









专利摘要
本发明提供一种自动扫地机器人,包括机器人本体,其底部设有吸尘口、行走轮、转向轮、起尘刷;行走轮后方还设有从动棍;从动辊与行走轮、转向轮一同着地;从动辊后方设有可上下活动的活动板,活动板下侧水平固定抹布;活动板的上侧连接有与从动辊相耦合的传动机构,该传动机构使从动辊向前行进时,将活动板向上升起;从动辊的表面粗糙度具有如下要求:在该扫地机器人在地板及地砖地面上行进时,从动辊与地面之间保持滑动摩擦;而该扫地机器人在地毯上行进时,从动辊与地面之间保持滚动摩擦。该机器人可以在铺设有地毯的室内自动调节其拖地功能,以避免对地毯造成损坏。
权利要求
1.一种自动扫地机器人,包括机器人本体(1),所述机器人本体(1)的底部设有吸尘口、行走轮(21)、转向轮(22),以及起尘刷(3);其特征在于:所述行走轮(21)的后方还设有平行于行走轮(21)的转轴的从动棍(4);所述从动辊(4)与所述行走轮(21)、转向轮(22)一同着地;所述从动辊(4)的后方设有一块可上下活动的活动板(5),所述活动板(5)下侧可水平固定抹布(51);所述活动板(5)的上侧连接有与所述从动辊(4)相耦合的传动机构,该传动机构使从动辊(4)向前行进时,将所述活动板(5)向上升起,以使活动板(5)下侧的(51)布脱离地面;所述从动辊(4)的表面粗糙度具有如下要求:在该扫地机器人在地板及地砖地面上行进时,从动辊(4)与地面之间保持滑动摩擦;而该扫地机器人在地毯上行进时,从动辊(4)与地面之间保持滚动摩擦。
2.根据权利要求1所述的自动扫地机器人,其特征在于:所述传动机构包括所述活动板(5)上侧的、可在机器人本体(1)内的、半开放式的竖直滑道(60)内滑动的齿条(61);以及与该齿条(61)耦合的驱动齿轮(62),所述驱动齿轮(62)与所述从动辊(4)通过带传动机构相耦合。
3.一种自动扫地机器人,包括机器人本体(1),所述机器人本体(1)的底部设有吸尘口、行走轮(21)、转向轮(22),以及起尘刷(3);所述行走轮(21)的后方还设有平行于行走轮(21)的转轴的从动棍(4);所述从动辊(4)与所述行走轮(21)、转向轮(22)一同着地;所述从动辊(4)的后方设有一块可上下活动的活动板(5),所述活动板(5)下侧可水平固定抹布(51);所述活动板(5)内设有铁质部件;所述机器人本体(1)内、所述活动板(5)上方设有电磁铁结构(8);所述从动辊(4)耦合于一个微型发电机(7),所述微型发电机(7)的发电极通过放大模块后输出至所述电磁铁结构(8);所述从动辊(4)的表面粗糙度具有如下要求:在该扫地机器人在地板及地砖地面上行进时,从动辊(4)与地面之间保持滑动摩擦;而该扫地机器人在地毯上行进时,从动辊(4)与地面之间保持滚动摩擦。
说明书
技术领域
本发明涉及自动化设备领域,特别地,涉及一种扫地机器人。
背景技术
目前,扫地机器人在现代家庭中已经开始逐渐普及;其主要包括呈圆盒状的机器人本体;机器人本体的底部中央设有吸尘口,由本体内部的吸尘扇形成吸力,使本体下方地面的尘屑可被吸入该吸尘口,并进入本体内部的集尘盒;机器人本体的下部还设有行走轮和转向轮;在吸尘口的前方则设有由电机驱动的连续旋转的起尘刷,起尘刷上的刷毛在旋转过程中,对吸尘口前方地面进行连续清扫,使附着于地面的尘屑扬起,从而易于被吸尘口吸取。
较多的扫地机器人的底部后方还设有抹布机构,一般的,在机器人工作前,先将抹布打湿,并黏贴于机器人本体的底部;在机器人行走过程中,抹布对清扫过的地面连续擦洗,以实现扫、拖一体化功能。然而,在房间内铺设有地毯的情况下,扫地机器人将直接从地板或地砖上爬行到地毯上进行清扫,在此情况下,湿润的抹布将对地毯造成较大的损害;因此,难以在铺设有地毯的房间内,放心使用机器人的拖地功能。
发明内容
针对上述问题,本发明的目的在于提供一种自动扫地机器人,该机器人可以在铺设有地毯的室内自动调节其拖地功能,以避免对地毯造成损坏。
