

IPC分类号 : B60Q9/00I,B60R16/02I,B62D1/00I,B60T7/12I





专利摘要
本发明公开车辆被动安全控制领域中的一种紧急状态下车辆稳定行驶智能控制方法,采用车载传感器感知驾驶员手与车辆方向盘的接触面积以及手操控方向盘的时间,进而由方向盘接触信息处理模块判定数据所处的类别范围,由车辆行驶紧急状态划分模块根据数据所处的类别范围划分紧急状态的不同类别,由控制模式输出模块根据不同的紧急状态类别输出不同的控制方法,对车辆稳定行驶采取进行针对性的控制,能智能监控车辆行驶中驾驶员可能遇到的紧急情况,从而提高车辆行驶过程的安全性,为驾驶员的安全提供保障。
权利要求
1.一种紧急状态下车辆稳定行驶智能控制方法,其特征是包括以下步骤:
A、采用车载传感器感知驾驶员手与车辆方向盘的接触面积
B、所述的方向盘接触信息处理模块将接触面积
预设的接触面积区间是[
若接触面积
若
若
若
C、所述的车辆行驶紧急状态划分模块根据所述的区间电压值划分相应的紧急状态类别,并输出相应的状态类别电压值给控制模式输出模块;
D、控制模式输出模块根据不同的所述的状态类别电压值,输出相对应的控制方法控制车载报警装置、方向盘自锁装置以及智能手刹控制系统。
2.根据权利要求1所述的一种紧急状态下车辆稳定行驶智能控制方法,其特征是:步骤C中,当车辆行驶紧急状态划分模块接收到区间电压值
当接收到区间电压值
当接收到区间电压值
当接收到区间电压值
3.根据权利要求2所述的一种紧急状态下车辆稳定行驶智能控制方法,其特征是:步骤D中,当控制模式输出模块接收到状态类别电压值
当控制模式输出模块接收到状态类别电压值
当控制模式输出模块接收到状态类别电压值
当控制模式输出模块接收到状态类别电压值
4.根据权利要求3所述的一种紧急状态下车辆稳定行驶智能控制方法,其特征是:在方向盘自锁装置和车载报警装置同时工作时,当驾驶员接收到车载报警装置的警示提醒时开始操纵方向盘后,方向盘自锁装置停止工作。
5.根据权利要求3所述的一种紧急状态下车辆稳定行驶智能控制方法,其特征是:当控制方向盘自锁装置和智能手刹控制系统同时工作时,先控制方向盘不发生转动,同时启动电智能手刹控制系统使车辆减速制动。
说明书
技术领域
本发明涉及车辆被动安全控制领域,特别是一种针对车辆在紧急状态下实现稳定行驶的智能控制方法。
背景技术
车辆在行驶过程中,由于各种因素,驾驶员会发生许多不可控的紧急情况,如果对于突发紧急情况不进行及时处理与控制,会引发重大交通事故,因此在紧急状态下对于车辆的稳定行驶进行及时控制是十分有必要的。
