







专利摘要
一种桌凳组装机器人,包括后滑杆部分、夹木板部分、木板储存及夹桌腿部分、组装部分、桌腿拿取部分、桌腿运输部分,其特征在于:首先将桌板或凳板放到木板储存箱的内部,把桌腿放在桌腿运输部分上,通过传送带转动把桌腿运输到桌腿拿取部分的下方,通过桌腿夹夹起桌腿放进四个固定夹里面,通过四个转动关节转动使固定夹调整到合适的安装位置,然后转盘调整四个转孔部分和四个拧螺丝部分的位置,给桌板打洞后用拧螺丝部分把桌腿安装在桌板的下面完成安装,通过后滑杆部分和夹木板部分调整使木板夹夹紧桌板并拿出组装好的桌子或凳子放到外边,大大减少了大量的人工操作,节约了劳动力成本的同时也提高了安装的速度和效率,实现了自动化组装桌凳。
权利要求
1.一种桌凳组装机器人,包括后滑杆部分(1)、夹木板部分(2)、木板储存及夹桌腿部分(3)、组装部分(4)、桌腿拿取部分(5)、桌腿运输部分(6),其特征在于:所述的后滑杆部分(1)的后挡板(101)的底面固定安装在组装部分(4)的底板(401)上面的最左边;所述的夹木板部分(2)的第一旋转铰座(201)的底面固定安装在后滑杆部分(1)的滑动架(109)的下面;所述的木板储存及夹桌腿部分(3)的木板储存箱(301)的底面固定安装在组装部分(4)的底板(401)上面中间位置;所述的桌腿拿取部分(5)的桌腿拿取机械臂(501)的上面固定安装在木板储存及夹桌腿部分(3)的木板储存箱(301)的右面的上边;所述的桌腿运输部分(6)的四个固定杆(604)的底面固定安装在组装部分(4)的底板(401)的上面的右边位置;
所述的后滑杆部分(1)包括后挡板(101)、两个滑轨(102)、第一齿条(103)、后滑杆(104)、两个燕尾槽(105)、第一步进电机(106)、第一齿轮(107)、第二齿条(108)、滑动架(109)、第二步进电机(110)、第二齿轮(111),所述的后挡板(101)是一块立起的长方形板子,其左面上边设有两个滑轨(102),在两个滑轨(102)的中间位置设有第一齿条(103);所述的两个滑轨(102)与两个燕尾槽(105)滑动连接;所述的后滑杆(104)是一个L形的杆子,其靠下位置的右面设有两个燕尾槽(105),其上面横杆的中间设有第二齿条(108);所述的第一步进电机(106)竖直向上放置,其底部固定安装在后滑杆(104)的下面的凹槽的下面,其电机轴与第一齿轮(107)固定连接;所述的第一齿轮(107)与第一齿条(103)相互啮合;所述的滑动架(109)滑动安装在后滑杆(104)的上面的横杆外边,其中间设有长方形通孔;所述的第二步进电机(110)水平放置,其底面固定安装在滑动架(109)的凹槽的左面,其电机轴与第二齿轮(111)固定连接;所述的第二齿轮(111)与第二齿条(108)相互啮合;
所述的夹木板部分(2)包括第一旋转铰座(201)、第一舵机(202)、第一伸缩套筒(203)、第一液压缸(204)、第二旋转铰座(205)、第二舵机(206)、木板夹(207)、两个第三齿条(208)、滑动夹板(209)、两个第三步进电机(210)、两个第三齿轮(211),所述的第一舵机(202)的侧面固定安装在第一旋转铰座(201)的前面的凹槽中,其舵机轴穿过第一旋转铰座(201)侧面的孔与第一伸缩套筒(203)的上端固定连接;所述的第一液压缸(204)位于第一伸缩套筒(203)的后边,其缸体底端固定安装在第一伸缩套筒(203)的套筒部分后面的挡板下面,其活塞杆端与第一伸缩套筒(203)的伸缩杆后面的挡板的上面固定连接;所述的第二旋转铰座(205)的底部固定安装在第一伸缩套筒(203)的伸缩杆端部;所述的第二舵机(206)水平放置,其侧面固定安装在第二旋转铰座(205)前