







专利摘要
本发明提供了一种基于骨传导振动信号传播的智能输入方法及系统,该智能输入方法包括:S1.接收步骤,智能设备用振动传感器接收振动信号,并对振动信号进行降噪处理;S2.提取步骤,利用双门限端点检测法检测并提取由于敲击人体指定部位产生的振动信号片段;S3.处理步骤,提取信号特征,基于RNM算法来分类信号位置。本发明的有益效果是:本发明不仅解决智能手表文本输入方式的问题,还能达到高识别率,并且可以快速进行输入,也不损耗智能手表的续航时间。
权利要求
1.一种基于骨传导振动信号传播的智能输入方法,其特征在于,包括如下步骤:
S1.接收步骤,智能设备用振动传感器接收振动信号,并对振动信号进行降噪处理;
S2.提取步骤,利用双门限端点检测法检测并提取由于敲击人体指定部位产生的振动信号片段;
S3.处理步骤,提取信号特征,基于RNM算法来分类信号位置。
2.根据权利要求1所述的智能输入方法,其特征在于,在所述S2.提取步骤中包括:
步骤S21,对处理的信号设置高、低两个门限;
步骤S22,当信号的能量或过零率超越低门限,初步确定敲击信号起点,而当信号的能量或过零率突破高门限,才确定敲击信号真正的起点;当信号能量和过零率同时低于低门限时,确定信号终点;
步骤S23,保留起点至终点的数据,得到由敲击手背产生的振动信号片段。
3.根据权利要求1所述的智能输入方法,其特征在于,所述S3.处理步骤中包括:
步骤S31,对振动信号片段中的切段信号进行归一化,提取梅尔频率倒频谱系数,得到信号特征;
步骤S32,对信号特征使用基于随机子空间和最近中心点算法的RNM算法进行分类,进而判断出敲击位置;
所述步骤S32包括:
步骤S321,根据敲击位置的不同,采集步骤S31得到的信号特征作训练样本,并进行分类;
步骤S322,使用最近中心点算法计算训练样本的每一类中心点;
步骤S323,基于随机子空间,测试样本与训练样本的类中心点多次在子空间对比,得到多个分类结果;
步骤S324,对分类结果使用简单多数投票原则,并且设置一定票数比例,获得多数票同时达到一定的票数的情况下得到最终分类结果;
步骤S325,将分类成功的样本归入新的训练样本,重新计算新训练样本的新类中心点。
4.根据权利要求3所述的智能输入方法,其特征在于:
在所述步骤S321中,对手背不同位置敲击,采集得到步骤S31的信号特征作为训练样本,标记位置并根据位置的不同分成n类,每类敲击m次,其中n与m大于或等于1;
在所述步骤S323中,将步骤S322中每一次产生的类中心分别随机抽样T个属性,重复S322、S323步骤操作Q次,得到Q个子空间,在子空间里逐一对比测试样本与训练样本的各个类中心点的欧式距离,找到最近中心点,即得到Q个子空间分类的结果,其中T、Q大于1。
5.根据权利要求1所述的智能输入方法,其特征在于:
在所述S2.提取步骤中,人体指定部位为手背;
振动传感器为压电陶瓷振动传感器;
所述S1.接收步骤中,对振动信号进行降噪处理包括:
步骤S11,使用20Hz的巴特沃斯高通滤波器滤掉直流分量和低频噪声;
步骤S12,使用800Hz低通滤波滤掉高频噪声。
6.一种基于骨传导振动信号传播的智能输入系统,其特征在于,包括:
接收模块,智能设备用振动传感器接收振动信号,并对振动信号进行降噪处理;
提取模块,利用双门限端点检测法检测并提取由于敲击人体指定部位产生的振动信号片段;