现有车辆稳定行驶的控制方法,是智能调整方向盘的转向系统,使得驾驶员操纵更为舒适方便。如中国专利公开号为CN104627240B的文献中公开的一种基于网络的智能方向盘控制系统及控制方法,该控制系统能够适应不同驾驶习惯,具有智能化特点,同时能通过后台网络对驾驶员模型进行优化管理,该系统虽然能够智能调整方向盘转向系统,但却无法在紧急状况下对方向盘进行控制,从而适用范围较小,无法适应车辆行驶中多变的特殊情况。
发明内容
本发明的目的是针对上述问题,提出了一种紧急状态下车辆稳定行驶的智能控制方法,不仅能在特殊紧急状态下对车辆方向盘进行控制,同时还能通过报警装置以及智能手刹控制系统对车辆的稳定行驶进行控制,从而保障车辆行驶稳定性以及驾驶员安全。
本发明一种紧急状态下车辆稳定行驶智能控制方法采用的技术方案是包括以下步骤:
A、采用车载传感器感知驾驶员手与车辆方向盘的接触面积S以及驾驶员手控制方向盘的时间t,并将接触面积S传送到方向盘接触信息处理模块,时间t传送到车辆行驶紧急状态划分模块;
B、所述的方向盘接触信息处理模块将接触面积S与预设的接触面积区间进行比较,判定接触面积S所处的区间,并输出相对应的区间电压值给所述的车辆行驶紧急状态划分模块;
C、所述的车辆行驶紧急状态划分模块根据所述的区间电压值划分相应的紧急状态类别,并输出相应的状态类别电压值给控制模式输出模块;
D、控制模式输出模块根据不同的所述的状态类别电压值,输出相对应的控制方法控制车载报警装置、方向盘自锁装置以及智能手刹控制系统。
进一步地,步骤B中,预设的接触面积区间是[S0,S1)、[S1, S2)、[S2,S3]、(S3,S4],S0=0,S0<S1<S2<S3<S4,S4为方向盘总表面积;
若接触面积S∈[S2, S3],则方向盘接触信息处理模块判定驾驶员双手握住方向盘,输出区间电压值V1;
若S∈[S1, S2),则判定驾驶员单手操纵方向盘,输出区间电压值V2;
若S∈[S0,S1),则判定驾驶员双手脱离方向盘,输出区间电压值V3;
若S∈(S3, S4],则判定驾驶过程中发生紧急情况,输出区间电压值V4。
更进一步地,步骤C中,当车辆行驶紧急状态划分模块接收到区间电压值V1时,划分为安全操纵方向盘的状态类别E0,输出状态类别电压值V5;
当接收到区间电压值V2时,划分为紧急状态类别E1,将所述的时间t与预设的安全时间阈值T1进行比较,当时间t<T1时,划分为紧急状态类别E11,并输出状态类别电压值V6;当t≥T1时,划分为紧急状态类别E12,并输出状态类别电压值V7;
当接收到区间电压值V3时,划分为紧急状态类别E2,将所述的时间t与预设的警戒时间阈值T2进行比较,当t<T2时,划分为紧急状态类别E21,并输出状态类别电压值V8;当t≥T2时,划分为紧急状态类别E22,并输出状态类别电压值V9;
