








专利摘要
本实用新型提供一种屋面除雪机器人,涉及机器人领域,该屋面除雪机器人,包括壳体、摄像头、蓄电池、控制装置、触发装置、支撑脚和铲雪组件,壳体上开设有凹槽,壳体内开设有存储腔,触发装置位于凹槽内,所述蓄电池和控制装置均设在存储腔内,铲雪组件对称设在壳体的前后两侧。该屋面除雪机器人,通过微型空气泵抽气产生吸附效果,使得推杆一收缩时可拉动整个机器移动。达到前进或者后退的效果。同时机器在移动过程中,有雪铲与雪接触,进而将屋面的雪铲起,再通过电机带动雪铲翘起,铲雪的效果。由于本机器通过支撑脚和驱动轮移动,没有将其固定,机器活动范围广,进而扩大了铲雪范围,避免存在部分区域无法除雪的情况。
权利要求
1.一种屋面除雪机器人,其特征在于:包括壳体(1)、摄像头(2)、蓄电池(5)、控制装置(6)、触发装置(10)、支撑脚(8)和铲雪组件,壳体(1)上开设有凹槽(11),壳体(1)内开设有存储腔(12),触发装置(10)位于凹槽(11)内,所述蓄电池(5)和控制装置(6)均设在存储腔(12)内,铲雪组件对称设在壳体(1)的前后两侧,支撑脚(8)对称设在铲雪组件两侧,摄像头(2)安装在壳体(1)的前后两侧。
2.根据权利要求1所述的一种屋面除雪机器人,其特征在于:所述铲雪组件包括雪铲(3)、毛刷(31)和电机(4),雪铲(3)的上端与壳体(1)铰接,毛刷(31)设在雪铲(3)底部,电机(4)与壳体(1)相连,电机(4)的传动端与雪铲(3)的上端相连;所述雪铲(3)由纵向部和横向部组成,纵向部上端与电机(4)相连,纵向部下端与横向部相连,横向部底部与毛刷(31)相连。
3.根据权利要求1所述的一种屋面除雪机器人,其特征在于:所述支撑脚(8)包括推杆一(81)、推杆二(82)、微型空气泵(83)和中空的吸盘(84),推杆一(81)一端与壳体(1)铰接,推杆二(82)设在推杆一(81)上,推杆二(82)与壳体(1)铰接,推杆二(82)的活动端与推杆一(81)中部铰接,推杆一(81)的另一端与微型空气泵(83)相连,微型空气泵(83)下端竖直向下,微型空气泵(83)的下端与吸盘(84)相连。
4.根据权利要求1所述的一种屋面除雪机器人,其特征在于:所述触发装置(10)包括接雪杯(101)、弹簧(102)和报警器(103),接雪杯(101)位于凹槽(11)内,弹簧(102)设在接雪杯(101)下方,报警器(103)与凹槽(11)的内壁底部相连,报警器(103)位于弹簧(102)内。
5.根据权利要求1所述的一种屋面除雪机器人,其特征在于:所述壳体(1)的左右两侧分别铰接有驱动轮(7),壳体(1)相对于驱动轮(7)处连接有马达(9),马达(9)的传动端与驱动轮(7)相连。
说明书
技术领域
本实用新型涉及机器人技术领域,具体为一种屋面除雪机器人。
