







专利摘要
一种无人驾驶公交车,由纯电动公交车、室外摄像机、室内摄像机、前左、右激光雷达、后左、右激光雷达、手动方向机、电动方向机、脚踏制动泵、电动制动泵、霍尔调速器、电动前门、电动后门、投币箱、刷卡机、语音播放器、车载计算机、蓄电池组、导航控制箱、左、右跟踪光头、导航槽、导航路由器、公交线路和供电监控站组成,其导航系统主要增加了导航控制箱和导航槽,利用导航槽导航的优点在于:不仅解决现有无人驾驶公交车视觉导航的可靠性问题,又解决纯电动汽车的供电问题,所述导航槽轨道槽口只有3厘米,槽口与路面一平,不影响城市道路十字路口或者人行横道上车辆及行人的通行,导航槽既不占用路面,又不影响交通,也不影响市容;所述无人驾驶公交车不仅能够为人们提供可靠的全自动智能化的公交服务,而且不用燃料,节能环保。
权利要求
1.一种无人驾驶公交车,由纯电动公交车、室外摄像机、室内摄像机、前左、右激光雷达、后左、右激光雷达、手动方向机、电动方向机、脚踏制动泵、电动制动泵、霍尔调速器、电动前门、电动后门、投币箱、刷卡机、语音播放器、车载计算机、蓄电池组、导航控制箱、左、右跟踪光头、导航槽、导航路由器、公交线路和供电监控站组成,其特征在于:所述无人驾驶公交车属于纯电动公交车,车后轮设置差速器(1),差速器上设置动力电机(2),车厢外顶部前端设置室外摄像机(3),车厢内顶部设置室内摄像机(4),车厢内左、右边设置语音播放器(5),车厢底层后面设置蓄电池组(6),车厢前的驾驶室仪表台左边设置车载计算机(7),车载计算机面板上设置模式转换开关(8)和跟踪指示灯(9),车载计算机内设置智能控制模块、宽带通信接收、发射模块和智能充电模块;驾驶室左前方设置方向盘(10),方向盘下端连接方向杆(11),方向杆下端设置方向机(12),所述方向盘、方向杆以及方向机组成常规的手动方向机;所述方向机上端固定空心式蜗轮减速器(13),空心式蜗轮减速器左端设置伺服电机(14),空心式蜗轮减速器上端设置空心式电磁离合器(15),所述方向杆穿进空心式蜗轮减速器和空心式电磁离合器的中心孔,所述空心式蜗轮减速器、伺服电机、空心式电磁离合器以及方向机组成一体化的电动方向机;驾驶室左下端设置制动踏板(16),制动踏板上端设置脚踏制动泵(17),脚踏制动泵右侧设置电动制动泵(18),制动踏板右边设置调速踏板(19),调速踏板下端设置霍尔调速器(20);车辆前灯左、右端设置前左、右激光雷达(21),车辆后灯左、右端设置后左、右激光雷达(22),车厢右边设置电动前门(23)和电动后门(24),电动前门和电动后门的上端设置前减速电机(25)和后减速电机(26),电动前门后边设置投币箱(27),投币箱上端设置刷卡机(28);所述无人驾驶公交车底盘中部设置导航控制箱(29),导航控制箱下端设置窗口,所述窗口前下端设置左、右跟踪光头,窗口内设置导航受电刀(30),所述导航受电刀内部设置红外接收管一、下端设置火线炭刷、中部设置接地滑轮;所述无人驾驶公交车运行在城市公交线路上,所述公交线路设置始发站(31)、末发站(32),所述公交线路是一条双向道路,双向道路的路面上设置导航槽(33),双向道路中间设置隔离栏(34),始发站、末发站之间的来往路线是循环的上、下单向道路(35、36),上单向道路的直行车道中线设置上导航槽,下单向道路的直行车道中线设置下导航槽,上导航槽的上端和下导航槽的下端,均设置若干不同地址的站台(37),所述的导航槽是上、下导航槽连接成封闭的导航槽环线,位于始发站、末发站以及各个站台的变道转弯的导航槽路线均为弧线,在上、下导航槽内部,位于始发站、末发站、十字路口、以及各个站台附近设置若干导航路由器(38),所述导航路由器内部设置宽带无线发射与接收电路、发射、接收天线、不同地址信息的编码电路和红外发射管一;所述导航槽平面上设置左、右接地电轨,所述左、右接地电轨之间设置轨道槽口,所述导航受电刀导入导航槽的轨道槽口,左、右接地电轨与导航受电刀的接地滑轮滚动连接;所述导航槽内中部设置火线电轨,火线电轨通过导航受电刀与所述火线炭刷滑动连接;在车载计算机的控制下,所述无人驾驶公交车沿所述导航槽的轨迹导航行驶,所述导航槽的轨迹是公交车从始发站到末发站来往行驶的封闭循环路线的轨迹,包括靠近公交站台时变道的轨迹和来往经过所有十字路口转弯变道的轨迹,所述公交线路上的始发站附近设置供电监控站(39),所述供电监控站设置调度监控室和供电室,所述调度监控室内设置监控电脑和电脑网线,所述供电室内设置交流电源以及供电火线和供电地线;所述智能控制模块设置若干输入、输出端,所述宽带通信接收、发射模块设置接收、发射天线,所述模式转换开关、左、右跟踪光头、红外接收管一、室外摄像机、室内摄像机、激光雷达、霍尔调速器的输出端分别连接智能控制模块的相关输入端,所述动力电机、伺服电机、空心式电磁离合器、跟踪指示灯、前减速电机、后减速电机、霍尔调速器、电动制动泵的负载端分别连接智能控制模块的相关输出端,所述室外摄像机、室内摄像机、语音播放器的输出端分别连接宽带通信接收、发射模块的相关输入端,所述调度监控室内的电脑网线连接导航槽内部所有的导航路由器的输入端,车载计算机内部的宽带通信接收、发射模块的输入、输出端分别连接智能控制模块的相关输入、输出端,通过宽带通信发射、接收天线,所述调度监控室不仅能实时监控,而且可以遥控无人驾驶公交车;供电室内所述的供电火线经过地下电缆与导航槽内所述的火线电轨连接,供电室内所述的供电地线经过地下电缆与导航槽内所述的左、右接地电轨连接,所述火线炭刷、接地滑轮的输出线连接所述智能充电模块输入端,智能充电模块输出端连接所述蓄电池组;当所述模式转换开关切换在有人驾驶模式下,车载计算机控制所述空心式电磁离合器与所述方向杆分离,方向盘成为常规的手动方向机模式,驾驶室内制动踏板和调速踏板均成为常规的有人驾驶模式,所述跟踪指示灯工作在有人监控状态;当模式转换开关切换在无人驾驶模式下,车载计算机控制所述空心式电磁离合器与所述方向杆吸合,方向盘成为电动方向机模式,所述霍尔调速器、电动制动泵、电动前门和电动后门均由车载计算机控制,在导航槽的导航下,所述无人驾驶公交车沿所述导航槽的轨迹导航行驶,所述左、右跟踪光头探测轨道槽口的输出信号经过车载计算机识别后,控制所述电动方向机左、右转向,使左、右跟踪光头始终跟踪所述轨道槽口的轨迹,所述无人驾驶公交车根据激光雷达探测到的障碍物距离,室内摄像机拍摄的乘客图像识别信息,室外摄像机拍摄的交通红绿灯图像识别信息,各种信息通过车载计算机的计算、综合分析、比较、处理、准确控制无人驾驶公交车开门、关门、语音报站提示、起步、加速、减速、转弯和停车的一系列动作;导航受电刀的红外接收管一,接受每一个导航路由器红外发射管一照射后都要向车载计算机报告具体地址信息,车载计算机按照该地址信息以及各种传感器信息和程序对无人驾驶公交车进行智能化控制,比如到达各个站点准确停车、开、关车门、起步、加速,或者遇到红绿灯,摄像机图像识别红绿灯标志后,控制车辆停车、起步、加速;在无人驾驶模式下,所述的导航槽一方面给无人驾驶公交车导航,另一方面给无人驾驶公交车供电,所述供电室内交流电源的供电火线和供电地线经过所述火线电轨和所述左、右接地电轨连接到所述智能充电模块给所述蓄电池组充电;所述导航槽与所述供电监控站组成独立的某一路公交导航槽单元,在城市公交路线中,可以设置若干个所述公交导航槽单元。
