








专利摘要
本发明涉及一种人枪系统相互作用力测量装置,包括后坐力测试平台、测力传感器和传感系统信号处理器,所述后坐力测试平台包括夹持夹具,夹持夹具与枪械之间设有弹簧阻尼机构,测力传感器设置后坐力测试平台与枪托之间,测力传感器采集枪械运动受力并发送给传感系统信号处理器,传感器包括X方向差动电容单元组合和Y方向差动电容单元组合,X方向差动电容单元组合和Y方向差动电容单元组合均包括两个以上相互形成差动的电容单元模块。受力测量装置采集到枪械后坐力,用以分析后坐能量、制退器效率等参数的测试。
权利要求
1.一种人枪系统相互作用力测量装置,其特征在于,包括后坐力测试平台、测力传感器和传感系统信号处理器,所述后坐力测试平台包括夹持夹具,夹持夹具与枪械之间设有弹簧阻尼机构,测力传感器设置后坐力测试平台与枪托之间,测力传感器采集枪械运动受力并发送给传感系统信号处理器,所述测力传感器包括X方向差动电容单元组合和Y方向差动电容单元组合,所述X方向差动电容单元组合和Y方向差动电容单元组合均包括两个以上相互形成差动的电容单元模块,所述电容单元模块采用由两个以上的条状电容单元组成的梳齿结构,每个条状电容单元包括上极板的驱动电极和下极板的感应电极,所述X方向差动电容单元组合和Y方向差动电容单元组合的电容值求和计算电容传感器的法向力且消除切向力影响。
2.根据权利要求1所述的人枪系统相互作用力测量装置,其特征在于,所述后坐力测试平台包括前夹持夹具和后夹持夹具,前夹持夹具包括仿形夹具、带滑动轨道的支架和施加预紧力机构,仿形夹具设在支架顶部,为带弹簧阻尼的圆环铁机构,施加预紧力机构控制弹簧阻尼的压缩量,后夹持夹具包括后坐夹紧机构和抵肩板,抵肩板设置枪托后方,所述测力传感器设置抵肩板与后坐力测试平台之间。
3.根据权利要求1所述的人枪系统相互作用力测量装置,其特征在于,所述每个条状电容单元的驱动电极和感应电极宽度相同,驱动电极的长度大于感应电极长度,驱动电极长度两端分别预留左差位δ左和右差位δ右,b0驱=b0感+δ右+δ左,其中,b0驱为条状电容单元的驱动电极长度,b0感为条状电容单元的感应电极长度。
4.根据权利要求3所述的人枪系统相互作用力测量装置,其特征在于,所述差位δ左=δ右,且 其中d0为弹性介质厚度,G为弹性介质的抗剪模量,τmax为最大应力值。
5.根据权利要求1所述的人枪系统相互作用力测量装置,其特征在于,所述两组相互形成差动的电容单元模块的条状电容单元的驱动电极和感应电极沿宽度方向设有初始错位偏移,错位偏移大小相同、方向相反。
6.根据权利要求1所述的人枪系统相互作用力测量装置,其特征在于,所述梳齿状结构包括20个以上条状电容单元、与条状电容单元一一对应连接的引线,相邻两条状电容单元之间设有电极间距aδ。
7.根据权利要求6所述的人枪系统相互作用力测量装置,其特征在于,所述平行板面积S=M(a0+aδ)b0,其中,M为条状电容单元数量,b0为条状电容单元的长度,a0条状电容单元的宽度。
8.根据权利要求6所述的人枪系统相互作用力测量装置,其特征在于,所述电容单元模块的每个条状电容单元的引线通过并联或者独立连接到传感系统信号处理器。
9.根据权利要求1所述的人枪系统相互作用力测量装置,其特征在于,所述条状电容单元的宽度 其中,d0为弹性介质厚度,E为弹性介质的杨氏模量,G为弹性介质的抗剪模量。
