







专利摘要
本发明公开了一种关节机器人的行走机构,其通过设置内侧行走机构,而且,内侧行走机构具有第一行走模式和第二行走模式,第一行走模式和第二行走模式均为绕某一点或者某一中心区域在一定半径内转动行走,且第一行走模式下的所述转动行走半径小于第二行走模式下的转动行走半径,以便实现大小不同的转动半径的行走要求,这样,可实现不同转动半径的行走,以便根据不同的空间要求实现多角度的行走。
权利要求
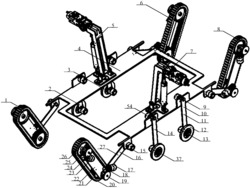
1.一种关节机器人的行走机构,其包括主体平台(6)、外侧行走机构和内侧行走机构,其中,所述主体平台的底部设置有所述内侧行走机构,所述外侧行走机构设置在所述主体平台的四周,且所述外侧行走机构绕设于所述内侧行走机构的四周,其特征在于,
所述内侧行走机构被构设为:具有第一行走模式和第二行走模式,所述第一行走模式和第二行走模式均为绕某一点或者某一中心区域在一定半径内转动行走,且所述第一行走模式下的所述转动行走半径小于第二行走模式下的转动行走半径,以便实现大小不同的转动半径的行走要求;且
所述内侧行走机构在所述第一行走模式和第二行走模式下行走时,所述外侧行走机构能够对所述主体平台提供辅助支撑和辅助导向;
所述外侧行走机构被构设为:具有第三行走模式和第四行走模式,所述第三行走模式为四个行走轮(11)滚动行走的模式,所述第四行走模式为其中两个行走轮滚动行走,另外两个行走轮从两侧构设为足式的摆动推动的模式;
所述外侧行走机构包括阵列设置在所述主体平台四周的第一行走机构(2)、第二行走机构(3)、第三行走机构(4)和第四行走机构(5),其中,所述第一行走机构与第三行走机构(4)相对布置,所述第二行走机构和第四行走机构相对布置,所述第一行走机构与所述第三行走机构结构相同,所述第二行走机构和第四行走机构结构相同;
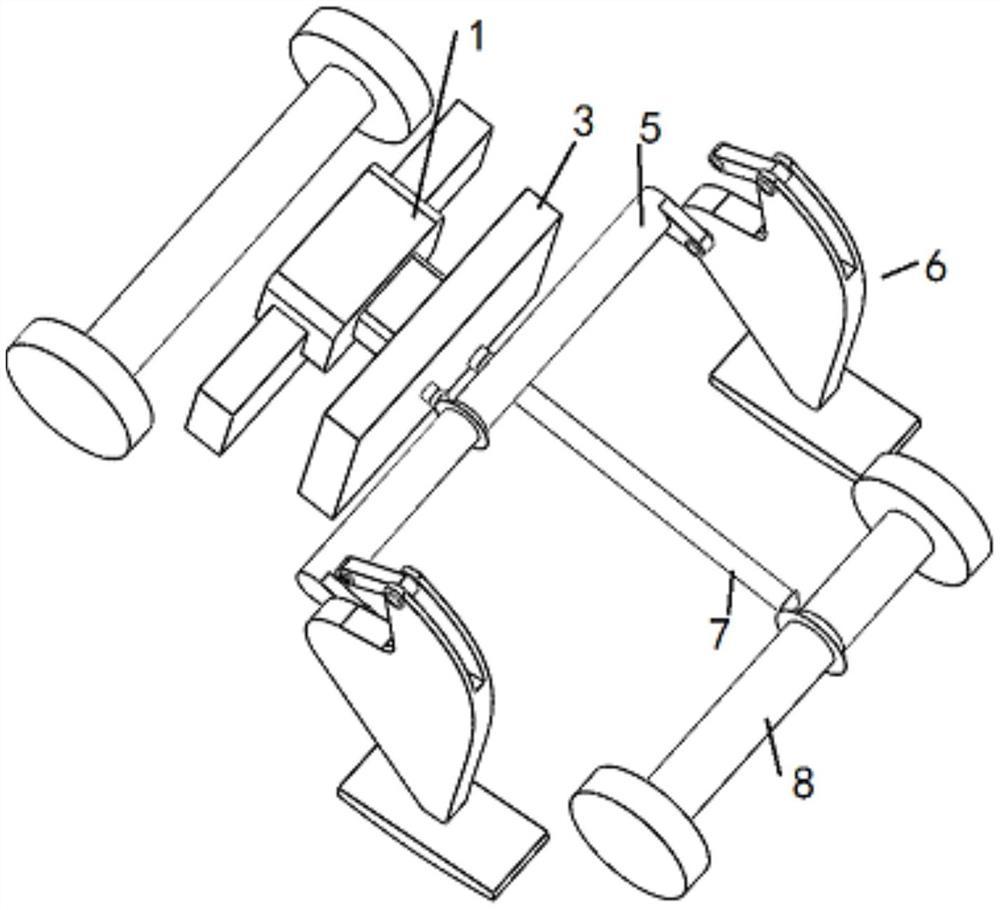
所述第二行走机构和第四行走机构包括水平伸缩调节器、行走轮转向控制器(7)、摆动驱动器(8)、高度调节器(9)、行走轮驱动总成(10)和行走轮(11),其中,所述水平伸缩调节器水平可伸缩的连接在所述主体平台上,所述水平伸缩调节器的端部固定设置有控制座,所述控制座上设置有行走轮转向控制器(7),所述行走轮转向控制器的输出端朝下且连接有所述高度调节器,所述高度调节器的底部固定设置有行走轮驱动总成,所述行走轮驱动总成的底部设置有由其驱动转动的所述行走轮(11),所述行走轮转向控制器能够驱动所述行走轮驱动总成绕所述高度调节器的中心轴线360°转动以便对所述行走轮的角度朝向进行控制,所述摆动驱动器位于所述控制座的一侧,且所述摆动驱动器用于驱动所述高度调节器(9)、行走轮驱动总成(10)和行走轮(11)绕所述水平伸缩调节器的中心水平轴线在一定角度范围内摆动;