2.根据权利要求1所述无人驾驶公交车,其特征在于:所述无人驾驶公交车底盘中部设置矩形安装口,矩形安装口内安装导航控制箱,所述导航控制箱的外壳由上、下箱体连接成整体,所述上箱体(40)下端口设置四边形的上连接边,所述下箱体(41)上端口设置四边形的下连接边,所述上、下连接边四周均设置若干连接孔,由若干螺丝钉(42)将上、下连接边紧固在所述矩形安装口四周的螺母孔内,所述下箱体的前左、右端设置左、右轴孔,左、右轴孔内紧配合安装水平滑轴(43),水平滑轴上设置长轴承架(44),长轴承架左端内圆设置左双向轴承(45)、右端内圆设置右双向轴承(46),所述左、右双向轴承在水平滑轴上无论是旋转或者是水平直线运动,左、右双向轴承均处于滚动摩擦状态,阻力很小,所述长轴承架左、右上端焊接n型支架(47),n型支架后上端设置三角形的上连接板(48),上连接板后端设置轴承架及上轴承(49);所述长轴承架左、右下端焊接u型支架(50),u型支架后下端设置三角形的下连接板(51),下连接板后端设置轴承架及下轴承(52),所述上、下轴承内圆安装立轴(53),立轴中部安装减速电机,所述减速电机设置蜗轮、蜗杆减速器(54),所述蜗轮、蜗杆减速器设置减速机架(55),所述减速机架前端设置立轴套,立轴套内圆与所述立轴紧配合安装,减速机架的后端设置驱动电机(56),所述立轴套前端设置复位杆(57),复位杆前端设置复位弹簧(58),复位弹簧前端挂在所述下箱体下端的内前端,所述减速机架、立轴套及复位杆是一体化的铝合金铸件,所述减速电机不仅能够围绕所述立轴左、右旋转,又能围绕所述水平滑轴上、下旋转和左、右平移,所述减速电机的重力使所述下连接板落在下箱体的底部,所述减速电机在左、右外力作用下,能够在水平滑轴的左、右端范围内水平位移,减速电机在没有其他外力作用下,复位弹簧的拉力使减速电机保持在水平滑轴的中间位置,使复位杆保持在拉直状态;所述减速机架中部设置轴承架,轴承架内圆设置左、右轴承(59、60),所述蜗轮、蜗杆减速器设置驱动轴(61),所述驱动轴安装在所述左、右轴承内圆,所述驱动轴右端安装导航受电刀,所述导航受电刀设置刀型骨架,所述刀型骨架是用高强度塑料制造的注塑件,刀型骨架厚度为2.5厘米,刀型骨架上端设置轴孔,轴孔与驱动轴紧配合安装,刀型骨架中部设置轮圈架(62),刀型骨架中下部设置红外接收管一(63),刀型骨架下端设置炭刷架,所述刀型骨架、轮圈架和炭刷架内部均设置线路通道,炭刷架内上端设置弹簧(64)、下端设置火线炭刷(65),火线炭刷上端设置输出火线,输出火线经过所述线路通道连接到所述智能充电模块的火线输入端,所述红外接收管一的输出线,经过所述线路通道连接所述智能控制模块相关输入端;所述轮圈架左、右端设置左、右导电轮架(66、67),所述左、右导电轮架为扇形,选用弹性铜片制造,所述轮圈架中心设置接地滑轮(68),所述接地滑轮的直径截面为菱形,接地滑轮设置左、右导电锥体,接地滑轮中心设置滚针轴承及轮轴(69),所述轮轴两端安装在左、右导电轮架下端轴孔内,支撑接地滑轮,所述左、右导电轮架与所述左、右导电锥体两端是弹性接触,接地滑轮转动时,接地滑轮与左、右导电轮架滑动连接在导电状态,左、右导电轮架上端连接输出地线,输出地线经过所述线路通道连接到所述智能充电模块地线输入端,智能充电模块输出端连接到所述蓄电池组;所述无人驾驶公交车由驾驶员操作时,所述模式转换开关切换在有人驾驶模式,所述模式转换开关输出电信号到智能控制模块相关输入端,智能控制模块某输出端负电压到驱动电机,所述驱动电机反转,驱动导航受电刀向后、向上抬起;所述蓄电池组前端车底盘下设置霍尔传感器(70),导航受电刀后端设置柱型永磁体一(71),当导航受电刀抬高到柱型永磁体一接触到霍尔传感器时,霍尔传感器输出电信号到智能控制模块相关输入端,智能控制模块某输出端零电压到所述驱动电机,使导航受电刀停止在收藏状态;所述导航控制箱的下箱体下端中部设置窗口(72),下箱体后下端中部也设置窗口,所述窗口的宽度是无人驾驶公交车行驶中左、右偏离车道中线的活动范围,所述窗口前下端中部设置左、右跟踪光头(73、74),所述左、右跟踪光头是光反馈传感器,光头之间距离略小于3厘米,所述轨道槽口平行距离为3厘米,当驾驶员将无人驾驶公交车行驶在车道中线,左、右光头的光束照射在轨道槽口左、右端时,左、右跟踪光头输出电信号到智能控制模块相关输入端,智能控制模块某输出端信号电压到驾驶室跟踪指示灯,所述跟踪指示灯亮,提示驾驶员导航受电刀已经对准了轨道槽口,此时驾驶员将模式转换开关切换在无人驾驶模式,智能控制模块某输出端正电压到所述驱动电机,所述驱动电机正转,驱动导航受电刀导向所述轨道槽口,导航受电刀的宽度略小于轨道槽口的宽度,使导航受电刀准确、可靠地导入轨道槽口;所述导航控制箱的下箱体左下端设置红外发射管二(75)、右下端设置红外接收管二(76),红外发射管二光束照射红外接收管二,当所述导航受电刀导入所述轨道槽口后接近垂直时,导航受电刀遮挡红外发射管二的光束,导致红外接收管二输出电信号到智能控制模块相关输入端,智能控制模块某输出端零电压到所述驱动电机,导航受电刀立即停止,所述蜗轮、蜗杆减速器停止时具有锁定功能,此时自动受电刀稳定在接近垂直状态,所述火线炭刷与所述火线电轨接触,所述接地滑轮的左、右导电锥体与所述左、右接地电轨的左、右棱角接触;在车辆沿所述导航槽的轨迹直线行驶的过程中,所述左、右跟踪光头探测到的偏离导航槽的信号经过车载计算机识别后,控制所述电动方向机左、右转向,使车载计算机在轨道槽口的小范围内纠正车辆偏离导航槽的方向;所述导航控制箱的上箱体内上端设置左霍尔传感器(77)和右霍尔传感器(78),所述减速电机的上连接板左上端设置柱型永磁体二(79),在车辆行驶的过程中,沿所述导航槽的轨迹遇到导航槽向左转弯变道的弧线时,柱型永磁体二接近左霍尔传感器,所述左霍尔传感器输出偏离导航槽的信号到智能控制模块相关输入端,智能控制模块某输出端正电压到伺候电机,所述伺候电机正转,控制所述电动方向机左转向,遇到导航槽向右转弯变道的弧线时,柱型永磁体二接近右霍尔传感器,所述右霍尔传感器输出偏离导航槽的信号到智能控制模块相关输入端,智能控制模块某输出端负电压到伺候电机,所述伺候电机反转,控制所述电动方向机右转向,使车载计算机在所述窗口的大范围内纠正车辆偏离导航槽的方向。