处理模块,提取信号特征,基于RNM算法来分类信号位置。
7.根据权利要求6所述的智能输入系统,其特征在于,在所述提取模块中包括:
第一提取模块,用于对处理的信号设置高、低两个门限;
第二提取模块,用于当信号的能量或过零率超越低门限,初步确定敲击信号起点,而当信号的能量或过零率突破高门限,才确定敲击信号真正的起点;当信号能量和过零率同时低于低门限时,确定信号终点;
第三提取模块,用于保留起点至终点的数据,得到由敲击手背产生的振动信号片段。
8.根据权利要求6所述的智能输入系统,其特征在于,所述处理模块中包括:
第一处理模块,用于对振动信号片段中的切段信号进行归一化,提取梅尔频率倒频谱系数,得到信号特征;
第二处理模块,用于对信号特征使用基于随机子空间和最近中心点算法的RNM算法进行分类,进而判断出敲击位置;
所述第二处理模块包括:
第一处理单元,用于根据敲击位置的不同,采集第一处理模块得到的信号特征作训练样本,并进行分类;
第二处理单元,用于使用最近中心点算法计算训练样本的每一类中心点;
第三处理单元,用于基于随机子空间,测试样本与训练样本的类中心点多次在子空间对比,得到多个分类结果;
第四处理单元,用于对分类结果使用简单多数投票原则,并且设置一定票数比例,获得多数票同时达到一定的票数的情况下得到最终分类结果;
第五处理单元,用于将分类成功的样本归入新的训练样本,重新计算新训练样本的新类中心点。
9.根据权利要求8所述的智能输入系统,其特征在于:
在所述第一处理单元中,对手背不同位置敲击,采集得到第一处理模块的信号特征作为训练样本,标记位置并根据位置的不同分成n类,每类敲击m次,其中n与m大于或等于1;
在所述第三处理单元中,将第二处理单元中每一次产生的类中心分别随机抽样T个属性,重复第二处理单元、第三处理单元操作Q次,得到Q个子空间,在子空间里逐一对比测试样本与训练样本的各个类中心点的欧式距离,找到最近中心点,即得到Q个子空间分类的结果,其中T、Q大于1。
10.根据权利要求6所述的智能输入系统,其特征在于:
在所述提取模块中,人体指定部位为手背;
振动传感器为压电陶瓷振动传感器;
所述接收模块中,对振动信号进行降噪处理包括:
第一接收模块,用于使用20Hz的巴特沃斯高通滤波器滤掉直流分量和低频噪声;
第二接收模块,用于使用800Hz低通滤波滤掉高频噪声。
说明书
技术领域
本发明涉及智能可穿戴设备技术领域,尤其涉及基于骨传导振动信号传播的智能输入方法及系统。
背景技术
近几年来,我们见证着智能可穿戴设备的快速发展,智能手环、智能耳机、智能眼镜、智能头盔和智能手表等可穿戴设备在人们日常生活中日益流行,为人们所接受。在智能手机的创新空间不断缩小以及市场增量接近饱和的情况下,智能可穿戴设备作为移动终端产业的下一个热点已被市场广泛认同,被预言为即将取代手机的发明。
智能手表作为一种便携式设备而流行。但是,它的小巧和轻便也面临不可规避的技术问题。由于屏幕较小,每次只能显示若干个键,并且会挡住其他内容的显示,效率很低。目前智能手表实现文本输入的方式主要有三种:传统键盘、文本预测和语音识别。但以上方式要么不够方便灵活,要么不够安全。在有环境噪声情况下语音识别率很难达到理想效果,并且对于保护用户密码及其他隐私方面,在公共场合使用语音输入是明显不适合的。尽管多国科研团队开发出手指跟踪识别技术,但用户对于键盘使用的体验始终无法与大屏幕智能手机有效快捷舒适的文本输入对比,比如2016年美国华盛顿大学的科研团队实现了毫米级的精准手指跟踪技术,让用户在移动设备上实现基于声波定位的手写输入,但手写输入始终还是太慢,不能满足人们的需求。想要扩大智能手表的市场需求,就必须深度挖掘其应用并解决文本输入问题。
