








专利摘要
本发明公开了一种可连续作业型智能榨汁设备及其工作方法,包括进料机构、搅碎机构以及控制机构,控制机构包括处理器、驱动装置以及存储装置;进料机构包括呈圆柱状的竖直筒壁、纵向缠绕于筒壁上的电动齿轮带以及设置于筒壁入口处的摄像装置,筒壁包括至少四组在水平方向并列的弧形玻璃片,弧形玻璃片的不同高度处内置有横向的中空通槽,通槽内设置有横向的橡胶棒,筒壁的外部设置有L型支架,L型支架的横杆设置为电液推杆,电液推杆的末端设置有与弧形玻璃片相连的吸盘套件,电动齿轮带上均匀设置有若干凸起的弯钩套件,摄像装置用于获取进入筒壁的食材的外观;搅碎机构设置于进料机构的正下方且包括传送装置、搅碎刀具以及出料装置。
权利要求
1.一种可连续作业型智能榨汁设备,包括进料机构、搅碎机构以及控制机构,其特征在于,所述控制机构包括处理器、驱动装置以及存储装置,所述处理器分别与所述驱动装置以及所述存储装置连接,所述存储装置用于存储所述处理器发送的数据;
所述进料机构包括呈圆柱状的竖直筒壁、纵向缠绕于所述筒壁上的电动齿轮带以及设置于所述筒壁入口处的摄像装置,所述筒壁包括电动桶盖,所述电动桶盖与所述驱动装置连接,用于控制所述进料机构的开闭,所述筒壁设置为分体式结构,其包括至少四组在水平方向并列的弧形玻璃片,所述弧形玻璃片的不同高度处内置有横向的中空通槽,所述通槽内设置有横向的橡胶棒,所述橡胶棒的末端封存于所述通槽内,所述橡胶棒内置有金属丝,所述筒壁的外部设置有L型支架,所述L型支架的横杆设置为电液推杆,所述电液推杆的末端设置有与所述弧形玻璃片相连的吸盘套件,所述电液推杆与所述驱动装置连接,用于配合所述橡胶棒调整所述筒壁的内径,所述电动齿轮带与所述弧形玻璃片建立一一对应的关系,所述电动齿轮带上均匀设置有若干凸起的弯钩套件,且各弧形玻璃片上的弯钩套件高度对应,所述弯钩套件在所述筒壁的内部呈向上弯起状态,其在所述筒壁的外部呈向下弯起状态,所述电动齿轮带与所述驱动装置连接,用于将食材在所述筒壁内传递,所述摄像装置与所述处理器连接,用于获取进入所述筒壁的食材的外观并将拍摄影像发送给所述处理器;
所述搅碎机构设置于所述进料机构的正下方且包括传送装置、搅碎刀具以及出料装置,所述传送装置与所述驱动装置连接,用于接收来自所述进料机构的食材并将其传送至所述搅碎机构的内部,所述搅碎刀具设置于所述搅碎机构的内部,所述出料装置设置于所述搅碎装置的底部,用于输出饮料。
2.根据权利要求1所述的一种可连续作业型智能榨汁设备,其特征在于:所述进料机构还包括若干尺寸的托盘,所述托盘的侧边设置有挂耳以及绑定装置,所述绑定装置内置有旋转模块,所述挂耳通过所述绑定装置与一个弯钩套件相连,所述绑定装置与所述驱动装置连接,用于固定所述托盘与所述电动齿轮带。
3.根据权利要求1所述的一种可连续作业型智能榨汁设备,其特征在于:所述出料装置包括圆台状防护圈,所述防护圈的内部设置有电动伸缩吸管,所述电动伸缩吸管与所述驱动装置连接。
4.根据权利要求1所述的一种可连续作业型智能榨汁设备,其特征在于:所述弯钩套件内置有旋转装置,所述旋转装置与所述驱动装置连接,用于向上或向下调整所述弯钩套件的弯折角度。