3.根据权利要求1所述无人驾驶公交车,其特征在于:所述无人驾驶公交车设置导航槽,所述导航槽由水泥槽、水沟台、排水沟、绝缘柱、导电槽架、火线电轨、左、右盖板、左、右接地电轨、轨道槽口组成,所述导航槽设置在城市交通任何一路循环行驶的公交线路上,所述的公交线路为双向道路,每条单向道路又分左转车道、直行车道、右转车道,所述导航槽设置在直行车道或者变道路面的中线区域,所述中线区域的路面开挖成长壕沟,长壕沟内设置水泥槽(80),所述水泥槽的长度2倍于所述单向道路的长度,水泥槽底部中线设置水沟台(81),水沟台左、右侧是排水沟(82、83),水沟台上端设置无数个绝缘柱(84),绝缘柱选用高压线瓷瓶,绝缘柱之间的距离均为8米,绝缘柱上端均设置导电槽架(85),导电槽架下端中央设置凹面,凹面与所述高压线瓷瓶上端吻合,用A、B胶将导电槽架与高压线瓷瓶粘连为一体;绝缘柱下端均固定连接板(86),连接板均固定在水沟台上预设的无数个左、右螺丝钉(87、88)上;所述导电槽架向上的槽口为弧形,槽口上前、后端均安装火线电轨,所述火线电轨的截面为弧形,火线电轨上端的凹面是光滑弧面,火线电轨凹面底部中线设置5个漏水孔(89),火线电轨位于水泥槽截面中心,对地绝缘,有效防止路面雨水侵蚀,火线电轨的长度8米,火线电轨前、后下端设置前、后螺丝钉,导电槽架的槽口前、后端均设置螺孔,前火线电轨(90)的后螺丝钉装进导电槽架的前螺孔,后火线电轨(91)的前螺丝钉装进导电槽架的后螺孔,由前、后螺丝帽(92、93)将前、后火线电轨和导电槽架紧固在一起,前、后火线电轨前、后端接口均对齐、紧靠,所述导电槽架将所有地下电轨前、后端接口连接为导电状态,由无数独立的火线电轨连接成长距离火线电轨;所述水泥槽的上端设置无数个水泥预制的左、右盖板(94、95),所有左、右盖板的中线均制造左、右榫眼,所述水泥槽的上端制造无数个左、右榫头(96、97),所有左、右盖板的榫眼均与所有水泥槽的榫头对口,所有左、右盖板的前、后端接口均对齐、均与地面一平,连接成长距离左、右盖板;所述左、右盖板内侧的截面为三角形支撑体,左、右支撑体内端均制造左、右台阶,所述左、右台阶上面设置左、右接地电轨(98、99),所述接地电轨毎根8米,接地电轨为三角铁钢材,接地电轨前、后端设置前、后沉头螺丝钉孔,所述左、右台阶均设置安装孔,所述左、右台阶下面设置左、右导电板(100、101),左、右导电板前、后端设置螺丝钉孔,由左、右沉头螺丝钉(102、103)通过左、右接地电轨孔、左、右台阶安装孔、左、右导电板孔及左、右螺丝帽,将无数个接地电轨和导电板与左、右台阶紧固连接,所述导电板将所有接地电轨前、后端的接口连接为导电状态,所有左、右接地电轨的前、后端接口均对齐、均与地面一平,连接成长距离左、右接地电轨,长距离左、右接地电轨之间设置轨道槽口(104),所述轨道槽口的平行距离为3厘米,所述轨道槽口是所述导航受电刀的入口;在所述导航槽内部,所述火线电轨与左、右接地电轨之间平行距离的设定以及所述水泥槽空间大小的设定,应满足火线电轨与地之间在潮湿的条件下高电压的绝缘要求;所述导航槽设置在公交线路往返行驶的双向车道上,导航槽是封闭的环线,所述的公交线路上设置始发站和末发站,导航槽在始发站和末发站台的转弯轨迹是弧线,始发站和末发站之间设置若干不同地址的站台,始发站和末发站之间经过若干有红绿灯的十字路口,所述导航槽的轨迹在经过每一个公交站台时,导航槽靠近站台,导航槽靠近站台的转弯轨迹是弧线,所述导航路由器设置在水泥槽的左墙壁及左预制板下端,所述导航路由器内部设置宽带无线发射与接收电路、发射、接收天线、地址信号编码电路和红外发射电路,所述宽带无线发射与接收电路的输入端连接监控电脑网线,所述地址信号编码电路内部分别刻录不同的地址信息,所述导航路由器设置条形窗口,条形窗口内设置红外发射管一(105),所述红外发射电路输出端连接红外发射管一,所述导航受电刀左端中部设置红外接收管一,所述无人驾驶公交车行驶中,当红外接收管一接近红外发射管一时,所述红外发射管一发射的红外光照射红外接收管一,红外接收管一的输出端连接智能控制模块相关输入端,导航路由器地址信号通过红外接收管一传输到车载计算机。
4.根据权利要求1所述无人驾驶公交车,其特征在于:所述公交线路上的始发站附近设置供电监控站,所述供电监控站设置调度监控室和供电配电房,所述调度监控室里设置调度监控电脑,配电房设置配电柜,配电柜内交流电源的火线为供电火线,供电火线由地下电缆连接到所述火线电轨,配电柜内交流电源的地线为供电地线,供电地线由地下电缆连接到所述左、右接地电轨,配电柜交流电的电压值根据电动汽车技术标准设定,所述调度监控电脑设置电脑网线,电脑网线从地下连接所有导航路由器输入端,所述调度监控电脑的指挥人员,根据无人驾驶公交车的运行状况实时监控,可以对无人驾驶公交车进行人工操作。
5.根据权利要求1所述无人驾驶公交车,其特征在于:所述导航受电刀落入轨道槽口时,导航受电刀的接地滑轮支撑在所述轨道槽口,导航受电刀下端的所述火线炭刷与火线电轨上端的光滑弧面滑动接触,导航受电刀垂直于火线电轨时,所述减速电机停机,导航受电刀位置锁定,此时所述减速电机的下连接板翘起,所述减速电机的重力加上所述复位弹簧的拉力作用在接地滑轮上,所述接地滑轮的左、右导电锥体与所述左、右接地电轨的左、右棱角滚动接触,接触压强大,导电良好、可靠,所述火线炭刷依靠弹簧压力与所述地下电轨滑动连接,所述智能充电模块的电源线分别连接接地滑轮和火线炭刷,智能充电模块的输出线连接蓄电池组,实现所述无人驾驶公交车与导航槽的电源连接;所述无人驾驶公交车在行驶中左、右偏离路面中线一定范围时,导航受电刀跟随所述减速电机被迫左、右滑动,所述刀型骨架与所述轨道槽口保持平行,在轨道槽口左、右边处于滑动摩擦状态。
6.根据权利要求1所述无人驾驶公交车,其特征在于:所述无人驾驶公交车是在普通纯电动汽车基础上改造,其导航系统主要增加了导航控制箱和导航槽,利用导航槽导航的优点在于:结构简单、可靠性高、容易制造、成本低,不仅解决现有无人驾驶公交车视觉导航的可靠性问题以及成本问题,又解决纯电动汽车的供电问题,所述导航槽轨道槽口只有3厘米,槽口与路面一平,不影响城市道路十字路口或者人行横道上车辆及行人的通行,导航槽既不占用路面,又不影响交通,也不影响市容;所述无人驾驶公交车不仅能够为人们提供可靠的全自动智能化的公交服务,而且不用燃料,节能环保,不仅提高了社会、经济效益,更重要的是,城市空气污染、雾霾天气将会大大改善。
说明书
技术领域
本发明涉及一种无人驾驶汽车,确切的说,是一种无人驾驶公交车。
背景技术
目前,世界各国都在积极研发无人驾驶汽车,我国的无人驾驶公交车在复杂环境识别、智能行为决策和控制等方面实现了新的技术突破,已经达到世界先进水平,但是对于更为复杂的城市环境,无人驾驶公交车仍然存在行驶过程中视觉导航的可靠性问题、 多车调度和协调问题、 与其它交通参与者的交互问题、 成本问题,另外还有节能环保问题,使无人驾驶公交车大范围应用仍然存在一定困难。
发明内容
为了解决现有无人驾驶公交车视觉导航的可靠性问题,为了现有无人驾驶公交车更加节能环保,本发明公开一种利用导航槽导航的无人驾驶公交车。
