









专利摘要
本发明公开了一种基于串联式双路液压功率流耦合的车辆驱动系统,包括:电池组,其设置在车辆后部;可逆式电机,其连接电池组;恒压变量泵,其由可逆式电机驱动;第一变量液压马达,其进油口与恒压变量泵出油口连通,出油口与恒压变量泵进油口连通;第二变量液压马达,其与第一变量液压马达并联;其中,在第二变量液压马达与恒压变量泵之间设置有液压蓄能器;机械传动模块,其动力输入端连接第一变量液压马达及第二变量液压马达,动力输出端连接两个前轮;电池管理系统,其连接电池组及可逆式电机;控制器,其电联恒压变量泵、第一变量液压马达、第二变量液压马达及电池管理系统。本发明还公开了基于串联式双路液压功率流耦合的车辆驱动系统的控制方法。
权利要求
1.一种基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,其特征在于,使用的基于串联式双路液压功率流耦合的车辆驱动系统,包括:
电池组,其设置在车辆的后部;
可逆式电机,其连接所述电池组;
恒压变量泵,其连接所述可逆式电机;
第一变量液压马达,其进油口与所述恒压变量泵的出油口连通,出油口与所述恒压变量泵进油口连通;
第二变量液压马达,其与所述第一变量液压马达并联;
其中,在所述第二变量液压马达与所述恒压变量泵之间的液压管路上设置有液压蓄能器;
机械传动模块,其动力输入端连接所述第一变量液压马达及所述第二变量液压马达,动力输出端连接两个前轮;
电池管理系统,其连接所述电池组及所述可逆式电机;
控制器,其电联所述恒压变量泵、所述第一变量液压马达、所述第二变量液压马达及电池管理系统;
超级电容器,其连接所述电池组;
所述机械传动模块包括汇流行星排、减速器和差速器;
其中,所述汇流行星排由齿圈、太阳轮和行星轮构成,所述第一变量液压马达与所述太阳轮连接,所述第二变量液压马达与所述齿圈连接;所述减速器的动力输入端与所述行星轮固定连接,动力输出端与所述差速器连接,并且通过所述差速器将动力分配给两个前轮;
根据车辆的运动状态及液压蓄能器的状态,确定基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,包括当20%<SMC<γ时,
如果P0>P1>0时,由可逆式电机驱动,并且向液压蓄能器充能;
如果P0=P1时,由可逆式电机驱动,液压蓄能器停止工作;
如果0<P0<P1时,可逆式电机和液压蓄能器共同驱动;
如果P1=0时,可逆式电机向液压蓄能器充能;
如果P1<0时,第二变量液压马达转换为液压泵模式向液压蓄能器充能,并且超级电容器回收制动能量;
其中,SMC为液压蓄能器储能状态,P0为可逆式电机的输出功率,P1为驱动车轮所需要的负载功率;γ表示液压蓄能器的正常可工作储能水平和储能上限的临界值;
其中,γ
