









专利摘要
本发明为有效调控电流体动力学直写图案线宽的均匀性,提出一种电流体动力学直写过程的全闭环实时自适应控制方法,第一步,构建参数预测模型;第二步,对期望直写图案线宽r(k)进行柔性化处理;第三步,对柔化处理后的直写图案线宽wr(k)进行实时滚动优化;第四步,对射流模型形态的进行控制,第五步、实时反馈校正,通过在线实时检测方法,对参数预测模型进行在线修正,然后进行实时滚动优化,从而实现电流体动力学直写过程的全闭环实时控制,实时检测电流体动力学直写图案的轮廓形状、基板的移动速度以及喷射高度的变化,自适应调控直写射流的多物理场耦合模型,有效控制电流体动力学直写射流形态,从而实现直写图案的线宽均匀性控制。
权利要求
1.一种电流体动力学直写过程的全闭环自适应控制方法,其特征在于:其包括电流体动力学直写参数模型预测控制方法以及在线实时检测方法,
所述电流体动力学直写参数模型预测控制方法包括以下步骤:
第一步,构建参数预测模型,根据电流体动力学直写射流的多物理场耦合数值模型,采用粒计算和支持向量机相结合的方法,构建参数预测模型;
第二步,对期望直写图案线宽r(k)进行柔性化处理,并获得柔化处理模型wr(k)=βw(k)+(1-β)r(k),其中w(k)为实际直写图案线宽,wr(k)为柔化处理后的直写图案线宽,β取值为[0,1);
第三步,对柔化处理后的直写图案线宽wr(k)进行实时滚动优化,并获得优化目标J=min{[wm(k)-wr(k)]2+[u(k)-u(k-1)]2},其中u(k)为射流模型的参数;
第四步,从第一步、第二步以及第三步得到每个时刻的射流多物理场耦合数值模型的多个参数值,并对射流多物理场耦合数值模型形态进行控制;
第五步,实时反馈校正,通过在线实时检测方法,在每个采样周期,实时检测直写图案的线宽,并根据实际检测的图案线宽,对参数预测模型进行在线修正,然后进行实时滚动优化,从而实现电流体动力学直写过程的全闭环实时控制,其中在线实时检测方法包括:在每个采样周期,实时检测电流体动力学直写图案的轮廓形状、基板的移动速度以及喷射的高度变化。
2.根据权利要求1所述的电流体动力学直写过程的全闭环自适应控制方法,其特征在于:在第一步构建参数预测模型中,其包括以下两个部分:
一、采用多维搜索算法和支持向量机相结合的思想对参数预测模型进行结构建模;
二、以基于信息粒度支持向量机的建模方法,对参数预测模型进行模型建模。
3.根据权利要求2所述的电流体动力学直写过程的全闭环自适应控制方法,其特征在于:在模型建模中,首先对参数预测模型wm(u)=w·φ(u)+b进行二次型非线性优化方法优化,并得到二次型优化问题以对偶形式表示: 其约束条件为
采用信息粒度支持向量机方法对二次型优化问题以对偶形式表示进行处理,得到参数预测模型的解析表达式 其中φ(u)为非线性映射,b为截距,αi和 为Lagrange乘子,K(·)为核函数。
4.根据权利要求3所述的电流体动力学直写过程的全闭环自适应控制方法,其特征在于:其中核函数为多项式形式,即K(xi,xj)=(αφ(ui)T·φ(uj)+r)p,α>0。
5.根据权利要求1所述的电流体动力学直写过程的全闭环自适应控制方法,其特征在于:通过数控检测装置对基板移动速度进行实时检测。