发明内容
本发明提供了一种基于骨传导振动信号传播的智能输入方法,包括如下步骤:
S1.接收步骤,智能设备用振动传感器接收振动信号,并对振动信号进行降噪处理;
S2.提取步骤,利用双门限端点检测法检测并提取由于敲击人体指定部位产生的振动信号片段;
S3.处理步骤,提取信号特征,基于RNM算法来分类信号位置。
作为本发明的进一步改进,在所述S2.提取步骤中包括:
步骤S21,对处理的信号设置高、低两个门限;
步骤S22,当信号的能量或过零率超越低门限,初步确定敲击信号起点,而当信号的能量或过零率突破高门限,才确定敲击信号真正的起点;当信号能量和过零率同时低于低门限时,确定信号终点;
步骤S23,保留起点至终点的数据,得到由敲击手背产生的振动信号片段。
作为本发明的进一步改进,所述S3.处理步骤中包括:
步骤S31,对切段信号进行归一化,提取梅尔频率倒频谱系数,得到信号特征;
步骤S32,对信号特征使用基于随机子空间和最近中心点算法的RNM算法进行分类,进而判断出敲击位置;
所述步骤S32包括:
步骤S321,根据敲击位置的不同,采集步骤S31得到的信号特征作训练样本,并进行分类;
步骤S322,使用最近中心点算法计算训练样本的每一类中心点;
步骤S323,基于随机子空间,测试样本与训练样本的类中心点多次在子空间对比,得到多个分类结果;
步骤S324,对分类结果使用简单多数投票原则,并且设置一定票数比例,获得多数票同时达到一定的票数的情况下得到最终分类结果;
步骤S325,将分类成功的样本归入新的训练样本,重新计算新训练样本的新类中心点。
作为本发明的进一步改进,在所述步骤S321中,对手背不同位置敲击,采集得到步骤S31的信号特征作为训练样本,标记位置并根据位置的不同分成n类,每类敲击m次,其中n与m大于或等于1;
在所述步骤S323中,将步骤S322中每一次产生的类中心分别随机抽样T个属性,重复以上操作Q次,得到Q个子空间,在子空间里逐一对比测试样本与训练样本的各个类中心点的欧式距离,找到最近中心点,即得到Q个子空间分类的结果,其中T、Q大于1。
作为本发明的进一步改进,在所述S2.提取步骤中,人体指定部位为手背;
振动传感器为压电陶瓷振动传感器;
所述S1.接收步骤中,对振动信号进行降噪处理包括:
步骤S11,使用20Hz的巴特沃斯高通滤波器滤掉直流分量和低频噪声;
步骤S12,使用800Hz低通滤波滤掉高频噪声。
本发明还提供了一种基于骨传导振动信号传播的智能输入系统,包括:
接收模块,智能设备用振动传感器接收振动信号,并对振动信号进行降噪处理;
提取模块,利用双门限端点检测法检测并提取由于敲击人体指定部位产生的振动信号片段;
处理模块,提取信号特征,基于RNM算法来分类信号位置。
作为本发明的进一步改进,在所述提取模块中包括:
第一提取模块,用于对处理的信号设置高、低两个门限;
第二提取模块,用于当信号的能量或过零率超越低门限,初步确定敲击信号起点,而当信号的能量或过零率突破高门限,才确定敲击信号真正的起点;当信号能量和过零率同时低于低门限时,确定信号终点;
