









专利摘要
本发明公开了一种结构可调的三自由度并联机构,包括定平台、动平台与三个支链。每个支链均包括调节部件、立柱、移动副、转动副、连杆和球面副,其中调节部件由滑轨、滑块、镶条和螺钉组成。调节部件上的滑轨水平安装在定平台上,滑轨与滑块下部的滑槽配合,立柱垂直安装在滑块上,移动副与立柱连接,移动副的轴线与定平台上平面垂直,移动副与转动副连接,转动副的轴线与定平台的上平面平行,连杆的一端与转动副连接,连杆的另一端与球面副连接,球面副安装在动平台上。本发明通过滑轨与滑槽调节三个立柱的角度,可方便快速地调节连杆的布置形式,通过镶条与螺钉快速固定,便于安装,节省调整时间,提高效率。
权利要求
1.一种结构可调的三自由度并联机构,其特征在于:所述并联机构包括定平台(1)、动平台(2)、第一支链(3)、第二支链(4)和第三支链(5),
第一支链(3)、第二支链(4)和第三支链(5)中的每一个支链均包括以下部件:
第一调节部件(31,41,51)、第一立柱(32,42,52)、第一移动副(33,43,53)、第一转动副(34,44,54)、第一连杆(35,45,55)和第一球面副(36,46,56),
第一调节部件(31,41,51)由第一滑轨(311,411,511)、第一滑块(312,412,512)、第一镶条(313,413,513)和螺钉(314,414,514)组成,
上述每个支链中所包括的部件的连接结构为:第一滑轨(311,411,511)和第一镶条(313,413,513)安装在第一滑块(312,412,512)下部的滑槽之内,螺钉(314,414,514)安装在第一滑块(312,412,512)侧面的螺纹孔内,第一调节部件(31,41,51)上的第一滑轨(311,411,511)水平安装在定平台(1)上,第一滑轨(311,411,511)与第一滑块(312,412,512)下部的滑槽配合,第一立柱(32,42,52)垂直安装在第一滑块(312,412,512)上,第一滑块(312,412,512)上连接第一立柱(32,42,52),第一移动副(33,43,53)与第一立柱(32,42,52)连接,第一移动副(33,43,53)的轴线与定平台(1)上平面垂直,第一移动副(33,43,53)与第一转动副(34,44,54)连接,第一转动副(34,44,54)的轴线与定平台(1)的上平面平行,第一连杆(35,45,55)的一端与第一转动副(34,44,54)连接,第一连杆(35,45,55)的另一端与第一球面副(36,46,56)连接,第一球面副(36,46,56)安装在动平台(2)上,
三个滑轨(311,411,511)各自的对称轴线在定平台(1)上的投影相交于一点O,并且之间互为120°夹角,
三个滑轨(311,411,511)的截面均为梯形,梯形截面的内侧为斜边、外侧为直角边;三个滑块(312、412、512)下部的滑槽的截面均为梯形,梯形截面的内侧为斜边、外侧为直角边,
三个滑轨(311、411、511)均为圆弧形,圆弧形滑轨(311、411、511)的内侧为圆锥面、外侧为圆柱面,每个滑轨(311、411、511)内侧圆锥面的轴线与外侧圆柱面的轴线重合,三个滑轨(311、411、511)内侧面与外侧面的重合轴线在定平台(1)上的投影点分别为P1、P2、P3,三个投影点P1、P2、P3呈正三角形,P1、P2、P3确定的圆的圆心与三个滑轨(41、51、61)的对称轴线投影的交点O重合,