10.根据权利要求1所述的人枪系统相互作用力测量装置,其特征在于,所述传感系统信号处理器和电容单元模块之间设有中间变换器,中间变换器用于设置电压对电容或频率对电容的传输系数。
说明书
技术领域
本发明涉及到运动分析技术领域,具体涉及到一种人枪系统相互作用力测量装置。
背景技术
枪械的后坐力是武器在射击过程中加在支座或人身体上的力,此力会引起支架的弹性变形,从而使枪械也随之发生位移,引起射击精度的变化,因此,后坐力的大小直接影响枪械的射击精度和射击稳定性,是枪械性能的重要参数之一,枪械后坐运动参数测试系统用来完成后坐力、后坐能量、制退器效率等参数的测试。枪械的后坐运动比较复杂,后坐力不是集中作用于轴线方向,导致测试后坐力的过程很不稳定,所以,要求在枪械后坐力的测试过程中,应尽量应用精度高、动态性能好的压力传感器,采用结构合理、装卡牢固的测试平台,但是目前的枪械后坐力测量系统的精度和灵敏度都比较低,达不到测试要求。
发明内容
为了克服以上现有技术的不足,本发明提供一种人枪系统相互作用力测量装置,采用专用夹具夹持枪械,并用三维压力传感器采集后坐运动过程中与抵肩板之间的受力,三维力传感器相比于单向正压力传感器更能完整的刻画出后坐与抵肩板的受力过程。
本发明的主要技术方案是:一种人枪系统相互作用力测量装置,包括后坐力测试平台、测力传感器和传感系统信号处理器,所述后坐力测试平台包括夹持夹具,夹持夹具与枪械之间设有弹簧阻尼机构,测力传感器设置后坐力测试平台与枪托之间,测力传感器采集枪械运动受力并发送给传感系统信号处理器,所述测力传感器包括X方向差动电容单元组合和Y方向差动电容单元组合,所述X方向差动电容单元组合和Y方向差动电容单元组合均包括两个以上相互形成差动的电容单元模块,所述电容单元模块采用由两个以上的条状电容单元组成的梳齿结构,每个条状电容单元包括上极板的驱动电极和下极板的感应电极,所述X方向差动电容单元组合和Y方向差动电容单元组合的电容值求和计算电容传感器的法向力且消除切向力影响。
所述后坐力测试平台包括前夹持夹具和后夹持夹具,前夹持夹具包括仿形夹具、带滑动轨道的支架和施加预紧力机构,仿形夹具设在支架顶部,为带弹簧阻尼的圆环铁机构,施加预紧力机构控制弹簧阻尼的压缩量,后夹持夹具包括后坐夹紧机构和抵肩板,抵肩板设置枪托后方,所述测力传感器设置抵肩板与后坐力测试平台之间。所述每个条状电容单元的驱动电极和感应电极宽度相同,驱动电极的长度大于感应电极长度,驱动电极长度两端分别预留左差位δ左和右差位δ右,b0驱=b0感+δ右+δ左,其中,b0驱为条状电容单元的驱动电极长度,b0感为条状电容单元的感应电极长度。所述差位δ左=δ右,且 其中d0为弹性介质厚度,G为弹性介质的抗剪模量,τmax为最大应力值。所述两组相互形成差动的电容单元模块的条状电容单元的驱动电极和感应电极沿宽度方向设有初始错位偏移,错位偏移大小相同、方向相反。所述梳齿状结构包括20个以上条状电容单元、与条状电容单元一一对应连接的引线,相邻两条状电容单元之间设有电极间距aδ。所述平行板面积S=M(a0+aδ)b0,其中,M为条状电容单元数量,b0为条状电容单元的长度,a0条状电容单元的宽度。所述电容单元模块的每个条状电容单元的引线通过并联或者独立连接到传感系统信号处理器。所述条状电容单元的宽度 其中,d0为弹性介质厚度,E为弹性介质的杨氏模量,G为弹性介质的抗剪模量。所述传感系统信号处理器和电容单元模块之间设有中间变换器,中间变换器用于设置电压对电容或频率对电容的传输系数。