6.根据权利要求1所述的电流体动力学直写过程的全闭环自适应控制方法,其特征在于:通过激光测距法对喷射高度进行实时检测。
7.根据权利要求1所述的电流体动力学直写过程的全闭环自适应控制方法,其特征在于:采用机器视觉方法对直写图案轮廓进行原位滚动式局部图案轮廓实时检测。
8.根据权利要求7所述的电流体动力学直写过程的全闭环自适应控制方法,其特征在于:原位滚动式局部图案轮廓实时检测包括以下三个步骤:
步骤一、图像复原,采用高斯滤波方法对高速摄像机拍摄的局部图案的图像进行降噪处理,然后对图像进行复原处理,采用Lucy-Richardson迭代算法对降噪后的局部图案的图像进行复原处理,获得复原图像f(x,y): 其中fk-1(x,y)是f(x,y)第k-1次迭代结果,fk(x,y)是f(x,y)第k次迭代结果,k>1,g(x,y)表示降噪处理后的局部图案的图像,h(x,y)表示点扩展函数;
步骤二、轮廓提取,采用基于形态学方法对图案轮廓C(x,y)进行提取,获得基于形态学的轮廓检测算子为:
其中,f(x,y)表示复原图像,B(x,y)表示结构元素, 表示膨胀操作, 表示腐蚀操作;
步骤三、误差计算,将提取的局部图案边缘轮廓与预测模型输出边缘轮廓进行比较,在边缘轮廓的法向方向求解像素的偏差Δp(i,j),(i,j)为像素点坐标,沿着轮廓边缘多个位置取偏差,并取均值 得到当前时刻实际直写图案线宽与预测模型输出直写线宽之间误差ΔP(k): 其中,k表示标定系数。
说明书
技术领域
本发明涉及电流体动力学打印技术领域,尤其涉及一种电流体动力学直写过程的全闭环自适应控制方法。
背景技术
柔性电子是将有机或无机薄膜电子器件制作在柔性塑料或薄金属基板上的一种新兴电子技术,以其独特的柔性、延展性以及高效、低成本制造工艺,使柔性电子从可穿戴电子设备、生物医学领域到能源技术和太空科学等多个领域具有广泛的应用前景,因此柔性电子已成为电子产业发展的一个热点,在世界范围内引起广泛关注。柔性电子具有可移植、轻质、可伸展、弯曲、携带方便等特点,被公认为下一代电子通用平台,包括智能纺织物、太阳能薄膜电池、机薄膜晶体管、柔性电子显示器、柔性电子存储、RFID标签、柔性生物器件、智能皮肤、大面积传感器、金属疲劳监测等。电流体动力学直写技术适合聚合物和金属纳米颗粒等溶液的打印,是制造微/纳米结构器件的一种新型制造技术。
在电流体动力学打印过程中,从泰勒锥顶端喷出的射流携带电荷,在电荷排斥力和不均匀电场力作用下射流将产生不稳定的鞭动现象,射流形态可控性较差,从而影响打印图案的质量。为了实现射流的可控性,提高打印图案的质量,采用电流体动力学直写技术,其原理是缩短喷头与基板之间的距离,利用射流产生鞭动之前的一段相对稳定的射流,进行打印图案。
电流体动力学打印涉及流场、电场和速度场等多物理场耦合的科学问题。在电场力作用下流体内部自由电子/离子的迁移行为以及外加电场与液滴自生电场之间的耦合,导致流体表面电荷再分布,从而影响表面电荷密度。在电流体动力学打印过程中,运动平台并不是严格地按照匀速进行运动,而是经过加速阶段、匀速阶段和减速阶段等运动,因此在电流体动力学打印过程中,基板移动速度会发生变化。另外,由于制造工艺造成基板平面在高度方向上发生变化,从而引起喷射高度的变化,这些因素影响电流体动力学打印射流的形态。然而,根据研究现状分析,无论是采用理论分析和数值模拟,还是实验方法研究,目前研究均在开环系统中对多物理场的静态参数进行耦合研究,因此难以保证打印图案的质量。