与三个滑轨(311、411、511)配合的三个滑块(312、412、512)下部的滑槽均为圆弧形,圆弧形滑槽的内侧为圆锥面、外侧为圆柱面,每个滑槽内侧圆锥面的轴线与外侧圆柱面的轴线重合。
2.根据权利要求1所述的结构可调的三自由度并联机构,其特征在于:每个支链中滑块(312、412、512)下部的滑槽的上平面和内侧圆锥面均为定位面;滑轨(311、411、511)的上平面和内侧圆锥面均为定位面,另一侧圆柱面通过圆弧形镶条(313、413、513)用螺钉(314、414、514)顶紧,将滑块(311、411、511)及立柱(32、42、52)固定。
3.根据权利要求2所述的结构可调的三自由度并联机构,其特征在于:滑块(312,412,512)下部的滑槽的梯形截面平行的两边中短边的长度大于滑轨(311,411,511)的梯形截面平行的两边中长边的长度。
4.根据权利要求3所述的结构可调的三自由度并联机构,其特征在于:三个滑块(312,412,512)上部均设置圆角矩形通孔,三个滑块(312、412、512)的一个侧面均设置了螺纹孔,螺纹孔轴线与滑槽的外圆柱面垂直。
说明书
技术领域
本发明涉及一种结构可调的三自由度并联机构,尤其是由一种由移动副、转动副和球面副构成的三自由度并联机构,属于机器人应用技术领域。
背景技术
并联机构也称并联机器人,是机器人的两大分支之一。与串联机器人相比,并联机器人具有刚度大、承载能力强、精度高等优点。在很多场合,并不需要具有六个自由度,机械结构与控制系统简单的少自由度机构就能很好地满足要求。其中,具有三个自由度的3-PRS(P为移动副,R为转动副,S为球面副)并联机构是最典型的代表之一,得到了国际工业界及学术界的广泛关注,并投入了大量的研究。3-PRS并联机构的一些特殊构型已在工业生产中得到了成功应用。
3-PRS并联机构代表了一类机构,包含三个相同的分支,并且每个分支都具有一个移动副、转动副与球面副。不同结构类型、不同结构尺寸下3-PRS并联机构的特性、性能等差异很大。为了进行充分研究,使其获得更加广泛的应用,常常需要针对不同的结构类型、不同的结构尺寸搭建机构硬件平台。专利《工作空间可调的三自由度并联机构及其调整方法》(申请号:201410618331.1)针对一种特定的机构类型(连杆布置形式),提供了一种工作空间可调的3-PRS并联机构,在这种特定的构型下可以调节结构尺寸,极大地方便了研究。专利《三自由度并联机构的可调运动平台及调节方法》(申请号:201510041594.5)提供的可调(运)动平台可以适用于不同的3-PRS并联机构类型(连杆布置形式),在构建3-PRS并联机构时(运)动平台不必重新设计制作。但是,当研究不同的3-PRS并联机构类型时,新的定平台、立柱等部分还需要重新构建,从而增加了实验硬件成本与时间成本。
发明内容
本发明针对一类3-PRS并联机构在研究不同结构类型的过程中,需要重新搭建新的定平台、立柱等的技术问题,提供了一种结构可调的3-PRS并联机构,通过调节三个立柱转过的角度,从而调节连杆的布置形式、形成不同的结构类型,有效地解决了上述技术问题。
本发明采取的技术方案是:
一种结构可调的三自由度并联机构,包括定平台1、动平台2、第一支链3、第二支链4和第三支链5,
所述第一支链3、第二支链4和第三支链5中的每一个支链均包括以下部件:
第一调节部件31,41,51、第一立柱32,42,52、第一移动副33,43,53、第一转动副34,44,54、第一连杆35,45,55和第一球面副36,46,56,
第一调节部件31,41,51由第一滑轨311,411,511、第一滑块312,412,512、第一镶条313,413,513和螺钉314,414,514组成,
上述每个支链中所包括的部件的连接结构为:第一滑轨311,411,511和第一镶条313,413,513安装在第一滑块312,412,512下部的滑槽之内,螺钉314,414,514安装在第一滑块312,412,512侧面的螺纹孔内,
第一调节部件31,41,51上的第一滑轨311,411,511水平安装在定平台1上,第一滑轨311,411,511与第一滑块312,412,512下部的滑槽配合,第一立柱32,42,52垂直安装在第一滑块312,412,512上,第一滑块312,412,512上连接第一立柱32,42,52,第一移动副33,43,53与第一立柱32,42,52连接、第一移动副33,43,53的轴线与定平台1上平面垂直,第一移动副33,43,53与第一转动副34,44,54连接,第一转动副34,44,54的轴线与定平台1的上平面平行,第一连杆35,45,55的一端与第一转动副34,44,54连接,第一连杆35,45,55的另一端与第一球面副36,46,56连接,第一球面副36,46,56安装在动平台2上,
三个滑轨311,411,511的各自对称轴线在定平台1上的投影相交于一点O,并且之间互为120°夹角,
三个滑轨311,411,511的截面均为梯形,梯形截面的内侧为斜边、外侧为直角边;三个滑块(312、412、512)下部的滑槽的截面均为梯形,梯形截面的内侧为斜边、外侧为直角边,
三个滑轨311,411,511均为圆弧形,圆弧形滑轨311,411,511的内侧为圆锥面、外侧为圆柱面,每个滑轨311,411,511内侧圆锥面的轴线与外侧圆柱面的轴线重合,三个滑轨311,411,511内侧面与外侧面的重合轴线在定平台1上的投影点分别为P1、P2、P3,三个投影点P1、P2、P3呈正三角形,P1、P2、P3确定的圆的圆心与三个滑轨41,51,61的对称轴线投影的交点O重合,
与三个滑轨311,411,511配合的三个滑块312,412,512下部的滑槽均为圆弧形,圆弧形滑槽的内侧为圆锥面、外侧为圆柱面,每个滑槽内侧圆锥面的轴线与外侧圆柱面的轴线重合。
进一步,每个支链中滑块312,412,512下部的滑槽的上平面和内侧圆锥面均为定位面;滑轨311,411,511的上平面和内侧圆锥面均为定位面,另一侧圆柱面通过圆弧形镶条313,413,513用螺钉314,414,514顶紧,将滑块311,411,511及立柱32,42,52固定。
更进一步,滑块312,412,512下部的滑槽的梯形截面平行的两边中短边的长度大于滑轨311,411,511的梯形截面平行的两边中长边的长度。
再进一步,三个滑块312,412,512上部均设置圆角矩形通孔,三个滑块312,412,512的一个侧面均设置了螺纹孔,螺纹孔轴线与滑槽的外圆柱面垂直。
本发明具有的有益的效果是:通过滑轨与滑槽调节三个立柱各自绕P1、P2、P2点所经过的垂直直线转过的角度,可方便快速地调节连杆的布置形式,通过镶条与螺钉快速固定,便于安装,节省调整时间,提高效率;滑块上设置了圆角矩形通孔,使三个立柱在定平台径向可调,可以满足不同尺寸的立柱、滑块、转动副的需要;可以根据研究的需要调整出大量的不同的构型,大大节省了机械硬件构建的成本。