第三提取模块,用于保留起点至终点的数据,得到由敲击手背产生的振动信号片段。
作为本发明的进一步改进,所述处理模块中包括:
第一处理模块,用于对切段信号进行归一化,提取梅尔频率倒频谱系数,得到信号特征;
第二处理模块,用于对信号特征使用基于随机子空间和最近中心点算法的RNM算法进行分类,进而判断出敲击位置;
所述第二处理模块包括:
第一处理单元,用于根据敲击位置的不同,采集步骤S31得到的信号特征作训练样本,并进行分类;
第二处理单元,用于使用最近中心点算法计算训练样本的每一类中心点;
第三处理单元,用于基于随机子空间,测试样本与训练样本的类中心点多次在子空间对比,得到多个分类结果;
第四处理单元,用于对分类结果使用简单多数投票原则,并且设置一定票数比例,获得多数票同时达到一定的票数的情况下得到最终分类结果;
第五处理单元,用于将分类成功的样本归入新的训练样本,重新计算新训练样本的新类中心点。
作为本发明的进一步改进,在所述第一处理单元中,对手背不同位置敲击,采集得到步骤S31的信号特征作为训练样本,标记位置并根据位置的不同分成n类,每类敲击m次,其中n与m大于或等于1;
在所述第三处理单元中,将第二处理单元中每一次产生的类中心分别随机抽样T个属性,重复以上操作Q次,得到Q个子空间,在子空间里逐一对比测试样本与训练样本的各个类中心点的欧式距离,找到最近中心点,即得到Q个子空间分类的结果,其中T、Q大于1。
作为本发明的进一步改进,
在所述提取模块中,人体指定部位为手背;
振动传感器为压电陶瓷振动传感器;
所述接收模块中,对振动信号进行降噪处理包括:
第一接收模块,用于使用20Hz的巴特沃斯高通滤波器滤掉直流分量和低频噪声;
第二接收模块,用于使用800Hz低通滤波滤掉高频噪声。
本发明的有益效果是:本发明不仅解决智能手表文本输入方式的问题,还能达到高识别率,并且可以快速进行输入,也不损耗智能手表的续航时间。
附图说明
图1是用户在手背敲击虚拟九宫格打字示意图;
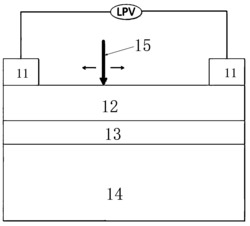
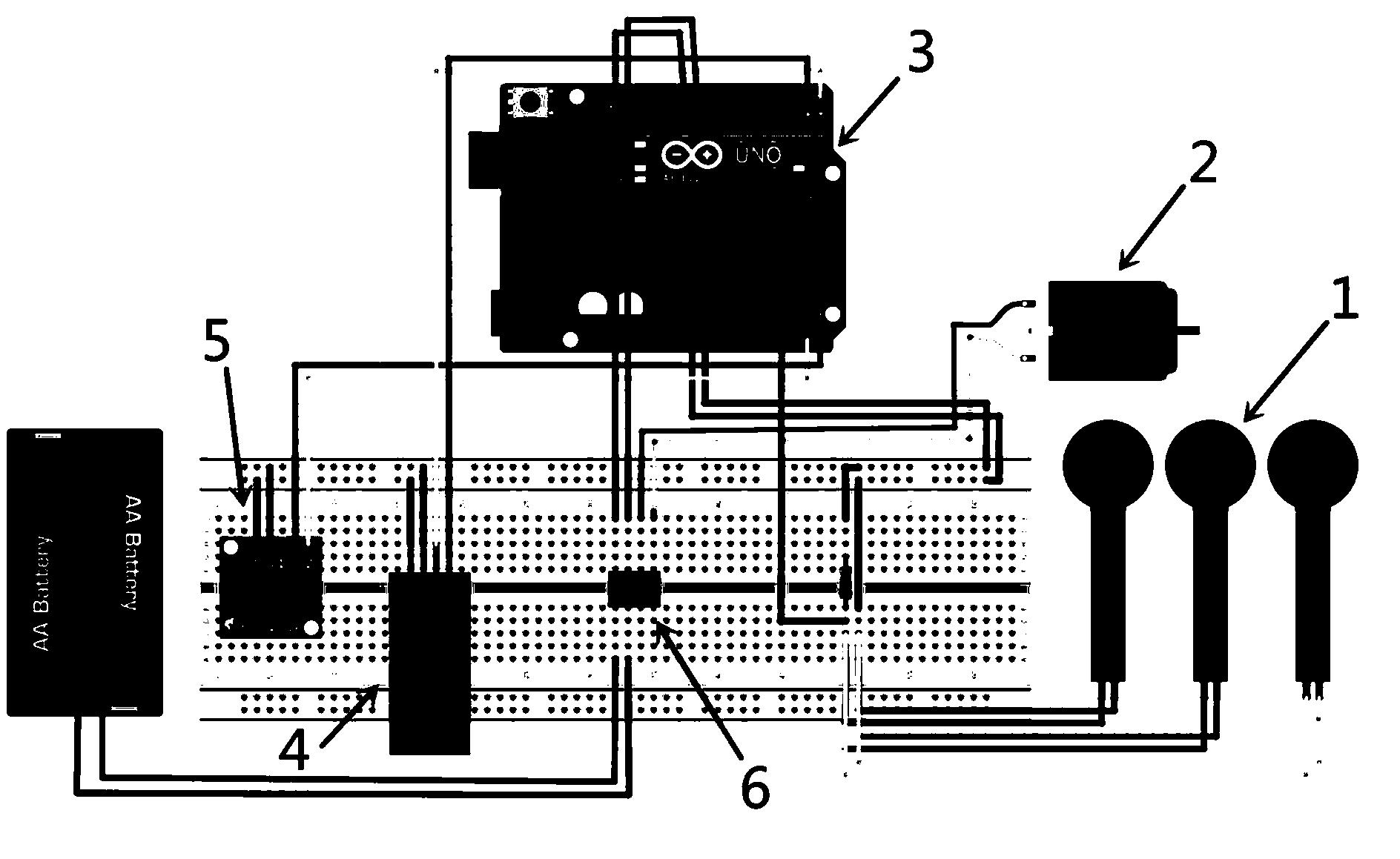
图2是压电陶瓷振动传感器的原理图;
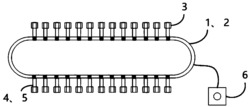
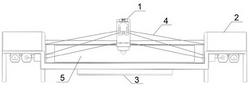
图3是压电陶瓷振动传感器的结构图;
图4是原始信号波形图;
图5是自适应滤波图;
图6是低通滤波图;
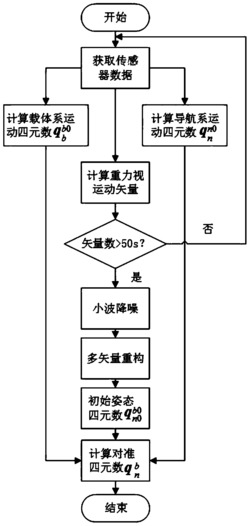
图7是RNM算法流程图。
具体实施方式
如图1所示,本发明公开了一种基于骨传导振动信号传播的智能输入方法,包括如下步骤:
S1.接收步骤,智能设备用振动传感器接收振动信号,并对振动信号进行降噪处理;
S2.提取步骤,利用双门限端点检测法检测并提取由于敲击人体指定部位产生的振动信号片段;
S3.处理步骤,提取信号特征,基于RNM算法来分类信号位置。
在所述S2.提取步骤中,人体指定部位为手背;
振动传感器为压电陶瓷振动传感器,智能设备包括智能手表,压电陶瓷振动传感器内置在智能手表里,图2、3为压电陶瓷振动传感器的原理图和结构图。因压电效应使内部极性产生变化,对外显示出电压的变化,让操作者敲击手背,采集敲击所产生的振动信号。
