信号数据并使用巴特沃滋滤波处理采集的数据;信号矫正模块,其用于利用加速度计信号数据对智能手表的倾斜角进行估计,并对陀螺仪信号数据进行矫正;计算检测模块,其用于利用矫正后的陀螺仪信号数据计算智能手表当前状态下的角度值(俯仰角、偏航角、翻滚角)并估算当前坐标点(x,y);数据传输模块,其用于利用蓝牙、Wi-Fi等协议将坐标点发送到连接本系统的客户端。
进一步地,所述信号矫正模块还包括:
数据采集记录单元,用于采集并使用巴特沃滋滤波后的加速度计X、Y、Z轴数据记为ax、ay、az,采集并使用巴特沃滋滤波后的陀螺仪X、Y、Z轴数据记为gx、gy、gz;智能手表设备的传感器采样频率记为f;初始化倾斜角θ为0,此时cosθ、sinθ分别为1、0;
计算设置参数单元,用于计算加速度计数据的能量值大小e=ax2+ay2+az2,初始化能量计数c=0,并设置能量阈值大小ethreshold=0.04以及能量计数阈值大小cthreshold=f×0.1;
判断单元,用于判断能量值大小e是否小于等于能量阈值,若是,则更新能量计数信息:c=c+1,并判断能量计数c是否大于等于能量计数阈值cthreshold,若是,则更新倾斜角度θ信息: 若否,则进入修正角速度单元;
修正角速度单元:用于利用倾斜角度θ信息,对陀螺仪y轴和z轴角速度信号数据进行矫正: gz×cosθ,其中, 为修正后的陀螺仪y轴数据, 为矫正后的陀螺仪z轴数据。
进一步地,所述计算检测模块中还包括:
角速度积分单元:用于设置陀螺仪数据两次采样时间间隔长度 对矫正后的陀螺仪角速度信号数据在时间上积分:θx=∫gxdt、 其中,θx为翻滚角,θy为俯仰角,θz为偏航角;
坐标点计算单元:用于将二维垂直坐标系下的基向量设置为单位向量 则当前坐标点为
进一步地,所述数据传输模块中还包括:
监听协议单元:用于在系统启动后开始监听使用蓝牙、Wi-Fi等协议连接本系统的请求,并维护处于连接状态的客户端列表;
广播传输单元;用于当2D移动轨迹识别系统检测到手势信号后,将坐标点广播给所维护的客户端列表。
综上所述,本发明通过组合利用内置于智能手表的加速度计和陀螺仪能够绘制出手表的运动轨迹的位移图,并进而实现利用轨迹跟踪手势来对目标设备进行操控。
需要说明的是,虽然上文按照特定顺序描述了各个步骤,但是并不意味着必须按照上述特定顺序来执行各个步骤,实际上,这些步骤中的一些可以并发执行,甚至改变顺序,只要能够实现所需要的功能即可。
本发明可以是系统、方法和/或计算机程序产品。计算机程序产品可以包括计算机可读存储介质,其上载有用于使处理器实现本发明的各个方面的计算机可读程序指令。
计算机可读存储介质可以是保持和存储由指令执行设备使用的指令的有形设备。计算机可读存储介质例如可以包括但不限于电存储设备、磁存储设备、光存储设备、电磁存储设备、半导体存储设备或者上述的任意合适的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:便携式计算机盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(EPROM或闪存)、静态随机存取存储器(SRAM)、便携式压缩盘只读存储器(CD-ROM)、数字多功能盘(DVD)、记忆棒、软盘、机械编码设备、例如其上存储有指令的打孔卡或凹槽内凸起结构、以及上述的任意合适的组合。
以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
一种基于智能手表的2D移动轨迹识别方法和系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0