










专利摘要
本发明公开了一种基于折纸工艺与增材制造技术结合的新型立体书,包括封面、活动书页、各种用于呈现机械工程学科经典机构和现代机构案例的立体模型以及封底等,立体模型的部分零部件通过增材制造技术由柔性材料制成,部分零部件由纸件制成。立体模型通过柔性材料配合折纸工艺,尤其利用了柔性材料零部件的柔性铰链、柔性凹槽等结构的物理特性,实现了涉及绳驱动、材料折叠压缩以及机构运动组合等特征变形的模型一体化构造的制作方法,能够大幅减少本发明的总体质量和总体尺度,尤其厚度尺度,立体模型包括变节距齿轮汽车转向机构模型、绳驱动连续体机器人模型以及水面清洁折叠环保船模型等,均具有可折叠、可压缩、自回复、组件可回收特点。
权利要求
1.一种基于折纸工艺与增材制造技术结合的新型立体书,具有多个活动书页,其特征在于,包括:
立体模型,该立体模型包括变节距齿轮汽车转向机构模型和绳驱动连续体机器人模型,包含:
支撑件,设置在所述活动书页的表面上,用于通过折叠相对于所述活动书页进行运动;
功能辅助件,为柔性材料通过增材制造技术制成,设置在所述支撑件上,所述功能辅助件用于相对于所述支撑件进行运动;以及
其它辅助件,
其中,当所述立体模型为所述变节距齿轮汽车转向机构模型时:
所述功能辅助件包含方向盘、齿轮连杆、中空转向齿轮、变节距齿条连杆、转向连杆以及车轮,
所述转向连杆包含第一转向连杆和第二转向连杆,所述第一转向连杆和所述第二转向连杆均为具有一处弯折的杆,
所述车轮包含第一车轮和第二车轮,
所述支撑件粘接所述活动书页的表面上,包含第二支撑件,
所述其它辅助件包含固定杆,粘接在所述第二支撑件上,
所述第一转向连杆的一端和所述第二转向连杆的一端均分别与所述变节距齿条连杆的两端铰接,所述第一转向连杆的弯折处和所述第二转向连杆的弯折处均分别与所述固定杆的两端铰接,从而使得第一转向连杆的一段、所述第二转向连杆的一段、所述变节距齿条连杆以及所述固定杆形成了一个等腰梯形连杆机构,
所述第一车轮和所述第二车轮均分别铰接在所述第一转向连杆的另一端和所述第二转向连杆的另一端,
所述中空转向齿轮与所述变节距齿条连杆啮合连接,所述中空转向齿轮具有可压缩通孔,该可压缩通孔具有齿轮内卡槽,该齿轮内卡槽为柔性铰链,用于在所述中空转向齿轮受压时进行收缩,
所述齿轮连杆设置在第二支撑件上,所述齿轮连杆的一端与所述中空转向齿轮的一个端面固定连接,
所述方向盘连接在所述齿轮连杆的另一端,
当所述立体模型为绳驱动连续体机器人模型时:
所述功能辅助件包含多个且相互平行的机器人支撑件、多个相同的弹簧和多个相同的支撑连接件,
所述支撑件同时粘接在所述活动书页 上,包含机器人支撑脚,
所述其它辅助件包含伸缩牵引绳和转向牵引绳,
所述伸缩牵引绳沿所述弹簧的轴线设置,穿过所有所述弹簧、所有所述支撑连接件以及多个所述机器人支撑件并安装在位于所述绳驱动连续体机器人模型的一端的所述机器人支撑件上,
所述弹簧设置在相邻的两个所述机器人支撑件之间,并且所有所述弹簧的轴线均相同,
所述支撑连接件设置在相邻的两个所述机器人支撑件之间,所有所述支撑连接件在所述弹簧的轴线上均匀分布,并且分别设置在相邻的两个所述弹簧之间,
所述伸缩牵引绳用于通过向预定方向拉动使得所述弹簧压缩,
所述机器人支撑件具有两条弯折通槽,构成柔性铰链,该弯折通槽的长度方向与所述活动书页 平行,并且所述弯折通槽的槽口朝向与所述预定方向相反,
当所述机器人支撑脚所在所述活动书页合拢时,所述弯折通槽用于使所述机器人支撑件沿所述弯折通槽压缩在所述活动页面上,从而使得所述绳驱动连续体机器人模型被收缩,
所有所述机器人支撑件均安装在所述转向牵引绳上。
2.根据权利要求1所述基于折纸工艺与增材制造技术结合的新型立体书,其特征在于:
其中,当所述立体模型为所述变节距齿轮汽车转向机构模型时:
所述功能辅助件还包含两个万向节和转向杆,所述两个万 向节用于实现变角度动力传递,
所述方向盘通过所述两个万向节和所述转向杆连接在所述齿轮连杆的另一端,
当在所述方向盘上施加预定转矩时,所述两个万向节将所述预定转矩传递至所述转向杆上,从而驱动所述齿轮连杆绕自身轴线进行转动。
3.根据权利要求1所述基于折纸工艺与增材制造技术结合的新型立体书,其特征在于:
其中,当所述立体模型为绳驱动连续体机器人模型时:
所述机器人支撑件呈圆形,所有所述机器人支撑件的轴线均相同,
所述转向牵引绳的数量为三条,围绕所述机器人支撑件的轴线均匀分布。
4.根据权利要求1所述基于折纸工艺与增材制造技术结合的新型立体书,其特征在于:
其中,当所述立体模型为绳驱动连续体机器人模型时:
所述支撑连接件呈球状。
5.根据权利要求1所述基于折纸工艺与增材制造技术结合的新型立体书,其特征在于:
其中,当所述立体模型为绳驱动连续体机器人模型时:
其它辅助件还包含光源和镜头,