附图说明
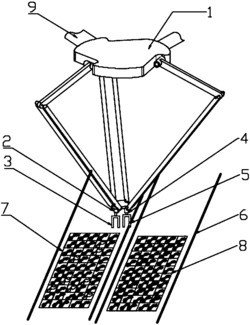
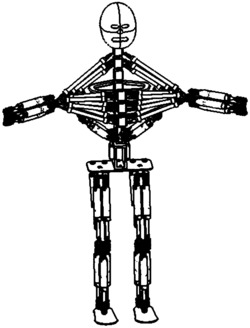
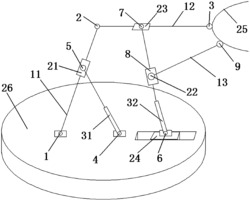
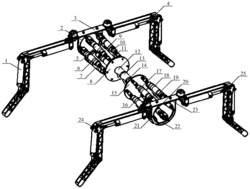
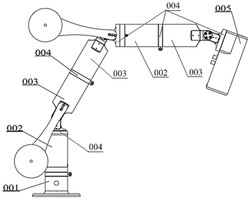
图1是本发明提供的机构装配简图;
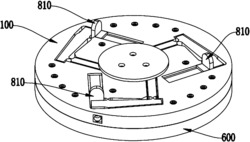
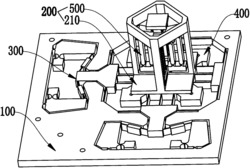
图2是本发明提供的定平台与滑轨装配后的俯视图;
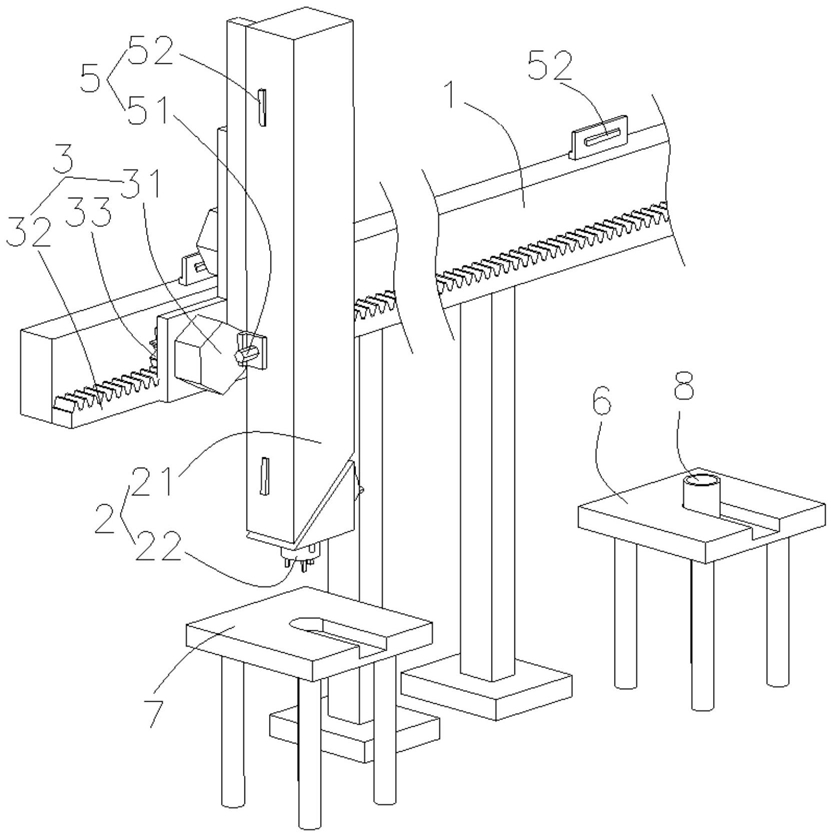
图3是本发明提供的调节部件与定平台、立柱等位置关系图;
图4是本发明提供的调节部件的轴测图;
图5是本发明提供的滑块的仰视图;
图6是本发明提供的滑块下部的滑槽与滑轨的截面形状图;
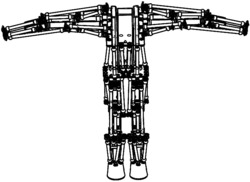
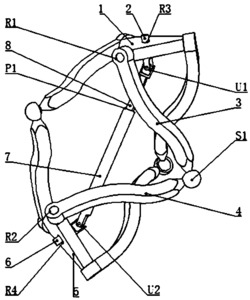
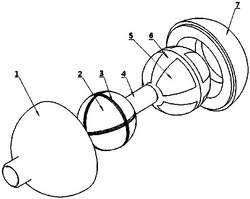
图7是本发明可调节成的一种结构构型简图;
图8是本发明可调节成与图7对应的一种结构构型俯视图;
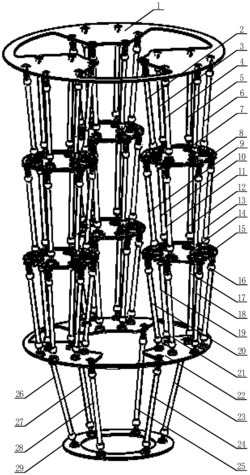
图9是本发明可调节成的一种结构构型简图;
图10是本发明可调节成与图9对应的一种结构构型俯视图;
图11是本发明可调节成的一种结构构型简图;
图12是本发明可调节成与图11对应的一种结构构型俯视图。
图中:1、定平台2、动平台
3、第一支链4、第二支链5、第三支链
31、第一调节部件41、第二调节部件51、第三调节部件
32、第一立柱42、第二立柱52、第三立柱
33、第一移动副43、第二移动副53、第三移动副
34、第一转动副44、第二转动副54、第三转动副
35、第一连杆45、第二连杆55、第三连杆
36、第一球面副46、第二球面副56、第三球面副
311、第一滑轨411、第二滑轨511、第三滑轨
312、第一滑块412、第二滑块512、第三滑块
313、第一镶条413、第二镶条513、第三镶条
314、螺钉414、螺钉514、螺钉。
具体实施方式
以下结合附图及较佳实施例,对依据本发明提供的具体实施方式、结构、特征及其功效,详细说明如后。
如图1~5所示,本发明提供的结构可调的三自由度并联机构包括定平台1、动平台2、第一支链3、第二支链4和第三支链5,其中:
1)第一支链3:包括第一调节部件31、第一立柱32、第一移动副33、第一转动副34、第一连杆35和第一球面副36;第一调节部件31由第一滑轨311、第一滑块312、第一镶条313和螺钉314组成;第一滑轨311和第一镶条313安装在第一滑块312下部的滑槽之内,螺钉314安装在第一滑块312侧面的螺纹孔内;第一调节部件31上的第一滑轨311水平安装在定平台1上,第一滑轨311与第一滑块312下部的滑槽配合,第一立柱32垂直安装在第一滑块312上,第一滑块312上连接第一立柱32,第一移动副33与第一立柱32连接,第一移动副33的轴线与定平台1上平面垂直,第一移动副33与第一转动副34连接,第一转动副34的轴线与定平台1的上平面平行,第一连杆35的一端与第一转动副34连接,第一连杆35的另一端与第一球面副36连接,第一球面副36安装在动平台2上。