2.根据权利要求1所述的基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,其特征在于,还包括当SMC≥γ时,
如果P0>P1>0,可逆式电机停止工作,由液压蓄能器驱动;
如果P0=P1,由可逆式电机驱动,液压蓄能器停止工作;
如果0<P0<P1,由可逆式电机和液压蓄能器共同驱动;
如果P1=0,可逆式电机停止工作,车辆所需能量完全由液压蓄能器提供;
如果P1<0,超级电容器回收能量。
3.根据权利要求2所述的基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,其特征在于,当SMC≤20%,可逆式电机向液压蓄能器充能,并且停止驱动液压马达。
4.根据权利要求1或2所述的基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,其特征在于,所述可逆式电机驱动的驱动方式为:
所述可逆式电机通过恒压变量泵将能量传输到第一变量液压马达,所述第一变量液压马达将能量传输到机械传动模块,驱动车辆前轮;
所述液压蓄能器的驱动方式为:
所述液压蓄能器通过第二变量液压马达将能量传输到所述机械传动模块,驱动车辆前轮。
5.根据权利要求4所述的基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,其特征在于,γ=80%。
6.根据权利要求5所述的基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,其特征在于,所述第一变量液压马达和第二变量液压马达均采用斜盘式轴向变量马达。
说明书
技术领域
本发明属于混合动力汽车驱动系统技术领域,特别涉及一种基于串联式双路液压功率流耦合的车辆驱动系统及其控制方法。
背景技术
面对日益紧张的能源和环保压力,各国政府先后出台大量政策措施,鼓励新能源车辆的发展。目前占据市场潮流的主要是纯电动车辆及油电混合动力车辆。但是,纯电动汽车在电池等关键技术没有取得重大突破之前,其续航里程、电池寿命以及成本等因素依然会严重限制其发展,而电池等关键技术的突破又绝非一朝一夕的事情,如何提高蓄电池的能量密度、延长使用寿命、降低使用成本等问题将会长期困扰电动汽车的发展。作为过渡时期使用的油电混合动力车辆,于现有技术条件的限制和节能环保之间找到了较好的平衡点,以丰田普锐斯系列为代表,展现了其强大的性能及良好的节能效果。但是其本质上依然没有摆脱以燃烧化石燃料作为动力源的发动机,在节能与环保效果上依然不尽如人意。纯电动汽车和油电混合动力车辆一般都有制动能量回收的功能,再生制动能量的回收和再利用有利于节能以及延长行驶里程,但是在短时间内的制动过程中,受制于能量的转换形式,所回收的制动能量极其有限,且控制复杂,更重要的是频繁地对电池充放电,增加了对电池和可逆式电机的负荷和冲击,很容易降低电池的使用寿命。