面的凹槽里,其舵机轴穿过第二旋转铰座(205)侧面的孔与木板夹(207)上面凸台部分固定连接;所述的木板夹(207)竖直向下放置,其两侧各设有一个第三齿条(208),其底部设有两个燕尾槽;所述的滑动夹板(209)是一个长方形板子,其上面设有两个滑轨与木板夹(207)的两个燕尾槽滑动连接;所述的两个第三步进电机(210)竖直向上放置,其两个内侧面分别与滑动夹板(209)的左右两面固定连接,其两个电机轴分别与两个第三齿轮(211)固定连接;所述的两个第三齿轮(211)分别与两个第三齿条(208)相互啮合;
所述的木板储存及夹桌腿部分(3)包括木板储存箱(301)、三个第二液压缸底板(302)、三个第二液压缸(303)、三个固定板(304)、多个木板(305)、两个第二伸缩套筒(306)、两个第三液压缸(307)、转动轴(308)、四个转动关节(309)、四个第三伸缩套筒(310)、四个第四液压缸(311)、四个固定夹(312),所述的木板储存箱(301)是一个无盖中空的箱子其左面和前面后面的中间各设有一个圆孔;所述的三个第二液压缸底板(302)的底面里端分别与木板储存箱(301)的左面和前面后面的下边固定连接;所述的三个第二液压缸(303)分别位于三个第二液压缸底板(302)的上方,其缸体底端分别固定在三个第二液压缸底板(302)的后挡板的里侧,其三个活塞杆分别穿过木板储存箱(301)左面和前面后面的中间圆孔与三个固定板(304)固定连接;所述的多个木板(305)竖直放置在木板储存箱(301)的内部的三个固定板(304)的中间;所述的两个第二伸缩套筒(306)的套筒底端固定安装在组装部分(4)的底板(401)的中间位置,其两个伸缩杆的上方内侧与转动轴(308)的左右两端固定链接;所述的两个第三液压缸(307)分别位于两个第二伸缩套筒(306)的外侧,其缸体底端固定安装在第二伸缩套筒(306)的套筒部分外侧的挡板上面,其活塞杆端与第二伸缩套筒(306)的伸缩杆部分外侧的挡板的下面;所述的四个转动关节(309)转动安装在转动轴(308)外围;所述的四个第三伸缩套筒(310)的套筒底端固定安装在四个转动关节(309)的外边,其四个伸缩杆端分别与四个固定夹(312)固定连接;所述的四个第四液压缸(311)位于四个第三伸缩套筒(310)的侧面,其四个缸体底端分别固定安装在四个第三伸缩套筒(310)的套筒部分侧面的挡板上面,其四个活塞杆端分别与四个第三伸缩套筒(310)的伸缩杆部分侧面的挡板的下面固定连接;
所述的组装部分(4)包括底板(401)、第三舵机(402)、转盘(403)、四个转孔部分(404)、四个拧螺丝部分(405)、第三旋转铰座(4041)、转孔机械臂(4042)、第四旋转铰座(4043)、第五液压缸(4044)、第五旋转铰座(4045)、第六旋转铰座(4046)、第六液压缸(4047)、支撑架(4048)、第七液压缸(4049)、钻头(4050)、第七旋转铰座(4051)、拧螺丝机械臂(4052)、拧螺丝头(4053),所述的底板(401)是一块长方形板子,其上面的靠右位置设有螺丝盒,其后面设有固定板;所述的第三舵机(402)水平放置,其底部固定安装在底板(401)后面的固定板的左侧面,其舵机轴与转盘(403)的中间固定连接;所述的四个转孔部分(404)的最右端的第三旋转铰座(4041)底部均匀的固定安装在转盘(403)的左面;所述的四个拧螺丝部分(405)位于四个转孔部分(404)的左边,其最右边的第七旋转铰座(4051)的底面均匀的固定安装在转盘(403)的左面;所述的转孔机械臂(4042)是一个中间设有多个转动关节的可转动的机械臂,其右端与第三旋转铰座(4041)的旋转轴转动连接,其左端