









专利摘要
本发明公开了一种高速轻载机构非线性动态系统结构拓扑优化方法,其根据结构拓扑优化所需的最小迭代次数,对ESLM(equivalent?static?loads?method,等效静态载荷方法)中的线性静态结构优化迭代次数进行限制,以便限制优化中的修改量,降低等效载荷引起的模型误差,实现了基于结构有限修改ESLM的高速轻载机构拓扑优化。本发明将等效载荷考虑为设计变量的函数,重新构造优化模型,并提出了相应的求解方法,可以在满足优化条件下尽可能降低残余振幅,与标准等效静态载荷相比,相同运动条件下的振幅可以降低一半,大幅提升高速轻载机构的性能,满足高速轻载机构不同的设计需求。
权利要求
1.一种高速轻载机构非线性动态系统结构拓扑优化方法,其特征在于,包括以下步骤:
a.建立含有运动学自由度的非线性有限元模型;
b.任选机构运动过程中的某一位形作为静态机构进行拓扑优化设计;
c.分析b步骤所得拓扑优化设计结果,确定获得合适拓扑优化设计结果所需的最小迭代次数iters_min;
d.对a步骤中建立的非线性有限元模型进行非线性动力学分析,获得模型在各时间步上的刚度与位移信息;
e.根据d步骤获取的各时间步上的刚度与位移信息,计算获得多时间步上的等效静态载荷;
f.根据期望的结构优化模型,以e步骤获取的等效静态载荷集合作为优化模型参数进行步长搜索,将步长搜索次数iters传递至后续步骤进行优化循环控制;
g.比较f步骤中的步长搜索次数iters和c步骤中获得的最小迭代次数iters_min;若iters≥iters_min,则直接将f步骤中经iters步搜索后的新结构设计变量传递至后续步骤进行结构设计更新;若iters≤iters_min,则对f步骤优化过程进行收敛条件判定:满足收敛条件时则将f步骤中经iters次搜索获得的新结构设计变量传递至后续步骤进行结构设计更新,不满足收敛条件时则继续执行f步骤中的迭代循环和本步骤中的两次条件判定,直至所获得的结构设计变量可以被传递至后续步骤进行结构设计更新;
h.利用通过g步骤判定条件的新机构设计变量对非线性有限元模型进行更新设计,获得更新设计后的有限元模型;
i.对h步骤中获得有限元模型依次进行d-e步骤的操作,获得更新后的有限元模型多时间步上的等效静态载荷;
j.将步骤i中所述的新一轮计算与上一轮计算所获得的多时间步上的等效静态载荷的绝对差值之和与预设的收敛阈值进行比较;若小于预设阈值,则收敛条件满足,终止结构优化;否则,重复f-g-h-i步骤,直至满足本步骤中设定的收敛条件;
k.满足j步骤收敛条件判定的结构设计变量为最终机构设计变量,结构优化设计结束。
2.根据权利要求1所述的高速轻载机构非线性动态系统结构拓扑优化方法,其特征在于,步骤a中所述有限元模型为:
Findb∈Rn
tominimizef(b,z)
subjecttoK(b)z(s)-feq(b,s)=0;s=1,…,l
gj(b,z)≤0;j=1,…,m
0.0<bmin≤bi≤1.0;i=1,…,n
其中,b为设计变量向量,记号s表示在非线性分析时间步的序号,K(b)表示设计变量向量对应的刚度矩阵,z(s)为第s时间步处的节点位移向量,feq(b,s)表示第s时间步处的设计变量向量对应的等效静态载荷,gj(b,z)表示约束条件,l表示动态分析过程的离散时间步总数,m表示优化模型中的约束数量,n表示设计变量向量中的元素数量。
说明书
技术领域
本发明属于机械部件结构优化设计的技术领域,具体涉及一种高速轻载机构非线性动态系统结构拓扑优化方法。
背景技术