所述无人驾驶公交车的技术方案由纯电动公交车、室外摄像机、室内摄像机、前左、右激光雷达、后左、右激光雷达、手动方向机、电动方向机、脚踏制动泵、电动制动泵、霍尔调速器、电动前门、电动后门、投币箱、刷卡机、语音播放器、车载计算机、蓄电池组、导航控制箱、左、右跟踪光头、导航槽、导航路由器、公交线路和供电监控站组成,其结构特点在于:所述无人驾驶公交车属于纯电动公交车,车后轮设置差速器,差速器上设置动力电机,车厢外顶部前端设置室外摄像机,车厢内顶部设置室内摄像机,车厢内左、右边设置语音播放器,车厢底层后面设置蓄电池组,车厢前的驾驶室仪表台左边设置车载计算机,车载计算机面板上设置模式转换开关和跟踪指示灯,车载计算机内设置智能控制模块、宽带通信接收、发射模块和智能充电模块;驾驶室左前方设置方向盘,方向盘下端连接方向杆,方向杆下端设置方向机,所述方向盘、方向杆以及方向机组成常规的手动方向机;所述方向机上端固定空心式蜗轮减速器,空心式蜗轮减速器左端设置伺服电机,空心式蜗轮减速器上端设置空心式电磁离合器,所述方向杆穿进空心式蜗轮减速器和空心式电磁离合器的中心孔,所述空心式蜗轮减速器、伺服电机、空心式电磁离合器以及方向机组成一体化的电动方向机;驾驶室左下端设置制动踏板,制动踏板上端设置脚踏制动泵,脚踏制动泵右侧设置电动制动泵,制动踏板右边设置调速踏板,调速踏板下端设置霍尔调速器;车辆前灯左、右端设置前左、右激光雷达,车辆后灯左、右端设置后左、右激光雷达,车厢右边设置电动前门和电动后门,电动前门和电动后门的上端设置前减速电机和后减速电机,电动前门后边设置投币箱,投币箱上端设置刷卡机;所述无人驾驶公交车底盘中部设置导航控制箱,导航控制箱下端设置窗口,所述窗口前下端设置左、右跟踪光头,窗口内设置导航受电刀,所述导航受电刀内部设置红外接收管一、下端设置火线炭刷、中部设置接地滑轮;所述无人驾驶公交车运行在城市公交线路上,所述公交线路设置始发站、末发站,所述公交线路是一条双向道路,双向道路的路面上设置导航槽,双向道路中间设置隔离栏,始发站、末发站之间的来往路线是循环的上、下单向道路,上单向道路的直行车道中线设置上导航槽,下单向道路的直行车道中线设置下导航槽,上导航槽的上端和下导航槽的下端,均设置若干不同地址的站台,所述的导航槽是上、下导航槽连接成封闭的导航槽环线,位于始发站、末发站以及各个站台的变道转弯的导航槽路线均为弧线,在上、下导航槽内部,位于始发站、末发站、十字路口、以及各个站台附近设置若干导航路由器,所述导航路由器内部设置宽带无线发射与接收电路、发射、接收天线、不同地址信息的编码电路和红外发射管一;所述导航槽平面上设置左、右接地电轨,所述左、右接地电轨之间设置轨道槽口,所述导航受电刀导入导航槽的轨道槽口,左、右接地电轨与导航受电刀的接地滑轮滚动连接;所述导航槽内中部设置火线电轨,火线电轨通过导航受电刀与所述火线炭刷滑动连接;在车载计算机的控制下,所述无人驾驶公交车沿所述导航槽的轨迹导航行驶,所述导航槽的轨迹是公交车从始发站到末发站来往行驶的封闭循环路线的轨迹,包括靠近公交站台时变道的轨迹和来往经过所有十字路口转弯变道的轨迹,所述公交线路上的始发站附近设置供电监控站,所述供电监控站设置调度监控室和供电室,所述调度监控室内设置监控电脑和电脑网线,所述供电室内设置交流电源以及供电火线和供电地线;所述智能控制模块设置若干输入、输出端,所述宽带通信接收、发射模块设置接收、发射天线,所述模式转换开关、左、右跟踪光头、红外接收管一、室外摄像机、室内摄像机、激光雷达、霍尔调速器的输出端分别连接智能控制模块的相关输入端,所述动力电机、伺服电机、空心式电磁离合器、跟踪指示灯、前减速电机、后减速电机、霍尔调速器、电动制动泵的负载端分别连接智能控制模块的相关输出端,所述室外摄像机、室内摄像机、语音播放器的输出端分别连接宽带通信接收、发射模块的相关输入端,所述调度监控室内的电脑网线连接导航槽内部所有的导航路由器的输入端,宽带通信接收、发射模块的输出端连接智能控制模块的相关输入端,车载计算机内部的宽带通信接收、发射模块的输入、输出端分别连接智能控制模块的相关输入、输出端,通过宽带通信发射、接收天线,所述调度监控室不仅能实时监控,而且可以遥控无人驾驶公交车;供电室内所述的供电火线经过地下电缆与导航槽内所述的火线电轨连接,供电室内所述的供电地线经过地下电缆与导航槽内所述的左、右接地电轨连接,所述火线炭刷、接地滑轮的输出线连接所述智能充电模块输入端,智能充电模块输出端连接所述蓄电池组;当所述模式转换开关切换在有人驾驶模式下,车载计算机控制所述空心式电磁离合器与所述方向杆分离,方向盘成为常规的手动方向机模式,驾驶室内制动踏板和调速踏板均成为常规的有人驾驶模式,所述跟踪指示灯工作在有人监控状态;当模式转换开关切换在无人驾驶模式下,车载计算机控制所述空心式电磁离合器与所述方向杆吸合,方向盘成为电动方向机模式,所述霍尔调速器、电动制动泵、电动前门和电动后门均由车载计算机控制,在导航槽的导航下,所述无人驾驶公交车沿所述导航槽的轨迹导航行驶,所述左、右跟踪光头探测轨道槽口的输出信号经过车载计算机识别后,控制所述电动方向机左、右转向,使左、右跟踪光头始终跟踪所述轨道槽口的轨迹,所述无人驾驶公交车根据激光雷达探测到的障碍物距离,室内摄像机拍摄的乘客图像识别信息,室外摄像机拍摄的交通红绿灯图像识别信息,各种信息通过车载计算机的计算、综合分析、比较、处理、准确控制无人驾驶公交车开门、关门、语音报站提示、起步、加速、减速、转弯和停车的一系列动作;导航受电刀的红外接收管一,接受每一个导航路由器红外发射管一照射后都要向车载计算机报告具体地址信息,车载计算机按照该地址信息以及各种传感器信息和程序对无人驾驶公交车进行智能化控制,比如到达各个站点准确停车、开、关车门、起步、加速,或者遇到红绿灯,摄像机图像识别红绿灯标志后,控制车辆停车、起步、加速;在无人驾驶模式下,所述的导航槽一方面给无人驾驶公交车导航,另一方面给无人驾驶公交车供电,所述供电室内交流电源的供电火线和供电地线经过所述火线电轨和所述左、右接地电轨连接到所述智能充电模块给所述蓄电池组充电;所述导航槽与所述供电监控站组成独立的某一路公交导航槽单元,在城市公交路线中,可以设置若干个所述公交导航槽单元。
所述无人驾驶公交车底盘中部设置矩形安装口,矩形安装口内安装导航控制箱,所述导航控制箱的外壳由上、下箱体连接成整体,所述上箱体下端口设置四边形的上连接边,所述下箱体上端口设置四边形的下连接边,所述上、下连接边四周均设置若干连接孔,由若干螺丝钉将上、下连接边紧固在所述矩形安装口四周的螺母孔内,所述下箱体的前左、右端设置左、右轴孔,左、右轴孔内紧配合安装水平滑轴,水平滑轴上设置长轴承架,长轴承架左端内圆设置左双向轴承、右端内圆设置右双向轴承,所述左、右双向轴承在水平滑轴上无论是旋转或者是水平直线运动,左、右双向轴承均处于滚动摩擦状态,阻力很小,所述长轴承架左、右上端焊接n型支架,n型支架后上端设置三角形的上连接板,上连接板后端设置轴承架及上轴承;所述长轴承架左、右下端焊接u型支架,u型支架后下端设置三角形的下连接板,下连接板后端设置轴承架及下轴承,所述上、下轴承内圆安装立轴,立轴中部安装减速电机,所述减速电机设置蜗轮、蜗杆减速器,所述蜗轮、蜗杆减速器设置减速机架,所述减速机架前端设置立轴套,立轴套内圆与所述立轴紧配合安装,减速机架的后端设置驱动电机,所述立轴套前端设置复位杆,复位杆前端设置复位弹簧,复位弹簧前端挂在所述下箱体下端的内前端,所述减速机架、立轴套及复位杆是一体化的铝合金铸件,所述减速电机不仅能够围绕所述立轴左、右旋转,又能围绕所述水平滑轴上、下旋转和左、右平移,所述减速电机的重力使所述下连接板落在下箱体的底部,所述减速电机在左、右外力作用下,能够在水平滑轴的左、右端范围内水平位移,减速电机在没有其他外力作用下,复位弹簧的拉力使减速电机保持在水平滑轴的中间位置,使复位杆保持在拉直状态;所述减速机架中部设置轴承架,轴承架内圆设置左、右轴承,所述蜗轮、蜗杆减速器设置驱动轴,所述驱动轴安装在所述左、右轴承内圆,所述驱动轴右端安装导航受电刀,所述导航受电刀设置刀型骨架