当接收到区间电压值V4时,划分为紧急状态类别E3,并输出状态类别电压值V10。
更进一步地,步骤D中,当控制模式输出模块接收到状态类别电压值V5时,驾驶员自主操纵方向盘;
当控制模式输出模块接收到状态类别电压值V6时,控制车载报警装置向驾驶员报警;
当控制模式输出模块接收到状态类别电压值V7或V8时,控制方向盘自锁装置和车载报警装置同时工作;
当控制模式输出模块接收到状态类别电压值V9或V10时,控制方向盘自锁装置和智能手刹控制系统同时工作。
本发明的有益效果是:
本发明利用车载传感器感知驾驶员手与车辆方向盘的接触面积以及手操控方向盘的时间,进而由方向盘接触信息处理模块判定数据所处的类别范围,由车辆行驶紧急状态划分模块根据数据所处的类别范围划分紧急状态的不同类别,由控制模式输出模块根据不同的紧急状态类别输出不同的控制方法,对车辆稳定行驶采取进行针对性的控制,能智能监控车辆行驶中驾驶员可能遇到的紧急情况,从而提高车辆行驶过程的安全性,为驾驶员的安全提供保障。
附图说明
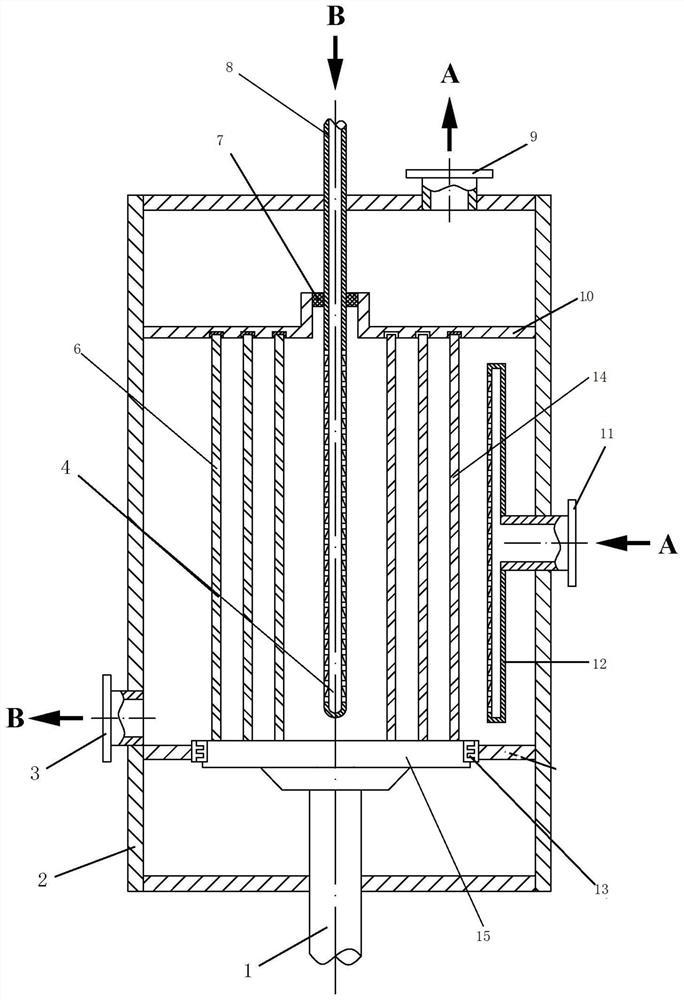
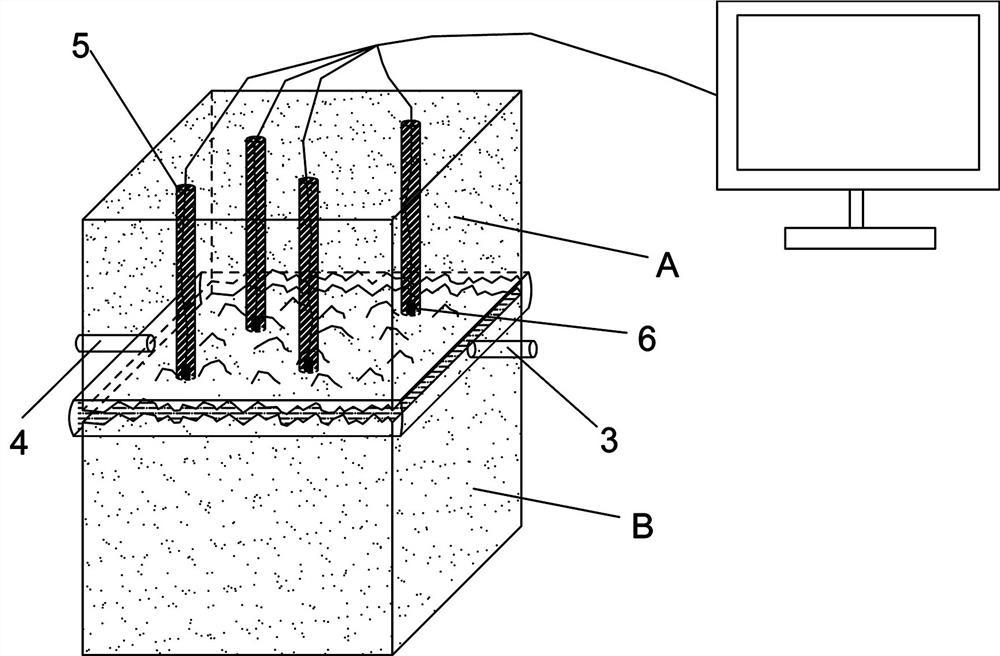
图1是实现本发明所述的控制方法的硬件结构图;
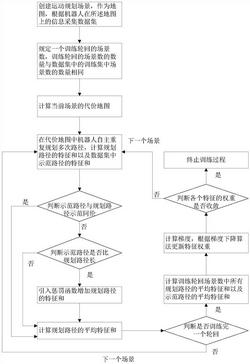
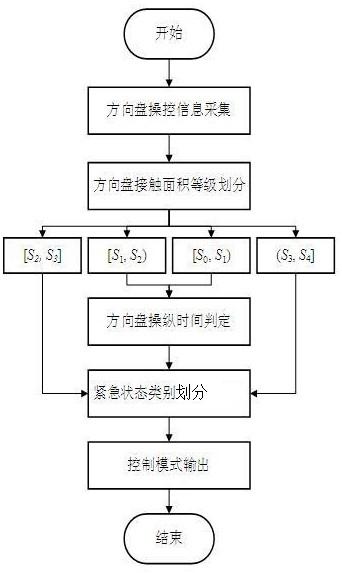
图2是本发明所述的控制方法的流程图。
具体实施方式
参见图1和图2所示,本发明采用安装在车辆方向盘上的车载传感器感知驾驶员手与车辆方向盘的接触面积S以及驾驶员手控制方向盘的时间t。车载传感器的输出端分别连接方向盘接触信息处理模块和车辆行驶紧急状态划分模块的输入端,将车辆方向盘的接触面积S传送到方向盘接触信息处理模块,将控制方向盘的时间t传送到车辆行驶紧急状态划分模块。方向盘接触信息处理模块的输出端连接车辆行驶紧急状态划分模块的输入端,车辆行驶紧急状态划分模块的输出端连接控制模式输出模块,控制模式输出模块的输出端分别连接车载报警装置、方向盘自锁装置以及智能手刹控制系统。车载报警装置、方向盘自锁装置和智能手刹控制系统安装在车辆上,由车辆自带。
方向盘接触信息处理模块接收到接触面积S数据后,对其进行处理。将接触面积S与预先设定的面积区间进行比较,判定接触面积S所处的区间范围,并输出相对应的电压信号。预先设定的面积区间是预先结合驾驶员的体态特征信息,根据不同驾驶员手大小有所不同这一特点,将驾驶员与方向盘的接触面积S分为以下几个区间:
(1)接触面积区间[S2,S3],S2<S3,属于驾驶员双手握住方向盘的区间;
(2)接触面积区间[S1,S2):S1<S2,属于驾驶员单手操纵方向盘的区间;