所述第一行走机构和第三行走机构包括水平伸缩调节器、行走轮转向控制器(7)、高度调节器(9)、行走轮驱动总成(10)和行走轮(11),其中,所述水平伸缩调节器水平可伸缩的连接在所述主体平台上,所述水平伸缩调节器的端部固定设置有控制座,所述控制座上设置有行走轮转向控制器(7),所述行走轮转向控制器的输出端朝下且连接有所述高度调节器,所述高度调节器的底部固定设置有行走轮驱动总成,所述行走轮驱动总成的底部设置有由其驱动转动的所述行走轮(11),所述行走轮转向控制器能够驱动所述行走轮驱动总成绕所述高度调节器的中心轴线360°转动以便对所述行走轮的角度朝向进行控制;
所述内侧行走机构包括上连接盘(13)、下连接盘(14)、第一内侧行走轮(17)、第二内侧行走轮(18)、第三内侧行走轮(19)、锁止器(16)和内侧行走电机(15),其中,所述上连接盘的顶端采用升降控制器连接至所述主体平台的底部,以便由所述升降控制器控制所述内侧行走机构是否着陆进行行走,所述上连接盘的底部间隔且同轴连接有所述下连接盘,所述下连接盘与所述上连接盘之间的空间内圆周阵列设置有第一内侧行走轴、第二内侧行走轴和第三内侧行走轴,所述第一内侧行走轴的端部连接有第一内侧行走轮,所述第二内侧行走轴的端部连接有第二内侧行走轮,所述第三内侧行走轴的端部连接有所述第三内侧行走轮(19),所述第一内侧行走轴、第二内侧行走轴和第三内侧行走轴均由各自的所述内侧行走电机单独控制,且所述第一内侧行走轴、第二内侧行走轴和第三内侧行走轴与所述上连接盘或者下连接盘之间设置有锁止器,所述锁止器在锁止状态下能够将其对应的所述第一内侧行走轴、第二内侧行走轴或第三内侧行走轴进行锁止。
2.根据权利要求1所述一种关节机器人的行走机构,其特征在于:所述摆动驱动器的输出端连接有摆动驱动爪(12),所述摆动驱动爪的底端连接至所述高度调节器(9)与行走轮驱动总成(10)之间的位置。
3.根据权利要求1所述一种关节机器人的行走机构,其特征在于:所述第四行走模式下,所述摆动驱动器驱动所述高度调节器(9)、行走轮驱动总成(10)和行走轮(11)绕所述水平伸缩调节器的中心水平轴线在一定角度范围内摆动的同时,所述高度调节器同时自动进行相应的高度调节。
4.根据权利要求1所述一种关节机器人的行走机构,其特征在于:所述第三行走模式下,所述第一行走机构(2)、第二行走机构(3)、第三行走机构(4)和第四行走机构(5)的行走轮转向控制器(7)使得所述行走轮的朝向相同,且由各个所述行走轮驱动总成(10)同步驱动所述行走轮(11)滚动实现行走移动。
5.根据权利要求3所述一种关节机器人的行走机构,其特征在于:所述第一行走模式下,所述锁止器处于非锁止状态,以便使得第一内侧行走轮(17)、第二内侧行走轮(18)、第三内侧行走轮(19)同步转动;所述第二行走模式下,所述第一内侧行走轮(17)、第二内侧行走轮(18)、第三内侧行走轮(19)中的一个处于锁止状态下,另外两个同步转动。
6.根据权利要求5所述一种关节机器人的行走机构,其特征在于:所述第一内侧行走轮(17)、第二内侧行走轮(18)、第三内侧行走轮(19)结构相同,均包括轮体、凸体(20)和凹槽(21),所述轮体为并排设置的两个,且每个所述轮体的外周均圆周阵列设置有所述凸体和凹槽,所述凸体(20)和凹槽(21)一一间隔的布置。
一种关节机器人的行走机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0