所述光源和所述镜头设置在端部的机器人支撑件的表面上,用于模拟提供在封闭区域中的照明。
6.根据权利要求1所述基于折纸工艺与增材制造技术结合的新型立体书,其特征在于:
其中,立体模型还包括水面清洁折叠环保船模型,
当所述立体模型为水面清洁折叠环保船模型时:
所述功能辅助件包含船桨轴和船桨,
所述船桨包含第一船桨和第二船桨,
所述支撑件包括船身、第三支撑件以及第四支撑件,
所述其它辅助件包含第一固定架和第二固定架,
所述第三支撑件和所述第四支撑件分别对应粘接在两个相邻的所述活动书页 的表面上,并且所述第三支撑件的一端和所述第四支撑件的一端均与所述船身粘接,所述第四支撑件含有三个折叠面,即三个折纸转动副相交于一点,用于沿任意方向转动,提供转动适应性,
所述第一固定架的一端和所述第二固定架的一端均与所述船身粘接,所述第一固定架的另一端和所述第二固定架的另一端均套设在所述船桨轴上,
所述第一船桨和所述第二船桨分别设置在所述船桨轴的两端。
7.根据权利要求6所述基于折纸工艺与增材制造技术结合的新型立体书,其特征在于:
其中,所述功能辅助件还包含水草传送板,
所述水草传送板包含第一水草传送板和第二水草传送板,
所述第一水草传送板和所述第二水草传送板的表面均具有可移动的履带,
所述第一水草传送板和所述第二水草传送板分别铰接在所述船身的两端。
8.根据权利要求1所述基于折纸工艺与增材制造技术结合的新型立体书,其特征在于,还包括:
封面和封底,
垫高件,择一地设置在所述封面和所述封底的表面且朝向所述立体书内部设置。
9.根据权利要求1所述基于折纸工艺与增材制造技术结合的新型立体书,其特征在于:
其中,所述支撑件为纸件或增材制造件。
10.权利要求6-7任意一项所述基于折纸工艺与增材制造技术结合的新型立体书在教学示教中的应用,其特征在于:
通过翻开所述基于折纸工艺与增材制造技术结合的新型立体书,展开所述立体模型,从而进行教学示教,
所述立体模型用于呈现机械工程学科经典机构和现代机构案例,包含:
变节距齿轮汽车转向机构模型、绳驱动连续体机器人模型、水面清洁折叠环保船模型以及平面曲线缩放仪机构模型。
说明书
技术领域
本发明属于教具领域,具体涉及一种基于折纸工艺与增材制造技术结合的新型立体书。
背景技术
目前,对于工科教学所面临的机遇和挑战,尤其近期新冠疫情引发对线上教学的严峻考验,采取以互联网辅以半物理和物理模型教具展示的线上示教方式越来越成为实现非现场授课的一种有效的解决方案。
对于大多数受学者来说,机械原理等工科学科所涉及的知识抽象,在没有具体的事例演示下进行理解并掌握是比较困难的,现有的机械教学课程主要采用PPT演示辅以机械模型展示。
机械模型因为体积大、构成零部件数量多、不易携带,因此造成的上课准备工作非常繁琐,且一些复杂机构的实体模型需进行拆装,不适合频繁搬运及展示;单纯的PPT演示又使得教学不够生动,与实际机构观感和触感脱节。而现有立体书因为形成模型的纸件仅能折叠或是展开,以至于不能动态的体现机械零件间的相互运动关系,导致现有的立体书对机械原理机构及现代机构的案例不能进行生动的展示,从而大大降低示教的效果。
发明内容
针对现有技术的不足,本发明提供一种基于折纸工艺与增材制造技术结合的新型立体书,采用功能辅助件表示现代机构的案例中的相关功能运动件,克服了以往的立体书仅对片状预设件进行拖、掀使得预设件进行折叠或展开来模拟各种模型的这一方式的技术偏见,从而能够通过立体书动态地体现机械零件间的相互运动关系,对机械原理机构及现代机构的案例进行生动的展示,进而大大提高了示教的效果,使得学生更加有沉浸感,教师上课准备工作更有趣、更具个性化和探索性,教与学互相促动,生动而极具现实意义,而且通过柔性材料配合折纸工艺,尤其利用了柔性材料零部件的柔性铰链、柔性凹槽等结构的物理特性,实现了涉及绳驱动、材料折叠压缩以及机构运动组合等特征变形的模型一体化构造的制作方法,从而能够大幅减少本发明总体质量和总体尺度,尤其厚度尺度。
为实现上述目的,本发明提供了如下技术方案为:
一种基于折纸工艺与增材制造技术结合的新型立体书,具有多个活动书页,其特征在于,包括:立体模型,立体模型包括变节距齿轮汽车转向机构模型和绳驱动连续体机器人模型,包含:支撑件,设置在活动书页的表面上,用于通过折叠相对于活动书页进行运动;功能辅助件,为柔性材料通过增材制造技术制成,设置在支撑件上,功能辅助件用于相对于支撑件进行运动;以及其它辅助件,其中,当立体模型为变节距齿轮汽车转向机构模型时:功能辅助件包含方向盘、齿轮连杆、中空转向齿轮、变节距齿条连杆、转向连杆以及车轮,转向连杆包含第一转向连杆和第二转向连杆,第一转向连杆和第二转向连杆均为具有一处弯折的杆,车轮包含第一车轮和第二车轮,支撑件粘接活动页面的表面上,包含第二支撑件,其它辅助件包含固定杆,粘接在第二支撑件上,第一转