5.根据权利要求1所述的一种可连续作业型智能榨汁设备,其特征在于:所述进料机构还包括折叠型挡板,所述折叠型挡板与所述驱动装置连接,用于隔离所述进料机构与所述搅碎机构,所述折叠型挡板的顶部设置有激光测距仪,所述激光测距仪与所述处理器连接,用于检测所述折叠型挡板至其上方最近的食材的间距并将所述间距发送给所述处理器。
6.根据权利要求1-5任一项所述的一种可连续作业型智能榨汁设备的工作方法,其特征在于:包括以下工作步骤:
所述摄像装置获取进入所述筒壁的食材的外观并将拍摄影像发送给所述处理器;
所述处理器根据所述外观计算所述食材的尺寸,所述尺寸为所述食材的最小外接圆的半径;
所述处理器根据所述尺寸设定所述筒壁的内径以及对应的电液推杆的长度,所述尺寸加上预设距离等于所述筒壁的内径;
所述处理器向所述驱动装置输出伸长或缩短信号,所述驱动装置驱动所述电液推杆伸长或缩短至所述长度;
所述处理器向所述驱动装置输出第一传送信号,所述驱动装置驱动所述电动齿轮带带动食材向下传送;
所述处理器向所述驱动装置输出第二传送信号,所述驱动装置驱动所述传送装置将所述食材传送至搅碎刀具内;
所述处理器向所述驱动装置输出搅碎信号,所述驱动装置驱动所述搅碎刀具启动。
7.根据权利要求6所述的一种可连续作业型智能榨汁设备的工作方法,其特征在于:还包括:
若所述食材为零散形态时,将托盘通过挂耳挂在同一侧的弯钩套件上,所述处理器向所述驱动装置输出绑定信号,所述驱动装置驱动所述绑定装置启动;
当所述托盘移动至所述筒壁的最下端时,所述处理器向所述驱动装置输出解绑信号,所述驱动装置驱动所述托盘一侧的绑定装置解除对弯钩套件的绑定;
当所述托盘重新回到所述筒壁的最上端时,所述托盘另一侧的挂耳重新与所述弯钩套件连接,所述处理器向所述驱动装置输出绑定信号,所述绑定装置重新与所述弯钩套件绑定。
8.根据权利要求6所述的一种可连续作业型智能榨汁设备的工作方法,其特征在于:还包括:
当榨汁完毕后,用户将杯具放置于防护圈下方,所述处理器向所述驱动装置输出输水信号,所述驱动装置驱动电动伸缩吸管伸入所述杯具。
9.根据权利要求6所述的一种可连续作业型智能榨汁设备的工作方法,其特征在于:还包括:
若食材外观为不规则形状,通过旋转装置向上或向下调整所述弯钩套件的弯折角度。
10.根据权利要求6所述的一种可连续作业型智能榨汁设备的工作方法,其特征在于:还包括:
在榨汁之前,先将进料机构与搅拌机构隔离,所述处理器向所述驱动装置输出伸出信号,所述驱动装置驱动折叠型挡板向外侧伸出;
激光测距仪检测所述折叠型挡板至其上方食材的间距并将其发送给所述处理器;
所述处理器判断所述间距是否小于或等于预设间距;
若是,所述处理器向所述驱动装置输出暂停信号,所述驱动装置驱动所述电动齿轮带暂停传送,当榨汁完毕后再恢复。
说明书
技术领域
本发明涉及生活用品领域,特别涉及一种可连续作业型智能榨汁设备及其工作方法。
背景技术
随着生活水平的提高,现代人们已经不满足于直接食用水果或蔬菜,而是喜欢将水果或蔬菜榨成汁来食用,一来液体更适合婴幼儿食用,二来榨汁是可将多种水果或蔬菜混合呈口味更丰富的饮料,更易被年轻人接受。
但是在将水果与蔬菜混合时,一般家用的榨汁机内部空间有限,难以连续混合多种水果或蔬菜;对于商用的大容量的榨汁机,需要将水果或蔬菜从上方自由放入,这样水果或蔬菜之间会产生碰撞从而导致食材内部细胞发生破碎,加速食材变质,同时还有可能造成表皮破损,这就可能会被机器上附着的细菌侵入。