本发明的有益效果是:本发明的枪械后坐运动受力测量装置采集到枪械后坐力,用以分析后坐力、后坐能量、制退器效率等参数的测试。另一方面,本发明的电容压力传感器,有效使用平板面积,并且通过差动等方法有效解决三维力间耦合,并利用特殊的条状电容结构,使法向与切向转换都达到较高的线性、精度与灵敏度。
附图说明
图1是本发明的具体实施方式的条状电容单元及其坐标系。
图2是本发明的具体实施方式的条状电容单元示意图。
图3是本发明的具体实施方式的条状电容单元右向偏移示意图。
图4是本发明的具体实施方式的条状电容单元左向偏移示意图。
图5是本发明的具体实施方式的条状电容单元对的初始错位图。
图6是本发明的具体实施方式的条状电容单元对受力后偏移图。
图7是本发明的具体实施方式的平行板三维力压力传感器结构图。
图8是本发明的具体实施方式的平行板三维力压力传感器驱动电极结构图。
图9是本发明的具体实施方式的平行板三维力压力传感器感应电极结构图。
图10是本发明的具体实施方式的通过相同传递系数K实现输出响应求和。
图11是本发明的具体实施方式的单元电容对的信号差动示意图。
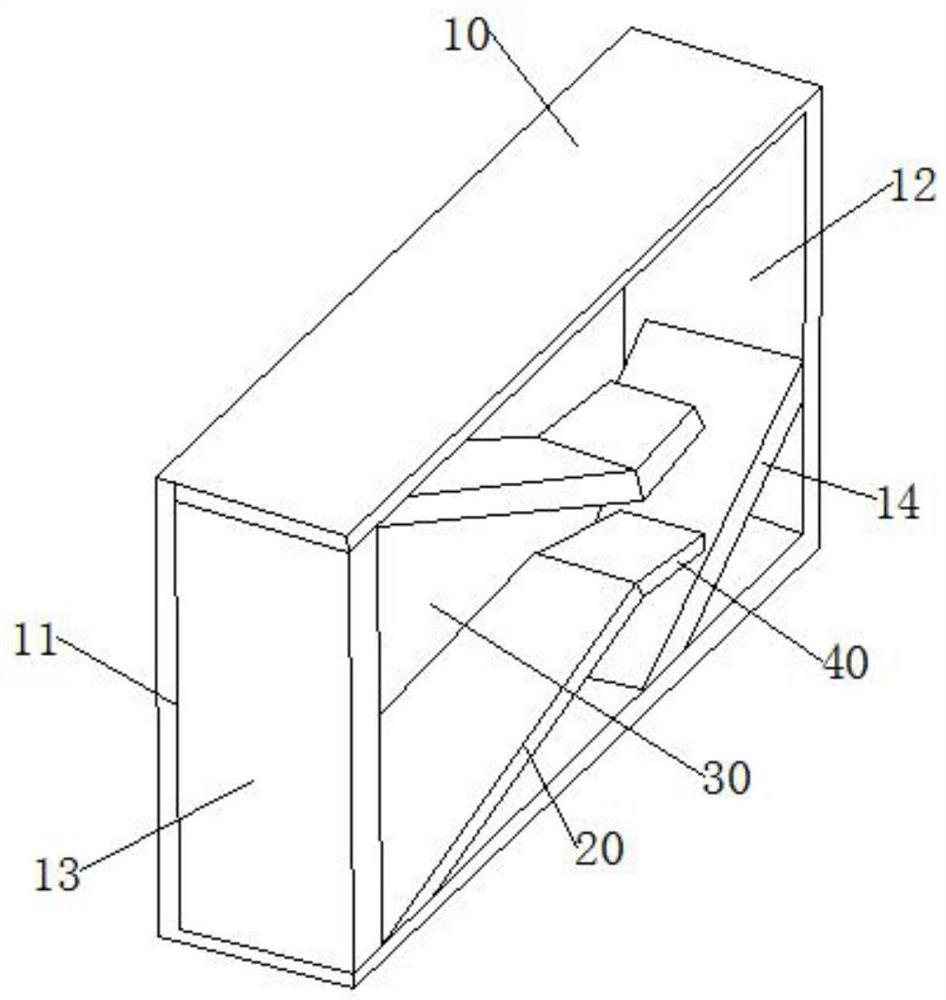
图12为本发明具体实施方式的枪械夹具结构图。
具体实施方式
下面对照附图,通过对实施例的描述,本发明的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理、制造工艺及操作使用方法等,作进一步详细的说明,以帮助本领域技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。
后坐力测试时,枪械在后坐力测试平台上进行夹持,测试平台包括基座、前夹持夹具、中间夹持夹具和后夹持夹具,前夹持夹具和中间夹持夹具相同,前夹持夹具在枪管径向约束、轴向滑动,后夹持夹具夹持枪托。前夹持夹具包括仿形夹具、带滑动轨道的支架、施加预紧力机构,仿形夹具采用上下圆环铁机构对枪管进行夹持,仿形夹具的内外圆环之间设有弹簧阻尼机构,在试验测试时,枪管夹持在内环中间,利用弹簧阻尼机构来限制枪械的运动相比于固定夹持,跟实际的枪械运动过程更为逼真,可以测量在运动过程中的三维力,支架通过滑道实现对枪体前端的支撑,预紧力的施加通过仿形夹具上的弹簧压缩量来控制。
后夹持夹具主要包括后坐夹紧机构和抵肩板,后坐夹紧机构与被测枪械的枪托部位形状相仿,枪托与后坐夹紧机构的接触部位也设有阻尼结构,以还原枪托的实际运动过程,枪托后面设置抵肩板,再在抵肩板后设置本发明的三维力传感器,这样,既没有改变枪体与人体的接触方式,又实现了对人枪系统作用力的测量。
三维测力传感器包括X方向差动电容单元组合和Y方向差动电容单元组合,所述X方向差动电容单元组合通过电容值相减计算X方向的切向力且消除Y方向切向力影响,所述Y方向差动电容单元组合通过电容值相减计算Y方向的切向力且消除X方向切向力影响,所述X方向差动电容单元组合和Y方向差动电容单元组合的电容值求和计算电容传感器的法向力且消除切向力影响。所述X方向差动电容单元组合和Y方向差动电容单元组合均包括两个以上相互形成差动的电容单元模块,所述电容单元模块采用由两个以上的条状电容单元组成的梳齿状结构,每个条状电容单元包括上极板的驱动电极和下极板的感应电极。