







专利摘要
本发明提供一种无阀液压伺服系统及其控制方法,其中该无阀液压伺服系统包括:交流伺服电机、双向变量泵、液压缸、压力传感器、位移传感器、速度传感器、以及控制器,控制器根据第一、第二压力传感器检测得到的压力值、位移传感器检测得到的位移值以及速度传感器检测得到的速度值而输出控制指令以令交流伺服电机调节转速和/或双向变量泵调节排量。相对于现有技术,本发明可以实现交流伺服电机转速可变以及液压泵的排量可变,整个系统控制更加灵活,适用于各类情形,效率较高,同时能延长交流伺服电机和液压元件的使用寿命,能提高资源的利用率。
权利要求
1.一种无阀液压伺服系统,其特征在于,包括:交流伺服电机、双向变量泵、液压缸、控制器,所述交流伺服电机通过联轴器与所述双向变量泵连接,所述双向变量泵的进、出油口分别与所述液压缸的进、出油口连通,所述液压缸的进、出油口分别配置有第一压力传感器和第二压力传感器,所述液压缸在油液驱动下协同负载动作,所述负载处配置有位移传感器和速度传感器,所述第一、第二压力传感器、所述位移传感器、所述速度传感器与所述控制器连接组成闭环控制回路,所述控制器与所述交流伺服电机和所述双向变量泵连接,所述控制器根据所述第一、第二压力传感器检测得到的压力值、所述位移传感器检测得到的位移值以及所述速度传感器检测得到的速度值而向对应的所述交流伺服电机和/或所述双向变量泵输出供调节所述交流伺服电机的转速和/或调节所述双向变量泵的排量的控制指令。
2.如权利要求1所述的无阀液压伺服系统,其特征在于,所述联轴器为弹性联轴器。
3.如权利要求1所述的无阀液压伺服系统,其特征在于,所述液压缸为非对称液压缸,所述双向变量泵至所述液压缸的两油路之间配置有无动力补油装置。
4.如权利要求1所述的无阀液压伺服系统,其特征在于,所述无动力补油装置包括在所述双向变量泵至所述液压缸的两油路之间并联的双联液压锁,所述双联液压锁的进油口与油箱连接。
5.一种如权利要求1至4中任一所述无阀液压伺服系统的控制方法,其特征在于,包括:
所述交流伺服电机根据所述控制器发出的控制指令启动运转,通过所述联轴器带动所述双向变量泵作动以产生液压流量输出,驱动所述液压缸和所述负载运动;
所述第一、第二压力传感器、所述位移传感器、以及所述速度传感器分别检测获得压力值、位移值以及速度值,并将各个检测值反馈至所述控制器;
所述控制器根据所述第一、第二压力传感器检测得到的压力值、所述位移传感器检测得到的位移值以及所述速度传感器检测得到的速度值而输出供调节所述交流伺服电机的转速和/或调节所述双向变量泵的排量的控制指令。
6.如权利要求5所述的无阀液压伺服系统的控制方法,其特征在于,还包括:预先设定所述无阀液压伺服系统所需的压力阈值区间、位移阈值区间、速度阈值区间,以供所述控制器根据所述第一、第二压力传感器检测得到的压力值、所述位移传感器检测得到的位移值以及所述速度传感器检测得到的速度值分别与压力阈值区间、位移阈值区间、以及速度阈值区间进行比较判定,从而输出相应的控制指令。
7.如权利要求6所述的无阀液压伺服系统的控制方法,其特征在于,
当所述交流伺服电机准备启动时,在负载过大的情形下,所述控制器控制所述双向变量泵减小排量,减小所述双向变量泵的转矩,使所述交流伺服电机正常启动;
当所述交流伺服电机正常启动后,所述控制器控制所述双向变量泵增大排量,获得大流量输入。
8.如权利要求6所述的无阀液压伺服系统的控制方法,其特征在于,