在行走机械和特种车辆上广泛应用着一种串联式油液混合动力系统,它也是一种广义上的混合动力,只是由油电混合变为了油液混合,其相比于纯电动车辆,可以大幅度提高续驶里程,并大幅度降低对动力源的要求,减少成本;而相比于油电混合动力车辆,在具有超过油电混合动力车辆动力性能的前提下,节能效果更好。但其存在液压系统容易泄漏、功率损耗大、冲击振动大,以及动力源和负载之间无法完全解耦等缺点,在公路车辆上(如乘用车、商用车等)应用稀少。
发明内容
本发明的目的之一是提供一种基于串联式双路液压功率流耦合的车辆驱动系统,其采用电动机作为动力源,将可逆式电机与机械传动模块之间通过液压系统连接,可逆式电机只通过恒压变量泵将机械能转化为液压能,为整个液压系统提供稳定的恒压油源,从而实现了可逆式电机与驱动轮之间完全的解耦,使可逆式电机始终保持在高效区工作,保证了能量的高效利用。
本发明的目的之二是提供一种基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,其能够根据车辆的运动状态及液压蓄能器的储能状态控制车辆驱动系统的供能方式,并且保证在各种供能方式之间及时、准确的做出切换,以确保车辆动力性和经济性两者之间的协调。
本发明提供的技术方案为:
一种基于串联式双路液压功率流耦合的车辆驱动系统及其控制方法,包括:
电池组,其设置在车辆的后部;
可逆式电机,其连接所述电池组;
恒压变量泵,其连接所述可逆式电机;
第一变量液压马达,其进油口与所述恒压变量泵的出油口连通,出油口与所述恒压变量泵进油口连通;
第二变量液压马达,其与所述第一变量液压马达并联;
其中,在所述第二变量液压马达与所述恒压变量泵之间的液压管路上设置有液压蓄能器;
机械传动模块,其动力输入端连接所述第一变量液压马达及所述第二变量液压马达,动力输出端连接两个前轮;
电池管理系统,其连接所述电池组及所述可逆式电机;
控制器,其电联所述恒压变量泵、所述第一变量液压马达、所述第二变量液压马达及电池管理系统。
优选的是,所述机械传动模块包括汇流行星排、减速器和差速器;
其中,所述汇流行星排由齿圈、太阳轮和行星轮构成,所述第一变量液压马达与所述太阳轮连接,所述第二变量液压马达与所述齿圈连接;所述减速器的动力输入端与所述行星轮固定连接,动力输出端与所述差速器连接,并且通过所述差速器将动力分配给两个前轮。
优选的是,所述第一变量液压马达和第二变量液压马达均采用斜盘式轴向变量马达。
优选的是,所述基于串联式双路液压功率流耦合的车辆驱动系统还包括:
超级电容器,其连接所述电池组。
