









专利摘要
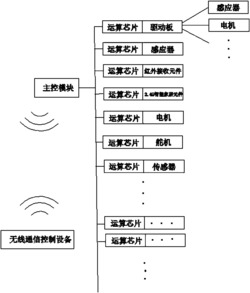
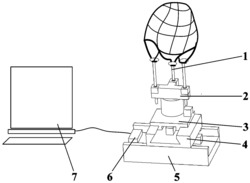
本实用新型公开了手部辅助康复机器人,属于康复设备技术领域,包括康复手套以及由多个柔性弯曲传感器、ADC数字转换器、第一STM32单片机和无线信号发射模块组成的动作感应器,还包括机械手本体以及由无线信号接收模块、第二STM32单片机以及AVR处理器组成的动作执行器,多个柔性弯曲传感器分别与康复手套的手指部固定连接,柔性弯曲传感器的信号输出端与ADC数字转换器电性连接,ADC数字转换器的输出端与第一STM32单片机的I/O接口电性连接。本实用新型,能够实现机械手指对人手指动作的映射与模拟,而且由患者自主控制康复训练动作,无需理疗师操作控制,进一步增强了康复效果,有利于辅助患者恢复患肢。
权利要求
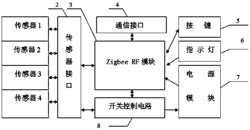
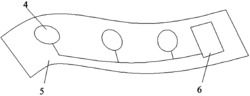
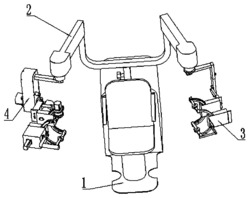
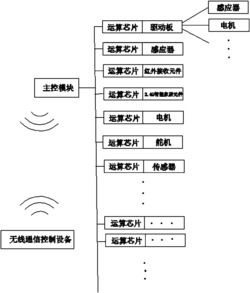
1.手部辅助康复机器人,其特征在于,包括康复手套(2)以及由多个柔性弯曲传感器(5)、ADC数字转换器(6)、第一STM32单片机(7)和无线信号发射模块(8)组成的动作感应器(1),还包括机械手本体(3)以及由无线信号接收模块(9)、第二STM32单片机(10)以及AVR处理器(11)组成的动作执行器(4),多个所述柔性弯曲传感器(5)分别与康复手套(2)的手指部固定连接,所述柔性弯曲传感器(5)的信号输出端与ADC数字转换器(6)电性连接,所述ADC数字转换器(6)的输出端与第一STM32单片机(7)的I/O接口电性连接,所述无线信号发射模块(8)与第一STM32单片机(7)电性连接,所述无线信号接收模块(9)与第二STM32单片机(10)的I/O接口电性连接,所述AVR处理器(11)的输入端与第二STM32单片机(10)的I/O接口电性连接,所述AVR处理器(11)的输出端与机械手本体(3)上伺服微电机的电力输入端电性连接。
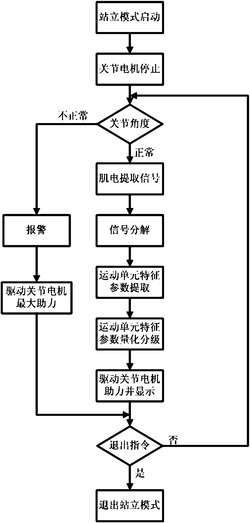
2.根据权利要求1所述的手部辅助康复机器人,其特征在于,所述第一STM32单片机(7)使用ADC数字转换器(6)采集柔性弯曲传感器(5)采集到的手指弯曲数据,经过卡尔曼滤波算法进行计算,得出手指的运动角度与位置的数据,对数据打包后使用第一STM32单片机(7)写入的MQTT协议进行封装,所述第一STM32单片机(7)通过无线信号发射模块(8)将封装后的数据传输至无线信号接收模块(9)。
3.根据权利要求1所述的手部辅助康复机器人,其特征在于,所述无线信号接收模块(9)与第二STM32单片机(10)电性连接建立通讯,所述第二STM32单片机(10)收到无线信号接收模块(9)的信号后,将柔性弯曲传感器(5)采集的信号传输至AVR处理器(11),所述AVR处理器(11)将信号对应传输至机械手本体(3)上的伺服微电机。
4.根据权利要求3所述的手部辅助康复机器人,其特征在于,所述机械手本体(3)上的AVR处理器(11)对第二STM32单片机(10)传输的数据进行解压分析,分析后通过各通信串口实时输出PWM波,输出的PWM波控制机械手本体(3)上各个舵机伺服微电机运动。
手部辅助康复机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0