发明内容
发明目的:为了克服背景技术中存在的缺点,本发明实施例提供了一种可连续作业型智能榨汁设备及其工作方法,能够有效解决上述背景技术中涉及的问题。
技术方案:
一种可连续作业型智能榨汁设备,包括进料机构、搅碎机构以及控制机构,所述控制机构包括处理器、驱动装置以及存储装置,所述处理器分别与所述驱动装置以及所述存储装置,所述存储装置用于存储所述处理器发送的数据;
所述进料机构包括呈圆柱状的竖直筒壁、纵向缠绕于所述筒壁上的电动齿轮带以及设置于所述筒壁入口处的摄像装置,所述筒壁包括电动桶盖,所述电动桶盖与所述驱动装置连接,用于控制所述进料机构的开闭,所述筒壁设置为分体式结构,其包括至少四组在水平方向并列的弧形玻璃片,所述弧形玻璃片的不同高度处内置有横向的中空通槽,所述通槽内设置有横向的橡胶棒,所述橡胶棒的末端封存于所述通槽内,所述橡胶棒内置有金属丝,所述筒壁的外部设置有L型支架,所述L型支架的横杆设置为电液推杆,所述电液推杆的末端设置有与所述弧形玻璃片相连的吸盘套件,所述电液推杆与所述驱动装置连接,用于配合所述橡胶棒调整所述筒壁的内径,所述电动齿轮带与所述弧形玻璃片建立一一对应的关系,且其上均匀设置有若干凸起的弯钩套件,且各弧形玻璃片上的弯钩套件高度对应,所述弯钩套件在所述筒壁的内部呈向上弯起状态,其在所述筒壁的外部呈向下弯起状态,所述电动齿轮带与所述驱动装置连接,用于将食材在所述筒壁内传递,所述摄像装置与所述处理器连接,用于获取进入所述筒壁的食材的外观并将拍摄影像发送给所述处理器;
所述搅碎机构设置于所述进料机构的正下方且包括传送装置、搅碎刀具以及出料装置,所述传送装置与所述驱动装置连接,用于接收来自所述进料机构的食材并将其传送至所述搅碎机构的内部,所述搅碎刀具设置于所述搅碎机构的内部,所述出料装置设置于所述搅碎装置的底部,用于输出饮料。
作为本发明的一种优选方式,所述进料机构还包括若干尺寸的托盘,所述托盘的侧边设置有挂耳以及绑定装置,所述绑定装置内置有旋转模块,所述挂耳通过所述绑定装置与一个弯钩套件相连,所述绑定装置与所述驱动装置连接,用于固定所述托盘与所述电动齿轮带。
作为本发明的一种优选方式,所述出料装置包括圆台状防护圈,所述防护圈的内部设置有电动伸缩吸管,所述电动伸缩吸管与所述驱动装置连接。
作为本发明的一种优选方式,所述弯钩套件内置有旋转装置,所述旋转装置与所述驱动装置连接,用于向上或向下调整所述弯钩套件的弯折角度。
作为本发明的一种优选方式,所述进料机构还包括折叠型挡板,所述折叠型挡板与所述驱动装置连接,用于隔离所述进料机构与所述搅碎机构,所述折叠型挡板的顶部设置有激光测距仪,所述激光测距仪与所述处理器连接,用于检测所述折叠型挡板至其上方最近的食材的间距并将所述间距发送给所述处理器。
一种可连续作业型智能榨汁设备的工作方法,包括以下工作步骤:
所述摄像装置获取进入所述筒壁的食材的外观并将拍摄影像发送给所述处理器;
所述处理器根据所述外观计算所述食材的尺寸,所述尺寸为所述食材的最小外接圆的半径;
所述处理器根据所述尺寸设定所述筒壁的内径以及对应的电液推杆的长度,所述尺寸加上预设距离等于所述筒壁的内径;
所述处理器向所述驱动装置输出伸长或缩短信号,所述驱动装置驱动所述电液推杆伸长或缩短至所述长度;
