










专利摘要
一种军舰导弹电磁炮,滑翔导弹在细长型多线圈炮管内驱动,在较长的行程和时间内经过多个电磁线圈的接力加速,不需要很大的电功率就能将滑翔导弹的速度提高到极限,调整军舰行进方向和多线圈炮管的仰角,军舰导弹电磁炮即可对目标进行瞄准射击,滑翔导弹射出炮膛管的最高速度是超高音速,是滑翔导弹的初速度,滑翔导弹依靠惯性运动和方向可控的滑翔飞行击中目标,滑翔导弹的摄像机根据目标的图像信息,红外传感器根据目标的热源信息,左激光雷达、右激光雷达根据目标的反射信息,共同搜索并且锁定目标,导弹智能控制盒控制垂直翼改变导弹左右飞行方向,控制左水平翼和右水平翼改变导弹上下飞行方向,使滑翔导弹自动跟踪目标、打击目标。
权利要求
1.一种军舰导弹电磁炮,由军舰、多线圈炮管、滑翔导弹、导弹储存箱、智能控制器、导弹控制键盘和蓄电池组组成,其特征在于:所述军舰导弹电磁炮的军舰(1)右后方设有炮仓(2),炮仓底部设有三角支架(3),炮仓底部前方设有液压机架(4),液压机架前方设有电动液压泵(5),液压机架与电动液压泵之间设有液压管(6),液压管上设有电磁阀(7),三角支架和液压机架的上端设有多线圈炮管(8),多线圈炮管左边设有驾驶室(9),驾驶室内设有智能控制器(10)、数据信息显示器(11)、电磁炮控制键盘(12)和蓄电池组(13),军舰上设有探测目标的雷达探测器;所述多线圈炮管设有炮膛管(14),炮膛管是非导磁性的铜管,炮膛管的内圆和外圆横截面图形均是圆缺形,炮膛管外圆设有等分的多个线圈骨架(15),线圈骨架内平绕漆包线,制成电磁线圈(16),电磁线圈的内圆和外圆横截面图形均是圆缺形,多个电磁线圈之间等分的距离等于电磁线圈的长度,多个电磁线圈的外圆设有炮筒(17),炮筒是导磁性的钢管,炮筒的内圆和外圆横截面图形均是圆缺形,电磁线圈的前端与炮膛管的前端以及炮筒的前端一致,电磁线圈的后端与炮筒的后端一致,多个电磁线圈与炮膛管和炮筒之间的连接是紧配合安装连接,每个电磁线圈与炮筒之间均构成磁通回路,位于炮膛管的右端,炮膛管直径位置上的直线上设有多个传感器孔,炮膛管的后端第一个电磁线圈后端的传感器孔内安装霍尔传感器开(18),各电磁线圈之间中部位置的传感孔内均安装霍尔传感器开,各霍尔传感器开之间的距离是等分的,各电磁线圈内部位置的传感孔内均安装霍尔传感器关(19),各霍尔传感器关之间的距离是等分的,所述智能控制器内部设有电磁驱动控制模块、导弹速度传感换算模块和电机控制模块,所述电磁驱动控制模块设有多个相同的双稳开关电路,双稳开关电路由双稳态触发器(20)和开关三极管(21)组成,双稳开关电路与电磁线圈(16)以及霍尔传感器开(18)和霍尔传感器关(19)组成电磁驱动器,电磁驱动器的电路连接是:双稳态触发器的上输入端连接霍尔传感器开(18),双稳态触发器的下输入端连接霍尔传感器关(19),开关三极管输出端连接电磁线圈下端,双稳开关电路的接地端连接蓄电池组的负极,双稳开关电路的电源端和电磁线圈上端连接蓄电池组(13)的正极,蓄电池组是军舰搭载的电磁炮电源,蓄电池组依靠舰载发电机进行充电,多个相同的电磁驱动器并联于电源回路;炮膛管的后端连接导弹储存箱(22),导弹储存箱内储存多个滑翔导弹(23),单个滑翔导弹落到弹仓底部进行装弹、驱动、加速和发射,所述炮筒后下端焊接三角板支架(24),三角板支架下端焊接前连接耳(25)和后连接耳(26),前连接耳设有前关节轴(27),前关节轴连接液压机架上端,后连接耳设有后关节轴(28),后关节轴连接三角支架上端,炮仓底部设有连接耳(29),连接耳设有关节轴(30),关节轴连接液压机架下端,所述液压机架设有液压缸(31),液压缸内设有柱塞(32),可控的电动液压泵输出液压油经过电磁阀和液压管到液压缸底部,驱动柱塞上下滑动,使炮筒仰角上下调整;所述滑翔导弹用导磁的铁质材料制造,滑翔导弹设有圆柱体弹身(33),圆柱体弹身的横截面图形是圆缺形,圆柱体弹身的外圆与炮膛管的内圆是松配合滑动吻合,滑翔导弹依靠圆缺形实现圆柱体弹身圆周位置的定位,圆柱体弹身的前端和后端均为半球形,圆柱体弹身中心设有方孔,方孔内紧配合安装方管(34),圆柱体弹身右端设有圆凹槽,圆凹槽内安装永磁颗粒(35),所述方管的内方后端设有左水平翼电机(36),左水平翼电机中心设有左驱动轴(37),方管设有左轴孔,左驱动轴穿进左轴孔,左驱动轴安装