,所述刀型骨架是用高强度塑料制造的注塑件,刀型骨架厚度为2.5厘米,刀型骨架上端设置轴孔,轴孔与驱动轴紧配合安装,刀型骨架中部设置轮圈架,刀型骨架中下部设置红外接收管一,刀型骨架下端设置炭刷架,所述刀型骨架、轮圈架和炭刷架内部均设置线路通道,炭刷架内上端设置弹簧、下端设置火线炭刷,火线炭刷上端设置输出火线,输出火线经过所述线路通道连接到所述智能充电模块的火线输入端,所述红外接收管一的输出线,经过所述线路通道连接所述智能控制模块相关输入端;所述轮圈架左、右端设置左、右导电轮架,所述左、右导电轮架为扇形,选用弹性铜片制造,所述轮圈架中心设置接地滑轮,所述接地滑轮的直径截面为菱形,接地滑轮设置左、右导电锥体,接地滑轮中心设置滚针轴承及轮轴,所述轮轴两端安装在左、右导电轮架下端轴孔内,支撑接地滑轮,所述左、右导电轮架与所述左、右导电锥体两端是弹性接触,接地滑轮转动时,接地滑轮与左、右导电轮架滑动连接在导电状态,左、右导电轮架上端连接输出地线,输出地线经过所述线路通道连接到所述智能充电模块地线输入端,智能充电模块输出端连接到所述蓄电池组;所述无人驾驶公交车由驾驶员操作时,所述模式转换开关切换在有人驾驶模式,所述模式转换开关输出电信号到智能控制模块相关输入端,智能控制模块某输出端负电压到驱动电机,所述驱动电机反转,驱动导航受电刀向后、向上抬起;所述蓄电池组前端车底盘下设置霍尔传感器,导航受电刀后端设置柱型永磁体一,当导航受电刀抬高到柱型永磁体一接触到霍尔传感器时,霍尔传感器输出电信号到智能控制模块相关输入端,智能控制模块某输出端零电压到所述驱动电机,使导航受电刀停止在收藏状态;所述导航控制箱的下箱体下端中部设置窗口,下箱体后下端中部也设置窗口,所述窗口的宽度是无人驾驶公交车行驶中左、右偏离车道中线的活动范围,所述窗口前下端中部设置左、右跟踪光头,所述左、右跟踪光头是光反馈传感器,光头之间距离略小于3厘米,所述轨道槽口平行距离为3厘米,当驾驶员将无人驾驶公交车行驶在车道中线,左、右光头的光束照射在轨道槽口左、右端时,左、右跟踪光头输出电信号到智能控制模块相关输入端,智能控制模块某输出端信号电压到驾驶室跟踪指示灯,所述跟踪指示灯亮,提示驾驶员导航受电刀已经对准了轨道槽口,此时驾驶员将模式转换开关切换在无人驾驶模式,智能控制模块某输出端正电压到所述驱动电机,所述驱动电机正转,驱动导航受电刀导向所述轨道槽口,导航受电刀的宽度略小于轨道槽口的宽度,使导航受电刀准确、可靠地导入轨道槽口;所述导航控制箱的下箱体左下端设置红外发射管二、右下端设置红外接收管二,红外发射管二光束照射红外接收管二,当所述导航受电刀导入所述轨道槽口后接近垂直时,导航受电刀遮挡红外发射管二的光束,导致红外接收管二输出电信号到智能控制模块相关输入端,智能控制模块某输出端零电压到所述驱动电机,导航受电刀立即停止,所述蜗轮、蜗杆减速器停止时具有锁定功能,此时自动受电刀稳定在接近垂直状态,所述火线炭刷与所述火线电轨接触,所述接地滑轮的左、右导电锥体与所述左、右接地电轨的左、右棱角接触;在车辆沿所述导航槽的轨迹直线行驶的过程中,所述左、右跟踪光头探测到的偏离导航槽的信号经过车载计算机识别后,控制所述电动方向机左、右转向,使车载计算机在轨道槽口的小范围内纠正车辆偏离导航槽的方向;所述导航控制箱的上箱体内上端设置左霍尔传感器和右霍尔传感器,所述减速电机的上连接板左上端设置柱型永磁体二,在车辆行驶的过程中,沿所述导航槽的轨迹遇到导航槽向左转弯变道的弧线时,柱型永磁体二接近左霍尔传感器,所述左霍尔传感器输出偏离导航槽的信号到智能控制模块相关输入端,智能控制模块某输出端正电压到伺候电机,所述伺候电机正转,控制所述电动方向机左转向,遇到导航槽向右转弯变道的弧线时,柱型永磁体二接近右霍尔传感器,所述右霍尔传感器输出偏离导航槽的信号到智能控制模块相关输入端,智能控制模块某输出端负电压到伺候电机,所述伺候电机反转,控制所述电动方向机右转向,使车载计算机在所述窗口的大范围内纠正车辆偏离导航槽的方向。
所述无人驾驶公交车设置导航槽,所述导航槽由水泥槽、水沟台、排水沟、绝缘柱、导电槽架、火线电轨、左、右盖板、左、右接地电轨、轨道槽口组成,所述导航槽设置在城市交通任何一路循环行驶的公交线路上,所述的公交线路为双向道路,每条单向道路又分左转车道、直行车道、右转车道,所述导航槽设置在直行车道或者变道路面的中线区域,所述中线区域的路面开挖成长壕沟,长壕沟内设置水泥槽,所述水泥槽的长度2倍于所述单向道路的长度,水泥槽底部中线设置水沟台,水沟台左、右侧是排水沟,水沟台上端设置无数个绝缘柱,绝缘柱选用高压线瓷瓶,绝缘柱之间的距离均为8米,绝缘柱上端均设置导电槽架,导电槽架下端中央设置凹面,凹面与所述高压线瓷瓶上端吻合,用A、B胶将导电槽架与高压线瓷瓶粘连为一体;绝缘柱下端均固定连接板,连接板均固定在水沟台上预设的无数个左、右螺丝钉上;所述导电槽架向上的槽口为弧形,槽口上前、后端均安装火线电轨,所述火线电轨的截面为弧形,火线电轨上端的凹面是光滑弧面,火线电轨凹面底部中线设置5个漏水孔,火线电轨位于水泥槽截面中心,对地绝缘,有效防止路面雨水侵蚀,火线电轨的长度8米,火线电轨前、后下端设置前、后螺丝钉,导电槽架的槽口前、后端均设置螺孔,前火线电轨的后螺丝钉装进导电槽架的前螺孔,后火线电轨的前螺丝钉装进导电槽架的后螺孔,由前、后螺丝帽将前、后火线电轨和导电槽架紧固在一起,前、后火线电轨前、后端接口均对齐、紧靠,所述导电槽架将所有地下电轨前、后端接口连接为导电状态,由无数独立的火线电轨连接成长距离火线电轨;所述水泥槽的上端设置无数个水泥预制的左、右盖板,所有左、右盖板的中线均制造左、右榫眼,所述水泥槽的上端制造无数个左、右榫头,所有左、右盖板的榫眼均与所有水泥槽的榫头对口,所有左、右盖板的前、后端接口均对齐、均与地面一平,连接成长距离左、右盖板;所述左、右盖板内侧的截面为三角形支撑体,左、右支撑体内端均制造左、右台阶,所述左、右台阶上面设置左、右接地电轨,所述接地电轨毎根8米,接地电轨为三角铁钢材,接地电轨前、后端设置前、后沉头螺丝钉孔,所述左、右台阶均设置安装孔,所述左、右台阶下面设置左、右导电板,左、右导电板前、后端设置螺丝钉孔,由左、右沉头螺丝钉通过左、右接地电轨孔、左、右台阶安装孔、左、右导电板孔及左、右螺丝帽,将无数个接地电轨和导电板与左、右台阶紧固连接,所述导电板将所有接地电轨前、后端的接口连接为导电状态,所有左、右接地电轨的前、后端接口均对齐、均与地面一平,连接成长距离左、右接地电轨,长距离左、右接地电轨之间设置轨道槽口,所述轨道槽口的平行距离为3厘米,所述轨道槽口是所述导航受电刀的入口;在所述导航槽内部,所述火线电轨与左、右接地电轨之间平行距离的设定以及所述水泥槽空间大小的设定,应满足火线电轨与地之间在潮湿的条件下高电压的绝缘要求;所述导航槽设置在公交线路往返行驶的双向车道上,导航槽是封闭的环线,所述的公交线路上设置始发站和末发站,导航槽在始发站和末发站台的转弯轨迹是弧线,始发站和末发站之间设置若干不同地址的站台,始发站和末发站之间经过若干有红绿灯的十字路口,所述导航槽的轨迹在经过每一个公交站台时,导航槽靠近站台,导航槽靠近站台的转弯轨迹是弧线,所述导航路由器设置在水泥槽的左墙壁及左预制板下端,所述导航路由器内部设置宽带无线发射与接收电路、发射、接收天线、地址信号编码电路和红外发射电路,所述宽带无线发射与接收电路的输入端连接监控电脑网线,所述地址信号编码电路内部分别刻录不同的地址信息,所述导航路由器设置条形窗口,条形窗口内设置红外发射管一,所述红外发射电路输出端连接红外发射管一,所述导航受电刀左端中部设置红外接收管一,所述无人驾驶公交车行驶中,当红外接收管一接近红外发射管一时,所述红外发射管一发射的红外光照射红外接收管一,红外接收管一的输出端连接智能控制模块相关输入端,导航路由器地址信号通过红外接收管一传输到车载计算机。