2)第二支链4:包括二调节部件41、第二立柱42、第二移动副43、第二转动副44、第二连杆45和第二球面副46;第二调节部件41由第二滑轨411、第二滑块412、第二镶条413和螺钉414组成;第二滑轨411和第二镶条413安装在第二滑块412下部的滑槽之内,螺钉414安装在第二滑块412侧面的螺纹孔内;第二调节部件41上的第二滑轨411水平安装在定平台1上,第二滑轨411与第二滑块412下部的滑槽配合,第二立柱42垂直安装在第二滑块412上,第二滑块412上连接第二立柱42,第二移动副43与第二立柱42连接,第二移动副43的轴线与定平台1上平面垂直,第二移动副43与第二转动副44连接,第二转动副44的轴线与定平台1的上平面平行,第二连杆45的一端与第二转动副44连接,第二连杆45的另一端与第二球面副46连接,第二球面副46安装在动平台2上。
3)第三支链5:包括三调节部件51、第三立柱52、第三移动副53、第三转动副54、第三连杆55和第三球面副56;第三滑轨511和第三镶条513安装在第三滑块512下部的滑槽之内,螺钉514安装在第三滑块512侧面的螺纹孔内;第三调节部件51由第三滑轨511、第三滑块512、第三镶条513和螺钉514组成;第三调节部件51上的第三滑轨511水平安装在定平台1上,第三滑轨511与第三滑块512下部的滑槽配合,第三立柱52垂直安装在第三滑块512上,第三滑块512上连接第三立柱52,第三移动副53与第三立柱52连接,第三移动副53的轴线与定平台1上平面垂直,第三移动副53与第三转动副54连接,第三转动副54的轴线与定平台1的上平面平行,第三连杆55的一端与第三转动副54连接,第三连杆55的另一端与第三球面副56连接,第三球面副56安装在动平台2上。
三个滑轨41,51,61各自的对称轴线在定平台1上的投影相交于一点O,并且之间互为120°夹角,如图2中的直线OP1、OP2、OP3即为三个投影。
如图6所示,滑轨311、411、511的截面均为梯形,梯形截面的内侧为斜边、外侧为直角边;三个滑块(312、412、512)下部的滑槽的截面均为梯形,梯形截面的内侧为斜边、外侧为直角边。
如图2、图3、图4与图5所示,滑轨311、411、511均为圆弧形,圆弧形滑轨(311、411、511)的内侧为圆锥面、外侧为圆柱面,每个滑轨311、411、511内侧圆锥面的轴线与外侧圆柱面的轴线重合,三个滑轨311、411、511内侧面与外侧面的重合轴线在定平台1上的投影点分别为P1、P2、P3,三个投影点P1、P2、P3呈正三角形,P1、P2、P3确定的圆的圆心与三个滑轨41、51、61的对称轴线投影的交点O重合。图3中的Pi代表P1、P2、P3,即i=1、2、3。
如图5所示,与三个滑轨311、411、511配合的三个滑块312、412、512下部的滑槽均为圆弧形,圆弧形滑槽的内侧为圆锥面、外侧为圆柱面,每个滑槽内侧圆锥面的轴线与外侧圆柱面的轴线重合。