与支撑架(4048)的中间转动连接;所述的第四旋转铰座(4043)的底部固定安装在转孔机械臂(4042)的右半部分上面,其旋转轴与第五液压缸(4044)的缸体底端转动连接;所述的第五旋转铰座(4045)的底部固定安装在转孔机械臂(4042)的左半部分的上面,其旋转轴与第五液压缸(4044)的活塞杆端转动连接;所述的第六旋转铰座(4046)的底部固定安装在转孔机械臂(4042)的左半部分的上面,其旋转轴与第六液压缸(4047)的缸体底端转动连接;所述的第六液压缸(4047)的活塞杆端与支撑架(4048)的右边的转动轴固定连接;所述的第七液压缸(4049)的缸体底端固定安装在支撑架(4048)的左边的转动轴上,其活塞杆端与钻头(4050)的下方的挡板的下面固定连接;所述的钻头(4050)的底端固定安装在支撑架(4048)的中间位置;所述的拧螺丝机械臂(4052)的中间设有多个转动关节,其底部与第七旋转铰座(4051)的旋转轴转动连接,其顶部与拧螺丝头(4053)的底部固定连接;
所述的桌腿拿取部分(5)包括桌腿拿取机械臂(501)、第四舵机(502)、桌腿夹(503)、桌腿夹板(504)、第八液压缸(505),所述的桌腿拿取机械臂(501)的中间设有多个转动关节,其底部设有凹槽;所述的第四舵机(502)的底部固定安装在桌腿拿取机械臂(501)的下面的凹槽中,其舵机轴与桌腿夹(503)的底部固定连接;所述的桌腿夹板(504)滑动按装在桌腿夹(503)的内部;所述的第八液压缸(505)的缸体底端固定安装在桌腿夹(503)的左面的挡板的右侧,其活塞杆端与桌腿夹板(504)的左侧固定连接。
2.根据权利要求1所述的一种桌凳组装机器人,其特征在于:所述的桌腿运输部分(6)包括传送带(601)、多个桌腿挡板(602)、两个第四步进电机(603)、四个固定杆(604),所述的传送带(601)是一个传送履带,其上面设有多个桌腿挡板(602);所述的两个第四步进电机(603)固定安装在传送带(601)的前面的两个固定块中,其两个电机轴分别与传送带(601)内部的左右两端固定连接;所述的四个固定杆(604)的顶部分别与传送带(601)的两侧的四个固定块的下面固定连接。
说明书
技术领域
本发明涉及家具组装技术领域,特别涉及一种桌凳组装机器人。
背景技术
当前社会大部分的桌凳组装几乎都是人工操作安装,既费时又费力而且成本较高,市面上的一部分机器也只能固定的安装一种类型,因此急需一种既可以减少人工提高效率而且可以安装不同类型的桌凳的组装机器。
发明内容
针对上述问题,本发明提供了一种桌凳组装机器人,首先将桌板或凳板放到木板储存箱的内部,把桌腿放在桌腿运输部分上,通过传送带转动把桌腿运输到桌腿拿取部分的下方,通过桌腿夹夹起桌腿放进四个固定夹里面,通过四个转动关节转动使固定夹调整到合适的安装位置,然后转盘调整四个转孔部分和四个拧螺丝部分的位置,给桌板打洞后用拧螺丝部分把桌腿安装在桌板的下面完成安装,通过后滑杆部分和夹木板部分调整使木板夹夹紧桌板并拿出组装好的桌子或凳子放到外边,大大减少了大量的人工操作,节约了劳动力成本的同时也提高了安装的速度和效率,实现了自动化组装桌凳。
本发明所使用的技术方案是:一种桌凳组装机器人,包括后滑杆部分、夹木板部分、木板储存及夹桌腿部分、组装部分、桌腿拿取部分、桌腿运输部分,其特征在于:所述的后滑杆部分的后挡板的底面固定安装在组装部分的底板上面的最左边;所述的夹木板部分的第一旋转铰座的底面固定安装在后滑杆部分的滑动架的下面;所述的木板储存及夹桌腿部分的木板储存箱的底面固定安装在组装部分的底板上面中间位置;所述的桌腿拿取部分的桌腿拿取机械臂的上面固定安装在木板储存及夹桌腿部分的木板储存箱的右面的上边;所述的桌腿运输部分的四个固定杆的底面固定安装在组装部分的底板的上面的右边位置;