向连杆的一端和第二转向连杆的一端均分别与变节距齿条连杆的两端铰接,第一转向连杆的弯折处和第二转向连杆的弯折出均分别与固定杆的两端铰接,从而使得第一转向连杆的一段、第二转向连杆的一段、变节距齿条连杆以及固定杆形成了一个等腰梯形连杆机构,第一车轮和第二车轮均分别铰接在第一转向连杆的另一端和第二转向连杆的另一端,中空转向齿轮与变节距齿条连杆啮合连接,中空转向齿轮具有可压缩通孔,可压缩通孔具有齿轮内卡槽,齿轮内卡槽为柔性铰链,用于在中空转向齿轮受压时进行收缩,齿轮连杆设置在第二支撑件上,齿轮连杆的一端与中空转向齿轮的一个端面固定连接,方向盘连接在齿轮连杆的另一端,当立体模型为绳驱动连续体机器人模型时:功能辅助件包含多个且相互平行的机器人支撑件、多个相同的弹簧和多个相同的支撑连接件,支撑件同时粘接在活动页面上,包含机器人支撑脚,其它辅助件包含伸缩牵引绳和转向牵引绳,伸缩牵引绳沿弹簧的轴线设置,穿过所有弹簧、所有支撑连接件以及多个机器人支撑件并安装在位于绳驱动连续体机器人模型的一端的机器人支撑件上,弹簧设置在相邻的两个机器人支撑件之间,并且所有弹簧的轴线均相同,支撑连接件设置在相邻的两个机器人支撑件之间,所有支撑连接件在弹簧的轴线上均匀分布,并且分别设置在相邻的两个弹簧之间,伸缩牵引绳用于通过向预定方向拉动使得弹簧压缩,机器人支撑件具有两条弯折通槽,构成柔性铰链,弯折通槽的长度方向与活动页面平行,并且弯折通槽的槽口朝向与预定方向相反,当机器人支撑脚所在活动书页合拢时,弯折通槽用于使机器人支撑件沿弯折通槽压缩在活动页面上,从而使得绳驱动连续体机器人模型被收缩,所有机器人支撑件均安装在转向牵引绳上。
优选地,当立体模型为变节距齿轮汽车转向机构模型时:功能辅助件还包含两个万向节和转向杆,两个方向节用于实现变角度动力传递,方向盘通过两个万向节和转向杆连接在齿轮连杆的另一端,当在方向盘上施加预定转矩时,两个万向节将预定转矩传递至转向杆上,从而驱动齿轮连杆绕自身轴线进行转动。
优选地,当立体模型为绳驱动连续体机器人模型时:机器人支撑件呈圆形,所有机器人支撑件的轴线均相同,转向牵引绳的数量为三条,围绕机器人支撑件的轴线均匀分布。
优选地,当立体模型为绳驱动连续体机器人模型时:支撑连接件呈球状。
优选地,当立体模型为绳驱动连续体机器人模型时:其它辅助件还包含光源和镜头,光源和镜头设置在端部的机器人支撑件的表面上,用于模拟提供在封闭区域中的照明。
优选地,立体模型还包括水面清洁折叠环保船模型,当立体模型为水面清洁折叠环保船模型时:功能辅助件包含船桨轴和船桨,船桨包含第一船桨和第二船桨,支撑件包括船身、第三支撑件以及第四支撑件,其它辅助件包含第一固定架和第二固定架,第三支撑件和第四支撑件分别对应粘接在两个相邻的活动页面的表面上,并且第三支撑件的一端和第四支撑件的一端均与船身粘接,第四支撑件含有三个折叠面,即三个折纸转动副相交于一点,用于沿任意方向转动,提供转动适应性,第一固定架的一端和第二固定架的一端均与船身粘接,第一固定架的另一端和第二固定架的另一端均套设在船桨轴上,第一船桨和第二船桨分别设置在船桨轴的两端。
进一步地,功能辅助件还包含水草传送板,水草传送板包含第一水草传送板和第二水草传送板,第一水草传送板和第二水草传送板的表面均具有可移动的履带,第一水草传送板和第二水草传送板分别铰接在船身的两端。
优选地,立体书还包括封面和封底,垫高件,择一地设置在封面和封底的表面且朝向立体书内部设置。
优选地,支撑件为纸件或增材制造件。
基于折纸工艺与增材制造技术结合的新型立体书在教学示教中的应用,其特征在于:通过翻开基于折纸工艺与增材制造技术结合的新型立体书,展开立体模型,从而进行教学示教,立体模型用于呈现机械工程学科经典机构和现代机构案例,包含:变节距齿轮汽车转向机构模型、绳驱动连续体机器人模型、水面清洁折叠环保船模型以及平面曲线缩放仪机构模型。
与现有技术相比,本发明的有益效果是:
1.因为本发明的立体模型通过柔性材料配合折纸工艺,尤其利用了柔性材料零部件的柔性铰链、柔性凹槽等结构的物理特性,实现了涉及绳驱动、材料折叠压缩以及机构运动组合等特征变形的模型一体化构造的制作方法,立体模型包括变节距齿轮汽车转向机构模型、绳驱动连续体机器人模型以及水面清洁折叠环保船模型,因此,本发明克服了以往技术中仅通过实物模型展示或者对片状预设件进行拖、掀使得预设件进行折叠或展开来实现示教的这一方式的技术偏见,从而能够通过立体书动态地体现机械零件间的相互运动关系,对机械原理机构及现代机构的案例进行生动的展示,进而大大提高了示教的效果,使得学生更加有沉浸感,教师上课准备工作更有趣、更具个性化和探索性,教与学互相促动,生动而极具现实意义,而且通过柔性材料配合折纸工艺,尤其利用了柔性材料零部件的柔性铰链、柔性凹槽等结构的物理特性,实现了涉及绳驱动、材料折叠压缩以及机构运动组合等特征变形的模型一体化构造的制作方法,从而能够大幅减少本发明总体质量和总体尺度,尤其厚度尺度。