(3)无接触面积[S0,S1):属于驾驶员手与方向盘接触面积极小,可认定为双手脱离方向盘的区间;其中,S0=0,S0<S1;
(4)接触面积区间(S3, S4]:S3<S4,S4为方向盘总的表面积,即表示发生特殊紧急情况的的区间,如有除驾驶员之外的第三者违规触碰方向盘或驾驶员突发疾病完全扑倒在方向盘上的区间。
方向盘接触信息处理模块对接触面积S与预先设定的面积区间进行比较时,比较结果如下:
(1)若接触面积S∈[S2, S3],方向盘接触信息处理模块判定驾驶员双手握住方向盘,则方向盘接触信息处理模块输出区间电压值为V1的电压信号给车辆行驶紧急状态划分模块。
(2)若接触面积S∈[S1, S2),方向盘接触信息处理模块判定驾驶员单手操纵方向盘,输出区间电压值为V2的电压信号给车辆行驶紧急状态划分模块。
(3)若接触面积S∈[S0,S1),方向盘接触信息处理模块判定驾驶员双手脱离方向盘,此时输出区间电压值为V3的电压信号给车辆行驶紧急状态划分模块。
(4)若接触面积S∈(S3, S4],方向盘接触信息处理模块判定驾驶员驾驶过程中发生特殊紧急情况,如有除驾驶员之外的第三者违规触碰方向盘或驾驶员突发疾病完全扑倒在方向盘上,此时输出区间电压值为V4的电压信号给车辆行驶紧急状态划分模块。
方向盘接触信息处理模块将判定的结果以相对应的不同电压值的电压信号传递给车辆行驶紧急状态划分模块后,车辆行驶紧急状态划分模块根据电压值划分相应的紧急状态类别,并输出相应的电压信号。具体是:
(1)当车辆行驶紧急状态划分模块接收区间电压值V1的电压信号,即接触面积S∈[S2, S3]:此为安全操纵方向盘的标准方式,车辆正常行驶,不属于紧急状态,将此状态类别定义为E0,并输出状态类别电压值为V5的电压信号给控制模式输出模块。
(2)当车辆行驶紧急状态划分模块接收区间电压值为V2的电压信号,即接触面积S∈[S1, S2):当驾驶员单手操纵方向盘时,将紧急状态类别定义为E1。此时,车辆行驶紧急状态划分模块将手控制方向盘的时间t与预设的安全时间阈值T1进行比较。当驾驶员单手操纵方向盘时间t<T1时,紧急状态类别定义为E11,并输出状态类别电压值为V6的电压信号给控制模式输出模块;当驾驶员单手操纵方向盘时间超过安全时间阈值T1,即t≥T1时,紧急状态类别定义为E12,并输出状态类别电压值为V7的电压信号给控制模式输出模块。
(3)当车辆行驶紧急状态划分模块接收区间电压值为V3的电压信号,即接触面积[S0,S1),将驾驶员双手脱离方向盘的状态类别定义为紧急状态E2。此时,车辆行驶紧急状态划分模块将手控制方向盘的时间t与预设的警戒时间阈值T2进行比较。当t<T2时,紧急状态定义类别为E21,并输出电压值为V8的电压信号给控制模式输出模块;反之,当t≥T2时,紧急状态类别定义为E22,输出状态类别电压值为V9的电压信号给控制模式输出模块。
