








专利摘要
本发明公开了能够除尘清灰的软体机器人,包括:至少一个基件,所述基件为柔性件,所述基件内部设有第一腔体,所述第一腔体内部充有空气,使所述基件延伸沿气流运动方向延伸;复数个摆臂,复数个所述摆臂能够通过所述气流压力不同实现弯曲和/或延伸,各个所述摆臂之间均能够单独工作,互不干扰;至少一个主风机,所述主风机设置在相邻任两所述摆臂之间,所述主风机一端连接有集尘箱,能够收集灰尘;各个摆臂的自由度均很高,能够单独互不干扰的摆动,实现不同区域的清灰除尘,灵活性较高。
权利要求
1.能够除尘清灰的软体机器人,其特征在于,包括:
至少一个基件,所述基件为柔性件,所述基件内部设有第一腔体,所述第一腔体内部充有空气,使所述基件延伸沿气流运动方向延伸;
复数个摆臂,复数个所述摆臂能够通过所述气流压力不同实现弯曲和/或延伸,各个所述摆臂之间均能够单独工作,互不干扰;
至少一个主风机,所述主风机设置在相邻任两所述摆臂之间,所述主风机一端连接有集尘箱,能够收集灰尘;
还包括第二风机与第三风机,所述第二风机与所述第三风机沿所述基件中心线对称布置;
所述摆臂自由端设有至少一个活动刷;
所述摆臂内部包括第二腔体与第三腔体,所述第二腔体与所述第三腔体内部充有空气;
所述第二腔体内部的气流压力大于所述第三腔体内部的气流压力时,所述摆臂朝所述第三腔体一侧弯曲;
气流流动为间歇震颤式运动,通过震颤的气流能够使摆臂实现往复运动。
2.根据权利要求1所述的能够除尘清灰的软体机器人,其特征在于:所述活动刷能够将灰尘聚集在靠近所述主风机中心线方向附近。
3.根据权利要求1所述的能够除尘清灰的软体机器人,其特征在于:所述主风机与所述第二风机、所述第三风机均为产生负压的引风机。
4.根据权利要求3所述的能够除尘清灰的软体机器人,其特征在于: 还包括空压机,所述空压机为所述第一腔体提供空气。
5.根据权利要求1所述的能够除尘清灰的软体机器人,其特征在于:所述气流通过空压机或空气注射泵或气缸向所述第一腔体、第二腔体与第三腔体内部抽吸空气。
说明书
技术领域
本发明涉及软体机器人,尤其涉及能够除尘清灰的软体机器人。
背景技术
软体机器人是一种新型柔韧机器人,可以仅用空气来驱动,科学家最新研究的软体机器人是采用纸质和硅橡胶制成,能够弯曲、扭转和抓起自身重量100多倍的物体,软体机器人的设计灵感是模仿人类的内部构造或昆虫的外形架构等。
有的没有设置多个风机,不能通过主风机与第二风机、第三风机进行相互配合,同时摆臂自由端没有活动刷将灰尘聚集起来,容易造成清理不干净,不能通过软体机器人进行代替工作,有的摆臂不能通过气流压力不同实现弯曲或延伸,各个摆臂之间不能单独工作,除尘效率较差。
发明内容
本发明克服了现有技术的不足,提供能够除尘清灰的软体机器人。
为达到上述目的,本发明采用的技术方案为:能够除尘清灰的软体机器人,包括:至少一个基件,所述基件为柔性件,所述基件内部设有第一腔体,所述第一腔体内部充有空气,使所述基件延伸沿气流运动方向延伸;复数个摆臂,复数个所述摆臂能够通过所述气流压力不同实现弯曲和/或延伸,各个所述摆臂之间均能够单独工作,互不干扰;至少一个主风机,所述主风机设置在相邻任两所述摆臂之间,所述主风机一端连接有集尘箱,能够收集灰尘。
本发明一个较佳实施例中,还包括第二风机与第三风机,所述第二风机与所述第三风机沿所述基件中心线对称布置。
本发明一个较佳实施例中,所述摆臂自由端设有至少一个活动刷。