所述公交线路上的始发站附近设置供电监控站,所述供电监控站设置调度监控室和供电配电房,所述调度监控室里设置调度监控电脑,配电房设置配电柜,配电柜内交流电源的火线为供电火线,供电火线由地下电缆连接到所述火线电轨,配电柜内交流电源的地线为供电地线,供电地线由地下电缆连接到所述左、右接地电轨,配电柜交流电的电压值根据电动汽车技术标准设定,所述调度监控电脑设置电脑网线,电脑网线从地下连接所有导航路由器输入端,所述调度监控电脑的指挥人员,根据无人驾驶公交车的运行状况实时监控,可以对无人驾驶公交车进行人工操作。
所述导航受电刀落入轨道槽口时,导航受电刀的接地滑轮支撑在所述轨道槽口,导航受电刀下端的所述火线炭刷与火线电轨上端的光滑弧面滑动接触,导航受电刀垂直于火线电轨时,所述减速电机停机,导航受电刀位置锁定,此时所述减速电机的下连接板翘起,所述减速电机的重力加上所述复位弹簧的拉力作用在接地滑轮上,所述接地滑轮的左、右导电锥体与所述左、右接地电轨的左、右棱角滚动接触,接触压强大,导电良好、可靠,所述火线炭刷依靠弹簧压力与所述地下电轨滑动连接,所述智能充电模块的电源线分别连接接地滑轮和火线炭刷,智能充电模块的输出线连接蓄电池组,实现所述无人驾驶公交车与导航槽的电源连接;所述无人驾驶公交车在行驶中左、右偏离路面中线一定范围时,导航受电刀跟随所述减速电机被迫左、右滑动,所述刀型骨架与所述轨道槽口保持平行,在轨道槽口左、右边处于滑动摩擦状态。
所述无人驾驶公交车的有益效果在于:所述无人驾驶公交车是在普通纯电动汽车基础上改造,其导航系统主要增加了导航控制箱和导航槽,利用导航槽导航的优点在于:结构简单、可靠性高、容易制造、成本低,不仅解决现有无人驾驶公交车视觉导航的可靠性问题以及成本问题,又解决纯电动汽车的供电问题,所述导航槽轨道槽口只有3厘米,槽口与路面一平,不影响城市道路十字路口或者人行横道上车辆及行人的通行,导航槽既不占用路面,又不影响交通,也不影响市容;所述无人驾驶公交车不仅能够为人们提供可靠的全自动智能化的公交服务,而且不用燃料,节能环保,不仅提高了社会、经济效益,更重要的是,城市空气污染、雾霾天气将会大大改善。
附图说明
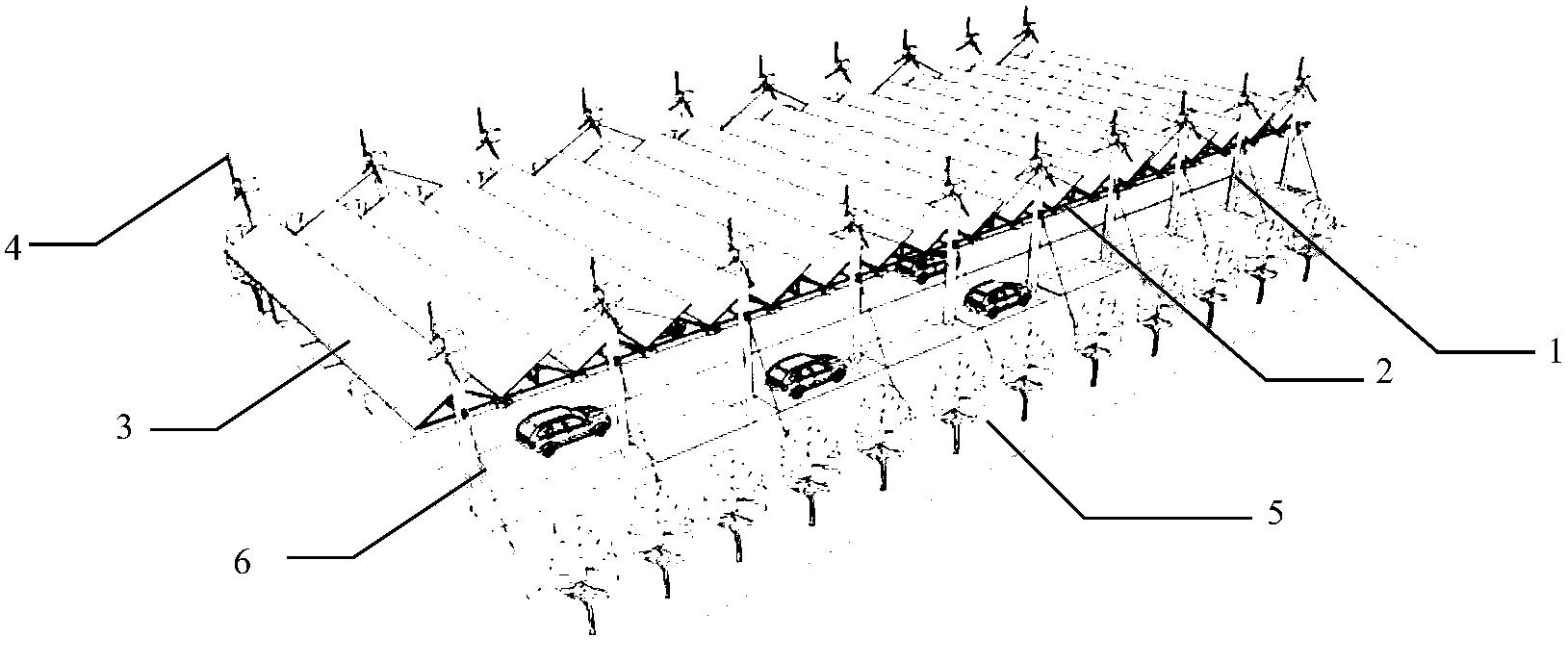
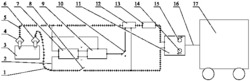
图1为无人驾驶公交车右视整体结构示意图。
图2为无人驾驶公交车导航槽路线结构示意图。
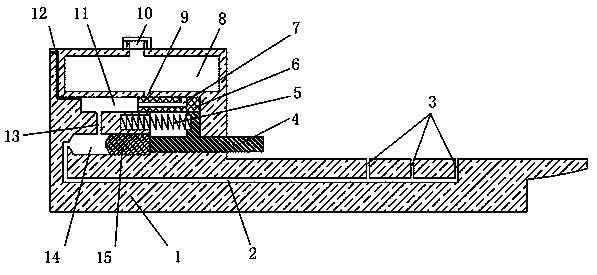
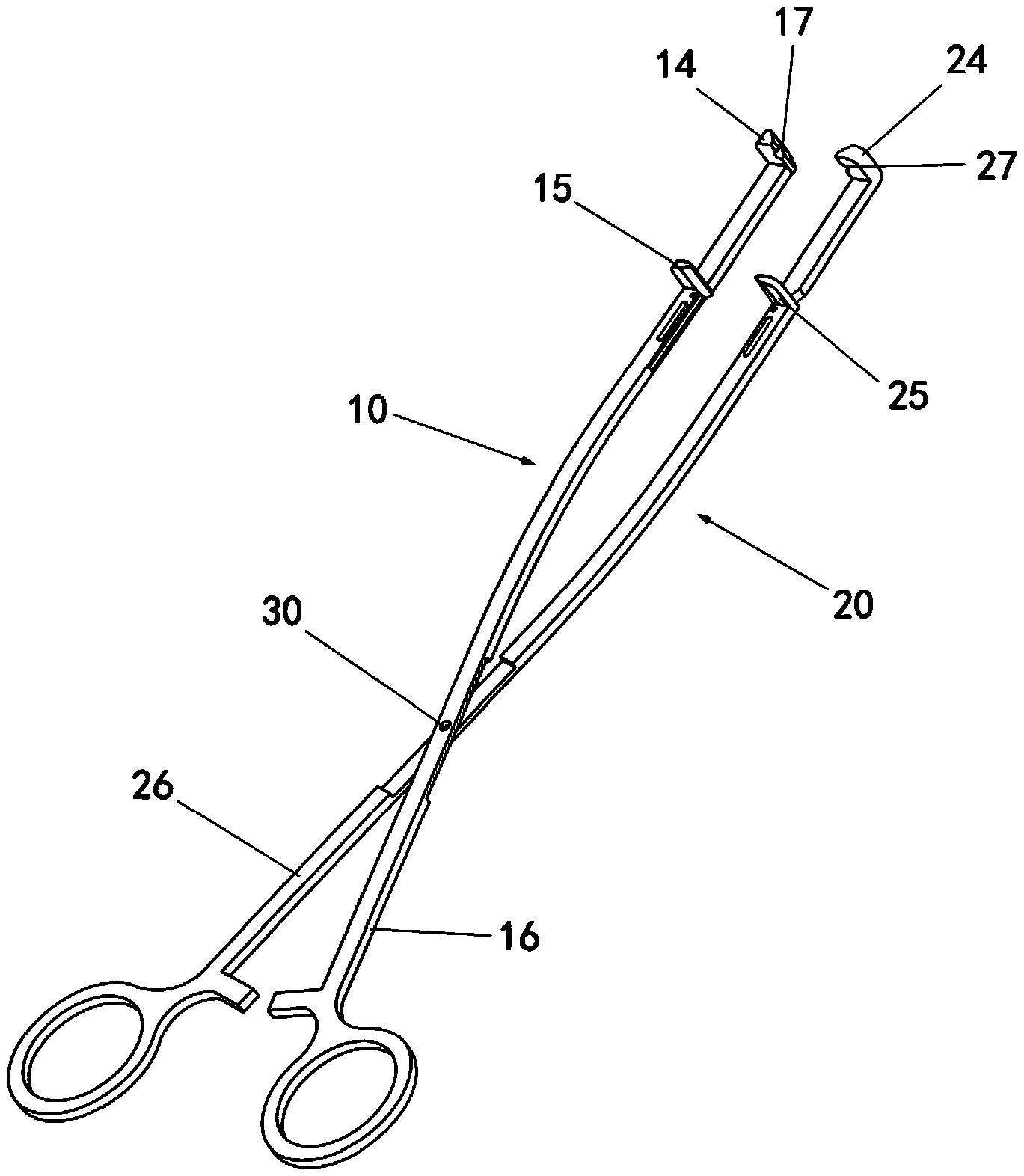
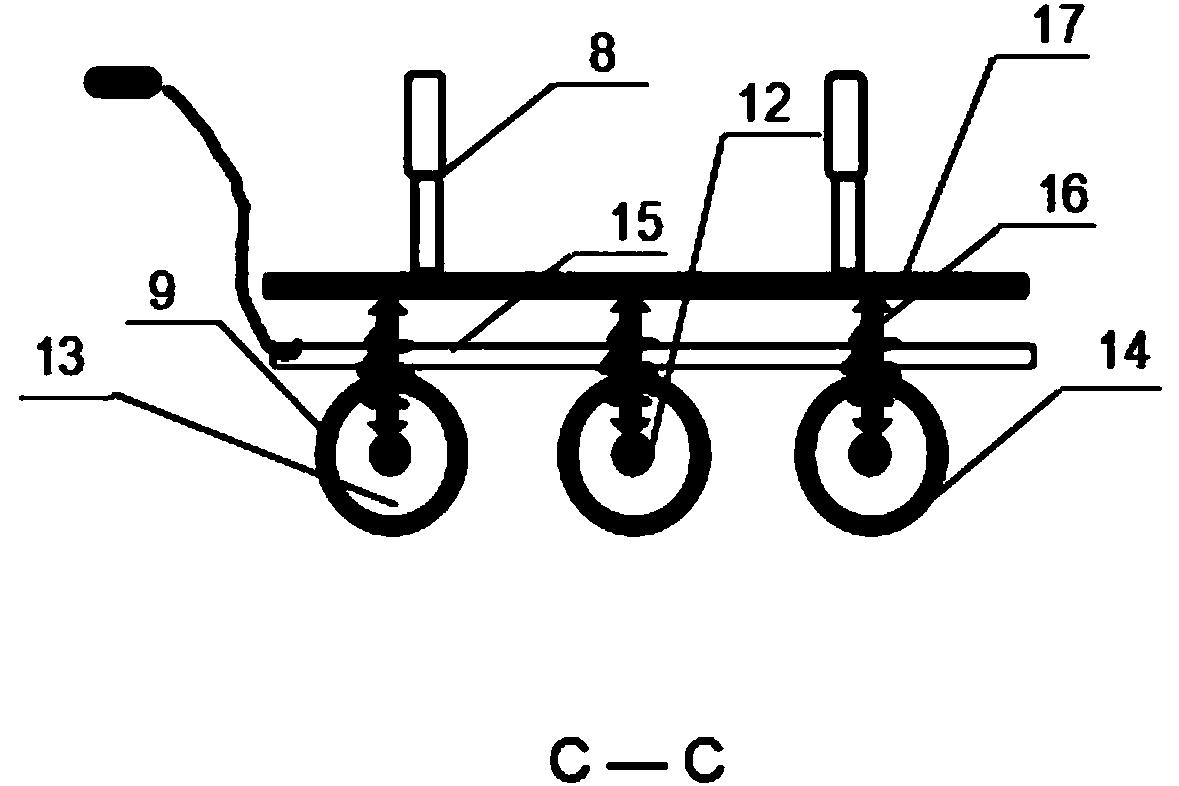
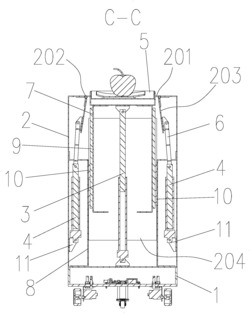
图3为导航控制箱后视结构示意图。
图4为导航控制箱右视结构示意图。
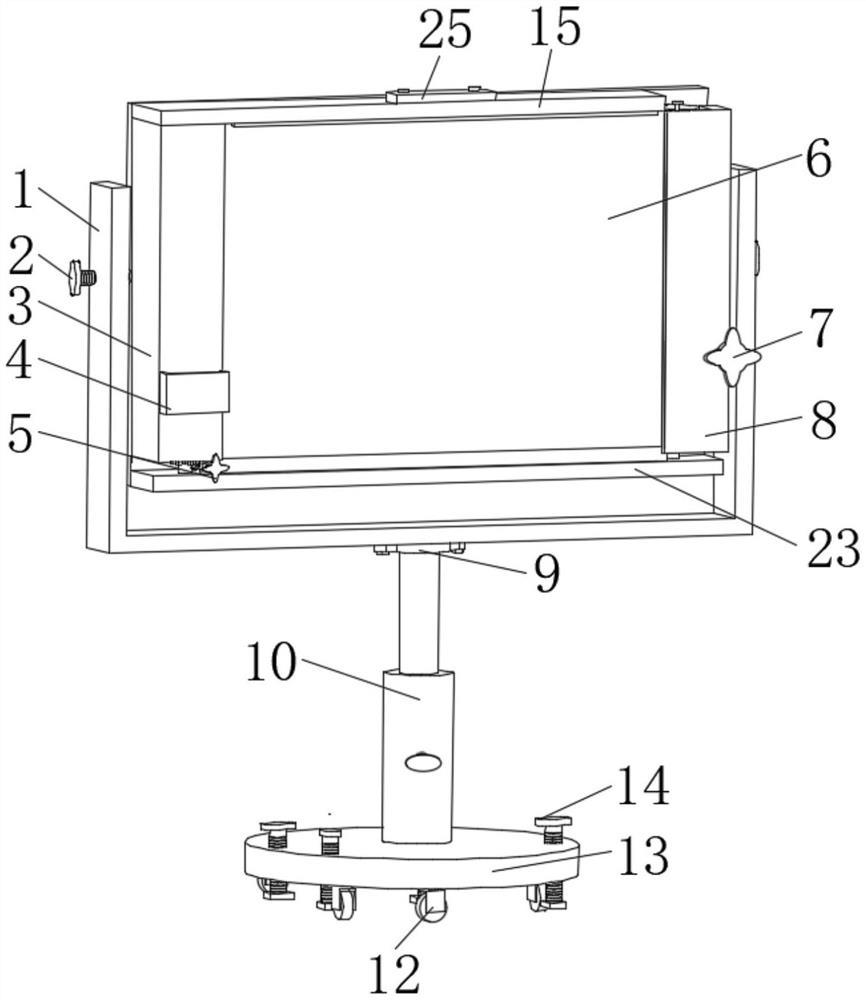
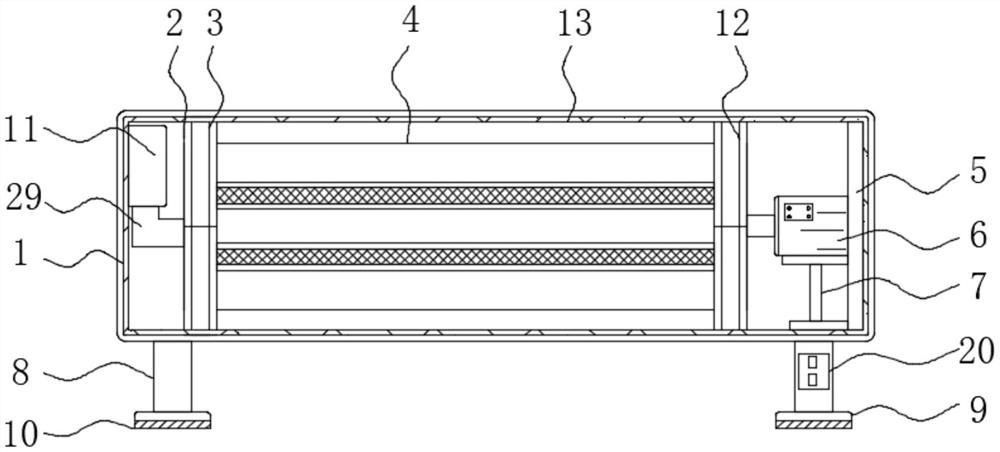
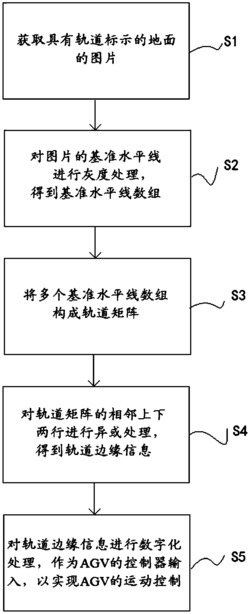
图5为导航槽后视结构示意图。
图6为导航槽右视结构示意图。
具体实施方式
下面结合附图作进一歩说明。
在图1、图2中,所述无人驾驶公交车属于纯电动公交车,车后轮设置差速器1,差速器上设置动力电机2,车厢外顶部前端设置室外摄像机3,车厢内顶部设置室内摄像机4,车厢内左、右边设置语音播放器5,车厢底层后面设置蓄电池组6,车厢前的驾驶室仪表台左边设置车载计算机7,车载计算机面板上设置模式转换开关8和跟踪指示灯9,车载计算机内设置智能控制模块、宽带通信接收、发射模块和智能充电模块;驾驶室左前方设置方向盘10,方向盘下端连接方向杆11,方向杆下端设置方向机12,所述方向盘、方向杆以及方向机组成常规的手动方向机;所述方向机上端固定空心式蜗轮减速器13,空心式蜗轮减速器左端设置伺服电机14,空心式蜗轮减速器上端设置空心式电磁离合器15,所述方向杆穿进空心式蜗轮减速器和空心式电磁离合器的中心孔,所述空心式蜗轮减速器、伺服电机、空心式电磁离合器以及方向机组成一体化的电动方向机;驾驶室左下端设置制动踏板16,制动踏板上端设置脚踏制动泵17,脚踏制动泵右侧设置电动制动泵18,制动踏板右边设置调速踏板19,调速踏板下端设置霍尔调速器20;车辆前灯左、右端设置前左、右激光雷达21,车辆后灯左、右端设置后左、右激光雷达22,车厢右边设置电动前门23和电动后门24,电动前门和电动后门的上端设置前减速电机25和后减速电机26,电动前门后边设置投币箱27,投币箱上端设置刷卡机28;所述无人驾驶公交车底盘中部设置导航控制箱29,导航控制箱下端设置窗口,所述窗口前下端设置左、右跟踪光头,窗口内设置导航受电刀30,所述导航受电刀内部设置红外接收管一、下端设置火线炭刷、中部设置接地滑轮;所述无人驾驶公交车运行在城市公交线路上,所述公交线路设置始发站31、末发站32,所述公交线路是一条双向道路,双向道路的路面上设置导航槽33,双向道路中间设置隔离栏34,始发站、末发站之间的来往路线是循环的上、下单向道路35、36,上单向道路的直行车道中线设置上导航槽,下单向道路的直行车道中线设置下导航槽,上导航槽的上端和下导航槽的下端,均设置若干不同地址的站台37,所述的导航槽是上、下导航槽连接成封闭的导航槽环线,位于始发站、末发站以及各个站台的变道转弯的导航槽路线均为弧线,在上、下导航槽内部,位于始发站、末发站、十字路口、以及各个站台附近设置若干导航路由器38,所述导航路由器内部设置宽带无线发射与接收电路、发射、接收天线、不同地址信息的编码电路和红外发射管一;所述导航槽平面上设置左、右接地电轨,所述左、右接地电轨之间设置轨道槽口,所述导航受电刀导入导航槽的轨道槽口,左、右接地电轨与导航受电刀的接地滑轮滚动连接;所述导航槽内中部设置火线电轨,火线电轨通过导航受电刀与所述火线炭刷滑动连接;在车载计算机的控制下,所述无人驾驶公交车沿所述导航槽的轨迹导航行驶,所述导航槽的轨迹是公交车从始发站到末发站来往行驶的封闭循环路线的轨迹,包括靠近公交站台时变道的轨迹和来往经过所有十字路口转弯变道的轨迹,所述公交线路上的始发站附近设置供电监控站39,所述供电监控站设置调度监控室和供电室,所述调度监控室内设置监控电脑和电脑网线,所述供电室内设置交流电源以及供电火线和供电地线;所述智能控制模块设置若干输入、输出端,所述宽带通信接收、发射模块设置接收、发射天线,所述模式转换开关、