








专利摘要
本发明公开了一种激光微织构加工方法,包括如下步骤:建立机床三维运动模型,将机床直线轴和旋转轴的实时位置转换为加工机床坐标;移动待加工工件至加工位置,将其设为加工原点,并更新机床坐标系;读取加工位置参数,计算获得激光加工位置坐标;根据坐标计算生成加工示意图,对加工效果进行模拟仿真;根据坐标生成G代码,用于加工中运动平台的路径规划;控制器根据G代码控制加工机床运动,将已获得的激光加工坐标与加工过程中实时读取的加工机床坐标相比较,当两者一致时,则认为工件运动到指定位置,从而控制激光器出光,进行激光微织构加工。本发明能够实现高精度加工,提高激光器与机床运动的控制同步性,有效改善激光微织构形貌观测难度。
权利要求
1.一种激光微织构加工方法,其特征在于:采用激光微织构加工机床,该机床包括上位机、控制器和直线轴X轴、直线轴Y轴、直线轴Z轴以及旋转轴;其中X轴、Y轴、旋转轴驱动连接工件加工工作台,工件加工工作台用于携带待加工的工件;激光头安装在Z轴上,用于控制激光头在工件加工工作台上方的升降以及激光调焦;上位机与控制器信号连接,所述控制器与所述X轴、Y轴、Z轴以及旋转轴信号连接;加工步骤如下:
1)、结合所述加工机床的结构建立机床三维运动模型,将机床运动伺服电机的角位移转化为机床直线轴的线位移和机床旋转轴的角位移,通过读取伺服电机角位移量,获取三向机床直线轴和旋转轴的实时位置数据,从而得到工件加工工作台的所在位置,生成加工机床坐标系;并获得加工工作点的加工机床坐标值;
2)、通过调节加工机床坐标来移动工件加工工作台,将位于工件加工工作台上的待加工工件移动到相应加工位置,加工指示灯辅助标记出加工工作点位置;以及调节加工机床Z轴的升降完成激光调焦,从而保障激光出光的焦点位于加工工件的表面;
3)、以此时加工机床的坐标为坐标原点,更新加工机床的坐标系;
4)、获取加工位置参数,生成激光加工位置坐标数据;
5)、以激光加工位置坐标数据生成用以控制四轴运动以及激光头的G代码;
6)、控制器读取并执行G代码以获取激光加工坐标并且控制四轴运动;并且读取实时加工机床的坐标,比较激光加工坐标与加工机床的坐标,当两者一致时,控制器发出指令驱使激光头出光进行激光微织构加工。
2.根据权利要求1所述的一种激光微织构加工方法,其特征在于:步骤1)中,所述X轴、Y轴、Z轴以及旋转轴分别由伺服电机驱动,读取伺服电机脉冲数生成机床直线轴和旋转轴的实时位置的加工机床坐标。
3.根据权利要求1所述的一种激光微织构加工方法,其特征在于:所述机床直线轴的线位移与伺服电机脉冲数之间的换算关系,如式(1)所示:
所述机床旋转轴的角位移与伺服电机脉冲数之间的换算关系,如式(2)所示:
其中,n为伺服电机需要获取的脉冲个数,x为机床直线轴线位移量,θ为机床旋转轴角位移量,p为滚珠丝杠螺距,k为伺服电机的电子齿轮比。