所述每个条状电容单元的驱动电极和感应电极宽度相同,驱动电极的长度大于感应电极长度,驱动电极长度两端分别预留左差位δ左和右差位δ右,b0驱=b0感+δ右+δ左,其中,b0驱为条状电容单元的驱动电极长度,b0感为条状电容单元的感应电极长度。所述差位δ左=δ右,且 其中d0为弹性介质厚度,G为弹性介质的抗剪模量,τmax为最大应力值。所述两组相互形成差动的电容单元模块的条状电容单元的驱动电极和感应电极沿宽度方向设有初始错位偏移,错位偏移大小相同、方向相反。所述梳齿状结构包括20个以上条状电容单元、与条状电容单元一一对应连接的引线,相邻两条状电容单元之间设有电极间距aδ。所述平行板面积S=M(a0+aδ)b0,其中,条M为条状电容单元数量,b0为条状电容单元的长度,a0条状电容单元的宽度。所述电容单元模块的每个条状电容单元的引线通过并联或者独立连接到传感系统信号处理器。所述条状电容单元的宽度 其中,d0为介质厚度,E为弹性介质的杨氏模量,G为弹性介质的抗剪模量。所述传感系统信号处理器和电容单元模块之间设有中间变换器,中间变换器用于设置电压对电容或频率对电容的传输系数。
1、条状电容单元的转换特性
(1)激励信号和坐标系
将条状电容单元置于图1所示的直角坐标系中,极板平面长度b0、宽度a0、弹性介质厚度d0。三维激励施加于电容极板的外表面,产生的接触式作用力具有Fx、Fy和Fz三个方向分量,Fx和Fy的作用方向沿X轴和Y轴,Fz的作用方向沿OZ轴,即 方向,法向和切向应力均为一种应力张量,从电极的引线间即可输出电容的响应;法向应力σn=Fn/A,其中A=a0·b0为极板法向受力面,Fn=Fz为法向分量;两侧表面上产生成对的切向应力τx=Fx/A,τy=Fy/A。
根据弹性力学中的虎克定律,σn和τx,τy都将使弹性体产生相应的变形。其中,
式中,E为弹性介质的杨氏模量(单位:GN/m2),G为弹性介质的抗剪模量(单位:GN/m2),δn为弹性介质的法向位移(单位:μm),而δx和δy为条状电容单元上下两极板的相对错位(单位:μm),其正负号由坐标轴指向决定。
(2)电容公式及其输入输出特性
矩形平行板电容器的初始电容为:
式中,ε0真空介质电常数为8.85PF/m,εr=2.5为电介质的相对介电常数。d0受σn的激励产生相对变形εn=δn/d0=σn/E,代入(4)得到输入输出特性
(3)法向应力作用下的线性度和灵敏度
a、法向线性度
在(5)式中Fn在分母中,故Cn=f(Fn)的关系是非线性的,因转换量程中的最大值σnmax与介质弹性常数E相比,εn是个很小的量,即分母中εn<<1,将(5)按级数展开并略去二次方以上的高阶无穷小,(5)式可简化为:
可见在Cn与Fn的转换特性中的法向线性度的最大相对误差接近于零。
b、灵敏度
按法向灵敏度的定义
按(6)式可得线性灵敏度,
Sn1=C0/AE=ε0εr/d0E (7)
而按(5)式则
Sn2随Fn而变,Fn愈大,Sn2愈大,在整个转换特性上呈轻微非线性。
(4)切向应力τx和τy激励下的电容变化
切向应力τx和τy并不改变极板的几何尺寸参数b0和a0,对介质厚度d0也不产生影响。然而τx和τy改变了平行板电容器的空间结构,正向面对的上下极板之间发生了错位偏移。现以OX方向为例,极板在τx作用下的错位偏移δx。
