






专利摘要
本发明公开了一种双摆臂式固晶机焊头机构及固晶机,为解决现有产品精度差、效率低等问题而设计。本发明双摆臂式固晶机焊头机构包括旋转运动驱动装置、第一摆臂、第二摆臂、第一直线运动驱动装置、第二直线运动驱动装置、第一吸嘴、以及第二吸嘴。本发明固晶机包括上述的双摆臂式固晶机焊头机构。本发明双摆臂式固晶机焊头机构控制更直接,精度更高,摆臂运动更平稳、更准确,保证高速工作时不会出现偏心运转的情况。本发明固晶机结构合理,取晶、固晶效果好且效率高,适用于各种半导体元件制造工作中。
权利要求
1.一种双摆臂式固晶机焊头机构,其特征在于,所述焊头机构包括旋转运动驱动装置、连接在所述旋转运动驱动装置驱动轴端部上的第一摆臂和第二摆臂、设置在第一摆臂端部的第一直线运动驱动装置、设置在第二摆臂端部的第二直线运动驱动装置、设置在第一直线运动驱动装置驱动轴端部上的第一吸嘴(3)、以及设置在第二直线运动驱动装置驱动轴端部上的第二吸嘴。
2.根据权利要求1所述的双摆臂式固晶机焊头机构,其特征在于,所述第一摆臂和第二摆臂为同一根摆臂本体(4)上的两段;所述摆臂本体(4)的中部设有连接孔,所述旋转运动驱动装置驱动轴端部安装在所述连接孔内。
3.根据权利要求2所述的双摆臂式固晶机焊头机构,其特征在于,所述摆臂本体为一字形柱体,所述摆臂本体以连接孔为中心呈对称结构。
4.根据权利要求2或3所述的双摆臂式固晶机焊头机构,其特征在于,所述摆臂本体的运动惯性主轴和摆臂主体的旋转中心重合。
5.根据权利要求1所述的双摆臂式固晶机焊头机构,其特征在于,所述旋转运动驱动装置为旋转电机(1)。
6.根据权利要求1所述的双摆臂式固晶机焊头机构,其特征在于,所述第一直线运动驱动装置和第二直线运动驱动装置都为直线伺服电机。
7.根据权利要求1所述的双摆臂式固晶机焊头机构,其特征在于,所述第一直线运动驱动装置和第二直线运动驱动装置内分别集成有位移传感器。
8.一种固晶机,其特征在于,所述固晶机包括如权利要求1至7任一所述的双摆臂式固晶机焊头机构。
说明书
技术领域
本发明涉及一种双摆臂式固晶机焊头机构及固晶机。
背景技术
固晶机焊头机构的主要功能是将已经切割分离的晶片从晶圆上吸起,传送并放置于对应的工作载体上进行固晶焊接。为实现以上功能,焊头机构需要精确、平稳地往返于取晶处和固晶处两个位置,完成拾取、传送、粘贴焊接晶片等动作。由于晶圆直径较大,这要求焊头机构传送晶片的行程较大,而焊头机构取晶和固晶的行程相对较短。
在公告号为CN202651079U、名称为“双摆臂式直驱固晶机”的中国专利中公开了一种双摆臂式固晶机。该专利中采用旋转电机带动摆臂连接板及安装座进行旋转运动,进而带动安装在安装座上的摆臂机构做旋转运动。音圈电机安装在靠近摆臂机构的安装座侧,可以带动摆臂机构沿旋转电机轴向做直线运动,进而带动固定在摆臂末端的吸嘴轴向运动。其采用的双摆臂结构可以在一个工作周期中完成两次取晶及固晶动作。