2.因为本发明的立体模型为变节距齿轮汽车转向机构模型时:功能辅助件还包含两个万向节和转向杆,两个方向节用于实现变角度动力传递,方向盘通过两个万向节和转向杆连接在齿轮连杆的另一端,所以,当在方向盘上施加预定转矩时,两个万向节将预定转矩传递至转向杆上,从而驱动齿轮连杆绕自身轴线进行转动,进而能够对变节距齿轮汽车转向机构进行更生动地示教。
3.因为本发明的立体模型为绳驱动连续体机器人模型时:机器人支撑件呈圆形,所有机器人支撑件的轴线均相同,转向牵引绳的数量为三条,围绕机器人支撑件的轴线均匀分布,所以,拉动转向牵引绳能够使得绳驱动连续体机器人模型朝向三个方向弯曲转向。
4.因为本发明的立体模型为绳驱动连续体机器人模型时:其它辅助件还包含光源和镜头,光源和镜头设置在端部的机器人支撑件的表面上,用于模拟提供在封闭区域中的照明,所以,本发明的立体模型能够模拟应用于活体内部手术操作的绳驱动连续体机器人端部的用于封闭区域的照明的照明装置,从而能够对绳驱动连续体机器人进行更生动地进行示教。
5.因为本发明的立体模型还包括水面清洁折叠环保船模型,当立体模型为水面清洁折叠环保船模型时:第四支撑件含有三个折叠面,即三个折纸转动副相交于一点,用于沿任意方向转动,提供转动适应性,所以,本发明的水面清洁折叠环保船模型能够通过合拢所在的两个相邻地活动书页,借助第四支撑件的折叠,更简便地折叠在活动书页上,且具有更薄的厚度。
6.因为本发明的立体模型为立体模型为水面清洁折叠环保船模型时:功能辅助件还包含水草传送板,水草传送板包含第一水草传送板和第二水草传送板,第一水草传送板和第二水草传送板的表面均具有可移动的履带,第一水草传送板和第二水草传送板分别铰接在船身的两端,所以本发明的立体模型能够模拟水面清洁折叠环保船的用于传送水草的履带式水草传动装置,从而能够对水面清洁折叠环保船进行更生动地进行示教。
7.因为本发明的基于折纸工艺与增材制造技术结合的新型立体书还包括封面和封底,垫高件,择一地设置在封面和封底的表面且朝向立体书内部设置,因此,在立体书合拢时,封面和封底能够保持预定的距离,从而避免立体模型在合拢的立体书受压时因受力而损坏。
附图说明
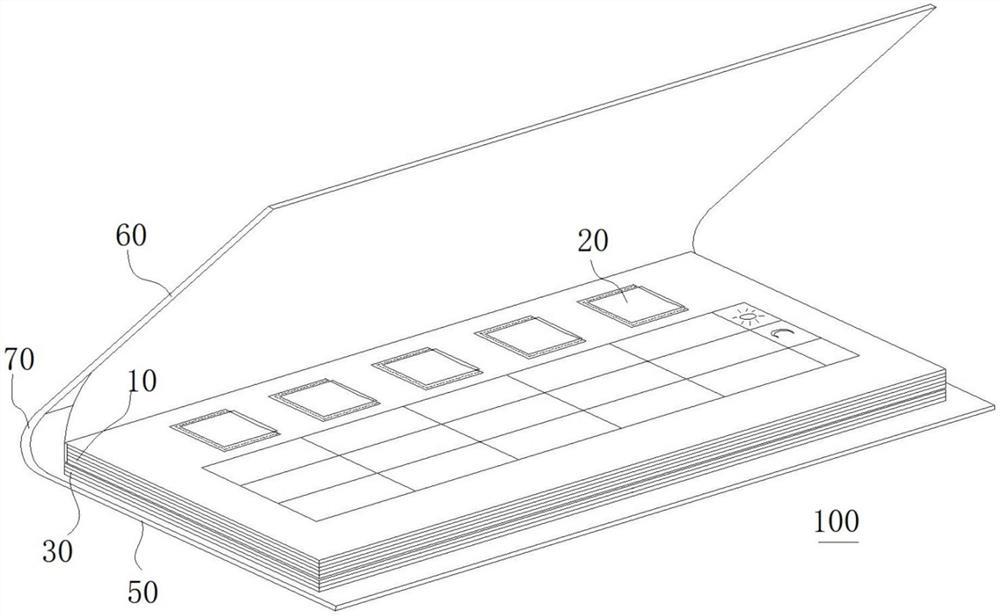
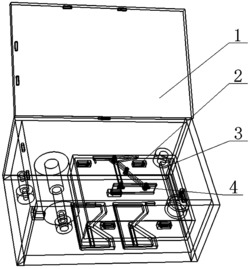
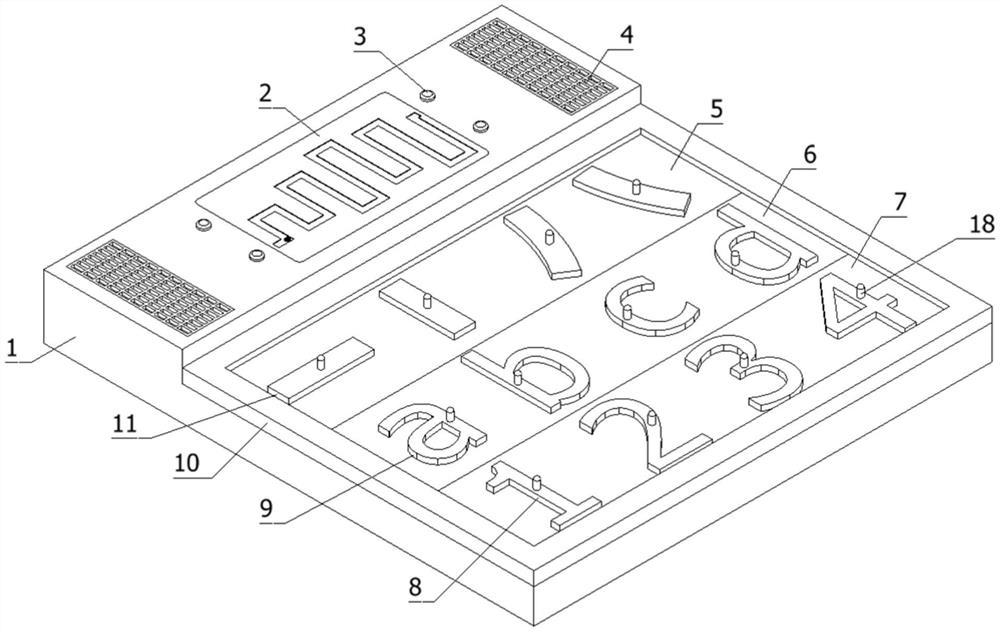
图1为本发明的实施例的基于折纸工艺与增材制造技术结合的新型立体书的示意图;
图2为本发明的实施例的活动书页展开状态示意图;
图3为本发明的实施例的平面曲线缩放仪机构模型的示意图;
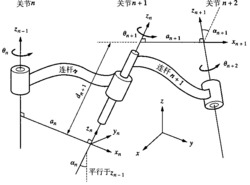
图4为本发明的实施例的铰链关节的示意图;
图5为本发明的实施例的变节距汽车转向机构模型展开状态示意图;
图6为本发明的实施例的变节距汽车转向机构模型车轮折叠状态示意图;
图7为本发明的实施例的中空转向齿轮的结构示意图;
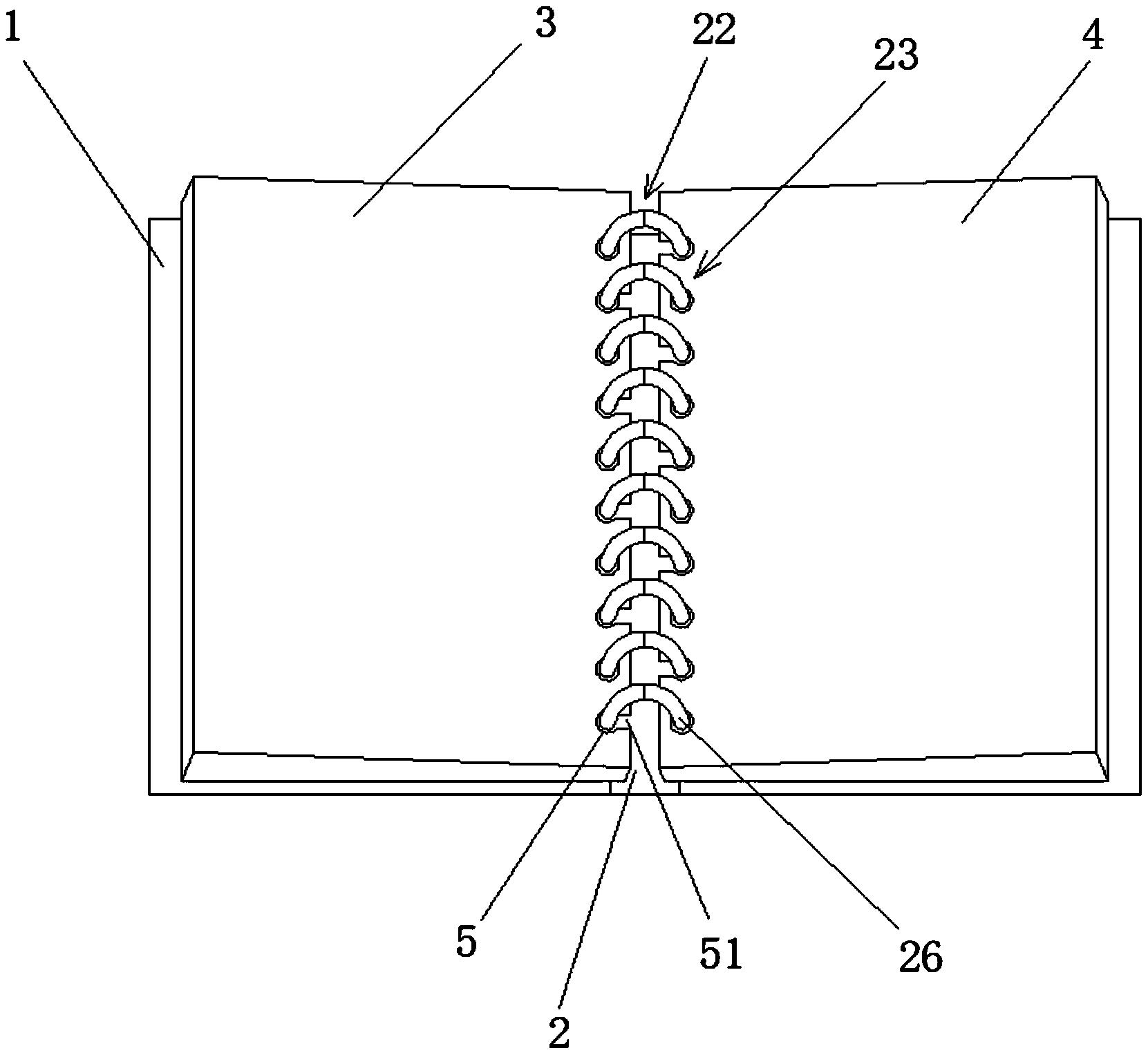
图8为本发明的实施例的绳驱动连续体机器人模型展开状态示意图;
图9为本发明的实施例的机器人支撑件的俯视图;
图10为本发明的实施例的机器人支撑件的正视图;
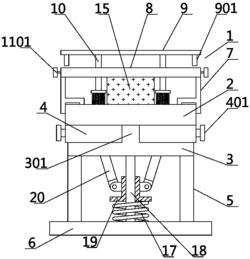
图11为本发明的实施例的绳驱动连续体机器人模型折叠状态示意图;
图12为本发明的实施例的水面清洁折叠环保船模型示意图;以及
图13为本发明的实施例的第四支撑件的折叠示意图。
图中:1000、立体书,A1、封面,A2、封底,A3、磁体,A4、磁扣,A5、垫高件,A6、活动书页,100、平面曲线缩放仪机构模型,111、第一支撑件,121A、第一联动杆,121B、第二联动杆,121C、第三联动杆,122A、第一铰链关节,122B、第二铰链关节,122C、第三铰链关节,122D、第四铰链关节,200、变节距齿轮汽车转向机构模型,211A、第一撑脚,211B、第二撑脚,211C、第三撑脚,221A、第一转向连杆,221B、第二转向连杆,222A、第一车轮,222B、第二车轮,223、变节距齿条连杆,2231、变节距齿条区,224、齿轮连杆,225、中空转向齿轮,2251、齿轮内卡槽,226、转向杆,2变节距齿条区27、万向节,228、方向盘,229A、第五铰链关节,229B、第六铰链关节,229C、第七铰链关节,229D、第八铰链关节,229E、第九铰链关节,229F、第十铰链关节,23、固定杆,300、绳驱动连续体机器人模型,30、机器人构成单元,311、机器人支撑件,3111、第一通过孔,3112、第二通过孔,3113、弯折通槽,312、机器人支撑脚,321、弹簧,322、支撑连接件,33、伸缩牵引绳,34、转向牵引绳,400、水面清洁折叠环保船模型,411、第三支撑件,412、第四支撑件,4121、贴覆面,4122、第一折叠面,4123、第二折叠面,4124、第三折叠面,413、船身,421、船桨轴,422A、第一船桨,422B、第二船桨,43、驱动绳,44A、第一固定架,44B、第二固定架,45、水草传输板。