在图2中当τx为零时,a0上=a0下是正对的,基板之间有效截面Aτ=a0·b0;在图3中,在τx右向的作用下,上极板相对于下极板产生了向右的错位偏移δx,从而使上下极板之间在计算电容时的有效面积Aτ=(a0-δx)·b0;图4中,当τx为左向时,错位偏移δx则向左,而Aτ=(a0-δx)·b0,有效面积的减少量相同,由此产生的电容为:
根据剪切虎克定律
τx=γx·G=G·δx/d0 (10)
将(10)代入(9)可得
(11)式即为切应力下的输入——输出特性,Cτ与τx呈线性关系。
而其灵敏度
公式(9)-(12)类似的分析同样适用与τy与Cτy的特性与技术指标,只不过式中条状电容单元的长边b0应设置于OX轴方向,而其短边a0则在OY方向。
(5)差动电容单元的引进
图3和图4所示的电容器结构性变化,只说明电容输出与切向应力±τx输入的关系,电容增量都是负的,因此这种初始电容结构不适宜作为对±τx得到增减电容的响应。为此本发明对电容器上下极板的初始结构进行调整,构成一对差动电容对(CL与CR),具体如图5所示。
图5中,一对电容CL和CR电极尺寸a0、b0、d0均相同,初始错位偏移δ0也相同,区别在于左边电容器CL上层δ0尖角的指向为+OX,而右边电容器CR上层δ0尖角指向-OX。
当τx=0时, 即图中阴影部分所对应的电容,在此基础上如在-Fx激励下产生±δx的错误偏移,形成如图6所示的电容增减效果。
图6中CL和CR差动电容对同一个τx将产生±δx和±ΔCτ的响应。
δ0的大小应满足 可取δ0=10μm,由此,公式(11)可修改为
式中, 为切应力为零时的初始电容,(14)式即为切应力输入输出特性,Cτx与Fx是线性关系,而其灵敏度
2、接触式平行板电容设计
(1)平行板电容的平面设计
参见图7、图8和图9中的电极平面布置,在一个10×10mm2的基板中心作十字分隔,形成四个象限Ⅰ、Ⅱ、Ⅲ、Ⅳ,其中Ⅰ、Ⅱ象限为对τx做出响应的差动电容单元组合,而Ⅲ、Ⅳ象限为对τy做出响应的差动电容单元组合。外围线为10×10mm2的PCB板四根边缘线,对PCB基板应精确切割以保证形状和尺寸上的精准。影线部分表示失蜡铸造工艺的外模截面,其几何形状和尺寸也应在机械成型时保持精准,为脱模方便并可拼拆,更应维持尺寸精度,最终以保证消除三维力对电容响应的相互干扰。
电容单元模块采用由两个以上的条状电容单元组成的梳齿状结构,每个条状电容单元包括上极板的驱动电极和下极板的感应电极。由公式(12)a0愈小,切向应力响应的灵敏度越大,故单个电容均为长条状。设每根条状电容单元宽为a0,两条状电容单元之间的槽宽为aδ,则每根条状电容单元的节距为a0+aδ。为了充分利用方形基板的平面空间,使M(a0+aδ)b0≈1方形基板表面积,M为4个象限内的条状电容单元数,则有M(a0+aδ)=2*10mm,式中,槽宽aδ不宜过大,否则不利于使用基板上的有效平面空间,也不宜过小,要受到失蜡铸造工艺的约束。为使法向灵敏度Sn和切向灵敏度Sτ相同,按公式(7)和(12),令a0·G=d0·E,当d0=0.1mm时,则a0=0.15mm,若令aδ=0.05mm,则M=100,每个象限有25个条状电容单元。
为了实现τx和τy切向响应之间不相互产生影响,驱动电极长度两端预留δ0,因此b0驱=b0底+2·δ0,其中在b0驱两端长度预留理论上应保证 其计算值为