图4为原始信号波形图,可以看出所采集的原始信号对外界抗干扰能力强,噪声较少。图5使用自适应滤波和图6使用低通滤波之后的波形图。低通滤波保留了信号更多的特征,对之后分类微小差别的振动信号的效果更好。
所述S1.接收步骤中,对振动信号进行降噪处理包括:
步骤S11,使用20Hz的巴特沃斯高通滤波器滤掉直流分量和低频噪声;
步骤S12,使用800Hz低通滤波滤掉高频噪声。
在所述S2.提取步骤中包括:
步骤S21,对处理的信号设置高、低两个门限;
步骤S22,当信号的能量或过零率超越低门限,初步确定敲击信号起点,而当信号的能量或过零率突破高门限,才确定敲击信号真正的起点;当信号能量和过零率同时低于低门限时,确定信号终点;
步骤S23,只保留起点至终点的数据,得到由敲击手背产生的振动信号片段。
在S3.处理步骤中,提取信号特征包括:将初始化训练样本中起始点和终点最长的作为切段信号统一的长度,对切段后长度一致的信号进行归一化,使用公式为: 其中x是振动信号,n是信号的维度。对归一化后的信号进行特征提取,减少计算量,并保留原信号大部分信息,特征提取的是信号的梅尔频率倒频谱系数,同时保留了时域和频域的特征。
所述S3.处理步骤中包括:
步骤S31,对切段信号进行归一化,提取梅尔频率倒频谱系数,得到信号特征;
步骤S32,对信号特征使用基于随机子空间和最近中心点算法的RNM算法进行分类,进而判断出敲击位置;
如图7所示,在所述步骤S32中,基于RNM算法来分类信号位置包括:包括:
步骤S321,根据敲击位置的不同,采集步骤S31得到的信号特征作训练样本,并进行分类(按照九宫格位置分成9类);
步骤S322,使用最近中心点算法计算训练样本的每一类中心点;
步骤S323,基于随机子空间,测试样本与训练样本的类中心点多次在子空间对比,得到多个分类结果;
步骤S324,对分类结果使用简单多数投票原则,并且设置一定票数比例,获得多数票同时达到一定的票数的情况下得到最终分类结果;
步骤S325,将分类成功的样本归入新的训练样本,重新计算新训练样本的新类中心点。
在所述步骤S321中,对手背不同位置敲击,采集得到步骤S31的信号特征作为训练样本,标记位置并根据位置的不同分成n类,每类敲击m次,其中n与m大于或等于1;
在所述步骤S323中,将步骤S322中每一次产生的类中心分别随机抽样T个属性,重复以上操作Q次,得到Q个子空间,在子空间里逐一对比测试样本与训练样本的各个类中心点的欧式距离,找到最近中心点,即得到Q个子空间分类的结果,其中T、Q大于1。
本发明还公开了一种基于骨传导振动信号传播的智能输入系统,包括:
接收模块,智能设备用振动传感器接收振动信号,并对振动信号进行降噪处理;
提取模块,利用双门限端点检测法检测并提取由于敲击人体指定部位产生的振动信号片段;
处理模块,提取信号特征,基于RNM算法来分类信号位置。
在所述提取模块中包括:
第一提取模块,用于对处理的信号设置高、低两个门限;
第二提取模块,用于当信号的能量或过零率超越低门限,初步确定敲击信号起点,而当信号的能量或过零率突破高门限,才确定敲击信号真正的起点;当信号能量和过零率同时低于低门限时,确定信号终点;
第三提取模块,用于只保留起点至终点的数据,其余作切段处理,得到由敲击手背产生的振动信号片段。
所述处理模块中包括:
第一处理模块,用于对切段信号进行归一化,提取梅尔频率倒频谱系数,得到信号特征;