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,以下实施例结合附图对本发明的基于折纸工艺与增材制造技术结合的新型立体书作具体阐述,需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。
如图1-2所示,本实施例中的基于折纸工艺与增材制造技术结合的新型立体书1000,包括封面A1、封底A2、磁体A3、磁扣带A4、垫高件A5、多个活动书页A6以及多个立体模型。
封面A1和封底A2安装在多个活动书页A6的外部并且相对设置,
磁体A3安装在封面A1上,磁扣带A4的一端安装在封底A2上,另一端具有与磁体A3极性相反的磁场,能够吸合在磁体A3上,从而将使基于折纸工艺与增材制造技术结合的新型立体书1000保持合拢状态。
垫高件A5择一地设置在封面A1和封底A2的表面且朝向基于折纸工艺与增材制造技术结合的新型立体书1000内部设置,在本实施例中,垫高件A5的数量为2个,粘接在封底A2的边缘。
立体模型包括平面曲线缩放仪机构模型100、变节距齿轮汽车转向机构模型200、绳驱动连续体机器人模型300以及水面清洁折叠环保船模型400。包含支撑件、功能辅助件以及其它辅助件三种类型构件。
支撑件为纸件或增材制造件,设置在活动书页A6的表面上,用于通过折叠相对于活动书页A6进行运动。在本实施例中,支撑件粘接安装在活动书页A6的表面上,用于在基于折纸工艺与增材制造技术结合的新型立体书1000合拢时使得立体模型折叠在活动书页A6的表面上。
功能辅助件的材料为柔性材料通过增材制造技术制成,在受到外部压力时,体积能够被压缩,功能辅助件为通过增材制造技术得到,设置在支撑件上,相对于所述支撑件进行运动。
功能辅助件选自联动杆、铰链关节、方向盘228、两个万向节227、转向杆226、齿轮连杆224、中空转向齿轮225、变节距齿条连杆223、转向连杆、车轮、弹簧321、支撑连接件322、船桨轴421、船桨中的一种或多种,功能辅助件用于相对于支撑件进行运动,从而能够动态的展示立体模型的多个零部件的运动传动关系,在本实施例中,柔性材料为弹性树脂或者聚乳酸,优选为聚乳酸。
其它辅助件为立体模型中除支撑件和功能辅助件以外的其他部件。
如图3所示,当立体模型为平面曲线缩放仪机构模型100时:
功能辅助件包含联动杆和铰链关节。
联动杆包含第一联动杆121A、第二联动杆121B以及第三联动杆121C,在本实施例中,第一联动杆121A的第二联动杆121B的长度相同。
铰链关节包含第一铰链关节122A、第二铰链关节122B、第三铰链关节122C以及第四铰链关节122D,,在本实施例中,铰链关节均为如图4所示的结构,且该结构为至少两个实体部分可拆卸地安装为一体。
支撑件粘接在活动页面A6的表面上,包含第一支撑件111,在本实施例中,第一支撑件111与第三联动杆121C的长度相同,等于第一联动杆121A(第二联动杆121B)的长度的2倍。
第一支撑件111的一端与第三联动杆121C的一端通过第一铰链关节122A连接,在本实施例中,第一铰链关节122A的具体设置方式为:先将第一支撑件111的一端连同所在活动页面A6设置一通孔,接着再在第三联动杆121C的一端设置一与第一支撑件111的通孔相同的通孔,再由第一铰链关节122A通过两个通孔完成第一支撑件111与第三联动杆121C的铰接,在后描述的铰接方式均参照这种方式设置。
第一联动杆121A的一端和第二联动杆121B的一端分别通过第二铰链关节122B和第三铰链关节122C对应连接在第一支撑件111和第三联动杆121C上,在本实施例中,第一联动杆121A和第二联动杆121B的长度相同,等于第一支撑件111(第三联动杆121C)的长度的一半,且第二铰链关节122B和第三铰链节122C分别位于第一支撑件111的中间和第三联动杆121C的中间。
第一联动杆121A的另一端和第二联动杆121B的另一端通过第四铰链关节122D连接。