高速机构的精密运动主要涉及运动速度与运动精度两个指标。其中,对于高速机构而言,当运动加速度达到一定程度时,机构的动力学特性将会发生较大的变化,即机构呈现“柔性化”特性,进而导致这些工况下机构呈现高度的非线性,给机构的后续动力学分析及优化带来极大困难。
机构高速运动时,刚体运动与弹性振动互相耦合,可以考虑为柔性多体动力学模型:
式中,M,K,C,q分别表示质量矩阵、刚度矩阵、阻尼矩阵和载荷向量。下标r和f分别表示刚体(rigidbody)和弹性(flexiblebody)。
展开为刚体动力学:
展开为柔体动力学:
要提高系统的性能,需要对弹性体进行结构优化。
现有高速机构的设计结构优化方法有:
1)结构优化方法,主要是根据最大载荷设计各构件,不能考虑机构中各构件的相互影响,按照最大载荷优化的结构往往是保守的。
2)柔性多体动力学优化方法,能够考虑构件互相影响,采用的方法主要有逐点法和最危险工况法。其中,逐点法计算量非常庞大。最危险工况法试图用单点工况替代整体,降低计算量,但研究表明,危险工况并不总是发生在同一个地方。
3)等效静态载荷方法,是国外教授提出的比较简洁而行之有效的方法,将非线性分析在时间点上离散,获得各离散点的等效静态载荷,然后调用多工况线性静态优化,优化迭代收敛后再通过非线性分析更新等效载荷,直至惯性载荷不再发生变化。
现有最广泛使用的方法是等效静态载荷方法(注:原方法忽略了结构阻尼,与实际情况有偏差),原理如下:
构造位移等效平衡方程:
记为等效静态平衡方程:
Kffzf=feq(5)
其中,等效静态载荷:
在各个时间点上离散,消除了时间参数t,变成了一系列静态响应方程。
于是,优化流程如下:
(1)非线性动力学仿真;
(2)等效载荷计算;
(3)线性结构静力学优化;
该方法很简洁,实际是建立了非线性优化与线性静态优化的桥梁,已经在Hyperworks,LS-DYNA软件中实现,并广泛应用于汽车碰撞、机翼等结构的优化中取得非常好的效果。
上述方法主要缺点是:初始阶段,线性结构需要进行几十次的迭代,结构修改量非常大,优化结果已经偏离了实际工况,即便通过非线性分析进行等效静态载荷的更新,获取最优结构的优化路径发生了变化。对于一般工程应用,外载荷远大于惯性载荷的情形,结果相差不大。但是对于外载荷几乎为零的高速轻载机构,主要载荷是惯性载荷,与设计变量密切相关,载荷假设对高速轻载结构会产生较大的误差,无法满足对性能要求极高的微电子制造装备优化设计需求。
上述论述内容目的在于向读者介绍可能与下面将被描述和/或主张的本发明的各个方面相关的技术的各个方面,相信该论述内容有助于为读者提供背景信息,以有利于更好地理解本发明的各个方面,因此,应了解是以这个角度来阅读这些论述,而不是承认现有技术。
发明内容
本发明的目的在于避免现有技术中的不足而提供一种高速轻载机构非线性动态系统结构拓扑优化方法,解决现有方法在结构优化过程中忽略了惯性载荷的影响而不能适应于高速轻载机构的问题。
本发明的目的通过以下技术方案实现:
提供一种高速轻载机构非线性动态系统结构拓扑优化方法,包括以下步骤:
a.建立含有运动学自由度的非线性有限元模型;
b.任选机构运动过程中的某一位形作为静态机构进行拓扑优化设计;
c.分析b步骤所得拓扑优化设计结果,确定获得合适拓扑优化设计结果所需的最小迭代次数iters_min;
d.对a步骤中建立的非线性有限元模型进行非线性动力学分析,获得模型在各时间步上的刚度与位移信息;
e.根据d步骤获取的各时间步上的刚度与位移信息,计算获得多时间步上的等效静态载荷;
f.根据期望的结构优化模型,以e步骤获取的等效静态载荷集合作为优化模型参数进行步长搜索,将步长搜索次数iters传递至后续步骤进行优化循环控制;