4.根据权利要求1所述的一种激光微织构加工方法,其特征在于:步骤4)中,所述加工位置参数包括加工行列数、行列间距以及激光功率、激光脉宽在内的激光器参数。
5.根据权利要求1所述的一种激光微织构加工方法,其特征在于:步骤4)中,上位机读取dxf图纸文件获取所述加工位置参数。
6.根据权利要求1所述的一种激光微织构加工方法,其特征在于:步骤4)还包括:根据激光加工位置坐标数据生成加工效果示意图,以对加工效果进行模拟仿真;针对激光打标功能需求,计算机通过解析已有dxf图纸文件,通过dxf文件数据接口,读取线、圆、弧、多义线不同线型的数据段,具体包括不同线型的起止点坐标、起止角度、圆心坐标、圆半径数据信息,根据图纸数据信息,计算得到激光加工轨迹坐标,绘制激光打标效果图。
7.根据权利要求1所述的一种激光微织构加工方法,其特征在于:步骤5)中,根据激光加工点坐标值或激光加工轨迹坐标,按照数控G代码编写习惯,融合数控G代码的直线插补、圆弧插补算法,一键生成G代码。
8.根据权利要求1所述的一种激光微织构加工方法,其特征在于:步骤6)中,控制器根据生成的G代码控制加工机床运动,将已获得的激光加工坐标与加工过程中实时读取的加工机床坐标相比较,当两者一致时,则认为工件运动到指定位置,从而控制激光器出光,进行激光微织构加工,实现加工机床和激光器联动控制。
说明书
技术领域
本发明涉及激光微织构加工技术、机床加工技术和自动控制技术领域,尤其是一种用于激光微织构加工方法。
背景技术
激光表面微织构是指通过激光对材料表面进行烧蚀气化,形成一定形状纹理的一种表面处理工艺,其在润滑、抗摩减磨、改变材料表面特性、提高材料力学性能等方面均有研究前景与应用价值。随着激光技术的不断发展,激光微织构研究正朝着精细化、复杂化、多元化方向发展,在不断提高激光微织构加工系统智能化水平的同时,也对激光微织构加工方法提出了更高要求。
当前激光微织构加工方法多依托已有数控机床系统的控制方案,然而传统的数控机床系统的控制方法往往封闭在系统框架内部,控制方法繁琐臃肿、开放性较低,无法满足新型设备的特殊需求,例如在搭载高性能激光器的多轴机床上,对多种形状工件进行激光微织构加工,就需要针对激光微织构加工需求,设计专用的加工方法。
当前,激光微织构加工方法仍存在以下缺点或不足:(1)机床运动精度较低,不能满足激光微织构加工的高精度要求;(2)基于已有数控机床系统的控制方法开放程度低、操作繁琐、机床运动G代码需要操作人员手动编写,上手效率低;(3)加工工艺选择匮乏、加工效果可视性差,无法满足多种工件形状不同织构形貌的加工要求,无法实时监测加工进程。(4)激光器与机床联动控制的协同性低,定位精度低,加工品质难以保障。
发明内容