当所述第一、第二压力传感器检测得到的压力值小于预设的压力阈值区间的下限值时,所述双向变量泵处于大排量,液压缸的流量随着所述交流伺服电机的转速而改变,所述控制器根据所述位移传感器检测得到的位移值以及所述速度传感器检测得到的速度值而向所述交流伺服电机输出调节转速的控制指令,控制所述液压缸的位移和速度符合预设的位移阈值区间和速度阈值区间;
随着压力的升高,所述交流伺服电机的转矩会增加,所述控制器控制所述双向变量泵减小排量,减小所述交流伺服电机的输出转矩;
当压力达到预设的压力阈值区间时,所述无阀液压伺服系统处于保压状态,所述控制器控制所述双向变量泵减小排量,从而减小流量。
9.如权利要求6所述的无阀液压伺服系统的控制方法,其特征在于,
当所述负载出现波动时,所述控制器根据所述位移传感器检测得到的位移值以及所述速度传感器检测得到的速度值而控制所述交流伺服电机调节转速或控制所述双向变量泵调节排量,使无阀液压伺服系统回到平衡状态。
10.如权利要求6所述的无阀液压伺服系统的控制方法,其特征在于,
当所述负载出现过载时,所述无阀液压伺服系统内的压力会急剧上升,利用所述第一、第二压力传感器来进行过载保护;
当所述第一、第二压力传感器检测得到的压力值大于预设的压力阈值区间的上限值时,所述控制器根据所述第一、第二压力传感器检测得到的压力值而控制所述交流伺服电机迅速减小转速,直至所述液压缸运动到安全位置;
当所述位移传感器检测得到的位移值大于预设的位移阈值区间的上限值或所述速度传感器检测得到的速度值超过预设的速度阈值区间的上限值时,所述控制器控制所述交流伺服电机减小转速。
说明书
技术领域
本发明涉及液压传动控制领域,尤其涉及一种无阀液压伺服系统及其控制方法。
背景技术
在工业领域中,液压传动控制技术的应用十分广泛。近年来,液压技术与微电子技术的结合使得电液伺服技术得到飞速发展。电液伺服阀控系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统,其综合了电气和液压两方面的优点,具有控制精度高、响应速度快、输出功率大、信号处理灵活、易于实现各种参量的反馈等优点。因此,在负载质量大又要求响应速度快的场合最为适合,其应用已遍及国民经济的各个领域,比如飞机与船舶舵机的控制、雷达与火炮的控制、机床工作台的位置控制、板带轧机的板厚控制、电炉冶炼的电极位置控制、各种飞机车里的模拟台的控制、发电机转速的控制、材料试验机及其他实验机的压力控制等。但是,传统的电液伺服阀控系统,仍存在一些弊端,如损耗大、效率低、精确控制能力较弱、抗污染能力差、卡滞、成本高、管理维修费用高、故障难排除等。
例如针对普通电机加定量泵组合的电液伺服阀控系统,当系统处于保压阶段时,系统中不需要大流量的输出,液压泵输出的流量通过溢流阀回到油箱,做无用功,浪费能源,效率低,可控性低,液压泵和电机长时间运转,会造成系统发热,缩短电机和液压泵的使用寿命。
为改变上述普通电机长时间运转及做无用功的情况,业界又提出了可变速电机加定量泵组合的电液伺服阀控系统,在输出流量时,泵的流量随转速变化而变化,系统压力达到工作压力后(即保压状态),系统仅需要补充液压元件泄漏的小额流量,不需要大流量输出,减小电机转速,减小流量输出。但是,在该系统中,电机的输出扭矩与系统压力和液压泵的排量有关,当系统处于保压状态时,电机会一直处于高转矩的输出状态,会造成电机内部电流过大,短时间内发热大,严重影响电机的正常使用。
发明内容
本发明的目的在于提供一种无阀液压伺服系统及其控制方法,用于解决现有技术中能源浪费,效率低,可控性低,液压泵和电机长时间运转影响使用寿命等问题。