(4)当车辆行驶紧急状态划分模块接收区间电压值为V4的电压信号,即接触面积S∈(S3, S4]:表明发生特殊紧急情况(如有除驾驶员之外的第三者违规触碰方向盘或驾驶员突发疾病完全扑倒在方向盘上)的状态为紧急状态类别E3,并输出状态类别电压值为V10的电压信号给控制模式输出模块。
特别地,上述输出的电压信号中,V1≠V2≠V3≠V4≠V5≠V6≠V7≠V8≠V9≠V10。
车辆行驶紧急状态划分模块将划分好的紧急状态类别以相对应的电信号传递给控制模式输出模块,控制模式输出模块根据不同的紧急状态类别电压值信号,输出相对应的控制模式,对车辆稳定行驶采取进行针对性的控制,控制模式包括输出控制信号控制车载报警装置提醒驾驶员模式W1、方向盘自锁装置保持方向盘转动方向模式W2以及智能手刹控制系统自动启动电子手刹模式W3。
控制模式输出模块接收车辆行驶紧急状态划分模块的划分结果,输出相应的控制模式,具体是:
(1)当控制模式输出模块接收状态类别电压值为V5的电压信号,即当车辆行驶状态类别为E0时,由驾驶员自主操纵方向盘,无需提供控制方法。
(2)当控制模式输出模块接收状态类别电压值为V6的电压信号,即当紧急状态类别为E11时,表明紧急状态级别较低,所以使用控制模式W1,通过车载报警装置向驾驶员报警,提示驾驶员正确操纵方向盘。
(3)当控制模式输出模块接收状态类别电压值为V7、V8的电压信号,即当紧急状态类别为E12、E21时,表明紧急状态级别提高,车辆方向盘有可能失控,此时使用控制模式W2,方向盘自锁装置工作,保证当前方向盘不发生剧烈转动,同时一并使用控制模式W1,车载报警装置同时工作,提示驾驶员正确操纵方向盘。特别地,当驾驶员接收到车载报警装置的警示提醒时开始操纵方向盘后,方向盘自锁装置停止工作。
(4)当控制模式输出模块接收到状态类别电压值为V9、V10的电压信号,即当紧急状态类别为E22、E3时,表明处于十分紧急的危险状态,所以同时启用控制模式W2和W3,即控制模式输出模块输出控制信号控制方向盘自锁装置和智能手刹控制系统同时开始工作,先保证当前方向盘不发生剧烈转动,同时自动启动智能手刹控制系统,使车辆减速制动,避免车辆因方向盘失控而发生事故。特别地,本发明中的智能手刹控制系统采用的是中国专利公开号为CN108146412A、名称是“智能手刹控制系统及其方法”中提供的能够自动启动电子手刹的智能手刹控制系统。
一种紧急状态下车辆稳定行驶智能控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0