如图3所示,每个支链中滑块312、412、512下部的滑槽的上平面和内侧圆锥面均为定位面;滑轨311、411、511的上平面和内侧圆锥面均为定位面,另一侧圆柱面通过圆弧形镶条313、413、513用螺钉314、414、514顶紧,将滑块311、411、511及立柱32、42、52固定。
如图6所示,滑块312、412、512下部的滑槽的梯形截面平行的两边中短边的长度大于滑轨311、411、511的梯形截面平行的两边中长边的长度。图6中,将滑轨311、411、511的梯形截面和滑块312、412、512下部的滑槽的梯形截面的形状用同一个示意图表示,并不代表它们是尺寸相同。
如图4所示,滑块312、412、512的一个侧面均设置了螺纹孔,螺纹孔轴线与滑槽的外圆柱面垂直。在安装后,滑轨311、411、511的内圆锥面与滑块312、412、512的滑槽的内圆锥面配合作为一个定位面,滑轨311、411、511的上平面与滑块312、412、512下部的滑槽的上平面配合作为另一个定位面,镶条313、413、513的外圆柱面与滑槽的圆柱面相贴,镶条313、413、513的内圆柱面与滑块312、412、512的圆柱面相贴,螺钉314、414、514的轴线垂直于镶条313、413、513的圆柱面。实际上,上述的圆柱面与圆锥面不是完整的圆柱面与圆锥面,只是一部分。
滑轨311、411、511的圆弧可以是完整的整圆,也可是一部分圆弧;滑轨311、411、511可以是一个整体,也可是多个滑轨拼接而成;滑轨311、411、511可以通过螺钉等方式固定在定平台1上。图1、图2与图3中给出的定平台1的形状只是示意性的,定平台1可以是任意形状,并不一定是显式存在的平板结构,只要是能可靠安装、承载相关部件的结构即可。上述中的定平台1上平面可以是虚拟存在的,即实际起作用的等效平面。
如图4所示,三个滑块312、412、512上部均设置圆角矩形通孔,通过这些圆角矩形通孔,用螺栓将立柱32、42、52与滑块312、412、512固定在一起。在调节立柱32、42、52与滑块312、412、512的相对位置时,使每个转动副34、44、54的回转轴的中心点Qi(i=1,2,3)在定平台1上的投影与三个滑块312、412、512的弧形所在圆的圆心Pi(i=1,2,3)分别重合,即Q1与P1重合、Q2与P2重合、Q3与P3重合,如图3所示。
图2与图3的中,P1、P2、P3与相应的滑块312、412、512中心的连线与转动副34、44、54的回转中心垂直,根据这个特点调整滑块312、412、512在滑轨311、411、511上位置,即调整滑块312、412、512沿着P1、P2、P3旋转时转过的角度,然后插入镶条313、413、513,用螺钉314、414、514顶紧。
本发明提供的机构可调节成很多结构类型的3-PRS并联机构,图8、10、12给出了本发明提供的机构调节成的3种典型构型,对应的3-PRS并联机构的结构简图分别如图7、9、11所示。滑块312、412、512的位置如图8、10、12中的黑色矩形方块所示。其实,图1对应的构型即为图7和图8。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,本领域技术人员利用上述提示的技术内容做出的简单修改、等同变化或修饰,均落在本发明的保护范围内。
结构可调的三自由度并联机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0