本发明的目的在于提供一种激光微织构加工方法实现加工平台高精度运动,降低操作难度,简化操作复杂度,提高激光器与机床运动的控制同步性。
本发明的目的通过以下技术方案来实现:一种激光微织构加工方法,采用激光微织构的加工机床,该机床包括上位机、控制器和直线轴X轴、直线轴Y轴、直线轴Z轴以及旋转轴轴;其中X轴、Y轴、轴驱动连接工件加工工作台,工件加工工作台用于携带待加工的工件;激光头安装在Z轴上,用于控制激光头在工件加工工作台上方的升降以及激光调焦;上位机与控制器信号连接,所述控制器与所述X轴、Y轴、Z轴以及轴信号连接;加工步骤如下:
1)、结合所述加工机床的结构建立机床三维运动模型,将机床运动伺服电机的角位移转化为机床直线轴的线位移和机床旋转轴的角位移,通过读取电机角位移量,获取三向机床直线轴和旋转轴的实时位置数据,从而得到工件加工工作台的所在位置,生成加工机床坐标系;并获得加工工作点的加工机床坐标值;
2)、通过调节加工机床坐标来移动工件加工工作台,将位于工件加工工作台上的待加工工件移动到相应加工位置,加工指示灯辅助标记出加工工作点位置;以及调节加工机床Z轴的升降完成激光调焦,从而保障激光出光的焦点位于加工工件的表面;
3)、以此时加工机床的坐标为坐标原点,更新加工机床的坐标系;
4)、获取加工位置参数,生成激光加工位置坐标数据;
5)、以激光加工位置坐标数据生成用以控制四轴运动以及激光头的G代码;
6)、控制器读取并执行G代码以获取激光加工坐标并且控制四轴运动;并且读取实时加工机床的坐标,比较激光加工坐标与加工机床的坐标,当两者一致时,控制器发出指令驱使激光头出光进行激光微织构加工。
所述的一种激光微织构加工方法,其进一步设计在于:步骤1)中,所述X轴、Y轴、Z轴以及轴分别由伺服电机驱动,读取伺服电机脉冲数生成机床直线轴和旋转轴的实时位置加工机床坐标。
本发明的进一步改进在于:所述机床直线轴的线位移与机床运动伺服电机脉冲数之间的换算关系,如式(1)所示:
(1)
所述机床旋转轴的角位移与机床运动伺服电机脉冲数之间的换算关系,如式(2)所示:
(2)
其中,为伺服电机需要获取的脉冲个数,为机床直线轴的线位移量,为机床旋转轴的角位移量,为滚珠丝杠螺距,为伺服电机的电子齿轮比。上位机通过换算关系,将实际加工所需线位移量转换为机床运动伺服电机所能接收的脉冲量,以保障激光微织构加工精度,并将位置精度控制在微米级。
本发明的进一步改进在于:步骤4)中,所述加工位置参数包括加工行列数、行列间距以及激光功率、激光脉宽在内的激光器参数。
本发明的进一步改进在于:步骤4)中,上位机读取dxf图纸文件获取所述加工位置参数。