所述处理器向所述驱动装置输出第一传送信号,所述驱动装置驱动所述电动齿轮带带动食材向下传送;
所述处理器向所述驱动装置输出第二传送信号,所述驱动装置驱动所述传送装置将所述食材传送至搅碎刀具内;
所述处理器向所述驱动装置输出搅碎信号,所述驱动装置驱动所述搅碎刀具启动。
作为本发明的一种优选方式,还包括:
若所述食材为零散形态时,将托盘通过挂耳挂在同一侧的弯钩套件上,所述处理器向所述驱动装置输出绑定信号,所述驱动装置驱动所述绑定装置启动;
当所述托盘移动至所述筒壁的最下端时,所述处理器向所述驱动装置输出解绑信号,所述驱动装置驱动所述托盘一侧的绑定装置解除对弯钩套件的绑定;
当所述托盘重新回到所述筒壁的最上端时,所述托盘另一侧的挂耳重新与所述弯钩套件连接,所述处理器向所述驱动装置输出绑定信号,所述绑定装置重新与所述弯钩套件绑定。
作为本发明的一种优选方式,还包括:
当榨汁完毕后,用户将杯具放置于防护圈下方,所述处理器向所述驱动装置输出输水信号,所述驱动装置驱动电动伸缩吸管伸入所述杯具。
作为本发明的一种优选方式,还包括:
若食材外观为不规则形状,通过旋转装置向上或向下调整所述弯钩套件的弯折角度。
作为本发明的一种优选方式,还包括:
在榨汁之前,先将进料机构与搅拌机构隔离,所述处理器向所述驱动装置输出伸出信号,所述驱动装置驱动折叠型挡板向外侧伸出;
激光测距仪检测所述折叠型挡板至其上方食材的间距并将其发送给所述处理器;
所述处理器判断所述间距是否小于或等于预设间距;
若是,所述处理器向所述驱动装置输出暂停信号,所述驱动装置驱动所述电动齿轮带暂停传送,当榨汁完毕后再恢复。
本发明实现以下有益效果:
1、通过增设进料机构来优化向搅碎结构内添加食材的过程;在向榨汁设备中添加食材时,将食材从进料机构的顶部放入,电动齿轮带将自动按照榨汁机构的工作进程调整食材传送的效率,同事通过间隔的弯钩套件可避免食材之间相互挤压破损,能够保证食材的完好。
2、进料机构的主体设置为筒壁,所述筒壁有四组弧形玻璃片组成,所述弧形玻璃片的内部设置有若干组在水平方向平行的中空通槽,所述中空通槽内置有橡胶棒,所述弧形玻璃片的背面设置有L型支架,所述L型支架的横杆设置为电液推杆,通过所述电液推杆与所述橡胶棒可将所述弧形玻璃片向外侧移动,从而达到增加筒壁内径的目的,能够使得不同尺寸的食材通过。
3、所述弧形玻璃片上纵向缠绕有电齿轮带,所述电动齿轮带可将放入进料机构的食材向下方传送,也可将多余的食材重新向上方传送,所述电动齿轮带上设置有若干弯钩套件,所述弯钩套件内置有旋转装置,当食材表面存在凹陷时,通过所述旋转装置调整所述弯钩套件的角度,使得所述弯钩条件能够完全贴合于食材的凹陷处。
4、设置有若干托盘,所述托盘可与所述弯钩套件自由结合或分离,当所述托盘与所述弯钩套件结合时,可用于传送零散状的食材。
5、在进料机构与搅碎机构之间设置有折叠型挡板,当所述搅碎机构工作时,启动所述折叠型挡板,可避免进料机构被汁液污染。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并于说明书一起用于解释本公开的原理。
图1为本发明提供的榨汁设备结构示意图。
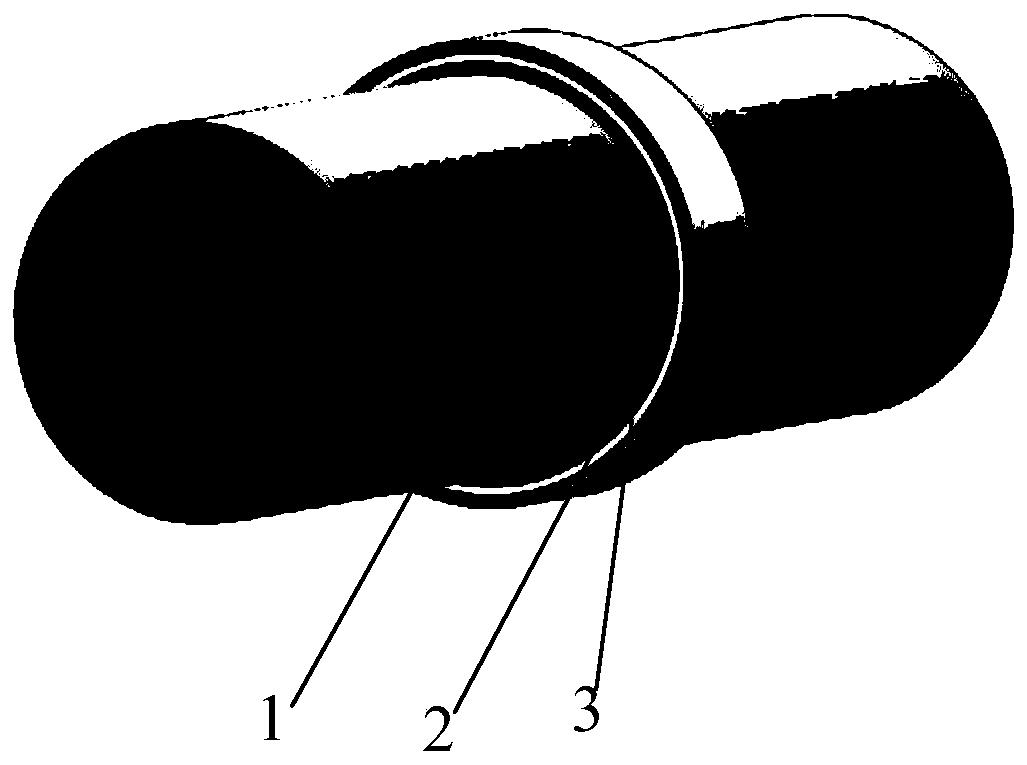
图2为本发明提供的筒壁结构示意图。
图3为本发明提供的托盘使用示意图。