一种基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,采用所述的基于串联式双路液压功率流耦合的车辆驱动系统,根据车辆的运动状态及液压蓄能器的状态,确定基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,包括当20%<SMC<γ时,
如果P0>P1>0时,由可逆式电机驱动,并且向液压蓄能器充能;
如果P0=P1时,由可逆式电机驱动,液压蓄能器停止工作;
如果0<P0<P1时,可逆式电机和液压蓄能器共同驱动;
如果P1=0时,可逆式电机向液压蓄能器充能;
如果P1<0时,第二变量液压马达转换为液压泵模式向液压蓄能器充能,并且超级电容器回收制动能量;
其中,SMC为液压蓄能器储能状态,P0为可逆式电机的输出功率,P1为驱动车轮所需要的负载功率。
优选的是,所述基于串联式双路液压功率流耦合的车辆驱动系统的控制方法还包括当SMC≥γ时,
如果P0>P1>0,可逆式电机停止工作,由液压蓄能器驱动;
如果P0=P1,由可逆式电机驱动,液压蓄能器停止工作;
如果0<P0<P1,由可逆式电机和液压蓄能器共同驱动;
如果P1=0,可逆式电机停止工作,车辆所需能量完全由液压蓄能器提供;
如果P1<0,超级电容器回收能量。
优选的是,当SMC≤20%,可逆式电机向液压蓄能器充能,并且停止驱动液压马达。
优选的是,所述可逆式电机驱动的驱动方式为:
所述可逆式电机通过恒压变量泵将能量传输到第一变量液压马达,所述第一变量液压马达将能量传输到机械传动模块,驱动车辆前轮;
所述液压蓄能器的驱动方式为:
所述液压蓄能器通过第二变量液压马达将能量传输到所述机械传动模块,驱动车辆前轮。
优选的是,γ=80%。
优选的是,
其中,γ0为设定的标准值,γ0=75%~80%;m为汽车的质量,m0为设定的标准汽车质量;v为汽车的车速,v0为设定的标准车速;T为环境温度,T0为设定的标准环境温度;RH为环境温相对湿度,RH0为设定的标准环境相对湿度。
本发明的有益效果是:
本发明提供的基于串联式双路液压功率流耦合的车辆驱动系统,采用电池组作为动力源,将可逆式电机与机械传动模块之间通过液压系统连接,可逆式电机只通过恒压变量泵将机械能转化为液压能,为整个液压系统提供稳定的恒压油源,从而实现了可逆式电机与驱动轮之间完全的解耦,使可逆式电机始终保持在高效区工作,保证了能量的高效利用。
本发明提供的基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,能够根据车辆的运动状态及液压蓄能器的储能状态控制车辆驱动系统的供能方式,并且保证在各种供能方式之间及时、准确的做出切换,以确保车辆动力性和经济性两者之间的协调。
附图说明
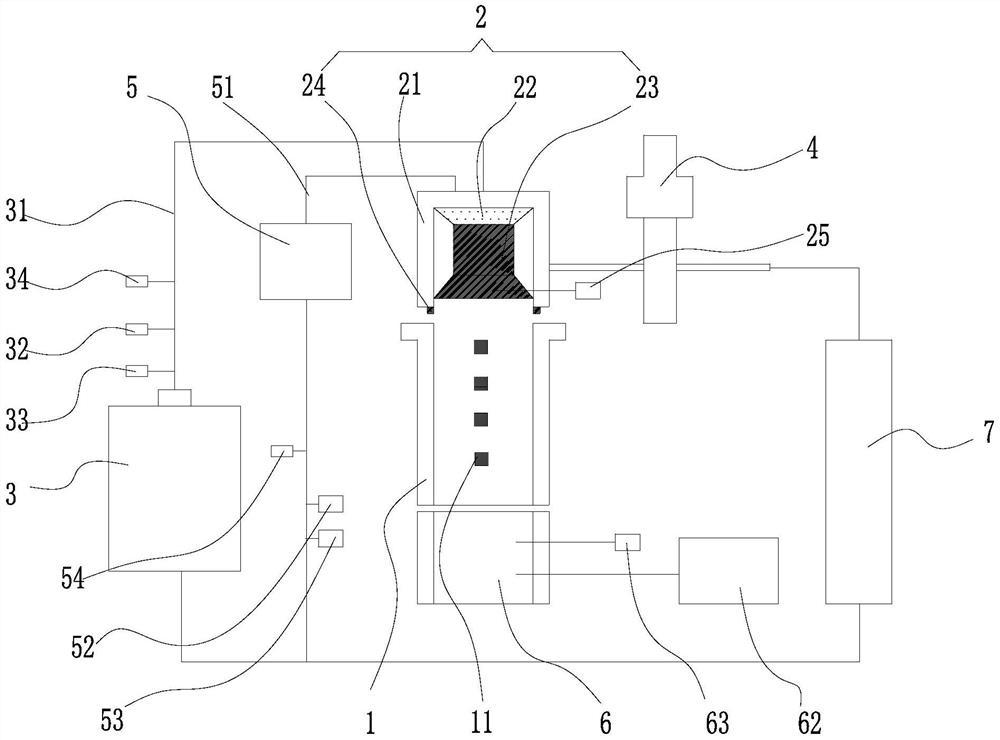