g.比较f步骤中的步长搜索次数iters和c步骤中获得的最小迭代次数iters_min;若iters≥iters_min,则直接将f步骤中经iters步搜索后的新结构设计变量传递至后续步骤进行结构设计更新;若iters≤iters_min,则对f步骤优化过程进行收敛条件判定:满足收敛条件时则将f步骤中经iters次搜索获得的新结构设计变量传递至后续步骤进行结构设计更新,不满足收敛条件时则继续执行f步骤中的迭代循环和本步骤中的两次条件判定,直至所获得的结构设计变量可以被传递至后续步骤进行结构设计更新;
h.利用通过g步骤判定条件的新机构设计变量对非线性有限元模型进行更新设计,获得更新设计后的有限元模型;
i.对h步骤中获得有限元模型依次进行d-e步骤的操作,获得更新后的有限元模型多时间步上的等效静态载荷;
j.将步骤i中所述的新一轮计算与上一轮计算所获得的多时间步上的等效静态载荷的绝对差值之和与预设的收敛阈值进行比较;若小于预设阈值,则收敛条件满足,终止结构优化;否则,重复f-g-h-i步骤,直至满足本步骤中设定的收敛条件;
k.满足j步骤收敛条件判定的结构设计变量为最终机构设计变量,结构优化设计结束。
其中,步骤a中所述有限元模型为:
Findb∈Rn
tominimizef(b,z)
subjecttoK(b)z(s)-feq(b,s)=0;s=1,…,l
gj(b,z)≤0;j=1,…,m
0.0<bmin≤bi≤1.0;i=1,…,n
其中,b为设计变量向量,记号s表示在非线性分析时间步的序号,K(b)表示设计变量向量对应的刚度矩阵,z(s)为第s时间步处的节点位移向量,feq(b,s)表示第s时间步处的设计变量向量对应的等效静态载荷,gj(b,z)表示约束条件,l表示动态分析过程的离散时间步总数,m表示优化模型中的约束数量,n表示设计变量向量中的元素数量。
本发明的有益效果:本发明将等效载荷考虑为设计变量的函数,重新构造优化模型,并提出了相应的求解方法,可以在满足优化条件下尽可能降低残余振幅,与标准等效静态载荷相比,相同运动条件下的振幅可以降低一半,大幅提升高速轻载机构的性能,满足高速轻载机构不同的设计需求。
附图说明
利用附图对本发明作进一步说明,但附图中的实施例不构成对本发明的任何限制,对于本领域的普通技术人员,在不付出创造性劳动的前提下,还可以根据以下附图获得其它的附图。
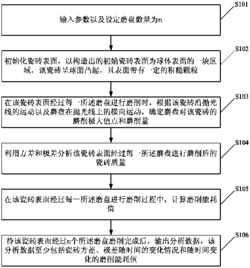
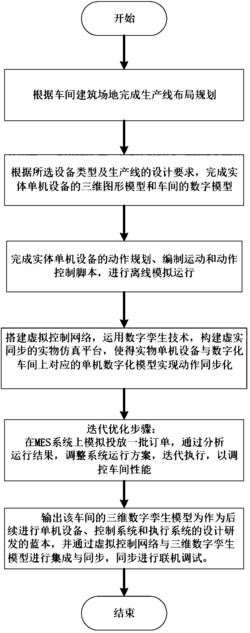
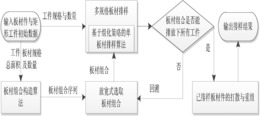
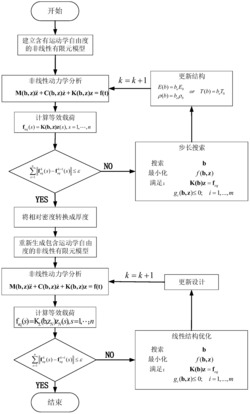
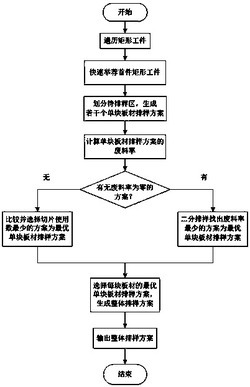
图1是高速轻载机构非线性动态系统结构拓扑优化方法的流程示意图。
具体实施方式
为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施例对本发明作进一步详细的描述,需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
本发明的核心在于提供一种高速轻载机构非线性动态系统结构拓扑优化方法,其根据结构拓扑优化所需的最小迭代次数,对ESLM中的线性静态结构优化迭代次数进行限制,以便限制优化中的修改量,降低等效载荷引起的模型误差,实现了基于结构有限修改ESLM的高速轻载机构拓扑优化。