在本实施例中,当基于折纸工艺与增材制造技术结合的新型立体书1000合拢时,第一联动杆121A、第二联动杆121B以及第三联动杆121C均收拢在活动书页A6内且与第一支撑件111重合,当基于折纸工艺与增材制造技术结合的新型立体书1000展开时,第一联动杆121A、第二联动杆121B以及第三联动杆121C展开,此时,教师拨动第三联动杆121C的另一端进行移动,第一联动杆121A和第二联动杆121B的铰接点也随之移动,且第三联动杆121C的另一端的端点移动的距离始终等于第一联动杆121A和第二联动杆121B的铰接点移动距离的两倍,从而进行示教。
平面曲线缩放仪机构模型100由柔性材料通过增材制造技术制成的杆件和铰链关节装配而成,使得平面曲线缩放仪机构模型100运动灵活平稳,且尺度轻薄。
可以对用于对位移进行放大的平行四边形连杆构成平面曲线缩放仪机构进行生动的示教。
如图5-6所示,当立体模型为变节距齿轮汽车转向机构模型200时:
功能辅助件包含方向盘228、两个万向节227、转向杆226、齿轮连杆224、中空转向齿轮225、变节距齿条连杆223、转向连杆、车轮以及铰链关节。
转向连杆包含第一转向连杆221A和第二转向连杆221B,第一转向连杆221A和第二转向连杆221B均为具有一处弯折的杆。
车轮包含第一车轮222A和第二车轮222B。
铰链关节包含第五铰链关节229A、第六铰链关节229B、第七铰链关节229C、第八铰链关节229D、第九铰链关节229E以及第十铰链关节229F。
支撑件粘接活动页面A6的表面上,包含第二支撑件。
第二支撑件具有第一撑脚211A、第二撑脚211B以及第三撑脚211C,第一撑脚211A、第二撑脚211B以及第三撑脚211C均设置有折痕,能够使得第二支撑件折叠贴覆在活动页面A6的表面上,在本实施例中,第一撑脚211和第二撑脚211B均粘接在同一个活动页面A6的表面上,第三撑脚211C粘接在相邻的活动页面A6的表面上,第三撑脚211C能随立体书1000的展开而通过第二支撑件将变节距齿轮汽车转向机构模型200整体拉起。
其它辅助件为固定杆23,粘接在第二支撑件上。
第一转向连杆221A的一端和第二转向连杆221B的一端通过第九铰链关节229E和第十铰链关节229F均分别与变节距齿条连杆223的两端铰接,第一转向连杆221A的弯折处和所述第二转向连杆221B的弯折处通过第五铰链节229A和第六铰链关节229B均分别与固定杆23的两端铰接,从而使得第一转向连杆221A的一段、第二转向连杆221B的一段、变节距齿条连杆223以及固定杆23形成了一个等腰梯形连杆机构。
第一车轮222A和第二车轮222B均分别通过第七铰链关节229C和第八铰链关节229D对应铰接在第一转向连杆221A的另一端和第二转向连杆221B的另一端,在本实施例中,第一车轮222A整体和第二车轮222B整体能够分别绕第七铰链关节229C和第八铰链关节229D在竖直面进行转动,从而使得第一车轮222A整体和第二车轮222B整体折叠贴覆在第一转向连杆221A的另一端和第二转向连杆221B的另一端的表面上。
变节距齿条连杆223与固定杆23平行设置,具有变节距齿条区2231,变节距齿条区2231内非均匀分布着多个齿,变节距齿条连杆223的两端分别通过第九铰链关节229E和第十铰链关节229F对应连接在第一转向连杆221A的一端和第二转向连杆221B的一端,在本实施例中,变节距齿条区2231的中间齿距大于两端的齿距,当变节距齿条连杆223沿自身长度方向移动时,将驱动第一转向连杆221A的和第二转向连杆221B分别绕各自的拐点进行转动,从而使得第一车轮222A整体和第二车轮222B整体同步进行同幅的摆动。
中空转向齿轮225与变节距齿条连杆223的变节距齿条区2231啮合连接,中空转向齿轮225具有可压缩通孔,该可压缩通孔具有齿轮内卡槽2251,该齿轮内卡槽2251为柔性铰链,用于在中空转向齿轮225受压时进行收缩,如图7所示,在本实施例中,中空转向齿轮225为圆弧斜齿轮,中空转向齿轮225上具有深度方向沿厚度方向设置的可压缩通孔,该可压缩通孔的横截面为非矩形的平行四边形,可压缩通孔具有4个齿轮内卡槽2251,4个齿轮内卡槽2251为通槽形式的柔性铰链,分别位于可压缩通孔的四个角点,并均与可压缩通孔形成一体。齿轮连杆224设置在二支撑件上,齿轮连杆224的一端与所述中空转向齿轮225的一个端面固定连接。
两个方向节227用于实现变角度动力传递,方向盘228通过两个万向节227、转向杆226连接在齿轮连杆224的另一端,当在方向盘228上施加预定转矩时,两个万向节227将预定转矩传递至转向杆226上,从而驱动齿轮连杆绕自身轴线进行转动,进而够对变节距齿轮汽车转向机构进行更生动地示教。