所述的后滑杆部分包括后挡板、两个滑轨、第一齿条、后滑杆、两个燕尾槽、第一步进电机、第一齿轮、第二齿条、滑动架、第二步进电机、第二齿轮,所述的后挡板是一块立起的长方形板子,其左面上边设有两个滑轨,在两个滑轨的中间位置设有第一齿条;所述的两个滑轨与两个燕尾槽滑动连接;所述的后滑杆是一个L形的杆子,其靠下位置的右面设有两个燕尾槽,其上面横杆的中间设有第二齿条;所述的第一步进电机竖直向上放置,其底部固定安装在后滑杆的下面的凹槽的下面,其电机轴与第一齿轮固定连接;所述的第一齿轮与第一齿条相互啮合;所述的滑动架滑动安装在后滑杆的上面的横杆外边,其中间设有长方形通孔;所述的第二步进电机水平放置,其底面固定安装在滑动架的凹槽的左面,其电机轴与第二齿轮固定连接;所述的第二齿轮与第二齿条相互啮合;
所述的夹木板部分包括第一旋转铰座、第一舵机、第一伸缩套筒、第一液压缸、第二旋转铰座、第二舵机、木板夹、两个第三齿条、滑动夹板、两个第三步进电机、两个第三齿轮,所述的第一舵机的侧面固定安装在第一旋转铰座的前面的凹槽中,其舵机轴穿过第一旋转铰座侧面的孔与第一伸缩套筒的上端固定连接;所述的第一液压缸位于第一伸缩套筒的后边,其缸体底端固定安装在第一伸缩套筒的套筒部分后面的挡板下面,其活塞杆端与第一伸缩套筒的伸缩杆后面的挡板的上面固定连接;所述的第二旋转铰座的底部固定安装在第一伸缩套筒的伸缩杆端部;所述的第二舵机水平放置,其侧面固定安装在第二旋转铰座前面的凹槽里,其舵机轴穿过第二旋转铰座侧面的孔与木板夹上面凸台部分固定连接;所述的木板夹竖直向下放置,其两侧各设有一个第三齿条,其底部设有两个燕尾槽;所述的滑动夹板是一个长方形板子,其上面设有两个滑轨与木板夹的两个燕尾槽滑动连接;所述的两个第三步进电机竖直向上放置,其两个内侧面分别与滑动夹板的左右两面固定连接,其两个电机轴分别与两个第三齿轮固定连接;所述的两个第三齿轮分别与两个第三齿条相互啮合;
所述的木板储存及夹桌腿部分包括木板储存箱、三个第二液压缸底板、三个第二液压缸、三个固定板、多个木板、两个第二伸缩套筒、两个第三液压缸、转动轴、四个转动关节、四个第三伸缩套筒、四个第四液压缸、四个固定夹,所述的木板储存箱是一个无盖中空的箱子其左面和前面后面的中间各设有一个圆孔;所述的三个第二液压缸底板的底面里端分别与木板储存箱的左面和前面后面的下边固定连接;所述的三个第二液压缸分别位于三个第二液压缸底板的上方,其缸体底端分别固定在三个第二液压缸底板的后挡板的里侧,其三个活塞杆分别穿过木板储存箱左面和前面后面的中间圆孔与三个固定板固定连接;所述的多个木板竖直放置在木板储存箱的内部的三个固定板的中间;所述的两个第二伸缩套筒的套筒底端固定安装在组装部分的底板的中间位置,其两个伸缩杆的上方内侧与转动轴的左右两端固定链接;所述的两个第三液压缸分别位于两个第二伸缩套筒的外侧,其缸体底端固定安装在第二伸缩套筒的套筒部分外侧的挡板上面,其活塞杆端与第二伸缩套筒的伸缩杆部分外侧的挡板的下面;所述的四个转动关节转动安装在转动轴外围;所述的四个第三伸缩套筒的套筒底端固定安装在四个转动关节的外边,其四个伸缩杆端分别与四个固定夹固定连接;所述的四个第四液压缸位于四个第三伸缩套筒的侧面,其四个缸体底端分别固定安装在四个第三伸缩套筒的套筒部分侧面的挡板上面,其四个活塞杆端分别与四个第三伸缩套筒的伸缩杆部分侧面的挡板的下面固定连接;