左水平翼(38),方管的内方后端设有右水平翼电机(39),右水平翼电机中心设有右驱动轴(40),方管设有右轴孔,右驱动轴穿进右轴孔,右驱动轴安装右水平翼(41),左水平翼和右水平翼大小相同,左右对称,左、右水平翼电机型号相同,左右对称,左、右水平翼电机后端设有垂直翼电机(42),垂直翼电机上端设有垂直驱动轴(43),方管设有上轴孔,垂直驱动轴穿进上轴孔,垂直驱动轴上端安装垂直翼(44),垂直翼的长度大于左、右水平翼的长度,左、右水平翼电机和垂直翼电机均为谐波减速器电机,谐波减速器电机是一种谐波减速器与永磁无刷电机一体化的低转速电机,左、右水平翼电机正反转动时驱动左水平翼和右水平翼分别上下转向,垂直翼电机正反转动时驱动垂直翼左右转向,方管内设有智能控制盒(45),智能控制盒内部设有陀螺水平传感器、无刷电机控制模块和智能控制模块,智能控制盒后端设有干电池(46),方管前端设有球面盖板(47),球面盖板与圆柱体弹身前端的球面一致,球面盖板中心设有摄像孔,摄像孔内安装摄像机(48),摄像孔四周的球面盖板上设有4个传感器孔,摄像孔上端的传感器孔内安装红外传感器(49),摄像孔左端的传感器孔内安装左激光雷达传感器,摄像孔右端的传感器孔内安装右激光雷达传感器,摄像孔下端的传感器孔内安装启动指示灯(50),圆柱体弹身上端设有钢条孔(51),钢条孔穿过方管壁直通方管内,方管内靠近钢条孔设有霍尔传感器(52),滑翔导弹设有启动钢条(53),启动钢条下端是永磁体(54),永磁体接近霍尔传感器时触发霍尔传感器处于导通或者截止的开关状态,从而控制滑翔导弹的电源开关,钢条穿进滑翔导弹的锁孔触发霍尔传感器,打开滑翔导弹电源,滑翔导弹的启动指示灯亮,多个滑翔导弹启动后从弹仓门装进导弹储存箱,所述霍尔传感器、摄像机、红外传感器和左激光雷达、右激光雷达以及陀螺水平传感器的输出线分别与智能控制模块的相关输入端连接,无刷电机控制模块的多个输出端分别连接左水平翼电机、右水平翼电机和垂直翼电机,智能控制模块的多个输出端分别连接无刷电机控制模块输入端以及启动指示灯;滑翔导弹在炮膛内向前方运动,所述永磁颗粒与霍尔传感器开对齐时,霍尔传感器开触发双稳态触发器使开关三极管导通,给滑翔导弹的前端电磁线圈供电,电磁线圈产生电磁场吸引滑翔导弹前进,圆柱体弹身的长度等于电磁线圈的长度,当圆柱体弹身吸引到电磁线圈的中心,圆柱体弹身前后端与电磁线圈前后端一致时,永磁颗粒与霍尔传感器关对齐,霍尔传感器关触发双稳态触发器使开关三极管截止,给电磁线圈断电,滑翔导弹脱离磁力后依靠惯性继续前进,滑翔导弹经过每个电磁线圈都能够在同样的最佳位置上获得电磁力和失去电磁力,使滑翔导弹获得最大连续的电磁驱动力,滑翔导弹在前面多个电磁线圈的吸引下接力加速,速度很快提高,最后出膛向前方目标射击;所述导弹速度传感换算模块的输入端一连接炮膛管前端第一个霍尔传感器开的信号,输入端二连接炮膛管前端第三个霍尔传感器开的信号,导弹速度传感换算模块的输出端连接数据信息显示器,导弹速度传感换算模块根据滑翔导弹在炮膛管内末段行程的时间,换算出滑翔导弹的最高时速为出炮膛时的初速度,并且在数据信息显示器上显示;所述军舰导弹电磁炮设置导弹储存箱(22),导弹储存箱内上端设有推弹车,推弹车设有方框车架(55),方框车架下端设置弹仓(56),弹仓内存放多个滑翔导弹(23),导弹储存箱内的宽度等于滑翔导弹的长度,导弹储存箱内的厚度等于滑翔导弹的宽度,导弹储存箱内的高度等于多个滑翔导弹排列的高度与方框车架的高度之和,弹仓底部前端连接炮膛管,方框车架的前端设有上车轮轴(57)和下车轮轴(58),上、下车轮轴的左右端分别安装前上左、右车轮(59)和前下左、右车轮(60),方框车架的后端设有上车轮轴(61)和下车轮轴(62),上、下车轮轴的左右端分别安装后上左、右车轮(63)和后下左、右车轮(64),方框车架前端焊接连接板(65),导弹储存箱前端设有线条槽(66),连接板位于线条槽内,连接板前端设有减速电机(67),减速电机右端设有驱动齿轮(68),导弹储存箱的前端设有齿条(69),驱动齿轮与齿条啮合,减速电机正反转动时,驱动推弹车上下移动,四个车轮支撑在导弹储存箱内壁的前后端,稳定驱动齿轮与齿条之间的啮合间隙,弹仓左端和右端均设有条形槽(70),左、右条形槽内均设有钢板弹簧(71),左、右钢板弹簧大小相等、左右对称,左、右钢板弹簧