本发明一个较佳实施例中,所述活动刷能够将灰尘聚集在靠近所述主风机中心线方向附近。
本发明一个较佳实施例中,所述主风机与所述第二风机、所述第三风机均为产生负压的引风机。
本发明一个较佳实施例中,还包括空压机,所述空压机为所述第一腔体提供空气。
本发明一个较佳实施例中,所述摆臂内部包括第二腔体与第三腔体,所述第二腔体与所述第三腔体内部充有空气。
本发明一个较佳实施例中,所述第二腔体内部的气流压力大于所述第三腔体内部的气流压力时,所述摆臂朝所述第三腔体一侧弯曲。
本发明一个较佳实施例中,所述气流通过空压机或空气注射泵或气缸向所述第一腔体、第二腔体与第三腔体内部抽吸空气。
本发明一个较佳实施例中,所述基件材料为合成纸质材料或纤维织物或金属丝或橡胶材质。
本发明一个较佳实施例中,所述气流流动为间歇震颤式运动,通过震颤的气流能够使所述摆臂实现往复运动。
本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
(1)基件为柔性件,基件内部设有第一腔体,第一腔体内部注射有空气,使基件延伸沿气流运动方向延伸,使软体机器人在除尘清灰过程中,灵活性较高。
(2)复数个所述摆臂能够通过气流压力不同实现弯曲和/或延伸,各个摆臂之间均能够单独工作,互不干扰,能够提高除尘的效率。
(3)摆臂内部包括第二腔体与第三腔体,第二腔体与第三腔体内部充有空气,第二腔体内部的气流压力大于第三腔体内部的气流压力时,摆臂朝第三腔体一侧弯曲,能够灵活控制摆臂的摆动方向与摆动弧度,使用比较灵活。
(4)气流流动为间歇震颤式运动,通过震颤的气流能够使摆臂实现往复运动,与人工进行扫地时的摆动相同,清扫比较干净。
(5)主风机与第二风机、第三风机均为产生负压的引风机,防止在除尘的过程中造成灰尘飞溅,从而造成环境污染。
(6)通过主风机与第二风机、第三风机进行相互配合,同时摆臂自由端设置的活动刷将灰尘聚集起来,能够实现无死角清扫,在对人工不好清理的死角或危险环境下,能够通过软体机器人进行代替工作,安全性较高。
附图说明
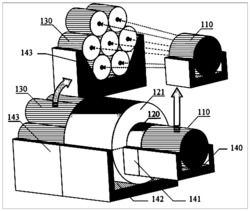
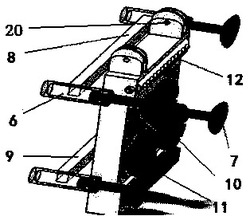
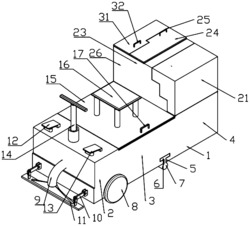
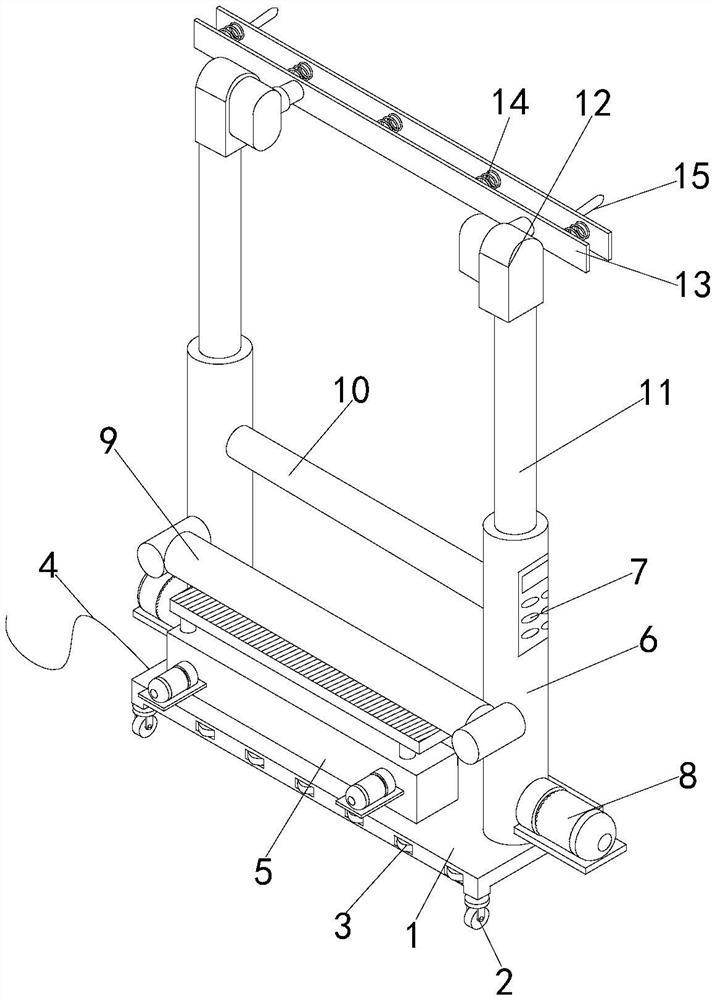
图1是本发明的优选实施例的软体机器人局部结构示意图;
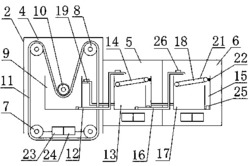
图2(a)、图2(b)是本发明的优选实施例的摆臂摆动状态示意图;
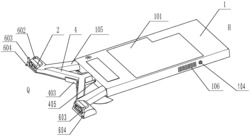
图3是本发明的优选实施例的摆臂内部结构截面图;
附图标记:
基件10;主风机11;第二风机12;第三风机13;摆臂14;活动刷15;第一腔体16;第二腔体17;第三腔体18;
空压机20;管道21;
集尘箱30。
具体实施方式
现在结合附图和实施例对本发明作进一步详细的说明,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
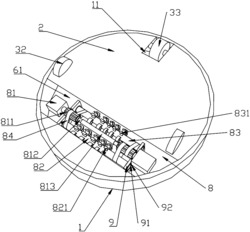
如图1、图2(a)和图2(b),用于管道21探测的软体机器人,包括:至少一个基件10、复数个摆臂14和至少一个主风机11组成。