所述的组装部分包括底板、第三舵机、转盘、四个转孔部分、四个拧螺丝部分、第三旋转铰座、转孔机械臂、第四旋转铰座、第五液压缸、第五旋转铰座、第六旋转铰座、第六液压缸、支撑架、第七液压缸、钻头、第七旋转铰座、拧螺丝机械臂、拧螺丝头,所述的底板是一块长方形板子,其上面的靠右位置设有螺丝盒,其后面设有固定板;所述的第三舵机水平放置,其底部固定安装在底板后面的固定板的左侧面,其舵机轴与转盘的中间固定连接;所述的四个转孔部分的最右端的第三旋转铰座底部均匀的固定安装在转盘的左面;所述的四个拧螺丝部分位于四个转孔部分的左边,其最右边的第七旋转铰座的底面均匀的固定安装在转盘的左面;所述的转孔机械臂是一个中间设有多个转动关节的可转动的机械臂,其右端与第三旋转铰座的旋转轴转动连接,其左端与支撑架的中间转动连接;所述的第四旋转铰座的底部固定安装在转孔机械臂的右半部分上面,其旋转轴与第五液压缸的缸体底端转动连接;所述的第五旋转铰座的底部固定安装在转孔机械臂的左半部分的上面,其旋转轴与第五液压缸的活塞杆端转动连接;所述的第六旋转铰座的底部固定安装在转孔机械臂的左半部分的上面,其旋转轴与第六液压缸的缸体底端转动连接;所述的第六液压缸的活塞杆端与支撑架的右边的转动轴固定连接;所述的第七液压缸的缸体底端固定安装在支撑架的左边的转动轴上,其活塞杆端与钻头的下方的挡板的下面固定连接;所述的钻头的底端固定安装在支撑架的中间位置;所述的拧螺丝机械臂的中间设有多个转动关节,其底部与第七旋转铰座的旋转轴转动连接,其顶部与拧螺丝头的底部固定连接;
所述的桌腿拿取部分包括桌腿拿取机械臂、第四舵机、桌腿夹、桌腿夹板、第八液压缸,所述的桌腿拿取机械臂的中间设有多个转动关节,其底部设有凹槽;所述的第四舵机的底部固定安装在桌腿拿取机械臂的下面的凹槽中,其舵机轴与桌腿夹的底部固定连接;所述的桌腿夹板滑动按装在桌腿夹的内部;所述的第八液压缸的缸体底端固定安装在桌腿夹的左面的挡板的右侧,其活塞杆端与桌腿夹板的左侧固定连接;
所述的桌腿运输部分包括传送带、多个桌腿挡板、两个第四步进电机、四个固定杆,所述的传送带是一个传送履带,其上面设有多个桌腿挡板;所述的两个第四步进电机固定安装在传送带的前面的两个固定块中,其两个电机轴分别与传送带内部的左右两端固定连接;所述的四个固定杆的顶部分别与传送带的两侧的四个固定块的下面固定连接。
本发明的有益效果:将桌板或凳板放到木板储存箱的内部,把桌腿放在桌腿运输部分上,通过传送带转动把桌腿运输到桌腿拿取部分的下方,通过桌腿夹夹起桌腿放进四个固定夹里面,通过四个转动关节转动使固定夹调整到合适的安装位置,然后转盘调整四个转孔部分和四个拧螺丝部分的位置,给桌板打洞后用拧螺丝部分把桌腿安装在桌板的下面完成安装,通过后滑杆部分和夹木板部分调整使木板夹夹紧桌板并拿出组装好的桌子或凳子放到外边,大大减少了大量的人工操作,节约了劳动力成本的同时也提高了安装的速度和效率,实现了自动化组装桌凳。
附图说明
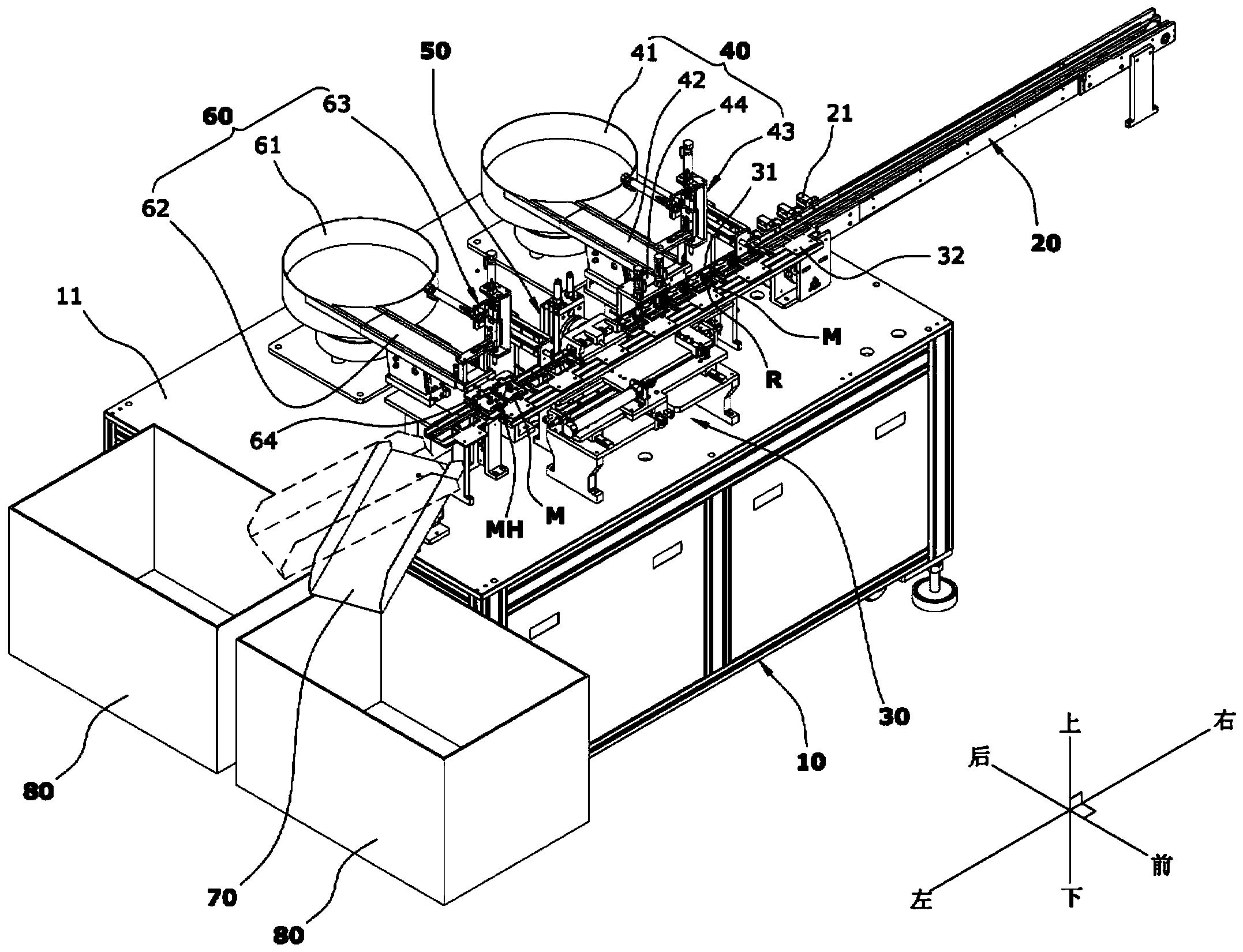
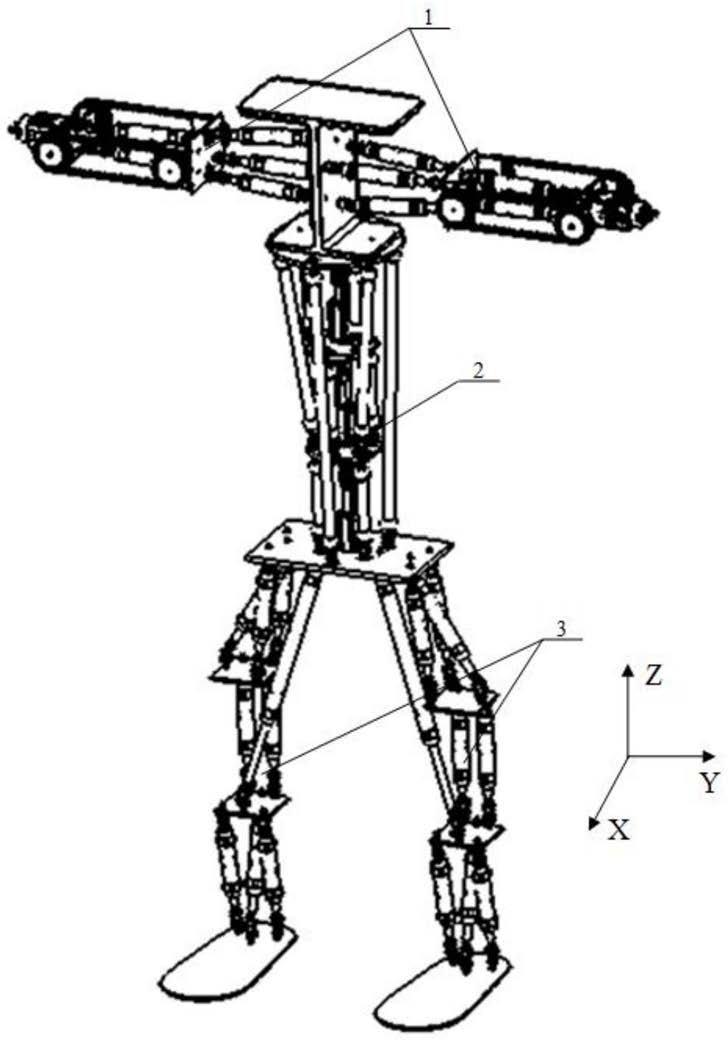
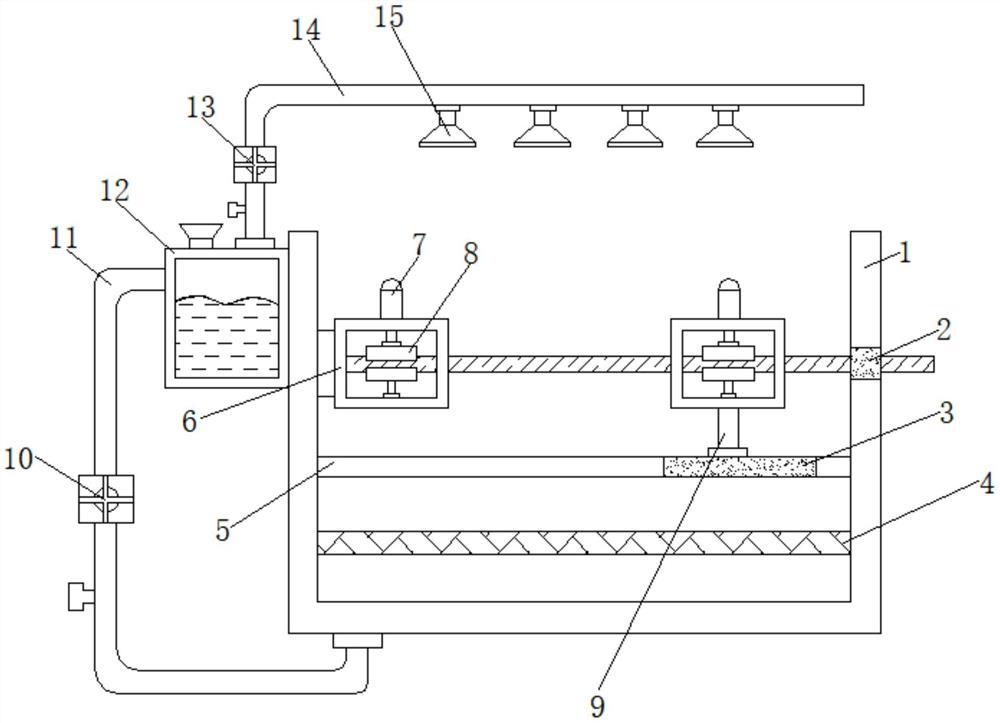
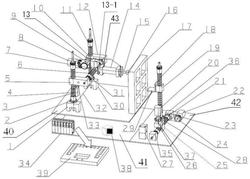
图1、图2为本发明的整体结构示意图。
图3为本发明的后滑杆部分的结构示意图。
图4、图5为本发明的夹木板部分的结构示意图。
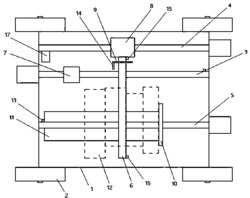
图6为本发明的木板储存及夹桌腿部分的结构示意图。
图7、图8为本发明的组装部分的结构示意图。
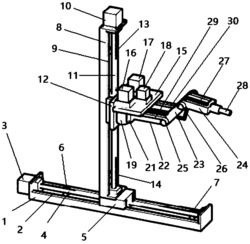
图9为本发明的桌腿拿取部分的结构示意图。
图10为本发明的桌腿运输部分的结构示意图。