为解决电流体动力学直写图案线宽的均匀性问题,根据流场、电场和速度场等多物理场耦合关系,提出一种电流体动力学直写过程的全闭环实时自适应控制方法,全程实现实时自适应控制直写图案的质量,实现电流体动力学直写器件的功能形面的精确成形。
发明内容
本发明的目的在于有效调控电流体动力学直写图案线宽的均匀性,并提出一种电流体动力学直写过程的全闭环实时自适应控制方法。
本发明的技术方案是:一种电流体动力学直写过程的全闭环自适应控制方法,其包括电流体动力学直写参数模型预测控制方法以及在线实时检测方法,
所述电流体动力学直写参数模型预测控制方法包括以下步骤:
第一步,构建参数预测模型,根据电流体动力学直写射流的多物理场耦合数值模型,采用粒计算和支持向量机相结合的方法,构建参数预测模型;
第二步,对期望直写图案线宽r(k)进行柔性化处理,并获得柔化处理模型wr(k)=βw(k)+(1-β)r(k),其中w(k)为实际直写图案线宽,wr(k)为柔化处理后的直写图案线宽,β取值为[0,1);
第三步,对柔化处理后的直写图案线宽wr(k)进行实时滚动优化,并获得优化目标J=min{[wm(k)-wr(k)]2+[u(k)-u(k-1)]2},其中u(k)为射流模型的参数;
第四步,从第一步、第二步以及第三步得到每个时刻的射流多物理场耦合数值模型的多个参数值,并对射流多物理场耦合数值模型形态进行控制;
第五步,实时反馈校正,通过在线实时检测方法,在每个采样周期,实时检测直写图案的线宽,并根据实际检测的图案线宽,对参数预测模型进行在线修正,然后进行实时滚动优化,从而实现电流体动力学直写过程的全闭环实时控制,
其中在线实时检测方法包括:在每个采样周期,实时检测电流体动力学直写图案的轮廓形状、基板的移动速度以及喷射的高度变化。
在第一步构建参数预测模型中,其包括以下两个部分:
一、采用多维搜索算法和支持向量机相结合的思想对参数预测模型进行结构建模;
二、以基于信息粒度支持向量机的建模方法,对参数预测模型进行模型建模。
在模型建模中,首先对参数预测模型wm(u)=w·φ(u)+b进行二次型非线性优化方法优化,并得到二次型优化问题以对偶形式表示:
其约束条件为
采用信息粒度支持向量机方法对二次型优化问题以对偶形式表示进行处理,得到参数预测模型的解析表达式 其中φ(u)为非线性映射,b为截距,αi和 为Lagrange乘子,K(·)为核函数。
其中核函数为多项式形式,即K(xi,xj)=(αφ(ui)T·φ(uj)+r)p,α>0。
通过数控检测装置对基板移动速度进行实时检测。
通过激光测距法对喷射高度进行实时检测。
采用机器视觉方法对直写图案轮廓进行原位滚动式局部图案轮廓实时检测。
原位滚动式局部图案轮廓实时检测包括以下三个步骤:
步骤一、图像复原,采用高斯滤波方法对高速摄像机拍摄的局部图案的图像进行降噪处理,然后对图像进行复原处理,采用Lucy-Richardson迭代算法对降噪后的局部图案的图像进行复原处理,获得复原图像f(x,y): 其中fk-1(x,y)是f(x,y)第k-1次迭代结果,fk(x,y)是f(x,y)第k次迭代结果,k>1,g(x,y)表示降噪处理后的局部图案的图像,h(x,y)表示点扩展函数;
步骤二、轮廓提取,采用基于形态学方法对图案轮廓C(x,y)进行提取,获得基于形态学的轮廓检测算子为:
其中,f(x,y)表示复原图像,B(x,y)表示结构元素, 表示膨胀操作, 表示腐蚀操作;
步骤三、误差计算,将提取的局部图案边缘轮廓与预测模型输出边缘轮廓进行比较,在边缘轮廓的法向方向求解像素的偏差Δp(i,j),(i,j)为像素点坐标,沿着轮廓边缘多个位置取偏差,并取均值 得到当前时刻实际直写图案线宽与预测模型输出直写线宽之间误差ΔP(k): 其中,k表示标定系数。
本发明的有益效果是实时检测电流体动力学直写图案的轮廓形状、基板的移动速度以及喷射高度的变化,自适应调控直写射流的多物理场耦合模型,有效控制电流体动力学直写射流形态,从而实现直写图案的线宽均匀性控制。
附图说明
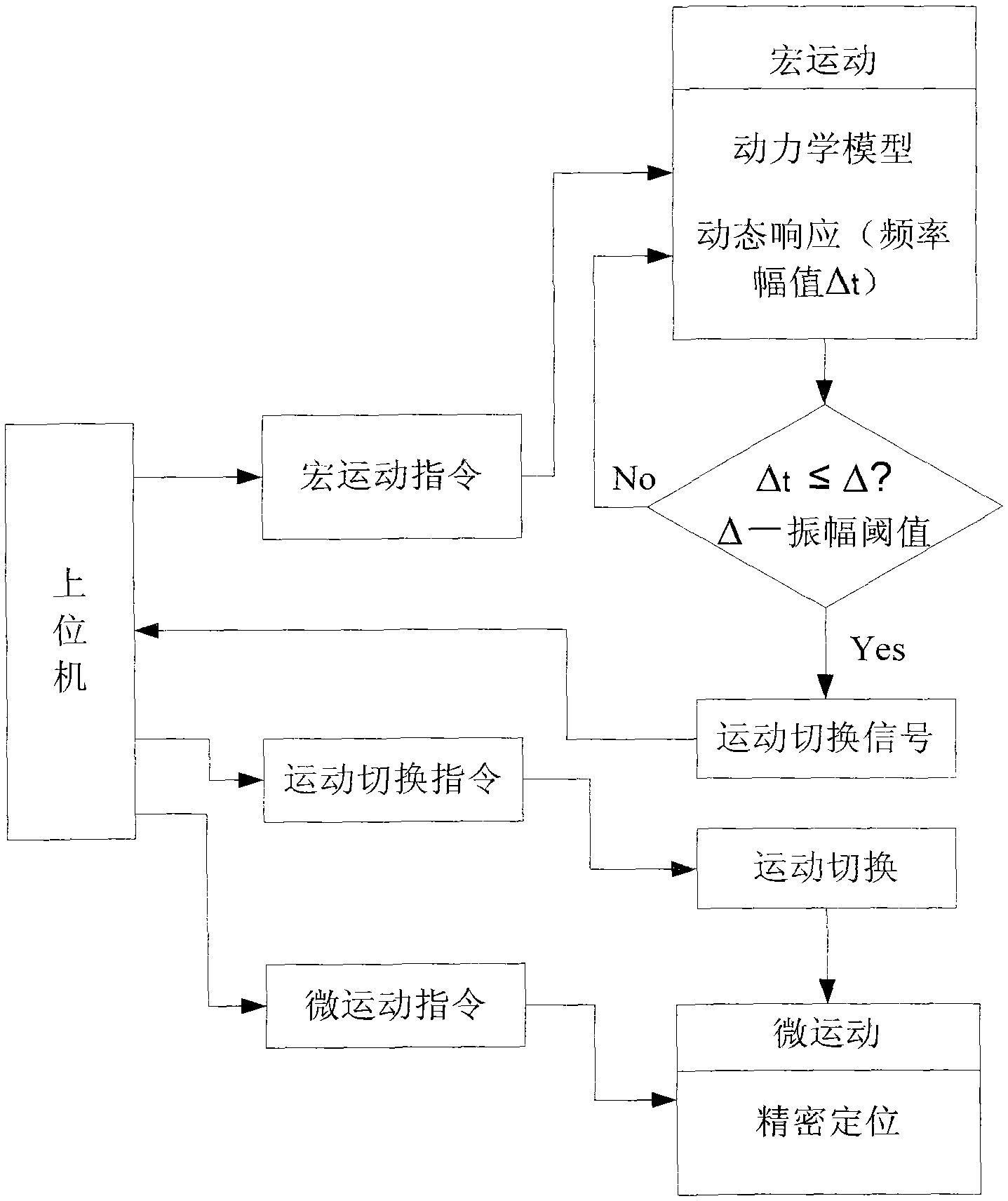
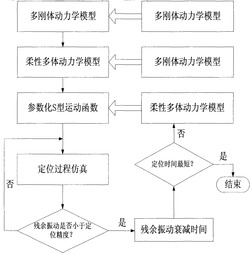
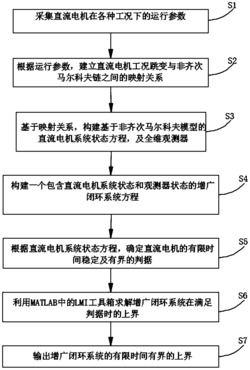
图1为本发明的直写过程的参数模型预测控制的逻辑流程图。
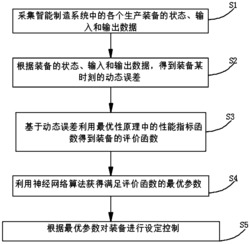
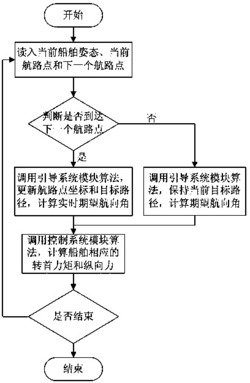
图2为本发明的参数预测模型建模的逻辑框图。
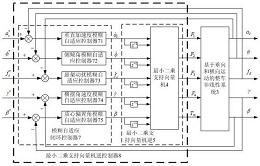
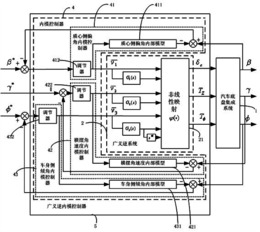
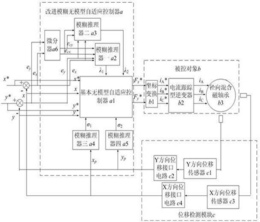
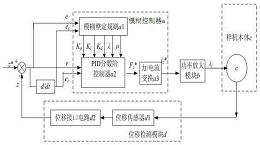
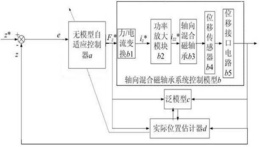
图3为本发明的电流体动力学直写全闭环实时自适应控制方案图。
具体实施方式
下面针对附图对本发明的实施例作进一步说明:
如图所示,本发明公开了一种电流体动力学直写过程的全闭环自适应控制方法,其包括电流体动力学直写参数模型预测控制方法以及在线实时检测方法,
所述电流体动力学直写参数模型预测控制方法包括以下步骤:
第一步、构建参数预测模型,根据电流体动力学直写射流的多物理场耦合数值模型,采用粒计算和支持向量机相结合的方法,构建参数预测模型;
在第一步构建参数预测模型中,其包括以下两个部分:
一、采用多维搜索算法和支持向量机相结合的思想对参数预测模型进行结构建模;
二、以基于信息粒度支持向量机的建模方法,对参数预测模型进行模型建模。
采用多维搜索算法和支持向量机相结合的思想对参数预测模型进行结构建模;研究基于信息粒度支持向量机的建模方法,对参数预测模型进行模型建模,以电流体动力学直写射流的多物理场耦合数值模型的多参数为自变量,建模过程包括结构建模和模型建模两个部分。