为实现上述目的及其他目的,本发明在一方面提供一种无阀液压伺服系统,包括:交流伺服电机、双向变量泵、液压缸、控制器,所述交流伺服电机通过联轴器与所述双向变量泵连接,所述双向变量泵的进、出油口分别与所述液压缸的进、出油口连通,所述液压缸的进、出油口分别配置有第一压力传感器和第二压力传感器,所述液压缸在油液驱动下协同负载动作,所述负载处配置有位移传感器和速度传感器,所述第一、第二压力传感器、所述位移传感器、所述速度传感器与所述控制器连接组成闭环控制回路,所述控制器与所述交流伺服电机和所述双向变量泵连接,所述控制器根据所述第一、第二压力传感器检测得到的压力值、所述位移传感器检测得到的位移值以及所述速度传感器检测得到的速度值而向对应的所述交流伺服电机和/或所述双向变量泵输出供调节所述交流伺服电机的转速和/或调节所述双向变量泵的排量的控制指令。
上述无阀液压伺服系统,采用交流伺服电机加双向变量泵的组合,可以实现交流伺服电机转速可变以及液压泵的排量可变,整个系统控制更加灵活,适用于各类情形,效率较高,同时能延长交流伺服电机和液压元件的使用寿命,能提高资源的利用率。
本发明一种无阀液压伺服系统的进一步改进在于:所述联轴器为弹性联轴器。
本发明一种无阀液压伺服系统的进一步改进在于:所述液压缸为非对称液压缸,所述双向变量泵至所述液压缸的两油路之间配置有无动力补油装置。
本发明一种无阀液压伺服系统的进一步改进在于:所述无动力补油装置包括在所述双向变量泵至所述液压缸的两油路之间并联的双联液压锁,所述双联液压锁的进油口与油箱连接。
本发明在另一方面提供如上所述的无阀液压伺服系统的控制方法,包括:所述交流伺服电机根据所述控制器发出的控制指令启动运转,通过所述联轴器带动所述双向变量泵作动以产生液压流量输出,驱动所述液压缸和所述负载运动;所述第一、第二压力传感器、所述位移传感器、以及所述速度传感器分别检测获得压力值、位移值以及速度值,并将各个检测值反馈至所述控制器;所述控制器根据所述第一、第二压力传感器检测得到的压力值、所述位移传感器检测得到的位移值以及所述速度传感器检测得到的速度值而输出供调节所述交流伺服电机的转速和/或调节所述双向变量泵的排量的控制指令。
采用上述无阀液压伺服系统的控制方法,采用交流伺服电机加双向变量泵的组合,可以实现交流伺服电机转速可变以及液压泵的排量可变,整个系统控制更加灵活,适用于各类情形,效率较高,同时能延长交流伺服电机和液压元件的使用寿命,能提高资源的利用率。
本发明一种无阀液压伺服系统的控制方法进一步改进在于:所述控制方法还包括:预先设定所述无阀液压伺服系统所需的压力阈值区间、位移阈值区间、速度阈值区间,以供所述控制器根据所述第一、第二压力传感器检测得到的压力值、所述位移传感器检测得到的位移值以及所述速度传感器检测得到的速度值分别与压力阈值区间、位移阈值区间、以及速度阈值区间进行比较判定,从而输出相应的控制指令。
本发明一种无阀液压伺服系统的控制方法进一步改进在于:当所述交流伺服电机准备启动时,在负载过大的情形下,所述控制器控制所述双向变量泵减小排量,减小所述双向变量泵的转矩,使所述交流伺服电机正常启动;当所述交流伺服电机正常启动后,所述控制器控制所述双向变量泵增大排量,获得大流量输入。