在本实施例中,当基于折纸工艺与增材制造技术结合的新型立体书1000合拢时,第二支撑件通过第一撑脚211A、第二撑脚211B以及第三撑脚211C折叠在活动页面A6的表面上,方向盘228、两个万向节227、转向杆226、齿轮连杆224、中空转向齿轮225、变节距齿条连杆223、转向连杆以及车轮(已经转动并贴覆在转向连杆的表面)受力而被压缩,特别是由于齿轮内卡槽2251的应用使得中空转向齿轮225能够被压缩的更薄,当基于折纸工艺与增材制造技术结合的新型立体书1000展开时,变节距齿轮汽车转向机构模型200整体被拉起,此时,教师转动方向盘228从而使得第一车轮222A整体和第二车轮222B整体同步进行同幅的摆动,从而进行示教。
变节距齿轮汽车转向机构模型200通过柔性材料制作的功能辅助件配合纸制支撑件的折纸工艺处理,使得变节距齿轮汽车转向机构200能随活动页面A6的翻折而运动,尤其增材制造而成的柔性圆弧斜齿轮等辅助功能件可被压缩折叠,使变节距齿轮汽车转向机构模型200受压时大大降低整体厚度,减小所占空间。
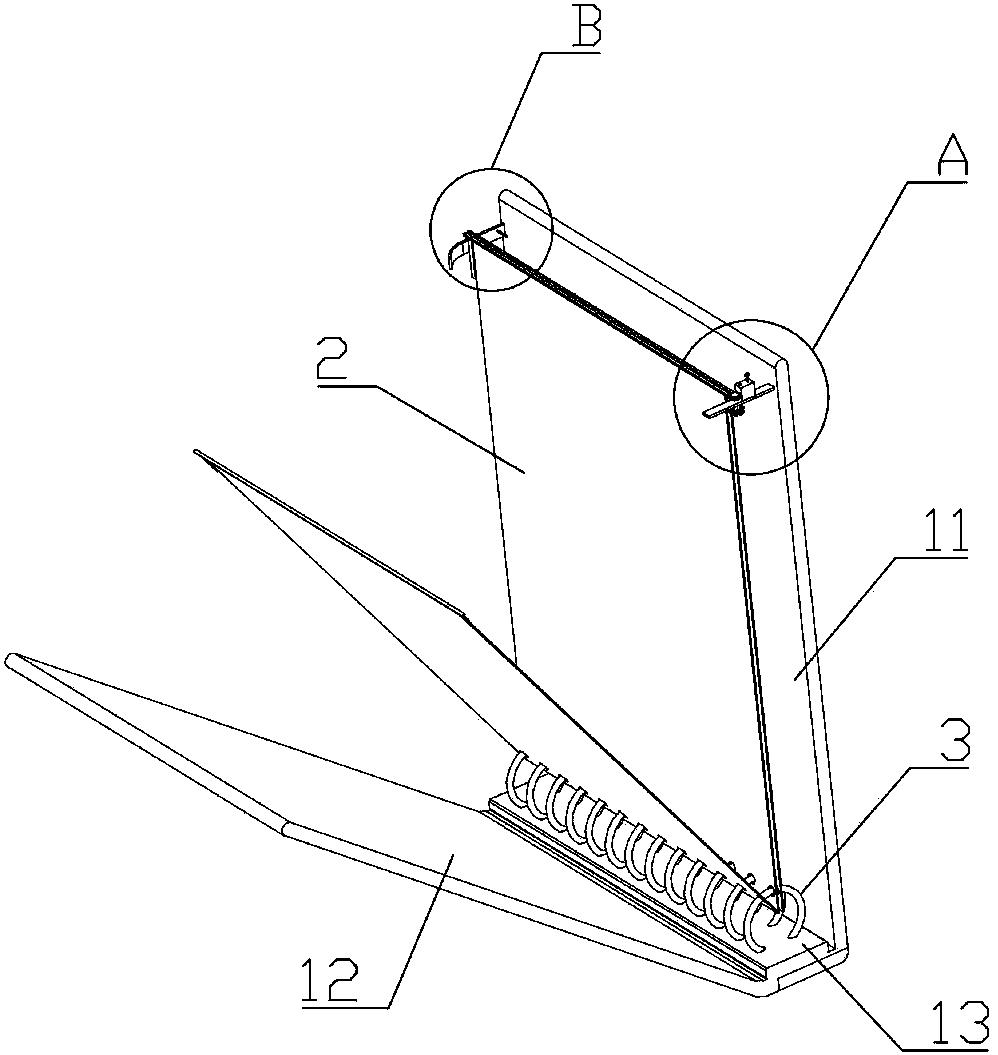
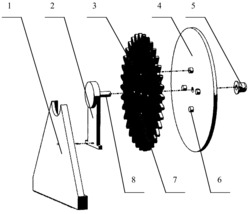
如图8、图11所示,当立体模型为绳驱动连续体机器人模型300时:
功能辅助件包含多个且相互平行的机器人支撑件311、多个相同的弹簧321和多个相同的支撑连接件322,在本实施例中,平行的机器人支撑件311的数量为10个,弹簧321的数量为5个,支撑连接件322的数量为4个。
支撑件粘接在活动页面A6的表面上,包含一个机器人支撑脚312。
如图9-10所示,机器人支撑件311呈圆形,并且所有机器人支撑件的轴线均相同具有一个第一通过孔3111、三个第二通过孔3112以及两条弯折通槽3113,构成柔性铰链,该弯折通槽3113的长度方向与活动页面A6平行。
在本实施例中,第一通过孔3111位于机器人支撑件311的中心。
在本实施例中,三个第二通过孔3112以机器人支撑件311的中心为中心环形且均匀设置,且不位于弯折通槽3113中。
在本实施例中,沿两条弯折通槽3113弯折机器人支撑件311后,机器人支撑件311的两侧将分别贴覆在活动页面A6上和与活动页面A6平行。
机器人支撑脚312粘接在位于绳驱动连续体机器人模型300的端面的机器人支撑件311的表面上,在本实施例中,机器人支撑脚312具有折痕,按折痕弯折后能够使得绳驱动连续体机器人模型300向活动页面A6表面贴合。
弹簧321设置在相邻的两个机器人支撑件311之间,并且所有弹簧321的轴线均相同,即所有弹簧321分布在同一轴线上。
支撑连接件322呈球状,设置在相邻的两个机器人支撑件311之间,所有支撑连接件322在弹簧321的轴线上均匀分布,并且分别设置在相邻的两个弹簧321之间,
10个且相互平行的机器人支撑件311和5个相同的弹簧321构成了5个相同的机器人构成单元30,每个机器人构成单元30的两端分别为一个机器人支撑件311,中间为弹簧321,弹簧321的两端分别抵接机器人支撑件311,每个支撑连接件322设置在相邻的两个机器人构成单元30之间,支撑连接件322的两端分别与机器人构成单元30抵接。
其它辅助件包含伸缩牵引绳33、转向牵引绳34、光源(附图中未标出)以及镜头(附图中未标出)。
伸缩牵引绳33沿弹簧321的轴线设置,穿过所有弹簧321、所有支撑连接件322以及9个机器人支撑件311的第一通过孔3111并安装在位于绳驱动连续体机器人模型300的一端的机器人支撑件311上,用于通过向预定方向拉动使得弹簧321压缩,从而拉动伸缩牵引绳33将使得绳驱动连续体机器人模型300收缩,松开伸缩牵引绳33,弹簧321的回复力将使得绳驱动连续体机器人模型300回复原状,伸缩牵引绳33和转向牵引绳34的拉动方向与弯折通槽3113的槽口朝向相反。
所有机器人支撑件311均安装在转向牵引绳34上,并且转向牵引绳34的数量为3条,围绕机器人支撑件311的轴线均匀分布。在本实施例中,每条转向牵引绳34通过9个机器人支撑件311上对应的第二通过孔3112并固定连接在每个机器人支撑件311上,从而拉动任意一条转向牵引绳34将使得绳驱动连续体机器人模型300朝向该条转向牵引绳34的方向转向,松开转向牵引绳34,弹簧321的回复力将使得绳驱动连续体机器人模型300回复原状,而且在拉动伸缩牵引绳33或者转向牵引绳34时,因为机器人支撑件311的弯折通槽3113的槽口朝向与拉动方向相反,因此机器人支撑件311不会进行任何折叠。
光源和镜头设置在端部的机器人支撑件的表面上,用于模拟提供在封闭区域中的照明,从而能够模拟应用于活体内部手术操作的绳驱动连续体机器人端部的用于封闭区域的照明的照明装置,从而能够对绳驱动连续体机器人进行更生动地进行示教。
在本实施例中,当基于折纸工艺与增材制造技术结合的新型立体书1000合拢时,弯折通槽3113用于使机器人支撑件311沿弯折通槽3113压缩在活动页面A6上,从而使得绳驱动连续体机器人模型300被收缩,当基于折纸工艺与增材制造技术结合的新型立体书1000展开时,恢复连续体机器人模型300的外形,此时,教师通过拉动伸缩牵引绳33或转向牵引绳34使连续体机器人模型300伸缩或转向,进行示教。