下端设有弹力抓手,多个滑翔导弹的下端第一个滑翔导弹的左、右端被弹力抓手牢牢抓住,使多个滑翔导弹在推弹车静止状态下稳固在弹仓中部,弹仓右端设有上传感器孔和下传感器孔,上传感器孔内安装霍尔传感器停(72),下传感器孔内安装霍尔关传感器(73),连接板右端设有柱形永磁体(74),导弹储存箱右端设有传感器孔,传感器孔内安装霍尔停传感器(75),所述霍尔传感器停、霍尔关传感器、霍尔停传感器和导弹控制键盘的输出线分别连接电机控制模块的相关输入端,电机控制模块的输出端分别连接减速电机、电动液压泵和电磁阀的输出线,电机控制模块的电源端连接蓄电池组正极,所述电磁炮控制键盘设有仰角向上按钮、仰角向下按钮、倒车按钮、导弹单一发射按钮和导弹连续发射按钮,按倒车按钮时,触发电机控制模块控制减速电机逆时针转动,驱动推弹车向上运动到顶,柱形永磁体对准霍尔停传感器,霍尔停传感器触发电机控制模块关断减速电机电源,推弹车停止,推弹车下方空间是弹仓,导弹储存箱后端设有弹仓门(76),打开弹仓门,将多个打开电源的滑翔导弹装进弹仓,按导弹单一发射按钮时,触发电机控制模块减速电机顺时针转动,推弹车向下推动多个滑翔导弹,将下端第一个滑翔导弹推出弹力抓手,当多个滑翔导弹下端第二个滑翔导弹的永磁颗粒与霍尔关传感器对齐时,霍尔关传感器输出脉冲信号触发电机控制模块,减速电机自动停止,弹力抓手抓住第二个滑翔导弹的左、右端,第一个滑翔导弹脱离左、右钢板弹簧的抓力掉进弹仓底部,第一个滑翔导弹的永磁颗粒与霍尔传感器开对齐,霍尔传感器开触发智能控制器给后端第一个电磁线圈供电,电磁线圈产生电磁场吸引滑翔导弹向前运动,滑翔导 弹经过多个电磁线圈的接力加速后发射出膛,按一次导弹单一发射按钮是一个触发脉冲,发射一个滑翔导弹,按导弹连续发射按钮时是多个触发脉冲,多个滑翔导弹连续发射,当最后一个滑翔导弹掉进弹仓底部时,推弹车向下运动到柱形永磁体对准霍尔传感器停时,霍尔传感器停触发电机控制模块关断减速电机电源,推弹车停止,按仰角向上按钮,触发电机控制模块打开电动液压泵和电磁阀,多线圈炮管的仰角向上调整,按仰角向下按钮触发电机控制模块关闭电动液压泵,多线圈炮管的仰角向下调整,多线圈炮管的仰角确定后,松开向上或者向下按钮电磁阀关闭,多线圈炮管的仰角固定;所述多线圈炮管的长度小于军舰的长度,大于现有技术的电磁炮管长度,多线圈炮管属于细长型炮管,多线圈炮管下端的三角板支架用于加强细长型炮管的支撑强度,滑翔导弹在细长型炮管内运动,在长行程和长时间内经过多个电磁线圈的接力加速,不需要大的电功率就能将滑翔导弹的速度提高到高超音速,军舰的雷达发现的目标在数据信息显示器上显示,对目标进行瞄准射击,滑翔导弹射出炮膛管的初速度是超高音速,滑翔导弹质量大,依靠惯性运动和方向可控的滑翔飞行击中目标,滑翔导弹的智能控制盒接受陀螺水平传感器的指令驱动左水平翼和右水平翼,使左、右水平翼保持水平状态,滑翔导弹的摄像机根据目标的图像信息,红外传感器根据目标的热源信息,左激光雷达和右激光雷达根据目标的反射信息,共同搜索并且锁定目标,向智能控制盒发出飞行方向的控制信号,控制垂直翼改变导弹左右飞行方向,控制左水平翼和右水平翼改变导弹上下飞行方向,使滑翔导弹自动跟踪和打击空中、海上或者陆地上的目标。
说明书
技术领域
本发明涉及一种电磁线圈炮的技术领域,确切地说是一种军舰导弹电磁炮。
背景技术
电磁炮与传统的火药炮相比具有弹丸速度高、射程远的优点,电磁炮技术分为电磁轨道炮和电磁线圈炮两种,目前我国的电磁轨道炮技术处于世界领先水平,令人鼓舞的是我国已经将电磁轨道炮配备于军事战舰上进行测试获得成功,目前包括美国在内的一些军事强国未将电磁轨道炮配备于军事战舰上,仅处于研究实验阶段,电磁轨道炮的不足之处在于:电磁炮弹与通电导轨之间设有电刷,电磁炮弹出膛时,在通电导轨出口产生的电弧容易烧坏通电导轨,而电磁线圈炮没有电刷,不存在上述问题,但是电磁线圈炮的缺点在于电磁炮弹本身不产生磁场,在电磁线圈内产生的推动力不足,如果电磁炮弹在长度较短的炮膛内加快很高的速度非常困难。
发明内容