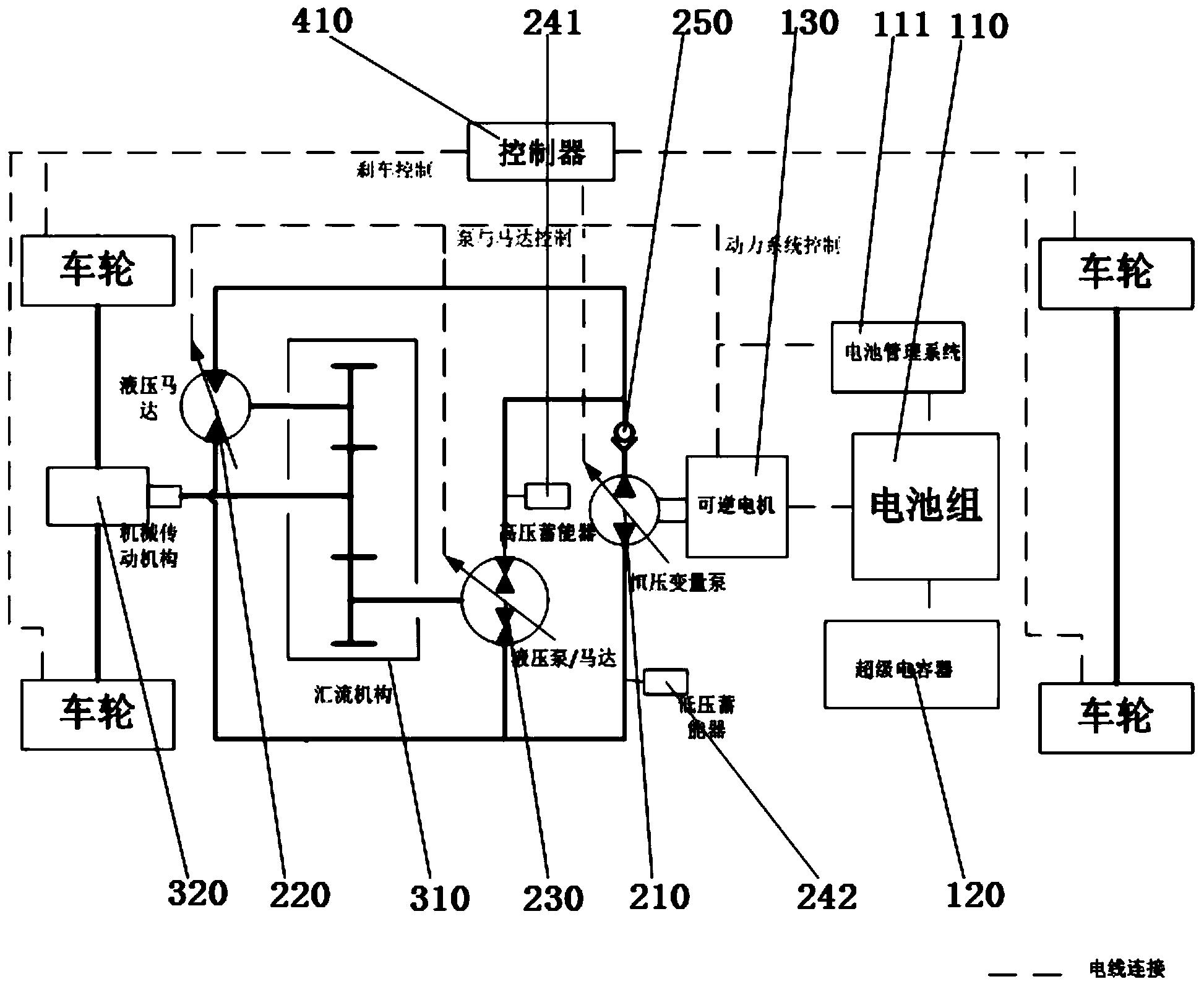
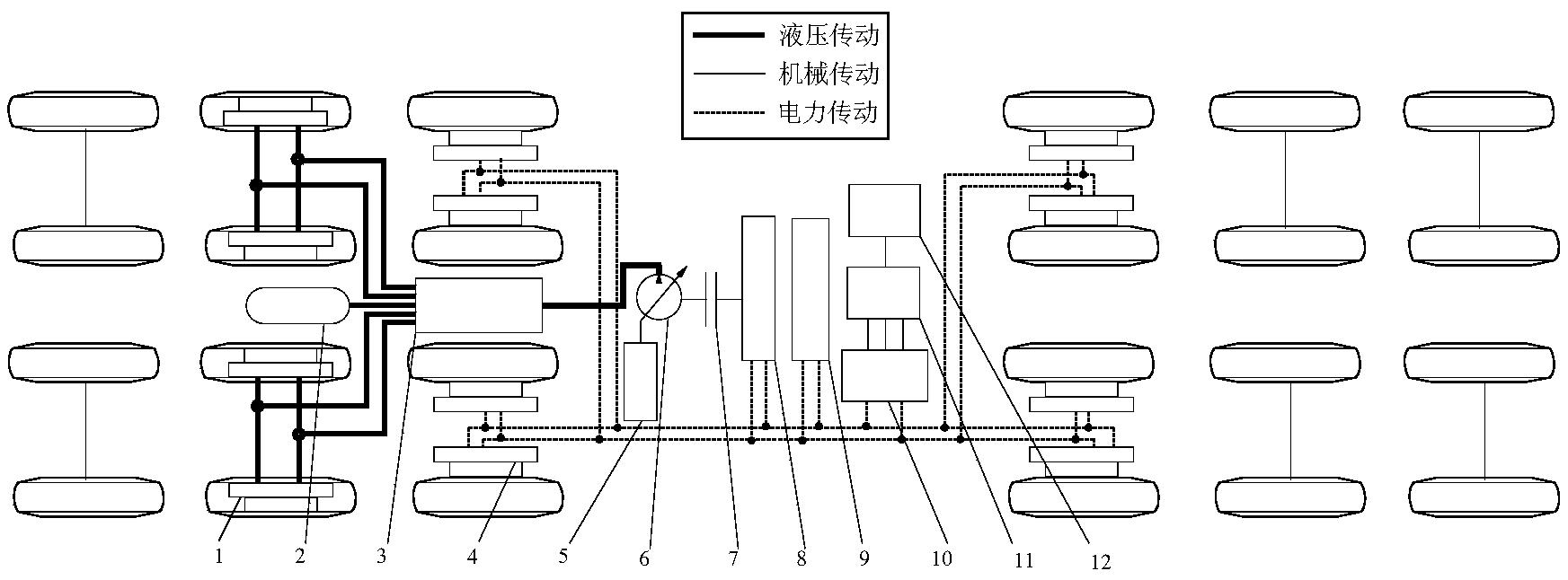
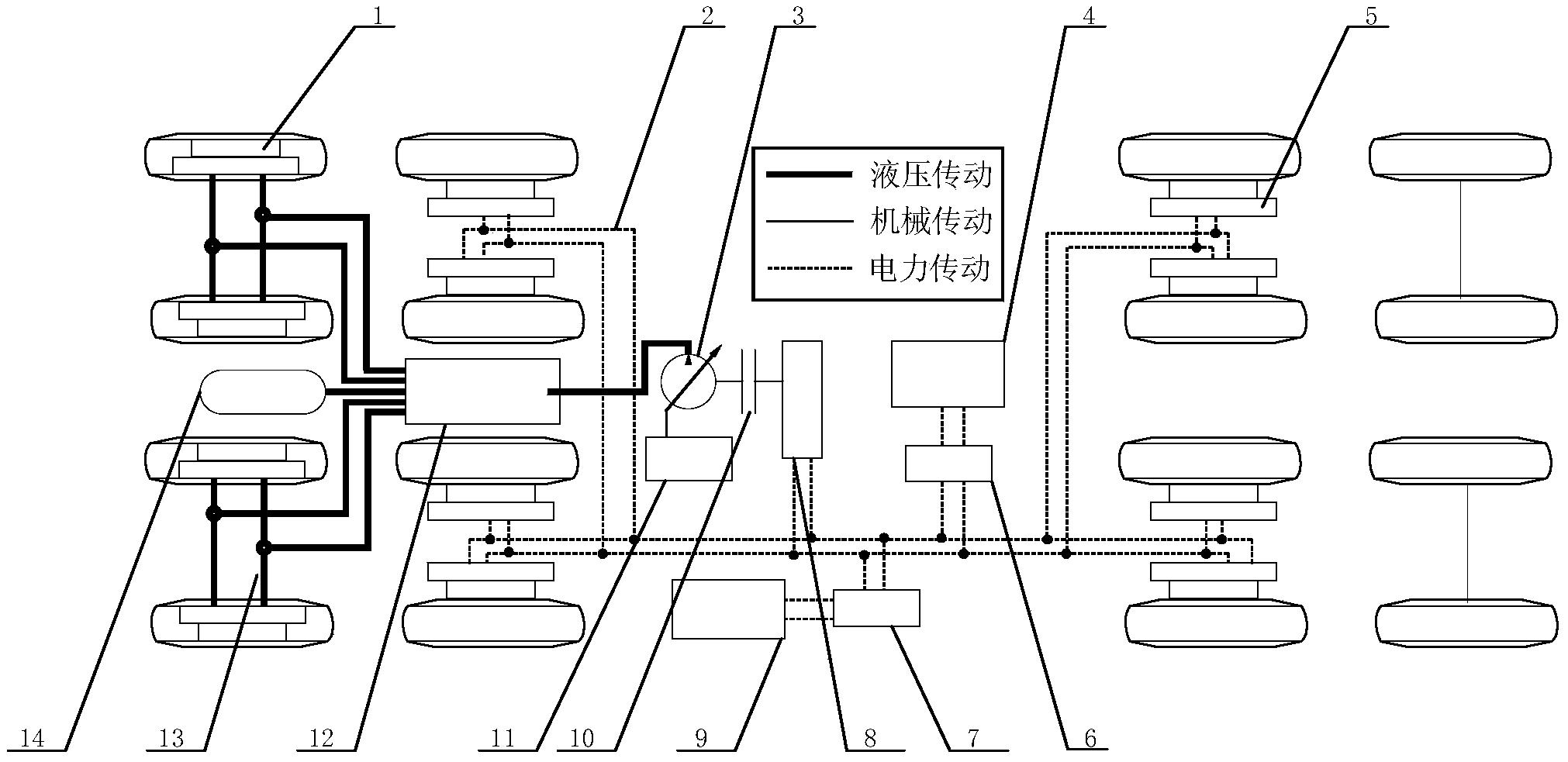
图1为本发明所述的基于串联式双路液压功率流耦合的车辆驱动系统示意图。
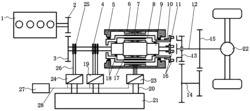
图2为本发明所述的SMC≤20%时的能量流传输路线示意图。
图3为本发明所述的由可逆式电机单独驱动并且液压蓄能器储能时的能量流传输路线示意图。
图4为本发明所述的可逆式电机和液压蓄能器共同驱动时的能量流传输路线示意图。
图5为本发明所述的由液压蓄能器单独驱动时的能量流传输路线示意图。
图6为本发明所述的20%<SMC<γ车辆制动时的能量流传输路线示意图。
具体实施方式
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
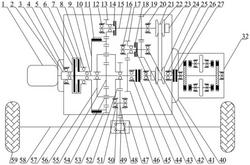
如图1所示,本发明提供了一种基于串联式双路液压功率流耦合的车辆驱动系统,其采用后置前驱形式,包括动力模块、液压传动模块、机械传动模块和控制模块。其中,动力模块包括电池组110、超级电容器120以及可逆式电机130;液压传动模块包括恒压变量泵210、第一变量液压马达220、第二变量液压马达230和液压蓄能器,其中,第二变量液压泵(液压泵/马达)230可以在泵和马达两种工况相互转换;机械传动模块包括汇流行星排310、主减速器和差速器组成的机械传动机构320;控制模块采用一个集成的整车控制器410,其接受传感器传来的信号,监测电池组110的运行情况以及能量的回收情况,并且对所述车辆驱动系统进行控制。
动力模块主要位于车辆后部,其产生的功率流经过布置在车辆中间位置的液压传动模块,传递到机械传动模块,之后,功率流经过机械传动模块中的汇流行星排310后传输到机械传动机构320(由差速器和主减速器组成),后再经机械传动机构320分配到两个前驱动轮;所有控制工作均由控制模块完成。
在本实施例中,汇流行星排由齿圈、太阳轮和行星轮构成,这三者都可以通过制动器和离合器控制,使之根据需求处于固定或自由状态。所述第一变量液压马达220与汇流行星排310的太阳轮连接,所述第二变量液压马达230与汇流行星排310的齿圈连接;所述减速器的动力输入端与所述汇流行星排的行星齿轮固定连接,输出端与所述差速器连接,并且通过所述差速器将动力分配给两个前轮。