本发明的进一步改进在于:步骤4)还包括:根据激光加工位置坐标数据生成加工效果示意图,以对加工效果进行模拟仿真。便于操作人员在加工前期对加工效果进行观测预知,也便于操作人员对不恰当的工艺参数做出及时调整,其中,仿真效果根据加工工艺选择的不同和工艺参数的不同而产生变化,从而改善激光微织构加工工艺效果肉眼不易观测的问题。此外,针对激光打标功能需求,计算机通过解析已有dxf图纸文件,通过dxf文件数据接口,读取线、圆、弧、多义线不同线型的数据段,具体包括不同线型的起止点坐标、起止角度、圆心坐标、圆半径等数据信息,根据图纸数据信息,计算得到激光加工轨迹坐标,绘制激光打标效果图,便于操作人员在加工前期对激光打标效果进行观测预知。
本发明的进一步改进在于:步骤5)中根据激光加工点坐标值或激光加工轨迹坐标,按照数控G代码编写习惯,融合数控G代码的直线插补、圆弧插补算法,一键生成G代码,用于加工中运动平台的路径规划,以避免编写G代码的繁琐操作,也降低操作人员的入门难度。
本发明的进一步改进在于:步骤6)中,在激光微织构加工过程中,需要激光器的出光频率与工作台的运动速率保持协调统一,从而保障激光器配合工作台运动发射工作激光,在工件指定位置加工出微观形貌。因此,加工开始后,控制器根据生成的G代码控制加工机床运动,将已获得的激光加工坐标与加工过程中实时读取的加工机床坐标相比较,当两者一致时,则认为工件运动到指定位置,从而控制激光器出光,进行激光微织构加工,实现加工机床和激光器联动控制。
本发明的有益效果为:本发明通过建立机床三维运动模型,将机床轴实时位置转换为加工机床坐标,实现加工平台微米级精度运动;通过加工效果仿真,仿真模拟加工微观效果,达到改善激光表面织构形貌难以观测的问题;采用机床空间坐标位置控制激光器与工作台协调工作,相较传统的利用时间控制激光器工作的控制方法更为精确、直接,更能满足激光微织构加工的高精度、高可靠性的要求。本发明不仅能够实现加工平台微米级精度运动,而且能够自动生成G代码,简化操作,还能有效改善激光微织构形貌观测难度,提高激光器与机床运动的控制同步性。
因此,本发明可以提高激光微织构加工行业的工艺复杂度、工作效率和技术含量,在自动控制、激光微织构加工、机床加工等领域具有广泛应用前景。
附图说明:
图1为控制流程图。
图2为加工机床空间坐标系。
图3为加工工作流程图。
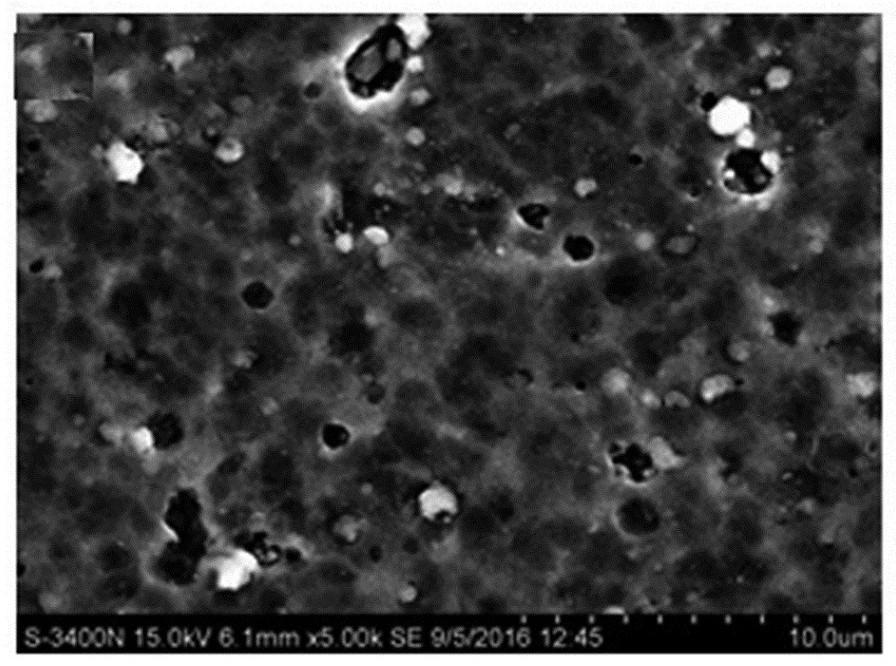
图4为方形点阵加工结果微观图。
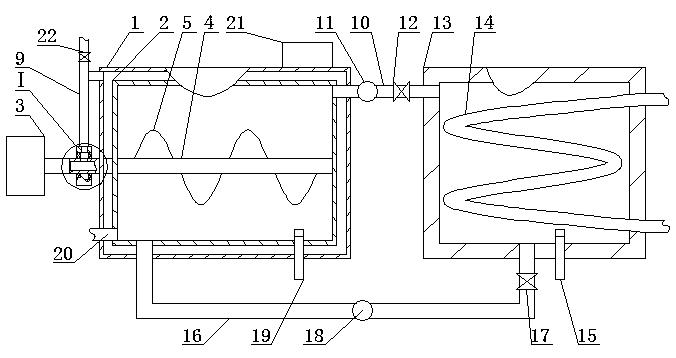
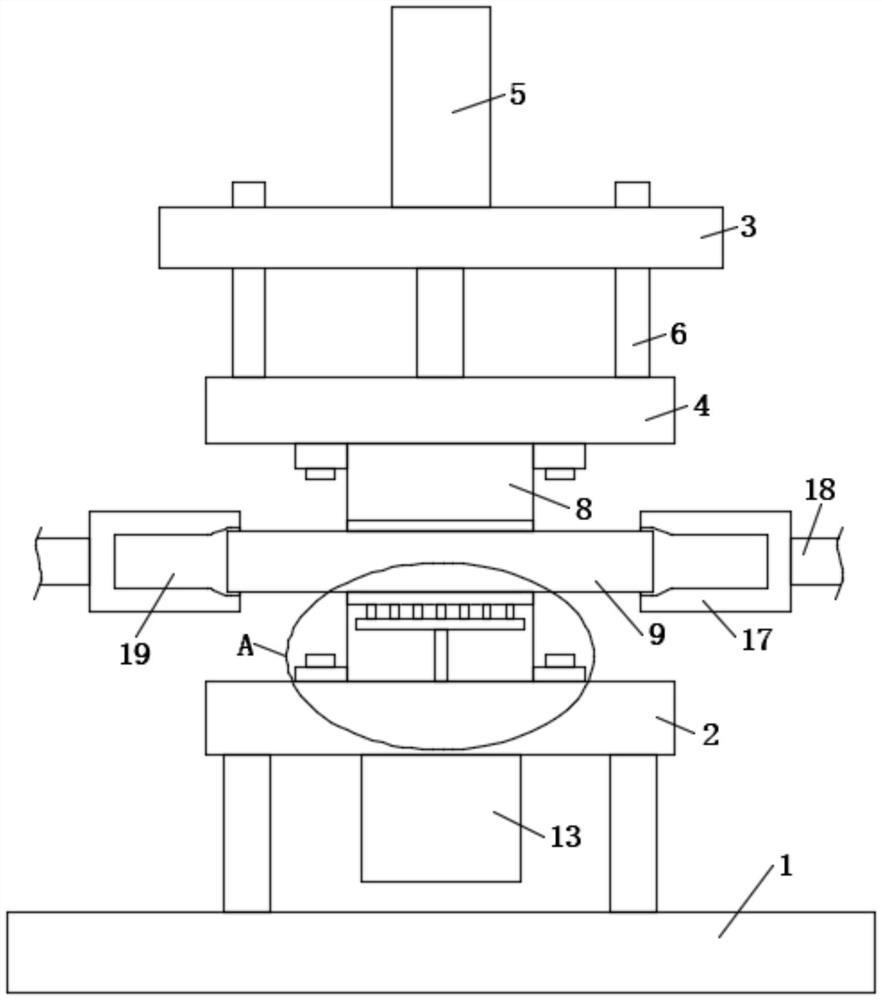
图5为激光微织构加工机床的工作结构图。
图中标号:1-上位机,2-控制器,3-工件加工工作台,4-待加工工件,5-激光头,6-伺服电机,7-加工工作点,8-位置传感器,9-激光器,10-光学系统。
具体实施方式:
为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。在本发明的一种实施方式中描述的元素和特征可以与一个或更多个其它实施方式中示出的元素和特征相结合。应当注意,为了清楚的目的,说明中省略了与本发明无关的、本领域普通技术人员已知的部件和处理的表示和描述。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,一种激光微织构加工方法,采用激光微织构加工机床,该机床包括上位机1、控制器2和X轴、Y轴、Z轴三向机床直线轴以及旋转轴轴;其中X轴、Y轴、轴驱动连接工件加工工作台3,工件加工工作台3用于携带待加工工件4;激光头5安装在Z轴上,用于控制激光头在工件加工工作台3上方的升降以及激光调焦;上位机1与控制器2信号连接,控制器2与X轴、Y轴、Z轴以及轴信号连接;包括以下步骤:结合加工机床的结构建立机床三维运动模型,将机床运动的伺服电机6的角位移转化为机床直线轴的线位移和机床旋转轴的角位移,通过读取电机角位移量,获取三向机床直线轴和旋转轴的实时位置数据,从而得到工件加工工作台3的所在位置,生成加工机床坐标系;并获得加工工作点7的加工机床坐标值;通过调节加工机床坐标来移动工件加工工作台3,将位于工件加工工作台3上的待加工工件4移动到相应加工位置,加工指示灯辅助标记出加工工作点位置;以及调节加工机床Z轴的升降完成激光调焦,从而保障激光出光的焦点位于待加工工件4的表面;以此时加工机床的坐标为坐标原点,更新加工机床的坐标系;获取加工位置参数,生成激光加工位置坐标数据;以激光加工位置坐标数据生成用以控制四轴运动以及激光头的G代码;控制器2读取并执行G代码以获取激光加工坐标并且控制四轴运动;并且读取实时加工机床的坐标,比较激光加工坐标与加工机床的坐标,当两者一致时,控制器2发出指令驱使激光头5出光进行激光微织构加工。
如图2所示,加工机床的三维空间具体构成为X、Y、Z三向机床直线轴以及位于XY工作台平面上的旋转轴。其中,激光微织构加工的激光头安装在Z向机床轴上,用于控制激光头升降以及激光调焦;X、Y、轴构成工件加工工作台,用于加工过程中加工工作点的位置移动。
如图3所示,开始工作后,首先进行系统初始化,检查控制器与PC端的通讯连接是否异常,如若异常,则提示检查通讯连接并尝试重连,直到通讯连接成功,接着上位机检查照明、指示灯等辅助设备工作情况,若检查无误则系统进入加工前期准备阶段,上位机将操作人员调整得到的工作激光器的聚焦位置,设为该四轴坐标的加工原点,对读取到的激光功率、激光脉宽等激光器参数进行数据处理,将参数信息写入激光器控制单元,根据不同加工工艺,读取相应行列、重复次数等加工工艺参数,生成加工仿真效果图,生成机床加G代码,开始加工,上位机通过控制器控制工作台运动,同时激光器配合同步出光,完成加工工作。上位机支持包括方形点阵加旋转点阵加工、旋转柱面加工、激光打标加工在内的四种工艺加工。