图4为本发明提供的折叠型挡板结构示意图。
图5为本发明提供的出料装置结构示意图。
图6为本发明提供的处理器连接示意图。
图7为本发明提供的一种可连续作业型智能榨汁设备工作方法流程图。
图8为本发明提供的托盘使用方法流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
实施例一
如图1-6所示,本实施例提供一种可连续作业型智能榨汁设备包括进料机构、搅碎机构以及控制机构,其特征在于,所述控制机构包括处理器1、驱动装置2以及存储装置3,所述处理器1分别与所述驱动装置2以及所述存储装置3,所述存储装置3用于存储所述处理器1发送的数据。
所述进料机构包括呈圆柱状的竖直筒壁、纵向缠绕于所述筒壁上的电动齿轮带4以及设置于所述筒壁入口处的摄像装置5,所述筒壁包括电动桶盖,所述电动桶盖与所述驱动装置2连接,用于控制所述进料机构的开闭,所述筒壁设置为分体式结构,其包括至少四组在水平方向并列的弧形玻璃片6,所述弧形玻璃片6的不同高度处内置有横向的中空通槽7,所述通槽7内设置有横向的橡胶棒8,所述橡胶棒8的末端封存于所述通槽7内,所述橡胶棒8内置有金属丝,所述筒壁的外部设置有L型支架9,所述L型支架9的横杆设置为电液推杆10,所述电液推杆10的末端设置有与所述弧形玻璃片6相连的吸盘套件11,所述电液推杆10与所述驱动装置2连接,用于配合所述橡胶棒8调整所述筒壁的内径,所述电动齿轮带4与所述弧形玻璃片6建立一一对应的关系,且其上均匀设置有若干凸起的弯钩套件12,且各弧形玻璃片6上的弯钩套件12高度对应,所述弯钩套件12在所述筒壁的内部呈向上弯起状态,其在所述筒壁的外部呈向下弯起状态,所述电动齿轮带4与所述驱动装置2连接,用于将食材在所述筒壁内传递,所述摄像装置5与所述处理器1连接,用于获取进入所述筒壁的食材的外观并将拍摄影像发送给所述处理器1。
所述搅碎机构设置于所述进料机构的正下方且包括传送装置13、搅碎刀具14以及出料装置15,所述传送装置13与所述驱动装置2连接,用于接收来自所述进料机构的食材并将其传送至所述搅碎机构的内部,所述搅碎刀具14设置于所述搅碎机构的内部,所述出料装置15设置于所述搅碎装置的底部,用于输出饮料。
所述进料机构还包括若干尺寸的托盘16,所述托盘16的侧边设置有挂耳17以及绑定装置,所述绑定装置内置有旋转模块,所述挂耳17通过所述绑定装置与一个弯钩套件12相连,所述绑定装置与所述驱动装置2连接,用于固定所述托盘16与所述电动齿轮带4。
所述出料装置15包括圆台状防护圈19,所述防护圈19的内部设置有电动伸缩吸管20,所述电动伸缩吸管20与所述驱动装置2连接。
所述弯钩套件12内置有旋转装置21,所述旋转装置21与所述驱动装置2连接,用于向上或向下调整所述弯钩套件12的弯折角度。
所述进料机构还包括折叠型挡板22,所述折叠型挡板22与所述驱动装置2连接,用于隔离所述进料机构与所述搅碎机构,所述折叠型挡板22的顶部设置有激光测距仪21,所述激光测距仪21与所述处理器1连接,用于检测所述折叠型挡板22至其上方最近的食材的间距并将所述间距发送给所述处理器1。