其中结构建模以均方根误差为目标函数,采用多维搜索算法和支持向量机相结合的方法,以目标函数最小值为优化目标,对参数预测模型的阶次进行优化求解。多维搜索算法是根据专家经验确定每个被优化参数的合理取值范围,然后对每个参数在其取值范围内按照设定的规则进行取值,得到若干组参数组合,采用留一法的思想,对每组参数组合进行计算,求其目标函数值,在所有组合中对应于目标函数值最小的参数组合,得到最优的参数值,从而确定参数预测模型的阶次。
模型建模采用粒计算和支持向量机相结合的思想,提出一种基于信息粒度支持向量机的建模方法对参数预测模型进行建模,利用粒度计算的信息粒化技术优化支持向量,根据优化的支持向量,采用二次型非线性优化方法构建参数预测模型,设参数预测模型为:
wm(u)=w·φ(u)+b (1)
式中,φ(u)为非线性映射,b为截距。采用二次型非线性优化方法,二次型优化问题以对偶形式表示为:
约束条件为:
式中,αi和 为Lagrange乘子,K(·)为核函数,为提高参数预测模型的建模精度,核函数设计成多项式形式,其表达式表示为:
K(xi,xj)=(αφ(ui)T·φ(uj)+r)p,α>0
采用信息粒度支持向量机方法对式(2)进行求解,得到参数预测模型解析表达式为:
第二步、在实时滚动优化求解射流多物理场耦合数值模型的参数过程中,如果直接采用期望直写图案线宽作为跟踪目标,当实际直写图案线宽和期望直写图案线宽之间差值过大,造成射流多物理场耦合数值模型的参数波动大,从而引起直写图案线宽的波动。因此采用一阶平滑滤波方法,其柔化处理模型为:
wr(k)=βw(k)+(1-β)r(k) (4)
其中w(k)为实际直写图案线宽,wr(k)为柔化处理后的直写图案线宽,β取值为[0,1);
第三步、采用实时滚动优化控制方法,使直写过程中每个时刻参数预测模型直写图案的线宽和期望直写图案线宽之间差值最小,同时考虑射流多物理场耦合数值模型的参数变化过大,导致实际直写图案线宽的波动,这种优化是在每个时刻有限时域内优化过程,同时又随着时间向前滚动,因此优化目标可以表示为:
J=min{[wm(k)-wr(k)]2+[u(k)-u(k-1)]2} (5)
其中u(k)为射流模型的参数;
第四步、根据式(3)、式(4)和式(5),得到每个时刻的射流多物理场耦合数值模型的多个参数值,从而实现对射流模型形态的控制。
第五步、实时反馈校正,在黏性聚合物溶液的电流体动力学直写过程中,由于基板移动速度、喷射高度和一些不确定因素的变化,需要采用实时手段补充参数预测模型控制的不足。在每个采样周期,实时检测直写图案的线宽,并根据实际检测的图案线宽,采用信息粒度支持向量机方法对参数预测模型进行在线修正,然后进行实时滚动优化,从而实现电流体动力学直写过程的全闭环实时控制。
其中在线实时检测方法包括:在每个采样周期,实时检测电流体动力学直写图案的轮廓形状、基板的移动速度以及喷射的高度变化。
在每个采样周期需要实时检测电流体动力学直写图案轮廓形状、基板移动速度以及喷射高度变化。基板移动速度通过数控检测装置(如光栅尺/光电编码器)进行实时检测;喷射高度通过激光测距法进行实时检测;直写图案轮廓采用机器视觉方法进行原位滚动式局部图案轮廓实时检测,在每个采样周期,实时原位在线检测当前时刻直写的图案轮廓,进行快速图像处理,以满足直写图案线宽检测的实时性要求。