左、右跟踪光头、红外接收管一、室外摄像机、室内摄像机、激光雷达、霍尔调速器的输出端分别连接智能控制模块的相关输入端,所述动力电机、伺服电机、空心式电磁离合器、跟踪指示灯、前减速电机、后减速电机、霍尔调速器、电动制动泵的负载端分别连接智能控制模块的相关输出端,所述室外摄像机、室内摄像机、语音播放器的输出端分别连接宽带通信接收、发射模块的相关输入端,所述调度监控室内的电脑网线连接导航槽内部所有的导航路由器的输入端,车载计算机内部的宽带通信接收、发射模块的输入、输出端分别连接智能控制模块的相关输入、输出端,通过宽带通信发射、接收天线,所述调度监控室不仅能实时监控,而且可以遥控无人驾驶公交车;供电室内所述的供电火线经过地下电缆与导航槽内所述的火线电轨连接,供电室内所述的供电地线经过地下电缆与导航槽内所述的左、右接地电轨连接,所述火线炭刷、接地滑轮的输出线连接所述智能充电模块输入端,智能充电模块输出端连接所述蓄电池组;当所述模式转换开关切换在有人驾驶模式下,车载计算机控制所述空心式电磁离合器与所述方向杆分离,方向盘成为常规的手动方向机模式,驾驶室内制动踏板和调速踏板均成为常规的有人驾驶模式,所述跟踪指示灯工作在有人监控状态;当模式转换开关切换在无人驾驶模式下,车载计算机控制所述空心式电磁离合器与所述方向杆吸合,方向盘成为电动方向机模式,所述霍尔调速器、电动制动泵、电动前门和电动后门均由车载计算机控制,在导航槽的导航下,所述无人驾驶公交车沿所述导航槽的轨迹导航行驶,所述左、右跟踪光头探测轨道槽口的输出信号经过车载计算机识别后,控制所述电动方向机左、右转向,使左、右跟踪光头始终跟踪所述轨道槽口的轨迹,所述无人驾驶公交车根据激光雷达探测到的障碍物距离,室内摄像机拍摄的乘客图像识别信息,室外摄像机拍摄的交通红绿灯图像识别信息,各种信息通过车载计算机的计算、综合分析、比较、处理、准确控制无人驾驶公交车开门、关门、语音报站提示、起步、加速、减速、转弯和停车的一系列动作;导航受电刀的红外接收管一,接受每一个导航路由器红外发射管一照射后都要向车载计算机报告具体地址信息,车载计算机按照该地址信息以及各种传感器信息和程序对无人驾驶公交车进行智能化控制,比如到达各个站点准确停车、开、关车门、起步、加速,或者遇到红绿灯,摄像机图像识别红绿灯标志后,控制车辆停车、起步、加速;在无人驾驶模式下,所述的导航槽一方面给无人驾驶公交车导航,另一方面给无人驾驶公交车供电,所述供电室内交流电源的供电火线和供电地线经过所述火线电轨和所述左、右接地电轨连接到所述智能充电模块给所述蓄电池组充电;所述导航槽与所述供电监控站组成独立的某一路公交导航槽单元,在城市公交路线中,可以设置若干个所述公交导航槽单元。
在图3、图4中,所述无人驾驶公交车底盘中部设置矩形安装口,矩形安装口内安装导航控制箱,所述导航控制箱的外壳由上、下箱体连接成整体,所述上箱体40下端口设置四边形的上连接边,所述下箱体41上端口设置四边形的下连接边,所述上、下连接边四周均设置若干连接孔,由若干螺丝钉42将上、下连接边紧固在所述矩形安装口四周的螺母孔内,所述下箱体的前左、右端设置左、右轴孔,左、右轴孔内紧配合安装水平滑轴43,水平滑轴上设置长轴承架44,长轴承架左端内圆设置左双向轴承45、右端内圆设置右双向轴承46,所述左、右双向轴承在水平滑轴上无论是旋转或者是水平直线运动,左、右双向轴承均处于滚动摩擦状态,阻力很小,所述长轴承架左、右上端焊接n型支架47,n型支架后上端设置三角形的上连接板48,上连接板后端设置轴承架及上轴承49;所述长轴承架左、右下端焊接u型支架50,u型支架后下端设置三角形的下连接板51,下连接板后端设置轴承架及下轴承52,所述上、下轴承内圆安装立轴53,立轴中部安装减速电机,所述减速电机设置蜗轮、蜗杆减速器54,所述蜗轮、蜗杆减速器设置减速机架55,所述减速机架前端设置立轴套,立轴套内圆与所述立轴紧配合安装,减速机架的后端设置驱动电机56,所述立轴套前端设置复位杆57,复位杆前端设置复位弹簧58,复位弹簧前端挂在所述下箱体下端的内前端,所述减速机架、立轴套及复位杆是一体化的铝合金铸件,所述减速电机不仅能够围绕所述立轴左、右旋转,又能围绕所述水平滑轴上、下旋转和左、右平移,所述减速电机的重力使所述下连接板落在下箱体的底部,所述减速电机在左、右外力作用下,能够在水平滑轴的左、右端范围内水平位移,减速电机在没有其他外力作用下,复位弹簧的拉力使减速电机保持在水平滑轴的中间位置,使复位杆保持在拉直状态;所述减速机架中部设置轴承架,轴承架内圆设置左、右轴承59、60,所述蜗轮、蜗杆减速器设置驱动轴61,所述驱动轴安装在所述左、右轴承内圆,所述驱动轴右端安装导航受电刀,所述导航受电刀设置刀型骨架62,所述刀型骨架是用高强度塑料制造的注塑件,刀型骨架厚度为2.5厘米,刀型骨架上端设置轴孔,轴孔与驱动轴紧配合安装,刀型骨架中部设置轮圈架63,刀型骨架中下部设置红外接收管一64,刀型骨架下端设置炭刷架,所述刀型骨架、轮圈架和炭刷架内部均设置线路通道,炭刷架内上端设置弹簧65、下端设置火线炭刷66,火线炭刷上端设置输出火线,输出火线经过所述线路通道连接到所述智能充电模块的火线输入端,所述红外接收管一的输出线,经过所述线路通道连接所述智能控制模块相关输入端;所述轮圈架左、右端设置左、右导电轮架67、68,所述左、右导电轮架为扇形,选用弹性铜片制造,所述轮圈架中心设置接地滑轮69,所述接地滑轮的直径截面为菱形,接地滑轮设置左、右导电锥体,接地滑轮中心设置滚针轴承及轮轴,所述轮轴两端安装在左、右导电轮架下端轴孔内,支撑接地滑轮,所述左、右导电轮架与所述左、右导电锥体两端是弹性接触,接地滑轮转动时,接地滑轮与左、右导电轮架滑动连接在导电状态,左、右导电轮架上端连接输出地线,输出地线经过所述线路通道连接到所述智能充电模块地线输入端,智能充电模块输出端连接到所述蓄电池组;所述无人驾驶公交车由驾驶员操作时,所述模式转换开关切换在有人驾驶模式,所述模式转换开关输出电信号到智能控制模块相关输入端,智能控制模块某输出端负电压到驱动电机,所述驱动电机反转,驱动导航受电刀向后、向上抬起;所述蓄电池组前端车底盘下设置霍尔传感器70,导航受电刀后端设置柱型永磁体一71,当导航受电刀抬高到柱型永磁体一接触到霍尔传感器时,霍尔传感器输出电信号到智能控制模块相关输入端,智能控制模块某输出端零电压到所述驱动电机,使导航受电刀停止在收藏状态;所述导航控制箱的下箱体下端中部设置窗口72,下箱体后下端中部也设置窗口,所述窗口的宽度是无人驾驶公交车行驶中左、右偏离车道中线的活动范围,所述窗口前下端中部设置左、右跟踪光头73、74,所述左、右跟踪光头是光反馈传感器,光头之间距离略小于3厘米,所述轨道槽口平行距离为3厘米,当驾驶员将无人驾驶公交车行驶在车道中线,左、右光头的光束照射在轨道槽口左、右端时,左、右跟踪光头输出电信号到智能控制模块相关输入端,智能控制模块某输出端信号电压到驾驶室跟踪指示灯,所述跟踪指示灯亮,提示驾驶员导航受电刀已经对准了轨道槽口,此时驾驶员将模式转换开关切换在无人驾驶模式,智能控制模块某输出端正电压到所述驱动电机,所述驱动电机正转,驱动导航受电刀导向所述轨道槽口,导航受电刀的宽度略小于轨道槽口的宽度,使导航受