针对方形点阵加工,可以按照加工需求配置方形点阵加工的相关行列参数;针对旋转点阵加工,可以设置圆环加工的起始内环半径以及径向圆环间距和偏角参数;针对旋转柱面加工,可以将加工柱面视为长为圆周的方形平面,根据平面加工的参数要求进行工艺设置;针对激光加工,上位机支持读取*.dxf的CAD文件,将CAD图纸的坐标、线长、半径等参数进行识别与处理。
为了丰富加工可视化与便捷性,上位机提供加工效果预览窗口和一键生成G代码功能,在加工效果预览窗口中,操作人员可以通过上位机生成加工效果示意图,在加工开始前预览加工的最终效果;在一键生成G代码功能中,上位机将根据操作人员配置的工艺参数,融合直线插补、圆弧插补算法,为操作人员自动生成G代码,用于加工中运动平台的路径规划,以避免编写G代码的繁琐操作,也降低操作人员的入门难度。
如图4所示,应用本发明的激光微织构加工方法,在不锈钢SUS304表面完成了多组激光微织构加工。其中,IPG激光器调节激光功率为150W,脉冲宽度为2000μs,脉冲个数为5,不同进给速度,不同重复次数的参数配置下,进行50×10的方形点阵加工,并选用三维高分辨率共聚焦显微镜对实验材料表面微织构形貌进行观测,对不锈钢SUS304表面形貌分别进行5倍和20倍物镜放大观测,部分表面形貌图如图4所示。
如图5所示,为本发明所述的激光微织构加工机床的工作结构图,其中,控制器2通过接收、处理位置传感器8的反馈信号,并结合接收到的上位机1指令,输出运动控制信号给伺服电机6,控制工件加工工作台3运动,完成四轴机床联动控制;同时,控制器2根据上位机1加工指令,控制激光器9出光,完成方形点阵、旋转点阵、旋转柱面、激光打标多种工艺加工。
本发明针对激光微织构加工方法存在的运动精度低、操作繁琐、激光微织构形貌不易观测、激光器与机床联动控制协同性低等问题,本发明公开了一种激光微织构加工方法,不仅能够实现加工平台微米级精度运动,而且能够自动生成G代码,简化操作,还能有效改善激光微织构形貌观测难度,提高激光器与机床运动的控制同步性。
最后应说明的是:虽然以上已经详细说明了本发明及其优点,但是应当理解在不超出由所附的权利要求所限定的本发明的精神和范围的情况下可以进行各种改变、替代和变换。而且,本发明的范围不仅限于说明书所描述的过程、设备、手段、方法和步骤的具体实施例。本领域内的普通技术人员从本发明的公开内容将容易理解,根据本发明可以使用执行与在此所述的相应实施例基本相同的功能或者获得与其基本相同的结果的、现有和将来要被开发的过程、设备、手段、方法或者步骤。因此,所附的权利要求旨在在它们的范围内包括这样的过程、设备、手段、方法或者步骤。
一种激光微织构加工方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0