具体地,本实施例提供一种可连续作业型智能榨汁设备包括进料机构、搅碎机构以及控制机构,所述控制机构包括处理器1、驱动装置2以及存储装置3,进料机构包括筒壁、电动齿轮带4、摄像装置5、L型支架9、托盘16、折叠型挡板22以及激光测距仪21,筒壁包括电动桶盖以及弧形玻璃片6,所述弧形玻璃片6包括中空通槽7以及橡胶棒8,所述L型支架9包括电液推杆10以及吸盘套件11,所述电动齿轮带4包括弯钩套件12以及旋转装置21,所述托盘16还包括挂耳17、绑定装置以及旋转模块,所述搅碎机构包括传送装置13、搅碎刀具14以及出料装置15,所述出料装置15包括防护圈19以及电动伸缩吸管20。
其中,所述进料机构从上至下依次为摄像装置5、电动桶盖、电动齿轮带4、弧形玻璃片6、L型支架9,摄像装置5至少包括四组微型摄像头,所述微型摄像头分列于筒壁的上圆周口的四等分点处,各微型摄像头分别与所述处理器1连接,并实时将拍摄影像发送给所述处理器1,所述处理器1同时处理各微型摄像头发送的拍摄影像,并将所有拍摄影像同步合成统一视角的综合影像,所述处理器1根据所述综合影像计算出食材的全面尺寸。
处理器1还可根据所述摄像装置5识别食材的类别,并判断各食材之间是否存在矛盾关系,即各食材组合不可食用,若各食材之前矛盾,则将所述食材通过电动齿轮带4原路返回。
所述电动桶盖与任意一面弧形玻璃片6的顶端固定相连,并可绕连接点向上或向下旋转,实现所述筒壁的开放。
所述筒壁的内径大小可随食材的尺寸进行调整,所述弧形玻璃片6的内部设置有若干等间距的中空通槽7,所述中空通槽7中部的尺寸大于两端的尺寸,在所述中空通槽7内预埋有橡胶棒8,所述橡胶棒8末端的尺寸小于所述中空通槽7两端的尺寸,相邻的弧形玻璃片6中相同高度通槽7内的橡胶棒8相连,每条通槽7内均设置有两根橡胶棒8,橡胶棒8内置有若干金属丝,所述金属丝可提升橡胶棒8的耐用度。
所述弧形玻璃片6的底部设置有若干可供食材通过的缺口。
L型支架9环绕于所述筒壁设置,且L型支架9与弧形玻璃板建立一一对应的关系,所述L型支架9的竖杆固定不动,L型支架9的横杆设置为电液推杆10,且所述横杆的末端设置有吸盘套件11,所述L型支架9通过所述吸盘套件11与所述弧形玻璃片6建立连接关系,每副L型支架9控制一块弧形玻璃片6的伸缩运动,且每副L型支架9均同步进退。
其中,每副L型支架9可设置有多根横杆,各横杆保持相同的运动状态。
在初始状态下,所述橡胶棒8收纳于所述中空通槽7内,此时,筒壁的内径为默认状态,当需要将筒壁的内径调大时,缩短所述电液推杆10的长度,横杆带动所述弧形玻璃片6向外侧移动,并将橡胶棒8从所述弧形玻璃片6的中空通槽7内拉伸出来,且保持各弧形玻璃片6的连接关系。
电动齿轮带4也与弧形玻璃片6建立一一对应的关系,每根电动齿轮带4依附一块弧形玻璃片6,并可绕所述弧形玻璃片6循环滚动。
所述电动齿轮带4表面设置有等间距的弯钩套件12,所述弯钩套件12用于承载食材,所述弯钩套件12在筒壁内呈现向上弯起的状态,所述弯钩套件12在筒壁外呈现向下弯起的状态。
所述托盘16用于乘放零散形态的食材,例如,当需要榨汁的水果已切成块状无法直接通过电动齿轮带4传送,则将食材先放置在托盘16上,再将所述托盘16放置在弯钩套件12上。
折叠型挡板22用于隔离进料机构与搅碎机构,其可设置于两处,其中一处为筒壁与穿送装置之间,另一处为筒壁与搅碎刀具14之间。
实施例二
如图1-7所示,本实施例提供一种可连续作业型智能榨汁设备的工作方法,包括以下工作步骤:
S101:所述摄像装置5获取进入所述筒壁的食材的外观并将拍摄影像发送给所述处理器1。
S102:所述处理器1根据所述外观计算所述食材的尺寸,所述尺寸为所述食材的最小外接圆的半径。
S103:所述处理器1根据所述尺寸设定所述筒壁的内径以及对应的电液推杆10的长度,所述尺寸加上预设距离等于所述筒壁的内径。
S104:所述处理器1向所述驱动装置2输出伸长或缩短信号,所述驱动装置2驱动所述电液推杆10伸长或缩短至所述长度。
S105:所述处理器1向所述驱动装置2输出第一传送信号,所述驱动装置2驱动所述电动齿轮带4带动食材向下传送。
S106:所述处理器1向所述驱动装置2输出第二传送信号,所述驱动装置2驱动所述传送装置13将所述食材传送至搅碎刀具14内。
S107:所述处理器1向所述驱动装置2输出搅碎信号,所述驱动装置2驱动所述搅碎刀具14启动。
当榨汁完毕后,用户将杯具放置于防护圈19下方,所述处理器1向所述驱动装置2输出输水信号,所述驱动装置2驱动电动伸缩吸管20伸入所述杯具。
若食材外观为不规则形状,通过旋转装置21向上或向下调整所述弯钩套件12的弯折角度。
在榨汁之前,先将进料机构与搅拌机构隔离,所述处理器1向所述驱动装置2输出伸出信号,所述驱动装置2驱动折叠型挡板22向外侧伸出。
激光测距仪21检测所述折叠型挡板22至其上方食材的间距并将其发送给所述处理器1。
所述处理器1判断所述间距是否小于或等于预设间距。
若是,所述处理器1向所述驱动装置2输出暂停信号,所述驱动装置2驱动所述电动齿轮带4暂停传送,当榨汁完毕后再恢复。
具体地,在S101中,在默认状态下,筒壁的内径处于最小状态,当用户需要榨汁时,所述处理器1向所述驱动装置2输出开盖信号,所述驱动装置2驱动所述电动桶盖开启,用户将食材放置在筒壁上方,所述摄像装置5获取食材的外观并将拍摄影像发送给所述处理器1。
在S102中,所述处理器1根据接收到的拍摄影像计算所述食材的尺寸,其中,各个角度的影像可计算得出不同数据的尺寸,对所述食材进行建模,取其最小外接圆,所述最小外接圆的半径即为所述食材的尺寸。
在S103中,所述处理器1将所述食材的尺寸加上预设距离得出筒壁的内径以及对应的电液推杆10的长度,在本实施例中,将预设距离设定为0.02米。
在S104中,在初次使用时,筒壁内径处理最小状态,若食材的尺寸大于或等于筒壁的初始内径,所述处理器1向所述驱动装置2输出缩短信号,所述驱动装置2驱动所述电液推杆10缩短至所述长度。
例如,所述筒壁的初始内径为0.03米,食材的尺寸为0.05米,预设距离为0.02米,电液推杆10的初始长度为0.1米,则工作后的筒壁的内径为0.07米,对应的电液推杆10的长度为0.08米,电液推杆10缩短0.02米,所述处理器1向所述驱动装置2输出缩短信号,所述驱动装置2驱动所述电液推杆10缩短0.02米。
在S105中,此时,食材恰好位于处于弯钩套件12上,同批次的食材尺寸相似,但是食材的表面有可能存在凹坑,若所述弯钩套件12托举的位置恰好处于所述凹坑内,所述处理器1通过所述驱动装置2控制旋转装置21带动所述弯钩套件12向上方旋转直至所述弯钩套件12伸入所述凹坑内。
所述处理器1向所述驱动装置2输出第一传送信号,所述驱动装置2驱动所述电动齿轮带4带动食材向下方传送。