为了克服现有电磁轨道炮和电磁线圈炮的缺点,本发明公开一种军舰导弹电磁炮。所述军舰导弹电磁炮主要由军舰、多线圈炮管、滑翔导弹、导弹储存箱、智能控制器、导弹控制键盘和蓄电池组组成,其特征在于:所述军舰导弹电磁炮的军舰右后方设有炮仓,炮仓底部设有三角支架,炮仓底部前方设有液压机架,液压机架前方设有电动液压泵,液压机架与电动液压泵之间设有液压管,液压管上设有电磁阀,三角支架和液压机架的上端设有多线圈炮管,多线圈炮管左边设有驾驶室,驾驶室内设有智能控制器、数据信息显示器、电磁炮控制键盘和蓄电池组,军舰上设有探测目标的雷达探测器;所述多线圈炮管设有炮膛管,炮膛管是非导磁性的铜管,炮膛管的内圆和外圆横截面图形均是圆缺形,炮膛管外圆设有多个线圈骨架,线圈骨架内平绕漆包线,制成电磁线圈,电磁线圈的内圆和外圆横截面图形均是圆缺形,多个电磁线圈之间等分的距离等于电磁线圈的长度,多个电磁线圈的外圆设有炮筒,炮筒是导磁性的钢管,炮筒的内圆和外圆横截面图形均是圆缺形,电磁线圈的前端与炮膛管和炮筒的前端一致,电磁线圈的后端与炮桶的后端一致,多个电磁线圈与炮膛管和炮筒紧配合安装,每个电磁线圈与炮筒之间均构成磁通回路,位于炮膛管的右端,炮膛管直径位置上的直线上设有多个传感器孔,炮膛管后端第一个电磁线圈后端的传感器孔安装霍尔传感器开,电磁线圈之间中部位置的传感孔内均安装霍尔传感器开,霍尔传感器开之间的距离是等分的,电磁线圈内部位置的传感孔内均安装霍尔传感器关,霍尔传感器关之间的距离是等分的,所述智能控制器内部设有电磁驱动控制模块、导弹速度传感换算模块和电机控制模块,所述电磁驱动控制模块设有多个相同的双稳开关电路,双稳开关电路由双稳态触发器和开关三极管组成,双稳开关电路与电磁线圈以及霍尔传感器开和霍尔传感器关组成电磁驱动器,电磁驱动器的电路连接是:双稳态触发器的上输入端连接霍尔传感器开,双稳态触发器的下输入端连接霍尔传感器关,开关三极管输出端连接电磁线圈下端,双稳开关电路的接地端连接蓄电池组的负极,双稳开关电路的电源端和电磁线圈上端连接蓄电池组的正极,蓄电池组是军舰搭载的电磁炮电源,蓄电池组依靠舰载发电机进行充电,多个相同的电磁驱动器并联于电源回路;炮膛管的后端连接导弹储存箱,导弹储存箱内储存多个滑翔导弹,单个滑翔导弹落到弹仓底部进行装弹、驱动、加速和发射,所述炮筒后下端焊接三角板支架,三角板支架下端焊接前连接耳和后连接耳,前连接耳设有前关节轴,前关节轴连接液压机架上端,后连接耳设有后关节轴,后关节轴连接三角支架上端,炮仓底部设有连接耳,连接耳设有关节轴,关节轴连接液压机架下端,所述液压机架设有液压缸,液压缸内设有柱塞,电动液压泵输出液压油经过电磁阀和液压管到液压缸底部,驱动柱塞上下滑动,使炮筒仰角上下调整;所述滑翔导弹用导磁的铁质材料制造,滑翔导弹设有圆柱体弹身,弹身的横截面图形是圆缺形,圆柱体弹身与炮膛管的内圆松配合滑动吻合,滑翔导弹依靠圆缺形实现弹身圆周的定位,圆柱体弹身的前端和后端均为半球形,圆柱体弹身中心设有方孔,方孔内紧配合安装方管,圆柱体弹身右端设有圆凹槽,圆凹槽内安装永磁颗粒,所述方管的内方后端设有左水平翼电机,左水平翼电机中心设有左驱动轴,方管设有左轴孔,左驱动轴穿进左轴孔,左驱动轴安装左水平翼,方管的内方后端设有右水平翼电机,右水平翼电机中心设有右驱动轴,方管设有右轴孔,右驱动轴穿进右轴孔,右驱动轴安装右水平翼,左水平翼和右水平翼大小相同,左右对称,左、右水平翼电机型号相同,左右对称,左、右水平翼电机后端设有垂直翼电机,垂直翼电机上端设有垂直驱动轴,方管设有上轴孔,垂直驱动轴穿进上轴孔,垂直驱动轴上端安装垂直翼,垂直翼的长度大于左、右水平翼的长度,左、右水平翼电机和垂直翼电机均为谐波减速器电机,谐波减速器电机是一种谐波减速器与永磁无刷电机一体化的低转速电机,左、右水平翼电机正反转动时驱动左水平翼和右水平翼分别上下转向,垂直翼电机正反转动时驱动垂直翼左右转向,方管内设有智能控制盒,智能控制盒内部设有陀螺水平传感器、无刷电机控制模块和智能控制模块,智能控制盒后端设有干电池,方管前端设有球面盖板,球面盖板与圆柱体弹身前端的球面一致,球面盖板中心设有摄像孔,摄像孔内安装摄像机,摄像孔四周的球面盖板上设有4个传感器孔,摄像孔上端的传感器孔内安装红外传感器,摄像孔左端的传感器孔内安装左激光雷达传感器,摄像孔右端的传感器孔内安装右激光雷达传感器,摄像孔下端的传感器孔内安装启动指示灯,圆柱体弹身上端设有钢条孔,钢条孔穿过方管壁直通方管内,方管内靠近钢条孔设有霍尔传感器,滑翔导弹设有启动钢条,启动钢条下端是永磁体,永磁体接近霍尔传感器时触发霍尔传感器处于导通或者截止的开关状态,从而控制滑翔导弹的电源开关,钢