在该专利中,固晶机焊头机构的吸嘴部件和摆臂机构中的音圈电机是通过摆臂进行联接的。在吸嘴处摆臂为悬臂梁结构,导致实际工作时摆臂机构中的音圈电机必须驱动较重的摆臂才能带动吸嘴部件完成取晶和固晶的动作。特别是当摆臂的长度较长、重量较大时,吸嘴的上下运动精度将下降。且摆臂重量的增大会降低摆臂机构的固有频率,导致摆臂机构在高速工作时的动态响应特性变差,进而影响其高频工作特性,限制了其生产效率进一步提升的空间。
发明内容
本发明的一个目的是提出一种精度高的双摆臂式固晶机焊头机构。
本发明的另一个目的是提出一种摆臂运动平稳、准确的双摆臂式固晶机焊头机构。
本发明的再一个目的是提出一种精度高的固晶机。
为达此目的,一方面,本发明采用以下技术方案:
一种双摆臂式固晶机焊头机构,所述焊头机构包括旋转运动驱动装置、连接在所述旋转运动驱动装置驱动轴端部上的第一摆臂和第二摆臂、设置在第一摆臂端部的第一直线运动驱动装置、设置在第二摆臂端部的第二直线运动驱动装置、设置在第一直线运动驱动装置驱动轴端部上的第一吸嘴3、以及设置在第二直线运动驱动装置驱动轴端部上的第二吸嘴。
特别是,所述第一摆臂和第二摆臂为同一根摆臂本体4上的两段;所述摆臂本体4的中部设有连接孔,所述旋转运动驱动装置驱动轴端部安装在所述连接孔内。
特别是,所述摆臂本体为一字形柱体,所述摆臂本体以连接孔为中心呈对称结构。
特别是,所述摆臂本体的运动惯性主轴和摆臂主体的旋转中心重合。
特别是,所述旋转运动驱动装置为旋转电机1。
特别是,所述第一直线运动驱动装置和第二直线运动驱动装置都为直线伺服电机。
特别是,所述第一直线运动驱动装置和第二直线运动驱动装置内分别集成有位移传感器。
另一方面,本发明采用以下技术方案:
一种固晶机,所述固晶机包括上述的双摆臂式固晶机焊头机构。
本发明双摆臂式固晶机焊头机构中利用直线运动驱动装置驱动轴端部上的吸嘴,控制更直接,精度更高。双摆臂为同一根摆臂本体上的两段,摆臂本体的中间位置设连接孔用来连接旋转运动驱动装置驱动轴的端部,摆臂运动更平稳、更准确。摆臂本体的运动惯性主轴和摆臂主体的旋转中心重合,保证高速工作时不会出现偏心运转的情况。
本发明固晶机上安装有高性能的双摆臂式固晶机焊头机构,结构合理,取晶、固晶效果好且效率高。摆臂本体的运动惯性主轴和旋转电机的旋转中心同轴,确保了摆臂本体在高速工作时的动平衡特性,提高了摆臂本体旋转运动的精度。同时,固晶机焊头机构中采用直线伺服电机来直接连接吸嘴,确保了吸嘴做轴向直线运动时不受摆臂重量及长度的影响。所以,本发明固晶机的摆臂本体可以比通常的摆臂更长,扩大了固晶机的工作范围。
附图说明
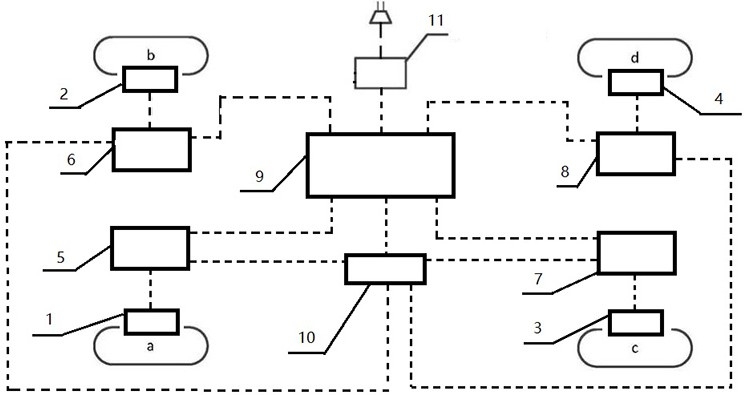
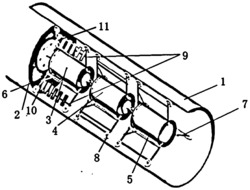
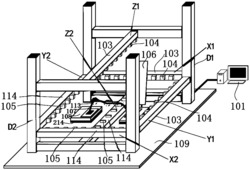
图1是本发明优选实施例一的结构示意图;
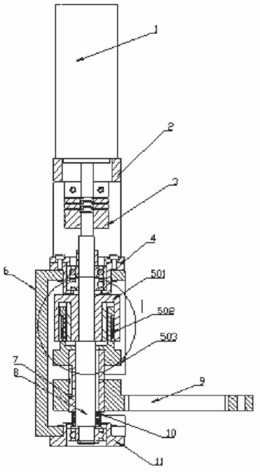
图2是图1所示优选实施例的爆炸结构示意图。
图中标记为:
1、旋转电机;2、第一直线伺服电机;3、第一吸嘴;4、摆臂本体。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
优选实施例一:
如图1和图2所示,本优选实施例提供一种双摆臂式固晶机焊头机构,该焊头机构包括旋转电机1、连接在旋转电机1端头的一根摆臂本体4、分别设置在摆臂本体4两端的第一直线伺服电机2和第二直线伺服电机(图中未示)、连接在第一直线伺服电机2末端的第一吸嘴3、以及连接在第二直线伺服电机末端的第二吸嘴(图中未示)。每个直线伺服电机内都集成有位移传感器。
摆臂本体4为一字形柱体。摆臂本体的中间位置设有用于连接旋转电机1的连接孔,即,摆臂本体以连接孔为中心呈对称结构。摆臂本体的运动惯性主轴和摆臂主体的旋转中心相重合。
工作流程:旋转电机1带动着摆臂本体4旋转,第一直线伺服电机2随之旋转至取晶工作位置。开启第一直线伺服电机2,驱动第一吸嘴3向下运动。在位移传感器的辅助下,第一直线伺服电机2驱动第一吸嘴3到达目标晶片并吸取目标晶片。完成取晶的工序后第一吸嘴3带着晶片一同升起。
同时,位于摆臂本体4另一端的第二直线伺服电机驱动第二吸嘴向下运动,在位移传感器的辅助下将吸附在第二吸嘴上的晶片放置在指定位置,完成固晶工作。然后第二直线伺服电机将第二吸嘴升起,为下一道工序做准备。
旋转电机1再次带动着摆臂本体4旋转,将第一直线伺服电机2、第一吸嘴3以及第一吸嘴3上吸附的晶片送到固晶工位。开启第一直线伺服电机2,驱动第一吸嘴3向下运动。第一吸嘴3完成固晶工序后再升起。
同时,位于摆臂本体4另一端的第二直线伺服电机驱动第二吸嘴向下运动,将指定的晶片吸附起来,完成取晶工作。然后第二直线伺服电机将第二吸嘴升起,准备将晶片送至指定的固晶工艺位置。
本优选实施例中双摆臂的设计使固晶机的生产效率可以大幅提高;固晶机焊头机构的高频工作特性变佳,可以进一步提高固晶机焊头机构的工作频率,也即进一步提高固晶机的生产效率;执行取晶和固晶操作的吸嘴部件的直线运动精度不受摆臂重量和长度的影响,从而提高固晶机的生产质量;固晶机焊头机构的摆臂长度可以更长,提高了固晶机的工作范围。
优选实施例二:
摆臂本体可以不是整根的结构,即,可分为第一摆臂和第二摆臂。第一摆臂和第二摆臂分别通过连接件设置在旋转运动驱动装置驱动轴端部。旋转运动驱动装置不限定为旋转电机,任何可以驱动摆臂旋转的装置均可。第一直线运动驱动装置和第二直线运动驱动装置也不限定为直线伺服电机,任何可以驱动吸嘴上下运动的装置均可。第一直线运动驱动装置和第二直线运动驱动装置内不限定必须集成有位移传感器,能保证直线运动驱动装置准确地直线移动的装置均可。
本优选实施例公开的双摆臂式固晶机焊头机构包括旋转运动驱动装置、连接在旋转运动驱动装置驱动轴端部上的第一摆臂和第二摆臂、设置在第一摆臂端部的第一直线运动驱动装置、设置在第二摆臂端部的第二直线运动驱动装置、设置在第一直线运动驱动装置驱动轴端部上的第一吸嘴、以及设置在第二直线运动驱动装置驱动轴端部上的第二吸嘴。
工作流程与优选实施例一相同。
本优选实施例中摆臂为两个独立的部件,易于维修、更换。
优选实施例三:
本优选实施例提供一种固晶机,该固晶机上安装有优选实施例一或优选实施例二所述的双摆臂式固晶机焊头机构。
双摆臂式固晶机焊头机构及固晶机专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0