背景技术
在屋顶上沿屋顶平面铺设光伏板,用于光伏发电成为发展趋势。但厂房屋顶的承重能力是由一定限度的,在厂房屋顶设置光伏板不能超过其承重能力,但如遇到较大的降雪,光伏板装置的重量与积雪重量叠加,就会给厂房屋顶结构带来损坏的风险。
因此,在中国专利网中公开了“一种多滚刷屋顶光伏板除雪机器人”,专利号为201721678176.8。上述装置设有设有驱动系统和控制系统,利用驱动和控制扫雪滚刷的转动,将屋顶上的雪扫除。但上述的扫雪辊通过连杆等固定,导致扫雪辊的活动范围具有局限性,可能存在部分区域扫雪辊无法接触的情况,进而影响除雪效果。
实用新型内容
(一)解决的技术问题
针对现有技术的不足,本实用新型提供了一种屋面除雪机器人,解决了上述背景技术中一般的屋面除雪机器人活动范围有限,导致部分区域无法除雪的问题。
(二)技术方案
为实现以上目的,本实用新型通过以下技术方案予以实现:一种屋面除雪机器人,包括壳体、摄像头、蓄电池、控制装置、触发装置、支撑脚和铲雪组件,壳体上开设有凹槽,壳体内开设有存储腔,触发装置位于凹槽内,所述蓄电池和控制装置均设在存储腔内,铲雪组件对称设在壳体的前后两侧,支撑脚对称设在铲雪组件两侧,摄像头安装在壳体的前后两侧。
优选的,所述铲雪组件包括雪铲、毛刷和电机,雪铲的上端与壳体相连,毛刷设在雪铲底部,电机与壳体相连,电机的传动端与雪铲的上端铰接;所述雪铲由纵向部和横向部组成,纵向部上端与电机相连,纵向部下端与横向部相连,横向部底部与毛刷相连。
优选的,所述支撑脚包括推杆一、推杆二、微型空气泵和中空的吸盘,推杆一一端与壳体铰接,推杆二设在推杆一上,推杆二与壳体铰接,推杆二的活动端与推杆一中部铰接,推杆一的另一端与微型空气泵相连,微型空气泵下端竖直向下,微型空气泵的下端与吸盘相连。
优选的,所述触发装置包括接雪杯、弹簧和报警器,接雪杯位于凹槽内,弹簧设在接雪杯下方,报警器与凹槽的内壁底部相连,报警器位于弹簧内。
优选的,所述壳体的左右两侧分别铰接有驱动轮,壳体相对于驱动轮处连接有马达,马达的传动端与驱动轮相连。
(三)有益效果
本实用新型提供了一种屋面除雪机器人。具备以下有益效果:
1、该屋面除雪机器人,通过微型空气泵抽气产生吸附效果,使得推杆一收缩时可拉动整个机器移动。达到前进或者后退的效果。同时机器在移动过程中,有雪铲与雪接触,进而将屋面的雪铲起,再通过电机带动雪铲翘起,铲雪的效果。由于本机器通过支撑脚和驱动轮移动,没有将其固定,机器活动范围广,进而扩大了铲雪范围,避免存在部分区域无法除雪的情况。
附图说明
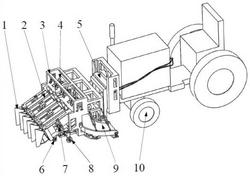
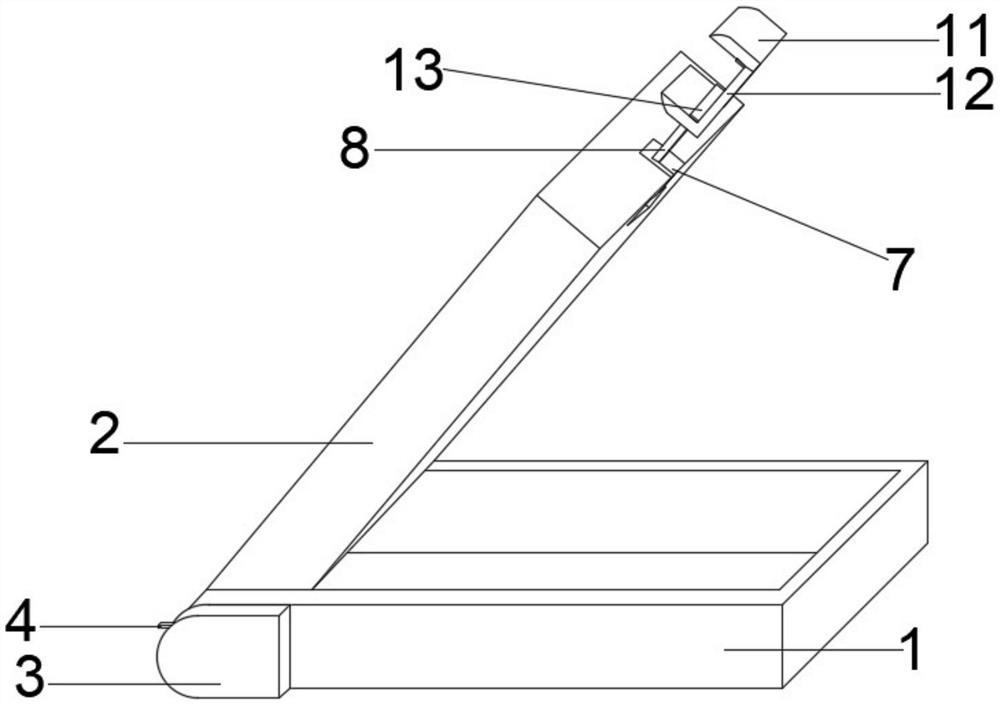