条穿进滑翔导弹的锁孔触发霍尔传感器,打开滑轮导弹电源,滑翔导弹的启动指示灯亮,多个滑翔导弹启动后装进导弹储存箱,所述霍尔传感器、摄像机、红外传感器和左激光雷达、右激光雷达以及陀螺水平传感器的输出线分别与智能控制模块的相关输入端连接,无刷电机控制模块的多个输出端分别连接左水平翼电机、右水平翼电机和垂直翼电机,智能控制模块的多个输出端分别连接无刷电机控制模块输入端以及启动指示灯;滑翔导弹在炮膛内向前方运动,所述永磁颗粒与霍尔传感器开对齐时,霍尔传感器开触发双稳态触发器使开关三极管导通,给滑翔导弹的前端电磁线圈供电,电磁线圈产生电磁场吸引滑翔导弹前进,圆柱体弹身的长度等于电磁线圈的长度,当圆柱体弹身吸引到电磁线圈的中心,圆柱体弹身前后端与电磁线圈前后端一致时,永磁颗粒与霍尔传感器关对齐,霍尔传感器关触发双稳态触发器使开关三极管截止,给电磁线圈断电,滑翔导弹脱离磁力后依靠惯性继续前进,滑翔导弹经过每个电磁线圈都能够在同样的最佳位置上获得电磁力和失去电磁力,使滑翔导弹获得最大连续的电磁驱动力,滑翔导弹在前面多个电磁线圈的吸引下接力加速,速度很快提高,最后出膛向前方目标射击;所述导弹速度传感换算模块的输入端一连接炮膛管前端第一个霍尔传感器开的信号,输入端二连接炮膛管前端第三个霍尔传感器开的信号,导弹速度传感换算模块的输出端连接数据信息显示器,导弹速度传感换算模块根据滑翔导弹在炮膛管内末段行程的时间,换算出滑翔导弹的最高时速为出炮膛时的初速度,并且在数据信息显示器上显示。
所述军舰导弹电磁炮设置导弹储存箱,导弹储存箱内上端设有推弹车,推弹车设有方框车架,方框车架下端设置弹仓,弹仓内存放多个滑翔导弹,导弹储存箱内的宽度等于滑翔导弹的长度,导弹储存箱内的厚度等于滑翔导弹的宽度,导弹储存箱内的高度等于多个滑翔导弹排列的高度与方框车架的高度之和,弹仓底部前端连接炮膛管,方框车架的前端设有上车轮轴和下车轮轴,上、下车轮轴的左右端分别安装前上左、右车轮和前下左、右车轮,方框车架的后端设有上车轮轴和下车轮轴,上、下车轮轴的左右端分别安装后上左、右车轮和后下左、右车轮,方框车架前端焊接连接板,导弹储存箱前端设有线条槽,连接板位于线条槽内,连接板前端设有减速电机,减速电机右端设有驱动齿轮,导弹储存箱的前端设有齿条,驱动齿轮与齿条啮合,减速电机正反转动时,上下驱动推弹车,所述四个车轮支撑在导弹储存箱内的前后端,稳定驱动齿轮与齿条的啮合间隙,弹仓左端和右端均设有条形槽,左、右条形槽内均设有钢板弹簧,左、右钢板弹簧大小相等、左右对称,左、右钢板弹簧下端设有弹力抓手,多个滑翔导弹的下端第一个滑翔导弹的左、右端被弹力抓手牢牢抓住,使多个滑翔导弹在推弹车静止状态下稳固在弹仓中部,弹仓右端设有上传感器孔和下传感器孔,上传感器孔内安装霍尔传感器停,下传感器孔内安装霍尔关传感器,连接板右端设有柱形永磁体,导弹连发盒右端设有传感器孔,传感器孔内安装霍尔停传感器,所述霍尔传感器停、霍尔关传感器、霍尔停传感器和导弹控制键盘的输出线分别连接电机控制模块的相关输入端,电机控制模块的输出端分别连接减速电机、电动液压泵和电磁阀,电机控制模块的电源端连接蓄电池组,所述电磁炮控制键盘设有仰角向上按钮、仰角向下按钮、倒车按钮、导弹单一发射按钮和导弹连续发射按钮,按倒车按钮触发电机控制模块,控制减速电机逆时针转动,驱动推弹车向上运动到顶,柱形永磁体对准霍尔停传感器,霍尔停传感器触发电机控制模块,关断减速电机电源,推弹车停止,推弹车下方空间是弹仓,导弹连发盒后端设有弹仓门,打开弹仓门,将多个打开电源的滑翔导弹装进弹仓,按导弹单一发射按钮触发电机控制模块,减速电机顺时针转动,推弹车向下推动多个滑翔导弹,将第一个滑翔导弹推出弹力抓手,当多个滑翔导弹下端第二个滑翔导弹的永磁颗粒与霍尔关传感器对齐时,霍尔关传感器输出脉冲信号触发电机控制模块,减速电机自动停止,弹力抓手抓住第二个滑翔导弹的左、右端,第一个滑翔导弹脱离左、右钢板弹簧的抓力掉进弹仓底部,第一个滑翔导弹的永磁颗粒与霍尔传感器开对齐,霍尔传感器开触发智能控制器给后端第一个电磁线圈供电,电磁线圈产生电磁场吸引滑翔导弹向前运动,滑轮翔弹经过多个电磁线圈的接力加速后发射出膛,按一次导弹单一发射按钮是一个触发脉冲,发射一个滑翔导弹,按导弹连续发射按钮时是多个触发脉冲,多个滑翔导弹连续发射,当最后一个滑翔导弹掉进弹仓底部时,推弹车向下运动到柱形永磁体对准霍尔传感器停,霍尔传感器停触发电机控制模块关断减速电机电源,推弹车停止,按仰角向上按钮,触发电机控制模块打开电动液压泵和电磁阀,多线圈炮管的仰角向上调整,按仰角向下按钮触发电机控制模块关闭电动液压泵,多线圈炮管的仰角向下调整,多线圈炮管的仰角确定后松开按钮电磁阀关闭,多线圈炮管的仰角固定。