若用户还有其他食材需要一并榨汁,则再将其他食材放置在筒壁的上方,重复执行S101至S105。
在S106中,当所述食材传送至所述筒壁的最下方时,托举所述食材的弯钩套件12向筒壁的外部旋转并松开对所述食材的托举,此时,食材下落至传送装置13上,所述处理器1向所述驱动装置2输出第二传送信号,所述驱动装置2驱动所述传送装置13启动,所述传送装置13将所述食材传送至所述搅碎机构中。
在S107中,当所有食材均传送至所述搅碎机构中时,所述处理器1向所述驱动装置2输出搅碎信号,所述驱动装置2驱动所述搅碎刀具14启动,所述搅碎刀具14将所述搅碎机构内的食材搅碎呈汁,榨汁完毕后,关闭所述搅碎刀具14,用户将盛饮料的杯具摆放在输出装置的下方,所述处理器1向所述驱动装置2输出输水信号,所述驱动装置2驱动所述电动伸缩习惯伸入这所述杯具的底部。
所述电动伸缩习惯内置有一电控阀门,所述电控阀门与所述驱动装置2连接,当所述电动伸缩吸管20伸入杯具后,开启所述电控阀门,饮料可流入所述杯具中。
实施例三
如图1-8所示,本实施例提供一种食材的传送方法,若所述食材为零散形态时,将托盘16通过挂耳17挂在同一侧的弯钩套件12上,所述处理器1向所述驱动装置2输出绑定信号,所述驱动装置2驱动所述绑定装置启动。
当所述托盘16移动至所述筒壁的最下端时,所述处理器1向所述驱动装置2输出解绑信号,所述驱动装置2驱动所述托盘16一侧的绑定装置解除对弯钩套件12的绑定。
当所述托盘16重新回到所述筒壁的最上端时,所述托盘16另一侧的挂耳17重新与所述弯钩套件12连接,所述处理器1向所述驱动装置2输出绑定信号,所述绑定装置重新与所述弯钩套件12绑定。
具体地,完整或规则形状的食材可直接将其放入筒壁内,电动齿轮带4也可将其进行传送,而若是食材被分成零散状或是食材的尺寸小于相对的两个弯钩套件12的最小间距,此时,无法直接将食材放入筒壁内,本实施例提供托盘16来传送零散食材,其中,包括若干不同尺寸的托盘16,根据筒壁内径的不同选择合适的托盘16。
首先,将食材均匀摆放在所述托盘16上,再将所述托盘16放置在所述筒壁的最上部,且将托盘16两侧的挂耳17套在弯钩套件12上,所述处理器1通过所述驱动装置2控制绑定装置启动,所述绑定装置将托盘16绑定在弯钩套件12上,启动电动齿轮带4,所述电动齿轮带4带动所述托盘16向下方移动。
当所述托盘16移动至最下方时,所述处理器1通过所述驱动装置2控制所述托盘16一侧的一个绑定装置接触托盘16对弯钩套件12的绑定,此时,所述托盘16可随与其绑定的弯钩套件12向筒壁外侧移动,当所述托盘16旋出筒壁时,其上的食材落于传送装置13上。
当所述托盘16在所述筒壁外随电动齿轮带4重新运动至筒壁上方时,所述托盘16重回水平状态,且其一侧的挂耳17重新套于另一侧的弯钩套件12上,所述处理器1通过驱动装置2控制绑定装置再将托盘16与弯钩套件12绑定。
上述实施例只为说明本发明的技术构思及特点,其目的是让熟悉该技术领域的技术人员能够了解本发明的内容并据以实施,并不能以此来限制本发明的保护范围。凡根据本发明精神实质所作出的等同变换或修饰,都应涵盖在本发明的保护范围之内。
一种可连续作业型智能榨汁设备及其工作方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0