第二处理模块,用于对信号特征使用基于随机子空间和最近中心点算法的RNM算法进行分类,进而判断出敲击位置;
所述第二处理模块包括:
第一处理单元,用于根据敲击位置的不同,采集步骤S31得到的信号特征作训练样本,并进行分类;
第二处理单元,用于使用最近中心点算法计算训练样本的每一类中心点;
第三处理单元,用于基于随机子空间,测试样本与训练样本的类中心点多次在子空间对比,得到多个分类结果;
第四处理单元,用于对分类结果使用简单多数投票原则,并且设置一定票数比例,获得多数票同时达到一定的票数的情况下得到最终分类结果;
第五处理单元,用于将分类成功的样本归入新的训练样本,重新计算新训练样本的新类中心点。
在所述第一处理单元中,对手背不同位置敲击,采集得到步骤S31的信号特征作为训练样本,标记位置并根据位置的不同分成n类,每类敲击m次,其中n与m大于或等于1;
在所述第三处理单元中,将第二处理单元中每一次产生的类中心分别随机抽样T个属性,重复以上操作Q次,得到Q个子空间,在子空间里逐一对比测试样本与训练样本的各个类中心点的欧式距离,找到最近中心点,即得到Q个子空间分类的结果,其中T、Q大于1。
在所述提取模块中,人体指定部位为手背;振动传感器为压电陶瓷振动传感器。
所述接收模块中,对振动信号进行降噪处理包括:
第一接收模块,用于使用20Hz的巴特沃斯高通滤波器滤掉直流分量和低频噪声;
第二接收模块,用于使用800Hz低通滤波滤掉高频噪声。
本发明在智能手表上嵌入微小细薄的压电传感器,这种压电传感器可以实现机械能到电能的转化。在手背上虚拟一个九宫格键盘,当手指敲击不同位置的格子时,机械波会四面八方地传播出去,碰到物体后反射回来。所以,基于机械波的广播性质,压电传感器一次会接收到带有不同多径传播的机械波信号。这种机械波信号一方面通过语音信号散播到空气中,另一方面在手的内部传播,及所谓的骨传导。这部分机械波信号不受环境噪声的影响,能较好地被压电传感器接受,转化成电信号由智能手表的控制器处理。因为不同格子产生的机械波多径效应不同,智能手表接收到的信号就有所不同,利用这种差异,结合机器学习的分类算法,可以分类出九宫格的每一个按键。由此,可以实现基于手背骨传导技术的智能手表文本输入方法及系统。
本发明在智能手表内置压电陶瓷振动传感器,首次将采集到的敲击手背的振动作为智能手表的文本输入方式,将手背作为智能手表小屏幕的虚拟大屏幕,便于实现文本输入;所采集的是敲击手背后在人手上多径传播后的振动信号,抗干扰性强,并且对信号进行降噪,切段,归一化,提取梅尔频率倒频谱系数等处理后,再使用发明的RNM算法进行分类,其识别率达到92%。此处所使用的算法复杂度也只是线性阶的,所以可以实现文本的快速输入。此外,压电陶瓷振动传感器耗电量极底,不会大幅减少智能手表的续航时间。
本发明不仅解决智能手表文本输入方式的问题,还能达到高识别率,并且可以快速进行输入,也不损耗智能手表的续航时间。
本发明的硬件成低,系统简单,使用方便,能够简单快速的实现基于手背的骨传导振动信号传播的智能手表的输入。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
基于骨传导振动信号传播的智能输入方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0