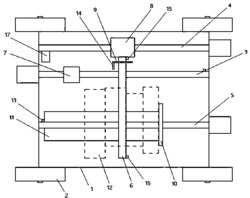
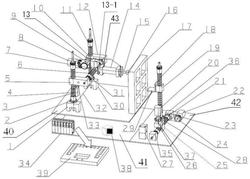
图1为本实用新型结构立体图;
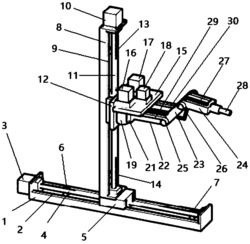
图2为本实用新型结构另一角度立体图;
图3为本实用新型结构局部剖视图。
图中:1壳体、11凹槽、12存储腔、2摄像头、3雪铲、31毛刷、4电机、5蓄电池、6控制装置、7驱动轮、71滑轮、8支撑脚、81推杆一、82推杆二、83微型空气泵、84吸盘、9马达、10触发装置、101接雪杯、102弹簧、103报警器。
具体实施方式
本实用新型实施例提供一种屋面除雪机器人,如图1-3所示,包括壳体1、摄像头2、蓄电池5、控制装置6、触发装置10、支撑脚8和铲雪组件。壳体1上开设有凹槽11。壳体1内开设有存储腔12。触发装置10位于凹槽11内。蓄电池5和控制装置6均与存储腔12的内壁底部粘接。铲雪组件对称设在壳体1的前后两侧,支撑脚8对称设在铲雪组件两侧,摄像头2固定安装在壳体1的前后两侧。利用蓄电池5为该机人工作提供动力。蓄电池5可定期更换。
通过摄像头2将拍摄的画面传递给人的电脑端上。通过远程遥控的方式利用控制装置6控制该机器人各零部件工作。控制装置内具有信号发生、接受模块和处理器等部件,控制装置是现有技术,故控制装置的具体结构、型号和电路布置均是常规技术手段,故不再详细描述。
铲雪组件包括雪铲3、毛刷31和电机4。雪铲3的上端与壳体1铰接,毛刷31固定粘接在雪铲3底部。电机4与壳体1固定粘接,电机4的传动端与雪铲3的上端焊接。雪铲3由纵向部和横向部组成,纵向部上端与电机4的传动端焊接。纵向部下端与横向部焊接,横向部底部与毛刷31固定粘接。利用电机4转动时,可带动雪铲3向上翻转。进而可将雪铲起。
支撑脚8包括推杆一81、推杆二82、微型空气泵83和中空的吸盘84。推杆一81一端与壳体1铰接,推杆二82设在推杆一81上,推杆二82与壳体1铰接,推杆二82的活动端与推杆一81中部铰接,推杆一81的另一端与微型空气泵83提供螺纹连接的方式,用螺钉将微信空气泵83固定在推杆一81上。微型空气泵83下端竖直向下,微型空气泵83的下端与吸盘84粘接。微型空气泵83的抽气口与吸盘84相通。
壳体1两侧的支撑脚可单独驱动。推杆二82的伸缩可控制推杆一81上下转动。通过推杆一81和推杆二82的配合使用,令微型空气泵83底部的吸盘84与屋面接触。当壳体1一侧的推杆二82伸长,令吸盘84与屋面接触后,该侧微型空气泵83抽气吸住屋面,壳体1另一侧微型空气泵83不工作,此时壳体工作侧的推杆一81伸缩,进而推动壳体1移动。
推杆是电推杆,推杆一81、推杆二82以及微型空气泵83与现有技术相同。故推杆一81、推杆二82以及微型空气泵83的具体结构、型号和电路布置均是常规技术手段。