本发明一种无阀液压伺服系统的控制方法进一步改进在于:当所述第一、第二压力传感器检测得到的压力值小于预设的压力阈值区间的下限值时,所述双向变量泵处于大排量,液压缸的流量随着所述交流伺服电机的转速而改变,所述控制器根据所述位移传感器检测得到的位移值以及所述速度传感器检测得到的速度值而向所述交流伺服电机输出调节转速的控制指令,控制所述液压缸的位移和速度符合预设的位移阈值区间和速度阈值区间;随着压力的升高,所述交流伺服电机的转矩会增加,所述控制器控制所述双向变量泵减小排量,减小所述交流伺服电机的输出转矩;当压力达到预设的压力阈值区间时,所述无阀液压伺服系统处于保压状态,所述控制器控制所述双向变量泵减小排量,从而减小流量。
本发明一种无阀液压伺服系统的控制方法进一步改进在于:当所述负载出现波动时,所述控制器根据所述位移传感器检测得到的位移值以及所述速度传感器检测得到的速度值而控制所述交流伺服电机调节转速或控制所述双向变量泵调节排量,使无阀液压伺服系统回到平衡状态。
本发明一种无阀液压伺服系统的控制方法进一步改进在于:当所述负载出现过载时,所述无阀液压伺服系统内的压力会急剧上升,利用所述第一、第二压力传感器来进行过载保护;当所述第一、第二压力传感器检测得到的压力值大于预设的压力阈值区间的上限值时,所述控制器根据所述第一、第二压力传感器检测得到的压力值而控制所述交流伺服电机迅速减小转速,直至所述液压缸运动到安全位置;当所述位移传感器检测得到的位移值大于预设的位移阈值区间的上限值或所述速度传感器检测得到的速度值超过预设的速度阈值区间的上限值时,所述控制器控制所述交流伺服电机减小转速。
附图说明
图1为本发明无阀液压伺服系统在一实施例中的系统原理图;
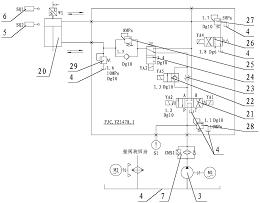
图2为本发明无阀液压伺服系统在一实施例中的系统控制框图;
图3为本发明无阀液压伺服系统的控制方法在一实施例中的流程示意图。
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。
请参阅附图。需要说明的是,本实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
下面结合附图和具体实施例对本发明作进一步说明。
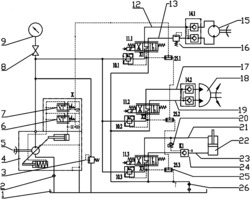
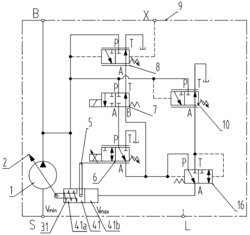
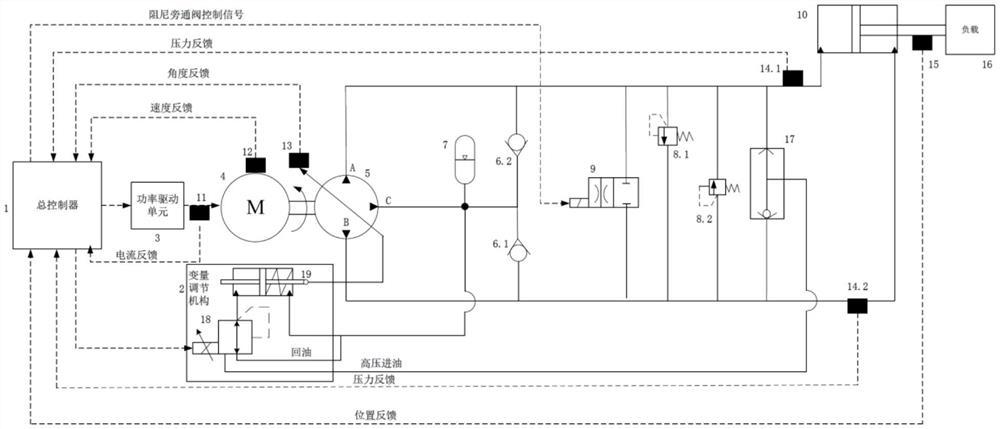
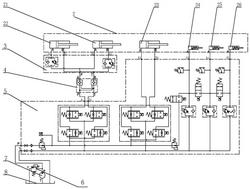
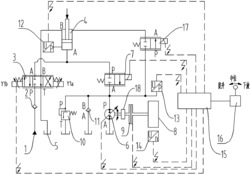
请参阅图1和图2,其中,图1为本发明无阀液压伺服系统在一实施例中的系统原理图,图2为本发明无阀液压伺服系统在一实施例中的系统控制框图。结合图1和图2,本发明无阀液压伺服系统包括:交流伺服电机11、双向变量泵12、液压缸13、压力传感器141、143、位移传感器151、速度传感器153、以及控制器16。
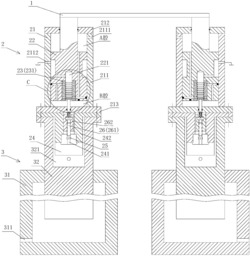
具体地:交流伺服电机11通过联轴器(例如为弹性联轴器)与双向变量泵12连接,双向变量泵12的进、出油口通过油路管道分别与液压缸13的进、出油口连通,其中,液压缸13的进、出油口分别配置有压力传感器141、143,液压缸13在油液驱动下协同负载2动作,负载2处配置有位移传感器151和速度传感器153,压力传感器141、143、位移传感器151、速度传感器153与控制器16连接组成闭环控制回路,控制器16还与交流伺服电机11和双向变量泵12连接。在上述元件中,压力传感器141、143是用于分别检测液压缸的进、出油口的压力值,位移传感器151通过检测负载2的位移而间接得到液压缸13的位移值,速度传感器153通过检测负载2的速度而间接得到液压缸13移动的速度值。在实际应用中,控制器16根据压力传感器141、143检测得到的压力值、位移传感器151检测得到的位移值以及速度传感器153检测得到的速度值而向对应的交流伺服电机和/或双向变量泵输出控制指令以供调节交流伺服电机的转速和/或调节双向变量泵的排量。