电池组110安装在车辆后部,其连接电池管理系统111,并且由电池管理系统111进行检测与管理;同时电池组110与超级电容器120相连接,超级电容器120负责回收制动能量,给电池组110充电。电池组110连接可逆式电机130,为可逆式电机130提供能量;可逆式电机130连接恒压变量泵210,驱动恒压变量泵210工作。第一变量液压马达220的进油口与所述恒压变量泵210的出油口通过液压管路连通,第一变量液压马达220的出油口与所述恒压变量泵210的进油口通过液压管路连通;第二变量液压马达230与第一变量液压马达220并联。液压蓄能器设置在所述第二变量液压马达230与所述恒压变量泵210之间的液压管路上;其中,所述液压蓄能器包括高压蓄能器241和低压蓄能器242,高压蓄能器241靠近恒压变量泵210的出油口设置,低压蓄能器242靠近恒压变量泵210的进油口设置。此外,在恒压变量泵210的出油口处设有单向阀250,以防止油液倒流。
可逆式电机130通过恒压变量泵210为第一变量液压马达(液压马达)220和第二变量液压马达(液压泵/马达)230提供液压能,驱动第一变量液压马达220和第二变量液压马达230工作。
第一变量液压马达220和第二变量液压马达230依据控制策略,时而单独工作,时而一起工作,通过汇流行星排,将动力传给机械传动模块,进而驱动两个前驱动轮旋转。第二变量液压马达230在驱动工况下充当马达工作,而在车辆制动时充当泵工作,将制动能回收到液压蓄能器中。
在整个车辆驱动系统运行过程中,可逆式电机130始终持续稳定的工作在自己的高效区,并为液压系统提供持续稳定的恒压油源。
在本实施例中,恒压变量泵210采用斜盘式轴向变量泵。第一变量液压马达220和第二变量液压马达230均采用斜盘式轴向变量马达,在驱动车辆行驶过程中,可以通过不断改变斜盘式轴向变量马达(泵)的斜盘倾斜角,来满足负载要求,实现无级变速。
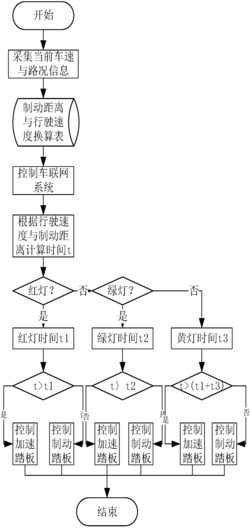
本发明还提供了一种基于串联式双路液压功率流耦合的车辆驱动系统的控制方法,具体控制策略如下:
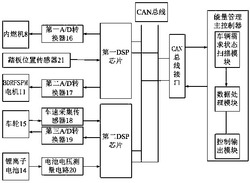
本发明的控制策略以整车控制器410为核心,整车控制器410接受加速踏板和制动踏板的信号,并综合电池管理系统、刹车系统等传来的信息,识别出前进、倒车、加速及制动等信号,并根据此时电池组、液压蓄能器、超级电容器的状态,确定车辆运行控制策略。
设可逆式电机的输出功率为P0,而驱动车轮所需要的负载功率为P1,液压蓄能器储能状态为SMC。负载功率有3种状态,P1>0,P1<0,P1=0,分别对应于行驶状态、制动状态、停车(或者怠速)状态。液压蓄能器的储能状态SMC也可分为3种,即SMC≤20%,20%<SMC<γ,SMC≥γ,分别对应液压蓄能器的储能下限、正常可工作储能水平和储能上限。
其中,液压蓄能器储能状态SMC的计算公式为:
E--液压蓄能器充满能量时的能量数值,单位为J,在设计整车时与其他部件匹配给出;E1--实时状态下液压蓄能器存储的能量数值,单位为J,其计算公式为:
P0--初始充气压力,单位为Pa;V0--初始状态下的容积,单位为m
在本发明的设计思路下,可逆式电机可以持续工作在经济性最好的某段狭窄区间之内,其输出功率的确定公式为:
η--传动系统总效率,包括泵效率、马达效率、机械传动模块效率;m--整车质量,单位为kg;g--重力加速度,单位为m/s
负载功率取决于车辆的运行状态,其计算公式为:
v--车辆实时行驶速度,单位为m/s;α--爬坡角度;δ--旋转质量换算系数;dv/dt--车辆加速度,单位为m/s
(1)当SMC≤20%,此时液压蓄能器无法供能,当遇到陡坡,泥泞道路等需要特大功率的路况时,液压蓄能器将无法辅助可逆式电机提供所需功率,所以此时控制器发出命令,停止向第一变量液压马达和第二液压变量马达(液压泵/马达)供能,即使车辆空转,然后控制可逆式电机全力向液压蓄能器充能,直到使SMC超过20%。由于向液压蓄能器充能不会很长时间,只需几秒钟,所以车辆短暂空转不会造成过大影响。该过程的能量流传输路线如图2所示。
(2)当20%<SMC<γ时
若P0>P1>0,车辆处于前行驶状态,此时负载所需功率小于可逆式电机输出功率,可逆式电机处于平稳运转阶段,控制器控制可逆式电机通过恒压变量泵输出稳定的高压油源给第一变量液压马达,并且控制将多余的能量将存储到液压蓄能器中;该过程的能量流传输路线如图3所示。
若P0=P1,此时负载所需功率等于可逆式电机输出功率,控制器发出命令,仅由可逆式电机通过恒压变量泵驱动第一变量液压马达,并通过第一变量液压马达将能量传输至汇流行星排,之后传输到机械传动机构;并且控制液压蓄能器停止工作,既不充能,也不放能;
若0<P0<P1,此时负载所需功率大于可逆式电机输出功率,则控制器将发出命令,由可逆式电机和液压蓄能器共同供能,第二变量液压马达转入马达工况与第一变量液压马达通过汇流行星排耦合共同向机械传动机构供能;该过程的能量流传输路线如图4所示。
若P1=0时,此时负载功率为0,控制器控制可逆式电机不再驱动负载,而是通过恒压变量泵为液压蓄能器充能;
若P1<0时,则车辆处于制动状态,此时控制器发出命令,进行能量回收,第二液压马达转为液压泵工况,为液压蓄能器充能,同时超级电容器也回收制动能量,为电池组充电。该过程能量传输路线如图6所示。
在上述过程中,若向液压蓄能器充能时大于γ,则控制器发出命令,停止向其充能;若出现SMC≤20%的情况时,则切换为SMC≤20%的控制策略。
(3)当SMC≥γ时
若P0>P1>0,此时控制器将控制可逆式电机停止运转,单独由液压蓄能器向第二液压马达供能,第二液压马达马达转换为马达工况,驱动机械传动模块。该过程能量流传输路线如图5所示。
若恰好P0=P1,为避免可逆式电机频繁启动停止,此时控制器发出命令,不再向液压蓄能器充能,并由可逆式电机通过第一变量液压马达单独驱动;