该屋面除雪机器人,通过微型空气泵83抽气产生吸附效果,使得推杆一81收缩时可拉动整个机器移动。达到前进或者后退的效果。同时机器在移动过程中,有雪铲3与雪接触,进而将屋面的雪铲起,再通过电机4带动雪铲3翘起,铲雪的效果。由于本机器通过支撑脚和驱动轮7移动,没有将其固定,机器活动范围广,进而扩大了铲雪范围,避免存在部分区域无法除雪的情况。
触发装置10包括接雪杯101、弹簧102和报警器103。接雪杯101位于凹槽11内,弹簧102设在接雪杯101下方。弹簧102的上端与接雪杯101的底部焊接。弹簧102的下端与凹槽11的内壁底部焊接。报警器103与凹槽11的内壁底部固定粘接。报警器103位于弹簧102内。
接雪杯101用于接雪。在下雪过程中,接雪杯101内不断积累雪。重量不断增加,当达到预计值时,接雪杯101底部与报警器103接触。报警器103上有按压式开关,接雪杯101与报警器103接触后,触发按压式开关令报警器103报警。
壳体1的左右两侧分别铰接有驱动轮7,壳体1相对于驱动轮7处固定粘接有马达9,马达9的传动端与驱动轮7焊接。马达9可带动驱动轮7转动。驱动轮7呈六角形,每个角上均枢接有滑轮71。由于驱动轮7呈六角形,驱动轮可伸入雪中。便于驱动轮7在雪中移动。
推杆驱动轮7令机器可向侧边移动。当机器向侧边移动时,通过推杆二82将推杆一81抬升。当机器向侧边移动后,令推杆二82将推杆一81放下。由于重量的关系,雪铲3可伸入雪下。故向侧边移动时,并不会影响铲雪效果。
马达9、电机4可正反转是常规技术手段。具体型号、电路布置与现有技术相同。
工作原理:使用时,在下雪过程接雪杯101重量不断增加,下降后触发报警器103,人接受都通知后进行遥控。通过推杆一81、推杆二82的伸缩,令机器1向前移动。移动过程中,雪铲3将雪铲起。待移动到屋面边缘时,令电机4转动,将雪铲3翘起,将雪从屋面铲下。接着令电机4反转,雪铲3复位。推杆马达9带动驱动7滚动。使得机器向侧边移动。在重复上述操作,将雪铲掉。
综上所述,该屋面除雪机器人,通过微型空气泵83抽气产生吸附效果,使得推杆一81收缩时可拉动整个机器移动。达到前进或者后退的效果。同时机器在移动过程中,有雪铲3与雪接触,进而将屋面的雪铲起,再通过电机4带动雪铲3翘起,铲雪的效果。由于本机器通过支撑脚和驱动轮7移动,没有将其固定,机器活动范围广,进而扩大了铲雪范围,避免存在部分区域无法除雪的情况。
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
一种屋面除雪机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0