本发明解决其技术问题所采用的第一种技术方案是:该自动扫地机器人包括机器人本体,所述机器人本体的底部设有吸尘口、行走轮、转向轮,以及起尘刷;所述行走轮的后方还设有平行于行走轮的转轴的从动棍;所述从动辊与所述行走轮、转向轮一同着地;所述从动辊的后方设有一块可上下活动的活动板,所述活动板下侧可水平固定抹布;所述活动板的上侧连接有与所述从动辊相耦合的传动机构,该传动机构使从动辊向前行进时,将所述活动板向上升起,以使活动板下侧的抹布脱离地面;所述从动辊的表面粗糙度具有如下要求:在该扫地机器人在地板及地砖地面上行进时,从动辊与地面之间保持滑动摩擦;而该扫地机器人在地毯上行进时,从动辊与地面之间保持滚动摩擦。
作为优选,所述传动机构包括所述活动板上侧的、可在机器人本体内的、半开放式的竖直滑道内滑动的齿条;以及与该齿条耦合的驱动齿轮,所述驱动齿轮与所述从动辊通过带传动或齿轮传动机构相耦合。
上述第一种方案的有益效果在于:该自动扫地机器人在工作时,如在光滑的地板或地砖面上行进,则由于所述从动辊表面的粗糙度较低,静摩擦力难以克服所述传动机构的阻力,使得从动辊与地面保持滑动摩擦,即从动辊与地面之间保持连续打滑状态,所述活动板和抹布在自重作用下覆盖在地面上,对地面进行连续拖擦;而当该机器人行进在地毯上时,由于地毯表面极其粗糙,与从动辊之间的最大静摩擦力大幅提高,从而使从动辊可连续旋转,直至带动所述活动板上升至上极限位置,然后从动辊、活动板保持静止状态;由此,使得机器人在对地毯进行清扫时,其抹布不接触地毯,可避免损坏地毯。
本发明解决其技术问题所采用的第二种技术方案是:该自动扫地机器人包括机器人本体,所述机器人本体的底部设有吸尘口、行走轮、转向轮,以及起尘刷;所述行走轮的后方还设有平行于行走轮的转轴的从动棍;所述从动辊与所述行走轮、转向轮一同着地;所述从动辊的后方设有一块可上下活动的活动板,所述活动板下侧可水平固定抹布;所述活动板内设有铁质部件;所述机器人本体内、所述活动板上方设有电磁铁结构;所述从动辊耦合于一个微型发电机,所述微型发电机的发电极通过放大模块后输出至所述电磁铁结构;所述从动辊的表面粗糙度具有如下要求:在该扫地机器人在地板及地砖地面上行进时,从动辊与地面之间保持滑动摩擦;而该扫地机器人在地毯上行进时,从动辊与地面之间保持滚动摩擦。
上述第二种方案的有益效果在于:该自动扫地机器人在工作时,如在光滑的地板或地砖面上行进,则由于所述从动辊表面的粗糙度较低,使得从动辊与地面保持滑动摩擦,即从动辊与地面之间连续打滑,所述微型发电机无法正常运转,从而使所述电磁铁结构难以获得励磁电流,所述活动板和抹布在自重作用下覆盖在地面上,对地面进行连续拖擦;而当该机器人行进在地毯上时,由于地毯表面极其粗糙,与从动辊之间的最大静摩擦力大幅提高,从而使从动辊可连续旋转,从而驱动微型发电机连续发电,以使所述电磁铁结构形成持续的励磁电流,使所述活动板在磁吸力作用下上升至上极限位置;由此,使得机器人在对地毯进行清扫时,其抹布不接触地毯,可避免损坏地毯;相较于第一种技术方案,第二种技术方案在活动板上升到上极限位置后,从动辊还能继续保持滚动,使从动辊与地毯之间的摩擦阻力始终保持在较低水平,故比第一种技术方案更为节能,且结构也更为简单。
附图说明
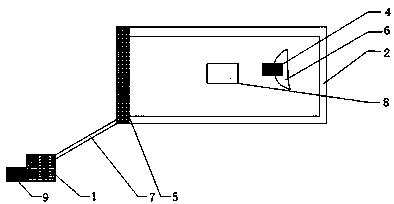
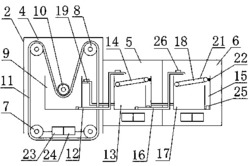
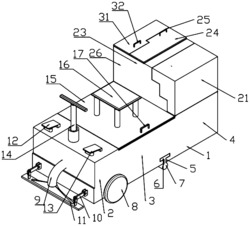
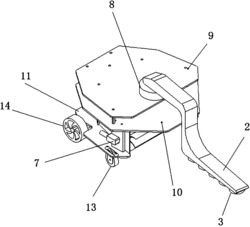
图1是本自动扫地机器人的实施例一的示意图。
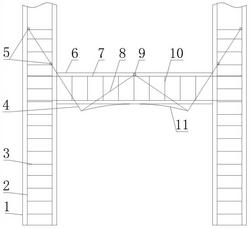
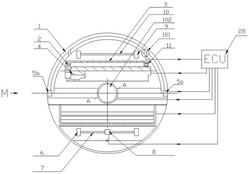
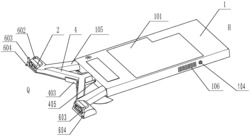
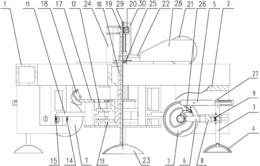
图2是本自动扫地机器人的实施例二的示意图。
具体实施方式
下面结合附图和实施例对本发明进一步说明:
实施例一:
在图1所示的实施例一中,该自动扫地机器人包括机器人本体1,所述机器人本体1的底部设有吸尘口(未图示)、行走轮21、转向轮22,以及起尘刷3;所述行走轮21的后方还设有平行于行走轮21的转轴的从动棍4;所述从动辊4与所述行走轮21、转向轮22一同着地;所述从动辊4的后方设有一块可上下活动的活动板5,所述活动板5下侧可水平固定抹布51;所述活动板5的上侧连接有与所述从动辊4相耦合的传动机构,该传动机构使从动辊4向前行进时,即从动辊4向前滚动时,将所述活动板5向上升起,以使活动板5下侧的抹51布脱离地面;所述从动辊4的表面粗糙度具有如下要求:在该扫地机器人在地板及地砖地面上行进时,从动辊4与地面之间保持滑动摩擦;实际上,由于地板和地砖通常十分光滑,因此从动辊4表面只要粗糙度不是很高,就极容易打滑;而该扫地机器人在地毯上行进时,从动辊4与地面之间保持滚动摩擦。
本实施例一中,所述传动机构包括所述活动板5上侧的、可在机器人本体1内的、半开放式的竖直滑道60内滑动的齿条61;以及与该齿条61耦合的驱动齿轮62,所述驱动齿轮62与所述从动辊4通过带传动机构相耦合。
实施例一中的自动扫地机器人在工作时,如在光滑的地板或地砖面上行进,则由于所述从动辊4表面的粗糙度较低,静摩擦力难以克服所述传动机构的阻力(所述活动板5的自重通过传动机构传递到从动辊4上,对从动辊4构成旋转阻力),使得从动辊4与地面保持滑动摩擦,即从动辊4与地面之间保持连续打滑状态,所述活动板5和抹布51在自重作用下覆盖在地面上,对地面进行连续拖擦;而当该机器人行进在地毯上时,由于地毯表面极其粗糙,与从动辊4之间的最大静摩擦力大幅提高,从而使从动辊4可连续旋转,直至带动所述活动板5上升至上极限位置,然后从动辊4、活动板5保持静止状态;由此,使得机器人在对地毯进行清扫时,其抹布不接触地毯,可避免损坏地毯。
实施例二:
在图2所示的实施例二中,该自动扫地机器人包括机器人本体1,所述机器人本体1的底部设有吸尘口(未图示)、行走轮21、转向轮22,以及起尘刷3;所述行走轮21的后方还设有平行于行走轮21的转轴的从动棍4;所述从动辊4与所述行走轮21、转向轮22一同着地;所述从动辊4的后方设有一块可上下活动的活动板5,所述活动板5下侧可水平固定抹布51;所述活动板5内设有铁质部件(未图示,可以为铁板);所述机器人本体1内、所述活动板5上方设有电磁铁结构8;所述从动辊4耦合于一个微型发电机7,所述微型发电机7的发电极通过放大模块(未图示,可集成于微型发电机壳体上,或集成于电磁铁结构8的包装上)后输出至所述电磁铁结构8;所述从动辊4的表面粗糙度具有如下要求:在该扫地机器人在地板及地砖地面上行进时,从动辊4与地面之间保持滑动摩擦;而该扫地机器人在地毯上行进时,从动辊4与地面之间保持滚动摩擦。
实施例二中的自动扫地机器人在工作时,如在光滑的地板或地砖面上行进,则由于所述从动辊4表面的粗糙度较低,使得从动辊4与地面保持滑动摩擦,即从动辊4与地面之间连续打滑,所述微型发电机7无法正常运转,从而使所述电磁铁结构8难以获得励磁电流,所述活动板5和抹布51在自重作用下覆盖在地面上,对地面进行连续拖擦;而当该机器人行进在地毯上时,由于地毯表面极其粗糙,与从动辊4之间的最大静摩擦力大幅提高,从而使从动辊4可连续旋转,从而驱动微型发电机7连续发电,以使所述电磁铁结构8形成持续的励磁电流,使所述活动板5在磁吸力作用下上升至上极限位置;由此,使得机器人在对地毯进行清扫时,其抹布51不接触地毯,可避免损坏地毯;相较于实施例一,本实施例二在活动板5上升到上极限位置后,从动辊4还能继续保持滚动,使从动辊4与地毯之间的摩擦阻力始终保持在较低水平(实施例一中,活动板5上升至上极限位置后,从动辊4将在地毯表面拖行,对整个机器人形成较大阻力),因此,实施例二比实施例一更为节能,且结构也更为简单。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换,均应包含在本发明的保护范围之内。
自动扫地机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0