所述军舰导弹电磁炮的有益效果在于:多线圈炮管的长度略小于军舰的长度,大于现有电磁炮管的长度,多线圈炮管属于细长型炮管,多线圈炮管下端的三角板支架用于加强细长型炮管的强度,滑翔导弹在细长型炮管内运动,可以在较长的时间和行程内经过多个电磁线圈的接力加速,因此不需要很大的电功率就能将滑翔导弹的速度提高到极限,军舰导弹电磁炮的结构简单、重量轻、能耗小,适用于装备在军舰上,军舰的雷达发现的目标在数据信息显示器上显示,调整军舰行进方向和多线圈炮管的仰角,军舰导弹电磁炮即可对目标进行瞄准射击,滑翔导弹射出炮膛管的最高速度是超高音速,是滑翔导弹的初速度,滑翔导弹依靠惯性运动和方向可控的滑翔飞行击中目标,滑翔导弹的智能控制盒接受陀螺水平传感器的指令驱动左水平翼和右水平翼,使左、右水平翼滑保持水平状态,滑翔导弹的摄像机根据目标的图像信息,红外传感器根据目标的热源信息,左激光雷达、右激光雷达根据目标的反射信息,共同搜索并且锁定目标,向智能控制盒发出飞行方向的控制信号,控制垂直翼改变导弹左右飞行方向,控制左水平翼和右水平翼改变导弹上下飞行方向,使滑翔导弹自动跟踪目标,滑翔导弹质量大,动能杀伤力大、穿透力强,适用于打击空中、海上或者陆地上的目标。
附图说明
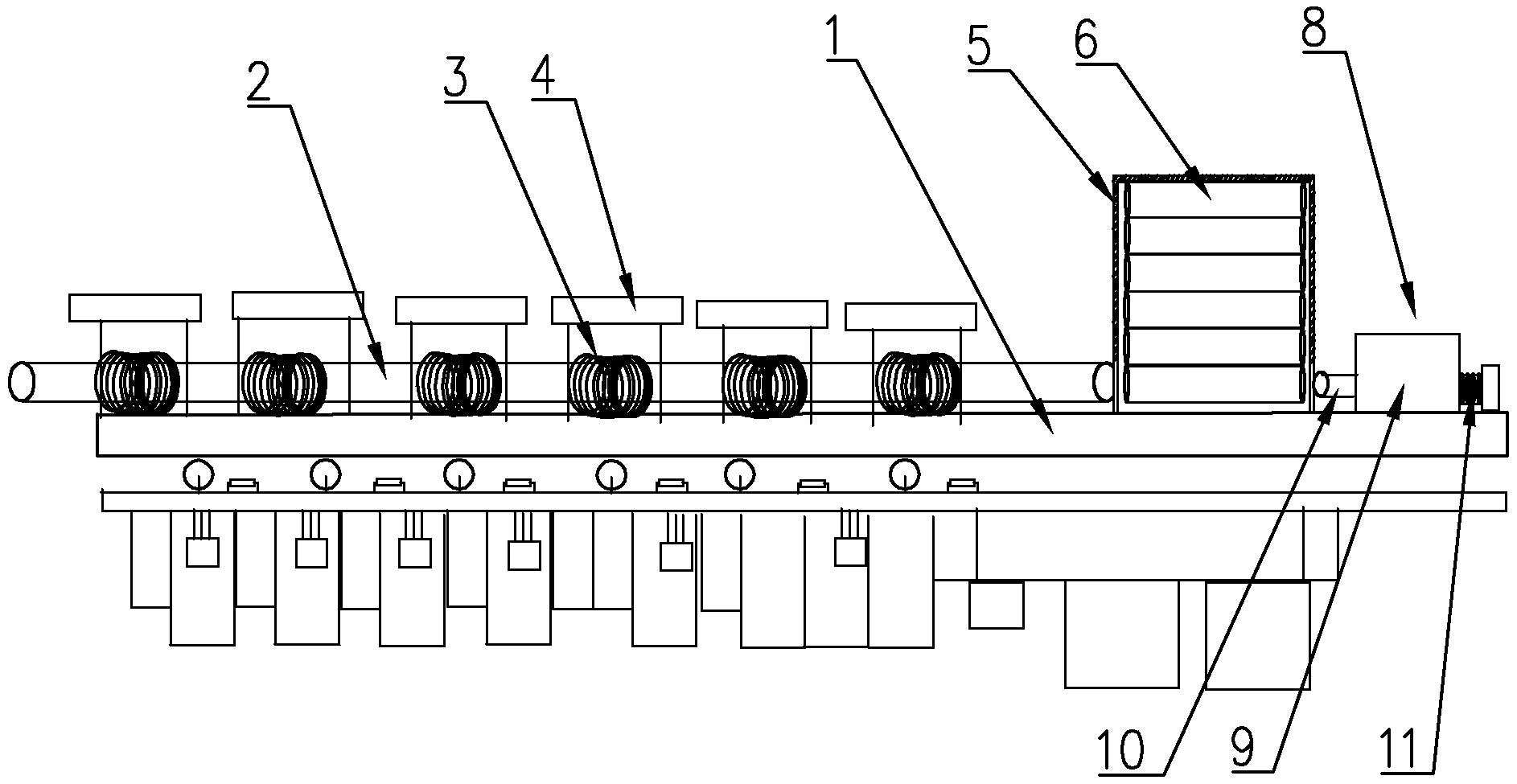
图1是军舰导弹电磁炮水平收藏状态右视整体结构示意图。
图2是军舰导弹电磁炮仰高发射状态右视整体结构示意图。
图3是电磁驱动器的电原理图。
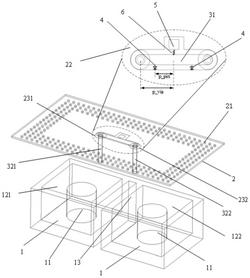
图4是滑翔导弹右视结构示意图。
图5是多线圈炮管的后视剖面结构示意图。
图6是导弹储存箱右视结构示意图。
具体实施方式
在图1-6中,所述军舰导弹电磁炮的军舰1右后方设有炮仓2,炮仓底部设有三角支架3,炮仓底部前方设有液压机架4,液压机架前方设有电动液压泵5,液压机架与电动液压泵之间设有液压管6,液压管上设有电磁阀7,三角支架和液压机架的上端设有多线圈炮管8,多线圈炮管左边设有驾驶室9,驾驶室内设有智能控制器10、数据信息显示器11、电磁炮控制键盘12和蓄电池组13,军舰上设有探测目标的雷达探测器;所述多线圈炮管设有炮膛管14,炮膛管是非导磁性的铜管,炮膛管的内圆和外圆横截面图形均是圆缺形,炮膛管外圆设有多个线圈骨架15,线圈骨架内平绕漆包线,制成电磁线圈16,电磁线圈的内圆和外圆横截面图形均是圆缺形,多个电磁线圈之间等分的距离等于电磁线圈的长度,多个电磁线圈的外圆设有炮筒17,炮筒是导磁性的钢管,炮筒的内圆和外圆横截面图形均是圆缺形,电磁线圈的前端与炮膛管和炮筒的前端一致,电磁线圈的后端与炮桶的后端一致,多个电磁线圈与炮膛管和炮筒之间是紧配合安装,每个电磁线圈与炮筒之间均构成磁通回路,位于炮膛管的右端,炮膛管直径位置上的直线上设有多个传感器孔,炮膛管后端第一个电磁线圈后端的传感器孔内安装霍尔传感器开18,各电磁线圈之间中部位置的传感孔内均安装霍尔传感器开,各霍尔传感器开之间的距离是等分的,各电磁线圈内部位置的传感孔内均安装霍尔传感器关19,各霍尔传感器关之间的距离是等分的,所述智能控制器内部设有电磁驱动控制模块、导弹速度传感换算模块和电机控制模块,所述电磁驱动控制模块设有多个相同的双稳开关电路,双稳开关电路由双稳态触发器20和开关三极管21组成,双稳开关电路与电磁线圈16以及霍尔传感器开18和霍尔传感器关19组成电磁驱动器,电磁驱动器的电路连接是:双稳态触发器的上输入端连接霍尔传感器开18,双稳态触发器的下输入端连接霍尔传感器关19,开关三极管输出端连接电磁线圈下端,双稳开关电路的接地端连接蓄电池组的负极,双稳开关电路的电源端和电磁线圈上端连接蓄电池组13的正极,蓄电池组是军舰搭载的电磁炮电源,蓄电池组依靠舰载发电机进行充电,多个相同的电磁驱动器并联于电源回路;炮膛管的后端连接导弹储存箱22,导弹储存箱内储存多个滑翔导弹23,单个滑翔导弹落到弹仓底部进行装弹、驱动、加速和发射,所述炮筒后下