电刀准确、可靠地导入轨道槽口;所述导航控制箱的下箱体左下端设置红外发射管二75、右下端设置红外接收管二76,红外发射管二光束照射红外接收管二,当所述导航受电刀导入所述轨道槽口后接近垂直时,导航受电刀遮挡红外发射管二的光束,导致红外接收管二输出电信号到智能控制模块相关输入端,智能控制模块某输出端零电压到所述驱动电机,导航受电刀立即停止,所述蜗轮、蜗杆减速器停止时具有锁定功能,此时自动受电刀稳定在接近垂直状态,所述火线炭刷与所述火线电轨接触,所述接地滑轮的左、右导电锥体与所述左、右接地电轨的左、右棱角接触;在车辆沿所述导航槽的轨迹直线行驶的过程中,所述左、右跟踪光头探测到的偏离导航槽的信号经过车载计算机识别后,控制所述电动方向机左、右转向,使车载计算机在轨道槽口的小范围内纠正车辆偏离导航槽的方向;所述导航控制箱的上箱体内上端设置左霍尔传感器77和右霍尔传感器78,所述减速电机的上连接板左上端设置柱型永磁体二79,在车辆行驶的过程中,沿所述导航槽的轨迹遇到导航槽向左转弯变道的弧线时,柱型永磁体二接近左霍尔传感器,所述左霍尔传感器输出偏离导航槽的信号到智能控制模块相关输入端,智能控制模块某输出端正电压到伺候电机,所述伺候电机正转,控制所述电动方向机左转向,遇到导航槽向右转弯变道的弧线时,柱型永磁体二接近右霍尔传感器,所述右霍尔传感器输出偏离导航槽的信号到智能控制模块相关输入端,智能控制模块某输出端负电压到伺候电机,所述伺候电机反转,控制所述电动方向机右转向,使车载计算机在所述窗口的大范围内纠正车辆偏离导航槽的方向。
在图5、图6中,所述无人驾驶公交车设置导航槽,所述导航槽由水泥槽、水沟台、排水沟、绝缘柱、导电槽架、火线电轨、左、右盖板、左、右接地电轨、轨道槽口组成,所述导航槽设置在城市交通任何一路循环行驶的公交线路上,所述的公交线路为双向道路,每条单向道路又分左转车道、直行车道、右转车道,所述导航槽设置在直行车道或者变道路面的中线区域,所述中线区域的路面开挖成长壕沟,长壕沟内设置水泥槽80,所述水泥槽的长度2倍于所述单向道路的长度,水泥槽底部中线设置水沟台81,水沟台左、右侧是排水沟82、83,水沟台上端设置无数个绝缘柱84,绝缘柱选用高压线瓷瓶,绝缘柱之间的距离均为8米,绝缘柱上端均设置导电槽架85,导电槽架下端中央设置凹面,凹面与所述高压线瓷瓶上端吻合,用A、B胶将导电槽架与高压线瓷瓶粘连为一体;绝缘柱下端均固定连接板86,连接板均固定在水沟台上预设的无数个左、右螺丝钉87、88上;所述导电槽架向上的槽口为弧形,槽口上前、后端均安装火线电轨,所述火线电轨的截面为弧形,火线电轨上端的凹面是光滑弧面,火线电轨凹面底部中线设置5个漏水孔89,火线电轨位于水泥槽截面中心,对地绝缘,有效防止路面雨水侵蚀,火线电轨的长度8米,火线电轨前、后下端设置前、后螺丝钉,导电槽架的槽口前、后端均设置螺孔,前火线电轨90的后螺丝钉装进导电槽架的前螺孔,后火线电轨91的前螺丝钉装进导电槽架的后螺孔,由前、后螺丝帽92、93将前、后火线电轨和导电槽架紧固在一起,前、后火线电轨前、后端接口均对齐、紧靠,所述导电槽架将所有地下电轨前、后端接口连接为导电状态,由无数独立的火线电轨连接成长距离火线电轨;所述水泥槽的上端设置无数个水泥预制的左、右盖板94、95,所有左、右盖板的中线均制造左、右榫眼,所述水泥槽的上端制造无数个左、右榫头96、97,所有左、右盖板的榫眼均与所有水泥槽的榫头对口,所有左、右盖板的前、后端接口均对齐、均与地面一平,连接成长距离左、右盖板;所述左、右盖板内侧的截面为三角形支撑体,左、右支撑体内端均制造左、右台阶,所述左、右台阶上面设置左、右接地电轨98、99,所述接地电轨毎根8米,接地电轨为三角铁钢材,接地电轨前、后端设置前、后沉头螺丝钉孔,所述左、右台阶均设置安装孔,所述左、右台阶下面设置左、右导电板100、101,左、右导电板前、后端设置螺丝钉孔,由左、右沉头螺丝钉102、103通过左、右接地电轨孔、左、右台阶安装孔、左、右导电板孔及左、右螺丝帽,将无数个接地电轨和导电板与左、右台阶紧固连接,所述导电板将所有接地电轨前、后端的接口连接为导电状态,所有左、右接地电轨的前、后端接口均对齐、均与地面一平,连接成长距离左、右接地电轨,长距离左、右接地电轨之间设置轨道槽口104,所述轨道槽口的平行距离为3厘米,所述轨道槽口是所述导航受电刀的入口;在所述导航槽内部,所述火线电轨与左、右接地电轨之间平行距离的设定以及所述水泥槽空间大小的设定,应满足火线电轨与地之间在潮湿的条件下高电压的绝缘要求;所述导航槽设置在公交线路往返行驶的双向车道上,导航槽是封闭的环线,所述的公交线路上设置始发站和末发站,导航槽在始发站和末发站台的转弯轨迹是弧线,始发站和末发站之间设置若干不同地址的站台,始发站和末发站之间经过若干有红绿灯的十字路口,所述导航槽的轨迹在经过每一个公交站台时,导航槽靠近站台,导航槽靠近站台的转弯轨迹是弧线,所述导航路由器设置在水泥槽的左墙壁及左预制板下端,所述导航路由器内部设置宽带无线发射与接收电路、发射、接收天线、地址信号编码电路和红外发射电路,所述宽带无线发射与接收电路的输入端连接监控电脑网线,所述地址信号编码电路内部分别刻录不同的地址信息,所述导航路由器设置条形窗口,条形窗口内设置红外发射管一105,所述红外发射电路输出端连接红外发射管一,所述导航受电刀左端中部设置红外接收管一,所述无人驾驶公交车行驶中,当红外接收管一接近红外发射管一时,所述红外发射管一发射的红外光照射红外接收管一,红外接收管一的输出端连接智能控制模块相关输入端,导航路由器地址信号通过红外接收管一传输到车载计算机。
所述公交线路上的始发站附近设置供电监控站,所述供电监控站设置调度监控室和供电配电房,所述调度监控室里设置调度监控电脑,配电房设置配电柜,配电柜内交流电源的火线为供电火线,供电火线由地下电缆连接到所述火线电轨,配电柜内交流电源的地线为供电地线,供电地线由地下电缆连接到所述左、右接地电轨,配电柜交流电的电压值根据电动汽车技术标准设定,所述调度监控电脑设置电脑网线,电脑网线从地下连接所有导航路由器输入端,所述调度监控电脑的指挥人员,根据无人驾驶公交车的运行状况实时监控,可以对无人驾驶公交车进行人工操作。
所述导航受电刀落入轨道槽口时,导航受电刀的接地滑轮支撑在所述轨道槽口,导航受电刀下端的所述火线炭刷与火线电轨上端的光滑弧面滑动接触,导航受电刀垂直于火线电轨时,所述减速电机停机,导航受电刀位置锁定,此时所述减速电机的下连接板翘起,所述减速电机的重力加上所述复位弹簧的拉力作用在接地滑轮上,所述接地滑轮的左、右导电锥体与所述左、右接地电轨的左、右棱角滚动接触,接触压强大,导电良好、可靠,所述火线炭刷依靠弹簧压力与所述地下电轨滑动连接,所述智能充电模块的电源线分别连接接地滑轮和火线炭刷,智能充电模块的输出线连接蓄电池组,实现所述无人驾驶公交车与导航槽的电源连接;所述无人驾驶公交车在行驶中左、右偏离路面中线一定范围时,导航受电刀跟随所述减速电机被迫左、右滑动,所述刀型骨架与所述轨道槽口保持平行,在轨道槽口左、右边处于滑动摩擦状态。
无人驾驶公交车专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0