由于拓扑优化方法中,需要在一定的载荷边界条件下,引入罚函数机制,使得设计变量往0或1变化。没有足够的迭代次数,不能产生拓扑结构。然而,迭代次数太多,结构修改量过大导致与载荷不变假设产生误差,从而使得性能变差。因此,本发明选择产生拓扑结构的最小迭代次数作为上限,对最大修改量进行限制,从而减小惯性载荷变化产生的误差。
结合图1所示,本发明所述的高速轻载机构非线性动态系统结构拓扑优化方法,实施步骤如下:
a.建立含有运动学自由度的非线性有限元模型;
b.任选机构运动过程中的某一位形作为静态机构进行拓扑优化设计;
c.分析b步骤所得拓扑优化设计结果,确定获得合适拓扑优化设计结果所需的最小迭代次数iters_min;
d.对a步骤中建立的非线性有限元模型进行非线性动力学分析,获得模型在各时间步上的刚度与位移信息;
e.根据d步骤获取的各时间步上的刚度与位移信息,计算获得多时间步上的等效静态载荷;
f.根据期望的结构优化模型,以e步骤获取的等效静态载荷集合作为优化模型参数进行步长搜索,将步长搜索次数iters传递至后续步骤进行优化循环控制;
g.比较f步骤中的步长搜索次数iters和c步骤中获得的最小迭代次数iters_min;若iters≥iters_min,则直接将f步骤中经iters步搜索后的新结构设计变量传递至后续步骤进行结构设计更新;若iters≤iters_min,则对f步骤优化过程进行收敛条件判定:满足收敛条件时则将f步骤中经iters次搜索获得的新结构设计变量传递至后续步骤进行结构设计更新,不满足收敛条件时则继续执行f步骤中的迭代循环和本步骤中的两次条件判定,直至所获得的结构设计变量可以被传递至后续步骤进行结构设计更新;
h.利用通过g步骤判定条件的新机构设计变量对非线性有限元模型进行更新设计,获得更新设计后的有限元模型;
i.对h步骤中获得有限元模型依次进行d-e步骤的操作,获得更新后的有限元模型多时间步上的等效静态载荷;
j.将步骤i中所述的新一轮计算与上一轮计算所获得的多时间步上的等效静态载荷的绝对差值之和与预设的收敛阈值进行比较;若小于预设阈值,则收敛条件满足,终止结构优化;否则,重复f-g-h-i步骤,直至满足本步骤中设定的收敛条件;
k.满足j步骤收敛条件判定的结构设计变量为最终机构设计变量,结构优化设计结束。
在电子封装等高速轻载机构中,外载荷几乎为零,主要载荷是惯性载荷。优化过程中惯性载荷不变的假设会产生很大的误差。因此,应该把等效载荷也看成设计变量的函数。优化模型变成:
Findb∈Rn
tominimizef(b,z)
subjecttoK(b)z(s)-feq(b,s)=0;s=1,…,l
gj(b,z)≤0;j=1,…,m
0.0<bmin≤bi≤1.0;i=1,…,n
其中b为设计变量向量,记号s表示在非线性分析时间步的序号,y(s)为第s时间步处的节点位移向量,feq(b,s)表示第s时间步处的设计变量向量对应的等效静态载荷,K(b)表示设计变量向量对应的刚度矩阵,gj(b,y)表示约束条件,l表示动态分析过程的离散时间步总数,m表示优化模型中的约束数量,n表示设计变量向量中的元素数量。在优化过程中,当设计变量发生变化时,结构刚度矩阵和等效静态载荷都发生变化,使得优化结果更加准确。
上面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,不能理解为对本发明保护范围的限制。
总之,本发明虽然例举了上述优选实施方式,但是应该说明,虽然本领域的技术人员可以进行各种变化和改型,除非这样的变化和改型偏离了本发明的范围,否则都应该包括在本发明的保护范围内。
高速轻载机构非线性动态系统结构拓扑优化方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0