绳驱动连续体机器人模型300由通过柔性材料制作的功能辅助件配合纸制支撑件的折纸工艺处理以及绳驱动等结合制作而成,绳驱动连续体机器人模型300可形象模拟出真实绳驱动连续体机器人的运动情况,而且绳驱动连续体机器人模型300可被压缩折叠,使绳驱动连续体机器人模型300体积大大缩小。
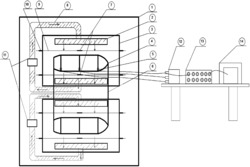
如图12所示,当立体模型为水面清洁折叠环保船模型400时:
功能辅助件包含船桨轴421、船桨和水草传送板45。
船桨包含由柔性材料制作的第一船桨422A和第二船桨422B。
支撑件包括第三支撑件411、第四支撑件412以及船身413。
第三支撑件411和第四支撑件412分别对应粘接在两个相邻的活动页面A6的表面上,并且第三支撑件411的一端和第四支撑件412的一端均与船身413粘接,在本实施例中,第三支撑件411上具有预设的折痕,第四支撑件412按照三浦折叠的方式预设有相应的折痕,从而使得第三支撑件411和第四支撑件412能够折叠在活动页面A6上,如图13所示,第四支撑件412具有贴覆面4121和三个折叠面,三个折叠面分别为第一折叠面4122、第二折叠面4123、以及第三折叠面4124,贴覆面4121粘接在活动页面A6,三个折纸转动副相交于一点,可沿任意方向转动,提供转动适应性,即第一折叠面4122、第二折叠面4123、以及第三折叠面4124转动副相交于一点,能够使得船身413能够随着立体书1000的合拢而对折,从而使折叠后的模型体积变得更薄。
其它辅助件包含第一固定架44A、第二固定架44B以及驱动绳43。
第一固定架44A的一端和第二固定架44B的一端均与船身413粘接,第一固定架44A的另一端和第二固定架44B的另一端均套设在船桨轴421上,船桨轴421能够相对与第一固定架44A和第二固定架44B进行转动。
第一船桨422A和第二船桨422B分别设置在船桨轴421的两端。
在本实施例中,驱动绳43部分缠绕在船桨轴421上,驱动绳43的一端安装在活动页面A6的表面,另一端固定在船桨轴421上,当立体书1000展开到预定的角度时,活动书页A6的一端将牵动驱动绳43,从而驱动船桨轴421进行转动。
水草传输板45的数量为2个,由柔性材料增材制成,包含分别铰接在船身413的两端的第一水草传送板和第二水草传送板,第一水草传送板和第二水草传送板能够朝向船身413折叠,并且第一水草传送板和第二水草传送板的表面均具有可移动的履带,从而能够对水面清洁折叠环保船进行更生动地进行示教。
在本实施例中,当基于折纸工艺与增材制造技术结合的新型立体书1000合拢时,第三支撑件411、第四支撑件412以及船身413使得立体模型为水面清洁折叠环保船模型400折叠在活动页面A6的表面(水草传输板45已折叠在船身413上),当基于折纸工艺与增材制造技术结合的新型立体书1000展开时,水面清洁折叠环保船模型400展开,当立体书1000展开到一定角度时,驱动绳43带动船桨轴421转动,从而使的第一船桨422A和第二船桨422转动,教师以此进行示教。输送板柔性材料,履带传动运输,翻折缩小空间,压缩可变薄。
水面清洁折叠环保船400由通过柔性材料制作的功能辅助件配合纸制支撑件的折纸工艺处理以及绳驱动等结合制作而成,增材制造技术而成的功能辅助件可在绳驱动或手动驱动下实现转动或折展,同时与支撑件的折纸工艺处理相配合,使得水面清洁折叠环保船400的展示更加生动形象,同时还能提高环保意识。
上述立体模型相对于活动页面A6均具有可折叠、可压缩、自回复的特点,而且立体模型的构成组件也可回收,从而使得该构成组件也可多次使用。
基于折纸工艺与增材制造技术结合的新型立体书1000在教学示教中的应用,通过翻开基于折纸工艺与增材制造技术结合的新型立体书1000,展开立体模型,从而进行教学示教,立体模型用于呈现机械工程学科经典机构和现代机构案例,包含平面曲线缩放仪机构模型100,变节距齿轮汽车转向机构模型200、绳驱动连续体机器人模型300、水面清洁折叠环保船模型400。
上述实施方式为本发明的优选案例,并不用来限制本发明的保护范围,本领域普通技术人员在所附权利要求范围内不需要创造性劳动就能做出的各种变形或修改仍属本专利的保护范围,例如,本实施例通过能够相互吸合在一起的磁扣带和磁体使基于折纸工艺与增材制造技术结合的新型立体书保持合拢状态,但在实际应用中,也可通过可扣接在一起的子母扣或者魔术贴等使立体书保持合拢状态。
一种基于折纸工艺与增材制造技术结合的新型立体书专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0