附图标号:1-后滑杆部分、2-夹木板部分、3-木板储存及夹桌腿部分、4-组装部分、5-桌腿拿取部分、6-桌腿运输部分、101-后挡板、102-滑轨、103-第一齿条、104-后滑杆、105-燕尾槽、106-第一步进电机、107-第一齿轮、108-第二齿条、109-滑动架、110-第二步进电机、111-第二齿轮、201-第一旋转铰座、202-第一舵机、203-第一伸缩套筒、204-第一液压缸、205-第二旋转铰座、206-第二舵机、207-木板夹、208-第三齿条、209-滑动夹板、210-第三步进电机、211-第三齿轮、301-木板储存箱、302-第二液压缸底板、303-第二液压缸、304-固定板、305-木板、306-第二伸缩套筒、307-第三液压缸、308-转动轴、309-转动关节、310-第三伸缩套筒、311-第四液压缸、312-桌腿夹、401-底板、402-第三舵机、403-转盘、404-转孔部分、405-拧螺丝部分、4041-第三旋转铰座、4042-转孔机械臂、4043-第四旋转铰座、4044-第五液压缸、4045-第五旋转铰座、4046-第六旋转铰座、4047-第六液压缸、4048-支撑架、4049-第七液压缸、4050-钻头、4051-第七旋转铰座、4052-拧螺丝机械臂、4053-拧螺丝头、501-桌腿拿取机械臂、502-第四舵机、503-桌腿夹、504-桌腿夹板、505-第八液压缸、601-传送带、602-桌腿挡板、603-第四步进电机、604-固定杆。
具体实施方式
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
实施例如图1、图2、图3、图4、图5、图6、图7、图8、图9、图10所示,一种桌凳组装机器人,包括后滑杆部分1、夹木板部分2、木板储存及夹桌腿部分3、组装部分4、桌腿拿取部分5、桌腿运输部分6,其特征在于:所述的后滑杆部分1的后挡板101的底面固定安装在组装部分4的底板401上面的最左边;所述的夹木板部分2的第一旋转铰座201的底面固定安装在后滑杆部分1的滑动架109的下面;所述的木板储存及夹桌腿部分3的木板储存箱301的底面固定安装在组装部分4的底板401上面中间位置;所述的桌腿拿取部分5的桌腿拿取机械臂501的上面固定安装在木板储存及夹桌腿部分3的木板储存箱301的右面的上边;所述的桌腿运输部分6的四个固定杆604的底面固定安装在组装部分4的底板401的上面的右边位置;
所述的后滑杆部分1包括后挡板101、两个滑轨102、第一齿条103、后滑杆104、两个燕尾槽105、第一步进电机106、第一齿轮107、第二齿条108、滑动架109、第二步进电机110、第二齿轮111,所述的后挡板101是一块立起的长方形板子,其左面上边设有两个滑轨102,在两个滑轨102的中间位置设有第一齿条103;所述的两个滑轨102与两个燕尾槽105滑动连接;所述的后滑杆104是一个L形的杆子,其靠下位置的右面设有两个燕尾槽105,其上面横杆的中间设有第二齿条108;所述的第一步进电机106竖直向上放置,其底部固定安装在后滑杆104的下面的凹槽的下面,其电机轴与第一齿轮107固定连接;所述的第一齿轮107与第一齿条103相互啮合;所述的滑动架109滑动安装在后滑杆104的上面的横杆外边,其中间设有长方形通孔;所述的第二步进电机110水平放置,其底面固定安装在滑动架109的凹槽的左面,其电机轴与第二齿轮111固定连接;所述的第二齿轮111与第二齿条108相互啮合;