若P0<P1,此时负载所需功率大于可逆式电机输出功率,则控制器将控制液压蓄能器放能,可逆式电机和液压蓄能器共同驱动,第一变量液压马达与第二液压马达(马达工况)通过汇流行星排耦合输出功率进行驱动;该过程的能量流传输路线如图4所示。
若P1=0,此时为怠速状态,控制器控制可逆式电机停止运转,车辆所需能量完全由液压蓄能器提供。
若P1<0,则为制动状态,但控制器会进行控制,此时液压蓄能器不再吸收能量,能量全由超级电容器回收用于给锂电池组充电。
在上述过程中若出现蓄能器放能过多,出现SMC≤20%的情况,则控制器会使之自动切换模式。
在本实施例中,γ=80%。
在另一实施例中,根据经验确定液压蓄能器的正常可工作储能水平和储能上限的临界值γ,以确保车辆动力性和经济性两者之间的协调,同时进一步提高能量的利用率,使
其中,γ0为设定的标准值,γ0=75%~80%;m为汽车的质量,单位为Kg,m0为设定的标准汽车质量,单位为Kg;v为汽车的车速,单位为Km/h,v0为设定的标准车速,v0=50~60,单位为Km/h;T为环境温度,单位为℃,T0为设定的标准环境温度,T0=20~25,单位为℃;RH为环境温相对湿度,RH0为设定的标准环境相对湿度,RH0=40~50。
本发明中可以通过多个路径提供或者回收能量,通过控制器的控制策略,可以保证始终以最优的方式进行能量的传递,保证了能量的高效利用。
本发明集恒压变量泵和液压变量马达的变量调节、液压系统功率调节、制动能量回收、剩余液压能回收于一体,相比于以往的串联式静液压驱动,实现了可逆式电机与驱动轮之间完全的解耦,也就是可逆式电机可以不随负载变化而变化,可以始终保持在自己的高效区工作,这对于提高经济性具有重大的意义。可逆式电机与机械传动模块之间通过液压连接,无直接的机械连接,可逆式电机只通过恒压变量泵将机械能转化为液压能,为整个液压系统提供稳定的恒压油源。液压蓄能器可以起到调节系统内部压力平衡,同时可以在制动时回收液压能,液压蓄能器中存储的能量在负载所需功率大于可逆式电机输出功率时,可以协助可逆式电机进行驱动,从而可以使可逆式电机始终在高效区工作;同时蓄能器中存储的能量还可以在车辆紧急加速时提供额外的功率,这样可以使可逆式电机的最高功率选的小一些,有利于减小可逆式电机的体积,从而使整车质量更轻,进一步减少能耗。同时本发明通过调节斜盘式轴向变量马达的斜盘倾斜角可以实现无级变速,同时有效改善了液压系统容易泄漏、功率损耗大、冲击振动大的缺点。
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
一种车辆驱动系统及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0