额外地,在本实施例中,液压缸13可以是非对称液压缸,由此,可在双向变量泵12至液压缸13的两油路之间配置有无动力补油装置,包括在双向变量泵12至液压缸13的两油路之间并联的双联液压锁17,双联液压锁17的进油口与油箱18连接。在本实施例中,双联液压锁是两个液控单向阀并在一起使用的,其工作原理是一个油口正向进油时,另一油口反向出油;反之亦然。当两油口正向不进油时,反向也不通,不受外界负荷干扰,起到锁的作用。在本发明中,借助于双向变量泵12和所述无动力式补油装置,可以通过改变交流伺服电机11的转向,达到调节非对称液压缸13的运动方向的目的,实现非对称液压缸13的双向运动。
由上可知,本发明的无阀液压伺服系统,采用交流伺服电机加双向变量泵的组合,可以实现交流伺服电机转速可变以及液压泵的排量可变,整个系统控制更加灵活,适用于各类情形,效率较高,同时能延长交流伺服电机和液压元件的使用寿命,能提高资源的利用率。
基于上述的无阀液压伺服系统,本发明另提供了一种基于无阀液压伺服系统的控制方法。请参阅图3,为本发明无阀液压伺服系统的控制方法在一实施例中的流程示意图。
如图3所示,本发明无阀液压伺服系统的控制方法包括:
步骤S201,预先设定无阀液压伺服系统所需的压力阈值区间、位移阈值区间、速度阈值区间。设定的这些参数的阈值区间,作为后续控制器16输出相应控制指令的判定依据。
步骤S203,交流伺服电机11根据控制器16发出的控制指令启动运转,通过联轴器带动双向变量泵12作动以产生液压流量输出,驱动液压缸13和负载2运动。
在本实施例中,当交流伺服电机11准备启动时,若这时候负载过大,很可能让交流伺服电机11停止或不能转,偏离正常运转曲线。因此,在负载过大的情形下,控制器16控制双向变量泵12减小排量,减小双向变量泵12的转矩,使交流伺服电机11正常启动;当交流伺服电机11正常启动后,无阀液压伺服系统中需要大流量输入,由Q=V*n(其中,Q为流量,V为排量,n为转速)可知,应由控制器16控制双向变量泵12增大排量,防止交流伺服电机11转速过高,以增加交流伺服电机11的使用寿命。
步骤205,第一、第二压力传感器141、143、位移传感器151、以及速度传感器153分别检测获得压力值、位移值以及速度值,并将各个检测值反馈至控制器16。在本实施例中,压力传感器141、143是用于分别检测液压缸的进、出油口的压力值,位移传感器151通过检测负载2的位移而间接得到液压缸13的位移值,速度传感器153通过检测负载2的速度而间接得到液压缸13移动的速度值。
步骤S207,控制器16根据第一、第二压力传感器141、143检测得到的压力值、位移传感器151检测得到的位移值以及速度传感器153检测得到的速度值与预设的各个参数的阈值区间进行比较判定,输出相应的控制指令以供调节交流伺服电机11的转速和/或调节双向变量泵12的排量。
针对步骤S207中控制器16根据反馈的检测值与预设的各个参数的阈值区间进行比较判定而输出相应的控制指令,具体可分为如下诸多情形:
当第一、第二压力传感器141、143检测得到的压力值小于预设的压力阈值区间的下限值时,双向变量泵12处于大排量,根据Q=V*n(其中,Q为流量,V为排量,n为转速),此时液压缸13的流量随着交流伺服电机11的转速而改变,位移传感器151和速度传感器153分别将检测得到的位移值和速度值反馈给控制器16,控制器16根据位移传感器151检测得到的位移值以及速度传感器153检测得到的速度值而向交流伺服电机11输出控制指令以令交流伺服电机11调节转速,控制液压缸13的位移和速度落入预设的位移阈值区间内和速度阈值区间内;随着压力的升高,交流伺服电机11的转矩会增加,控制器16控制双向变量泵12减小排量,减小交流伺服电机11的输出转矩,避免交流伺服电机11长时间处于高负荷状态,延长交流伺服电机11的使用寿命;当压力达到预设的压力阈值区间时,所述无阀液压伺服系统处于保压状态,流量并不需要发生较大改变,由控制器16控制双向变量泵12减小排量,从而减小流量,减少能量消耗。
当负载2出现波动时,原本的平衡状态被打破,液压缸13会发生位移或速度的改变,位移传感器151和速度传感器153会分别实时检测得到液压缸13在位移或速度上的变化情况,控制器16根据位移传感器151检测得到的位移值以及速度传感器153检测得到的速度值而输出控制指令以控制交流伺服电机11调节转速或控制双向变量泵12调节排量,使无阀液压伺服系统回到平衡状态,稳定运行。由于负载2发生的波动相对而言较小,改变交流伺服电机11转速较为直接有效,能快速反应。
当负载2出现过载时,此时,所述无阀液压伺服系统内的压力会急剧上升,可以利用压力传感器141、143来进行过载保护。例如:当压力传感器141、143检测得到的压力值大大超过预设的压力阈值区间的上限值时,控制器16根据压力传感器141、143检测得到的压力值而控制交流伺服电机11迅速减小转速,直至液压缸13运动到安全位置;当位移传感器151检测得到的位移值大大超过预设的位移阈值区间的上限值或速度传感器153检测得到的速度值超过预设的速度阈值区间的上限值时,控制器16控制交流伺服电机11减小转速。
另外,对于某些特殊工况,更可编制控制程序,通过计算机给控制器16发出相应控制指令就可实现,如给控制器16发出小压力大流量的控制指令,能实现液压缸13的快速运动,可以满足如高速轻载,需要大流量和较小工作压力的情况;与之对应地,面对大负载时,则给控制器16发出小流量大压力的控制指令,能实现液压缸13的慢速运动,可以满足如低速重载,需要维持较大压力及补偿少量流量的情况。
下面对本发明一种无阀液压伺服系统及其控制方法的有益效果进行说明。
首先,采用交流伺服电机加双向变量泵的组合,可以实现交流伺服电机转速可变以及液压泵的排量可变,整个系统控制更加灵活,适用于各类情形,效率较高,同时能延长交流伺服电机和液压元件的使用寿命,能提高资源的利用率;
又,简化油路系统,对双向变量泵功率利用合理,可减少功率损耗,减少油液发热,解决了现有技术中元件故障率较高、能源浪费等问题;
又,压力传感器、位移传感器、以及速度传感器与控制器组成闭环控制回路,从而能精确控制液压缸的运动;
再,由液压锁和油箱组成的无动力补油装置,可以实现非对称液压缸的双向运动;
还有,可以最大程度地减少系统中管道的长度,减少沿程压力损失和因管道接口产生的泄漏问题。
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
无阀液压伺服系统及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0