端焊接三角板支架24,三角板支架下端焊接前连接耳25和后连接耳26,前连接耳设有前关节轴27,前关节轴连接液压机架上端,后连接耳设有后关节轴28,后关节轴连接三角支架上端,炮仓底部设有连接耳29,连接耳设有关节轴30,关节轴连接液压机架下端,所述液压机架设有液压缸31,液压缸内设有柱塞32,可控的电动液压泵输出液压油经过电磁阀和液压管到液压缸底部,驱动柱塞上下滑动,使炮筒仰角上下调整;所述滑翔导弹用导磁的铁质材料制造,滑翔导弹设有圆柱体弹身33,弹身的横截面图形是圆缺形,圆柱体弹身与炮膛管的内圆松配合滑动吻合,滑翔导弹依靠圆缺形实现弹身圆周位置的定位,圆柱体弹身的前端和后端均为半球形,圆柱体弹身中心设有方孔,方孔内紧配合安装方管34,圆柱体弹身右端设有圆凹槽,圆凹槽内安装永磁颗粒35,所述方管的内方后端设有左水平翼电机36,左水平翼电机中心设有左驱动轴37,方管设有左轴孔,左驱动轴穿进左轴孔,左驱动轴安装左水平翼38,方管的内方后端设有右水平翼电机39,右水平翼电机中心设有右驱动轴40,方管设有右轴孔,右驱动轴穿进右轴孔,右驱动轴安装右水平翼41,左水平翼和右水平翼大小相同,左右对称,左、右水平翼电机型号相同,左右对称,左、右水平翼电机后端设有垂直翼电机42,垂直翼电机上端设有垂直驱动轴43,方管设有上轴孔,垂直驱动轴穿进上轴孔,垂直驱动轴上端安装垂直翼44,垂直翼的长度大于左、右水平翼的长度,左、右水平翼电机和垂直翼电机均为谐波减速器电机,谐波减速器电机是一种谐波减速器与永磁无刷电机一体化的低转速电机,左、右水平翼电机正反转动时驱动左水平翼和右水平翼分别上下转向,垂直翼电机正反转动时驱动垂直翼左右转向,方管内设有智能控制盒45,智能控制盒内部设有陀螺水平传感器、无刷电机控制模块和智能控制模块,智能控制盒后端设有干电池46,方管前端设有球面盖板47,球面盖板与圆柱体弹身前端的球面一致,球面盖板中心设有摄像孔,摄像孔内安装摄像机48,摄像孔四周的球面盖板上设有4个传感器孔,摄像孔上端的传感器孔内安装红外传感器49,摄像孔左端的传感器孔内安装左激光雷达传感器,摄像孔右端的传感器孔内安装右激光雷达传感器,摄像孔下端的传感器孔内安装启动指示灯50,圆柱体弹身上端设有钢条孔51,钢条孔穿过方管壁直通方管内,方管内靠近钢条孔设有霍尔传感器52,滑翔导弹设有启动钢条53,启动钢条下端是永磁体54,永磁体接近霍尔传感器时触发霍尔传感器处于导通或者截止的开关状态,从而控制滑翔导弹的电源开关,钢条穿进滑翔导弹的锁孔触发霍尔传感器,打开滑轮导弹电源,滑翔导弹的启动指示灯亮,多个滑翔导弹启动后装进导弹连发盒,所述霍尔传感器、摄像机、红外传感器和左激光雷达、右激光雷达以及陀螺水平传感器的输出线分别与智能控制模块的相关输入端连接,无刷电机控制模块的多个输出端分别连接左水平翼电机、右水平翼电机和垂直翼电机,智能控制模块的多个输出端分别连接无刷电机控制模块输入端以及启动指示灯;滑翔导弹在炮膛内向前方运动,所述永磁颗粒与霍尔传感器开对齐时,霍尔传感器开触发双稳态触发器使开关三极管导通,给滑翔导弹的前端电磁线圈供电,电磁线圈产生电磁场吸引滑翔导弹前进,圆柱体弹身的长度等于电磁线圈的长度,当圆柱体弹身吸引到电磁线圈的中心,圆柱体弹身前后端与电磁线圈前后端一致时,永磁颗粒与霍尔传感器关对齐,霍尔传感器关触发双稳态触发器使开关三极管截止,给电磁线圈断电,滑翔导弹脱离磁力后依靠惯性继续前进,滑翔导弹经过每个电磁线圈都能够在同样的最佳位置上获得电磁力和失去电磁力,使滑翔导弹获得最大连续的电磁驱动力,滑翔导弹在前面多个电磁线圈的吸引下接力加速,速度很快提高,最后出膛向前方目标射击;所述导弹速度传感换算模块的输入端一连接炮膛管前端第一个霍尔传感器开的信号,输入端二连接炮膛管前端第三个霍尔传感器开的信号,导弹速度传感换算模块的输出端连接数据信息显示器,导弹速度传感换算模块根据滑翔导弹在炮膛管内末段行程的时间,换算出滑翔导弹的最高时速为出炮膛时的初速度,并且在数据信息显示器上显示。