原位滚动式局部图案轮廓实时检测包括以下三个步骤:
步骤一、图像复原,采用高斯滤波方法对高速摄像机拍摄的局部图案的图像进行降噪处理,然后对图像进行复原处理,采用Lucy-Richardson迭代算法对降噪后的局部图案的图像进行复原处理,获得复原图像f(x,y):
其中fk-1(x,y)是f(x,y)第k-1次迭代结果,fk(x,y)是f(x,y)第k次迭代结果,k>1,g(x,y)表示降噪处理后的局部图案的图像,h(x,y)表示点扩展函数;
步骤二、轮廓提取,采用基于形态学方法对图案轮廓C(x,y)进行提取,具有良好的抗噪能力,又能很好地保留原有图像中的细节,获得基于形态学的轮廓检测算子为:
其中,f(x,y)表示复原图像,B(x,y)表示结构元素, 表示膨胀操作, 表示腐蚀操作。
步骤三、误差计算,将提取的局部图案边缘轮廓与预测模型输出边缘轮廓进行比较,在边缘轮廓的法向方向求解像素的偏差Δp(i,j),(i,j)为像素点坐标,沿着轮廓边缘多个位置取偏差,并取均值 得到当前时刻实际直写图案线宽与预测模型输出直写线宽之间误差ΔP(k):
其中,k表示标定系数。
作为一个实施例,电流体动力学直写全闭环实时自适应控制方法,其实现平台包括高压电源、流量泵、机械结构和运动平台,运动平台XY轴采用交流伺服直线电机进行驱动,喷头的Z轴运动采用交流伺服电机进行驱动,数控检测装置采用光栅尺进行位置检测,喷射高度变化采用高精度的激光测量仪检测。控制系统硬件包括工控机、控制器和机器视觉(观测射流的CCD工业相机和光源、观测基板打印图案的高速摄像机和光源),全闭环实时自适应控制系统结构图如图3所示。工控机作为上位机,完成控制系统的人机交互、管理、监控等各个模块的协调任务。工控机通过PCI总线与运动控制器和直写全闭环控制器通讯;下位机由运动控制器和双DSP+FPGA全闭环实时控制器组成,运动控制器完成XY轴运动平台和喷头Z轴升降的运动控制。双DSP+FPGA全闭环实时控制器完成电流体动力学直写过程中全闭环实时控制,其中包括电流体动力学直写过程中的全闭环实时自适应控制和直写图案的原位在线实时检测。为了满足直写图案在线检测的实时性要求,采用双DSP+FPGA的模式进行快速实时图像处理,由FPGA完成图像预处理,对采集的图像数据信息进行分割,并将分割的图像数据传送给DSP,完成图像并行处理,完成分割图像的图像复原和轮廓提取,处理后的图像数据传送到FPGA的双口RAM,DSP其中的1个DSP通过FPGA的双口RAM读取图像并行处理后的信息,进行图像综合处理,完成图像轮廓误差计算,由另一个DSP完成电流体动力学直写过程的参数模型预测控制。为了满足实时控制的要求,对于电流体动力学直写过程中的在线实时检测模块,通过高速摄像机对图案的轮廓进行观测,并将采集的信息,通过千兆以太网输送到上位机,上位机快速完成图像信息的处理和计算,以满足电流体动力学直写控制的实时性要求。
实施例不应视为对本发明的限制,但任何基于本发明的精神所作的改进,都应在本发明的保护范围之内。
电流体动力学直写过程的全闭环实时自适应控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0