所述的夹木板部分2包括第一旋转铰座201、第一舵机202、第一伸缩套筒203、第一液压缸204、第二旋转铰座205、第二舵机206、木板夹207、两个第三齿条208、滑动夹板209、两个第三步进电机210、两个第三齿轮211,所述的第一舵机202的侧面固定安装在第一旋转铰座201的前面的凹槽中,其舵机轴穿过第一旋转铰座201侧面的孔与第一伸缩套筒203的上端固定连接;所述的第一液压缸204位于第一伸缩套筒203的后边,其缸体底端固定安装在第一伸缩套筒203的套筒部分后面的挡板下面,其活塞杆端与第一伸缩套筒203的伸缩杆后面的挡板的上面固定连接;所述的第二旋转铰座205的底部固定安装在第一伸缩套筒203的伸缩杆端部;所述的第二舵机206水平放置,其侧面固定安装在第二旋转铰座205前面的凹槽里,其舵机轴穿过第二旋转铰座205侧面的孔与木板夹207上面凸台部分固定连接;所述的木板夹207竖直向下放置,其两侧各设有一个第三齿条208,其底部设有两个燕尾槽;所述的滑动夹板209是一个长方形板子,其上面设有两个滑轨与木板夹207的两个燕尾槽滑动连接;所述的两个第三步进电机210竖直向上放置,其两个内侧面分别与滑动夹板209的左右两面固定连接,其两个电机轴分别与两个第三齿轮211固定连接;所述的两个第三齿轮211分别与两个第三齿条208相互啮合;
所述的木板储存及夹桌腿部分3包括木板储存箱301、三个第二液压缸底板302、三个第二液压缸303、三个固定板304、多个木板305、两个第二伸缩套筒306、两个第三液压缸307、转动轴308、四个转动关节309、四个第三伸缩套筒310、四个第四液压缸311、四个固定夹312,所述的木板储存箱301是一个无盖中空的箱子其左面和前面后面的中间各设有一个圆孔;所述的三个第二液压缸底板302的底面里端分别与木板储存箱301的左面和前面后面的下边固定连接;所述的三个第二液压缸303分别位于三个第二液压缸底板302的上方,其缸体底端分别固定在三个第二液压缸底板302的后挡板的里侧,其三个活塞杆分别穿过木板储存箱301左面和前面后面的中间圆孔与三个固定板304固定连接;所述的多个木板305竖直放置在木板储存箱301的内部的三个固定板304的中间;所述的两个第二伸缩套筒306的套筒底端固定安装在组装部分4的底板401的中间位置,其两个伸缩杆的上方内侧与转动轴308的左右两端固定链接;所述的两个第三液压缸307分别位于两个第二伸缩套筒306的外侧,其缸体底端固定安装在第二伸缩套筒306的套筒部分外侧的挡板上面,其活塞杆端与第二伸缩套筒306的伸缩杆部分外侧的挡板的下面;所述的四个转动关节309转动安装在转动轴308外围;所述的四个第三伸缩套筒310的套筒底端固定安装在四个转动关节309的外边,其四个伸缩杆端分别与四个固定夹312固定连接;所述的四个第四液压缸311位于四个第三伸缩套筒310的侧面,其四个缸体底端分别固定安装在四个第三伸缩套筒310的套筒部分侧面的挡板上面,其四个活塞杆端分别与四个第三伸缩套筒310的伸缩杆部分侧面的挡板的下面固定连接;
所述的组装部分4包括底板401、第三舵机402、转盘403、四个转孔部分404、四个拧螺丝部分405、第三旋转铰座4041、转孔机械臂4042、第四旋转铰座4043、第五液压缸4044、第五旋转铰座4045、第六旋转铰座4046、第六液压缸4047、支撑架4048、第七液压缸4049、钻头4050、第七旋转铰座4051、拧螺丝机械臂4052、拧螺丝头4053,所述的底板401是一块长方形板子,其上面的靠右位置设有螺丝盒,其后面设有固定板;所述的第三舵机402水平放置,其底部固定安装在底板401后面的固定板的左侧面,其舵机轴与转盘403的中间固定连接;所述的四个转孔部分404的最右端的第三旋转铰座4041底部均匀的固定安装在转盘403的左面;所述的四个拧螺丝部分405位于四个转孔部分404的左边,其最右边的第七旋转铰座4051的底面均匀的固定安装在转盘403的左面;所述的转孔