所述军舰导弹电磁炮设置导弹储存箱22,导弹储存箱内上端设有推弹车,推弹车设有方框车架55,方框车架下端设置弹仓56,弹仓内存放多个滑翔导弹,导弹储存箱内的宽度等于滑翔导弹的长度,导弹储存箱内的厚度等于滑翔导弹的宽度,导弹储存箱内的高度等于多个滑翔导弹排列的高度与方框车架的高度之和,弹仓底部前端连接炮膛管,方框车架的前端设有上车轮轴57和下车轮轴58,上、下车轮轴的左右端分别安装前上左、右车轮59和前下左、右车轮60,方框车架的后端设有上车轮轴61和下车轮轴62,上、下车轮轴的左右端分别安装后上左、右车轮63和后下左、右车轮64,方框车架前端焊接连接板65,导弹储存箱前端设有线条槽66,连接板位于线条槽内,连接板前端设有减速电机67,减速电机右端设有驱动齿轮68,导弹储存箱的前端设有齿条69,驱动齿轮与齿条啮合,减速电机正反转动时,驱动推弹车上下移动,所述四个车轮支撑在导弹连发箱内壁的前后端,稳定驱动齿轮与齿条的啮合间隙,弹仓左端和右端均设有条形槽70,左、右条形槽内均设有钢板弹簧71,左、右钢板弹簧大小相等、左右对称,左、右钢板弹簧下端设有弹力抓手,多个滑翔导弹的下端第一个滑翔导弹的左、右端被弹力抓手牢牢抓住,使多个滑翔导弹在推弹车静止状态下稳固在弹仓中部,弹仓右端设有上传感器孔和下传感器孔,上传感器孔内安装霍尔传感器停72,下传感器孔内安装霍尔关传感器73,连接板右端设有柱形永磁体74,导弹储存箱右端设有传感器孔,传感器孔内安装霍尔停传感器75,所述霍尔传感器停、霍尔关传感器、霍尔停传感器和导弹控制键盘的输出线分别连接电机控制模块的相关输入端,电机控制模块的输出端分别连接减速电机、电动液压泵和电磁阀,电机控制模块的电源端连接蓄电池组正极,所述电磁炮控制键盘设有仰角向上按钮、仰角向下按钮、倒车按钮、导弹单一发射按钮和导弹连续发射按钮,按倒车按钮触发电机控制模块,控制减速电机逆时针转动,驱动推弹车向上运动到顶,柱形永磁体对准霍尔停传感器,霍尔停传感器触发电机控制模块关断减速电机电源,推弹车停止,推弹车下方空间是弹仓,导弹连发盒后端设有弹仓门76,打开弹仓门,将多个打开电源的滑翔导弹装进弹仓,按导弹单一发射按钮触发电机控制模块,减速电机顺时针转动,推弹车向下推动多个滑翔导弹,将下端第一个滑翔导弹推出弹力抓手,当多个滑翔导弹下端第二个滑翔导弹的永磁颗粒与霍尔关传感器对齐时,霍尔关传感器输出脉冲信号触发电机控制模块,减速电机自动停止,弹力抓手抓住第二个滑翔导弹的左、右端,第一个滑翔导弹脱离左、右钢板弹簧的抓力掉进弹仓底部,第一个滑翔导弹的永磁颗粒与霍尔传感器开对齐,霍尔传感器开触发智能控制器给后端第一个电磁线圈供电,电磁线圈产生电磁场吸引滑翔导弹向前运动,滑轮翔弹经过多个电磁线圈的接力加速后发射出膛,按一次导弹单一发射按钮是一个触发脉冲,发射一个滑翔导弹,按导弹连续发射按钮时是多个触发脉冲,多个滑翔导弹连续发射,当最后一个滑翔导弹掉进弹仓底部时,推弹车向下运动到柱形永磁体对准霍尔传感器停时,霍尔传感器停触发电机控制模块关断减速电机电源,推弹车停止,按仰角向上按钮,触发电机控制模块打开电动液压泵和电磁阀,多线圈炮管的仰角向上调整,按仰角向下按钮触发电机控制模块关闭电动液压泵,多线圈炮管的仰角向下调整,多线圈炮管的仰角确定后,松开向上或者向下按钮电磁阀关闭,多线圈炮管的仰角固定。
多线圈炮管的长度略小于军舰的长度,大于现有电磁炮管的长度,多线圈炮管属于细长型炮管,多线圈炮管下端的三角板支架用于加强细长型炮管的支撑强度,滑翔导弹在细长型炮管内运动,可以在较长的行程和时间内经过多个电磁线圈的接力加速,因此不需要很大的电功率就能将滑翔导弹的速度提高到极限,军舰导弹电磁炮的结构简单、重量轻、能耗小,适用于装备在军舰上,军舰的雷达发现的目标在数据信息显示器上显示,调整军舰行进方向和多线圈炮管的仰角,军舰导弹电磁炮即可对目标进行瞄准射击,滑翔导弹射出炮膛管的最高速度是超高音速,是滑翔导弹的初速度,滑翔导弹依靠惯性运动和方向可控的滑翔飞行击中目标,滑翔导弹的智能控制盒接受陀螺水平传感器的指令驱动左水平翼和右水平翼,使左、右水平翼滑保持水平状态,滑翔导弹的摄像机根据目标的图像信息,红外传感器根据目标的热源信息,左激光雷达、右激光雷达根据目标的反射信息,共同搜索并且锁定目标,向智能控制盒发出飞行方向的控制信号,控制垂直翼改变导弹左右飞行方向,控制左水平翼和右水平翼改变导弹上下飞行方向,使滑翔导弹自动跟踪目标、打击目标,滑翔导弹质量大,动能杀伤力大、穿透力强,适用于打击空中、海上或者陆地上的目标。
军舰导弹电磁炮专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0