为了实现τx和τy不对法向电容响应产生任何影响,每个条状电容单元的驱动电极与感应电极在各象限中的平面布置应保证一定的错位偏移,通过差动消除影响,取感应电极在下层PCB基板上的位置作为参照,则驱动电极在上层PCB基板上的布置应以PCB基板边缘线为基准。图中四个虚线方框为感应电极在下极板上的基准。而置他们与几何基准线差距均为δ0(0.1mm),以保证τx在Ⅰ、Ⅱ象限电容单元产生差动电容输出响应,而在Ⅲ、Ⅳ象限电容单元则产生对τy的差动电容响应,设置一个初始错位偏移δxo,其取值应保证 其计算值与δ0类似,其初始错位偏移均设置δxo=δyo=0.01mm,以保证四个象限中的电容单元在τx和τy切向激励下能产生两组差动电容对。在图6中CτxI=CR和CτxII=CL为转换τx的差动电容对,而CτxIII=CL和CτxIV=CR则为转换τy的差动电容对。
(2)法向应力计算
由公式(6)可改写单个电容器的法向响应电容
其中,i=Ⅰ、Ⅱ、Ⅲ、Ⅳ,因每个象限中,N指一个象限内的条状电容单元的数量,N个条状电容单元是并联。
如再将其求和,可得
上式即为σn的电容总响应。
尽管单个电容的求和可通过电极引线的并联连接实现。但一旦并接好,就不再能实现求差组合,故实际的求和组合要通过中间变换器的输出再求和,见图10,求和的信号流程框图中,中间变换器K可以是电压对电容或频率对电容的传输系数,从而完成对法向响应的合成。
(3)切向应力计算
CⅠ对CⅡ和CⅢ对CⅣ可以实现两对差动组合,见图11,经差动技术处理,差动输出的总响应
上式中,无论是法向激励Fn或切向激励Fy均不对Oτx产生影响。即自动消除了σn和τy对τx的总输出的耦合或干扰,因为凡是在信号包含相减的运算中,等量和同符合的电容变化都自动消除。而Fy和Fx对σn的干扰可通过上层电极在b0方向增加几何长度2δ0消除,Oτy同理可求。
(4)主要材料选择及其特性参数
梳齿状平行板电容器的极板距d0=0.1mm,上下基板内侧空间除铜箔电极外,均为用失蜡铸造法充填的PDMS(聚二甲基硅氧烷)超弹绝缘介质。其机械和物理特性参数为杨氏模量E=6.2MPa,而其抗剪弹性模量为G=4.1MPa,介质极化时相对介电常数εγ=2.5。由于介质的E和G远小于铜的弹性模量E铜=103GPa。故电容器内部介质在应力状态下的变形远大于极板的变形。
(5)电极引线设计
无论是驱动电极或感应电极都需备有引出线,考虑各个驱动电极在信号电平上都是接地的,故四组驱动电极只需共用同一个引出线。而四个电容单元模块感应电极则需用各自独立的引出线,于是整个电容组件共有至少5个管脚从平面封装的侧面引出,以便整个组件顶部与底部外表面能方便地与测量对象接触。
本发明在新材料和新工艺的支撑下,完成了一种新型三维力敏感电容组合的设计,在10×10mm2的受力面上,无论是法向或切向,都可向介质较均匀的传递应力。文中四个单元电容呈两对组合分布。在空间力与传感器表面的接触中外力只有1个,电容响应却有4个,对4个电容求和可得到法向Fn的信息,即整个电极板都对求Fn做出贡献,同时将两对电容组合组成差动系统,又可获得Fx和Fy的信息,从而完整描述一个三维力。
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。本发明的保护范围应该以权利要求书所限定的保护范围为准。
人枪系统相互作用力测量装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0