机械臂4042是一个中间设有多个转动关节的可转动的机械臂,其右端与第三旋转铰座4041的旋转轴转动连接,其左端与支撑架4048的中间转动连接;所述的第四旋转铰座4043的底部固定安装在转孔机械臂4042的右半部分上面,其旋转轴与第五液压缸4044的缸体底端转动连接;所述的第五旋转铰座4045的底部固定安装在转孔机械臂4042的左半部分的上面,其旋转轴与第五液压缸4044的活塞杆端转动连接;所述的第六旋转铰座4046的底部固定安装在转孔机械臂4042的左半部分的上面,其旋转轴与第六液压缸4047的缸体底端转动连接;所述的第六液压缸4047的活塞杆端与支撑架4048的右边的转动轴固定连接;所述的第七液压缸4049的缸体底端固定安装在支撑架4048的左边的转动轴上,其活塞杆端与钻头4050的下方的挡板的下面固定连接;所述的钻头4050的底端固定安装在支撑架4048的中间位置;所述的拧螺丝机械臂4052的中间设有多个转动关节,其底部与第七旋转铰座4051的旋转轴转动连接,其顶部与拧螺丝头4053的底部固定连接;
所述的桌腿拿取部分5包括桌腿拿取机械臂501、第四舵机502、桌腿夹503、桌腿夹板504、第八液压缸505,所述的桌腿拿取机械臂501的中间设有多个转动关节,其底部设有凹槽;所述的第四舵机502的底部固定安装在桌腿拿取机械臂501的下面的凹槽中,其舵机轴与桌腿夹503的底部固定连接;所述的桌腿夹板504滑动按装在桌腿夹503的内部;所述的第八液压缸505的缸体底端固定安装在桌腿夹503的左面的挡板的右侧,其活塞杆端与桌腿夹板504的左侧固定连接;
所述的桌腿运输部分6包括传送带601、多个桌腿挡板602、两个第四步进电机603、四个固定杆604,所述的传送带601是一个传送履带,其上面设有多个桌腿挡板602;所述的两个第四步进电机603固定安装在传送带601的前面的两个固定块中,其两个电机轴分别与传送带601内部的左右两端固定连接;所述的四个固定杆604的顶部分别与传送带601的两侧的四个固定块的下面固定连接。
本发明工作原理:本发明在使用时首先将桌板或凳板放到木板储存及夹桌腿部分3的木板储存箱301的内部,通过木板储存及夹桌腿部分3的三个第二液压缸303的活塞杆伸长使三个固定板304把桌板或凳板挤紧,然后把桌腿放在桌腿运输部分6的桌腿挡板602中间,通过两个第四步进电机603带动传送带601转动,下一步通过桌腿拿取部分5的转动关节调整桌腿夹503的位置到桌木板储存腿的位置,通过第八液压缸505来控制桌腿夹板504夹起桌腿,通过夹桌腿部分3的四个转动关节309转动带动四个第三伸缩套筒310从而使固定夹312移动到桌腿拿取部分5的下方拿取桌腿后调整到合适的安装位置,下一步通过第三舵机402带动转盘403从而调整四个转孔部分404和四个拧螺丝部分405的位置,然后通过钻头4050给桌板打洞,通过拧螺丝头4053拧螺丝从而把桌腿安装在桌板的下面完成安装,接着通过后滑杆部分1的第一步进电机106带动第一齿轮107从而使后滑杆104左右滑动,通过第二步进电机110带动第二齿轮111从而带动滑动架109前后滑动从而调整夹木板部分2的位置到桌板的正上方,下一步通过夹木板部分2的第一液压缸204的活塞杆伸长从而使木板夹207插入木板之间的间隙,通过两个第三步进电机210带动两个第三齿轮211从而使滑动夹板209夹紧桌板,接着通过第一液压缸204的活塞杆缩回使第一伸缩套筒203的伸缩杆缩短,通过第一舵机202带动第一伸缩套筒203转动从而拿出组装好的桌子或凳子,最后把成品放到外边人工取走。
一种桌凳组装机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0