具体而言,基件10为柔性件,基件10内部设有第一腔体16,第一腔体16内部充有空气,使基件10延伸沿气流运动方向延伸,摆臂14能够通过气流压力不同实现弯曲和/或延伸,各个摆臂14之间均能够单独工作,互不干扰,主风机11设置在相邻任两摆臂14之间,主风机11一端连接有集尘箱30,能够收集灰尘,集尘箱30能够灵活取下更换,使用比较方便。
换言之,基件10为柔性材料制作而成,使基件10使用灵活,柔性较高,各个摆臂14单独工作,互补干扰,使各个摆臂14具有较高的自由度和灵活度,气流流动为间歇震颤式运动,通过震颤的气流能够使摆臂14实现往复运动,与人工进行扫地时的摆动相同,清扫比较干净,摆臂14自由端设有至少一个活动刷15,活动刷15能够将灰尘聚集在靠近主风机11中心线方向附近,主风机11为引风机,通过引风机将活动刷15聚集的灰尘收集至集尘箱30内部,除尘效率较高。
根据本发明一个实施例,基件10材料为合成纸质材料。
可选的,基件10材料为纤维织物。
可选的,基件10材料金属丝。
可选的,基件10材料为橡胶材质。
根据本发明一个实施例,气流通过空压机20向第一腔体16、第二腔体17与第三腔体18内部抽吸空气。
可选的,气流通过空气注射泵向第一腔体16、第二腔体17与第三腔体18内部抽吸空气,也可以通过空气注射泵向基件10内部进行交替抽吸空气,使软体机器人实现往复运行,清扫灵活性较高。
可选的,气流通过气缸向第一腔体16、第二腔体17、第三腔体18内部抽吸空气。
基件10材料选用柔性较高的材料制成,使软体机器人具有较高的灵活性,使用范围较广,遇到狭小的空间能够像蛇一样伸缩起伏身体,能够通过蠕动的方式前进或变形,能够完成特定环境或空间下的工作,使用灵活性非常高。
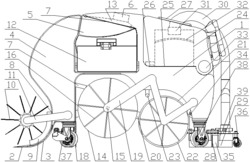
根据本发明的一个实施例,能够除尘清灰的软体机器人还包括空压机20、第二风机12与第三风机13。
具体而言,空压机20为第一腔体16提供空气,空压机20与基件10之间通过管道21连接,可将空压机20外接或将空压机20放置在户外,不会造成噪音,第二风机12与第三风机13沿基件10中心线对称布置,主风机11与第二风机12、第三风机13均为产生负压的引风机,防止在除尘的过程中造成灰尘飞溅,从而造成环境污染,通过主风机11与第二风机12、第三风机13进行相互配合,同时摆臂14自由端设置的活动刷15将灰尘聚集起来,能够实现无死角清扫,在对人工不好清理的死角或危险环境下,能够通过软体机器人进行代替工作,安全性较高。
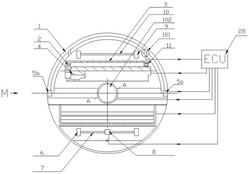
如图3所示,根据本发明的一个实施例,摆臂14内部包括第二腔体17与第三腔体18,第二腔体17与第三腔体18内部充有空气,第二腔体17内部的气流压力大于第三腔体18内部的气流压力时,摆臂14朝第三腔体18一侧弯曲,能够灵活控制摆臂14的摆动方向与摆动弧度,使摆臂14具有较高的自由度,使用比较灵活。
以上依据本发明的理想实施例为启示,通过上述的说明内容,相关人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定技术性范围。
能够除尘清灰的软体机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0