







专利摘要
本发明提供一种融合低速翼型的冯卡门乘波体设计方法,其乘波体下表面采用基于绕尖头冯卡门曲线回转体基准流场进行设计,得到冯卡门乘波面,乘波体上表面采用低速翼型上型线进行设计,得到融合低速翼型的上表面。在相同的亚声速来流条件下,具有融合低速翼型上表面的冯卡门乘波体相较于具有自由流上表面的冯卡门乘波体,前者的上表面负压区压力比后者的更小,与此同时,两者下表面压力基本相同,从而使得前者的上、下表面压力差大于后者的,进而使得前者的“升阻比”比后者的更大,即前者比后者具有更优良的低速升阻比性能。本发明提高了冯卡门乘波体低速升阻比性能,更有利于该类乘波体应用于宽速域飞行器设计。
权利要求
1.一种融合低速翼型的冯卡门乘波体设计方法,其特征在于,包括以下步骤:
步骤S1、将冯卡门曲线回转体母线修型为尖头冯卡门曲线回转体母线,由尖头冯卡门曲线回转体母线确定生成尖头冯卡门曲线回转体;
步骤S2、应用特征性理论,求解绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场;
步骤S3、给定乘波体前缘线在回转体底部横截面的投影型线即前缘线底部投影型线,由前缘线底部投影型线求解得到乘波体前缘线,从乘波体前缘线出发,求解经过乘波体前缘线的所有流线,直至回转体底部横截面位置,进而得到乘波体下表面后缘线,经过乘波体前缘线的所有流线放样成流面,该流面作为乘波体下表面;
步骤S4、给定低速翼型的上型线作为乘波体上表面基准型线,其中乘波体上表面基准型线沿x轴方向的长度为La;
步骤S5、在S3中生成的每条流线所在的流向截面中,将乘波体上表面基准型线等比例缩放到各流向截面中流线的尺寸,作为各流向截面中流线所对应的上表面型线,所有上表面型线放样构成乘波体上表面;
步骤S6、将前缘线底部投影型线和乘波体下表面后缘线所确定的平面区域构成乘波体底面,乘波体上表面、乘波体下表面和乘波体底面共同组成融合低速翼型的冯卡门乘波体。
2.根据权利要求1所述的融合低速翼型的冯卡门乘波体设计方法,其特征在于,S1中,给定冯卡门曲线回转体的长度和底部半径,利用公式(1)确定冯卡门曲线回转体母线的外形,即冯卡门曲线回转体母线在圆柱坐标系的轴向坐标轴x上的坐标值和径向坐标轴r上的坐标值,其中,圆柱坐标系的轴向坐标轴x为尖头冯卡门曲线回转体的回转轴线,冯卡门曲线回转体母线起始点在圆柱坐标系的轴向坐标轴x上,冯卡门曲线回转体母线末端点在冯卡门曲线回转体的底部横截面上;
其中,x为冯卡门曲线回转体母线在圆柱坐标系的轴向坐标轴中的坐标值,r为冯卡门曲线回转体母线在圆柱坐标系的径向坐标轴中的坐标值,L为冯卡门曲线回转体的长度,R为冯卡门曲线回转体的底部半径。
3.根据权利要求2所述的融合低速翼型的冯卡门乘波体设计方法,其特征在于,S1中,尖头冯卡门曲线回转体母线的确定方法是:
在冯卡门曲线回转体母线上取1
根据公式(2)确定来流马赫数M所对应的最大激波角β
其中,β
然后将来流马赫数M和最大激波角β
沿1
4.根据权利要求3所述的所述的融合低速翼型的冯卡门乘波体设计方法,其特征在于,步骤S2中的实现方法是:
步骤S1生成的尖头冯卡门曲线回转体,在零攻角和超声速来流的作用下,产生前缘附体激波和超声速轴对称基准流场;
将超声速来流条件作为输入参数,超声速来流条件包括来流马赫数、来流静压、来流静温,利用有旋特征线方法求解绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场,进而分别得到前缘附体激波和激波波后的特征线网格节点的位置坐标和流动参数,位置坐标为特征线网格节点在圆柱坐标系下轴向坐标轴x上的坐标值和径向坐标轴r上的坐标值,流动参数包括当地静压、当地密度、当地速度、当地流动方向角,通过前缘附体激波上的特征线网格节点的位置坐标可以表示出前缘附体激波外形。
5.根据权利要求4所述的所述的融合低速翼型的冯卡门乘波体设计方法,其特征在于,步骤S3中,所述乘波体前缘线和乘波体下表面后缘线的确定方法如下:
以回转体底部截面的圆心O'作为原点建立回转体底部截面上的直角坐标系,y'轴为在回转体底部截面上的直角坐标系的纵轴;定义经过圆心O'的直线与y'轴的夹角为相位角,经过前缘线底部投影型线上某一前缘线底部投影点的最大相位角为φ
第i个流向截面与前缘线底部投影型线的交点为第i个流向截面对应的前缘线底部投影点,第i个流向截面与乘波体下表面后缘线的交点为第i个流向截面对应的下表面后缘点,第i个流向截面与前缘激波底部型线的交点为第i个流向截面对应的激波底部点;
由第i个流向截面对应的前缘线底部投影点的坐标值,根据步骤S2中求解得到的绕零攻角尖头冯卡门曲线回转体的前缘附体激波外形,经过第i个流向截面对应的前缘线底部投影点并与圆柱坐标系的轴向坐标轴平行的直线与前缘附体激波相交的交点是乘波体前缘线上的点即第i个流向截面对应的前缘点;从第i个流向截面对应的前缘点出发,将步骤S2中求解得到的绕零攻角尖头冯卡门曲线回转体的激波波后各特征线网格节点上的流动参数作为已知条件,利用流线追踪方法,求解经过第i个流向截面对应前缘点的流线,直至回转体底部横截面,经过第i个流向截面对应前缘点的流线在回转体底部横截面的末端点是乘波体下表面后缘线上的点即第i个流向截面对应的下表面后缘点;
用相同方法,求解得到2n-1个流向截面对应的前缘点,以及经过2n-1个前缘点的流线,并得到2n-1个流向截面对应的下表面后缘点,2n-1个前缘点连线组成乘波体前缘线,2n-1个前缘线底部投影点连线组成乘波体前缘线底部投影型线,2n-1个下表面后缘点连线组成乘波体下表面后缘线。
6.根据权利要求5所述的融合低速翼型的冯卡门乘波体设计方法,其特征在于,步骤S5的实现方法如下:
第i个流向截面中流线沿x轴方向的长度为La,i,将步骤S4中的乘波体上表面基准型线缩放La,i/La倍;然后将缩放后的上表面基准型线进行坐标变换,将其旋转变换到第i个流向截面;最后将经旋转变换到第i个流向截面的上表面基准型线平移,使其前端点与第i个流向截面对应的前缘点重合,得到第i个流向截面的流线所对应的低速翼型上表面型线,此时第i个流向截面的流线所对应的低速翼型上表面型线的后端点与第i个流向截面对应的前缘线底部投影点重合;用相同方法,求解得到各流向截面中流线所对应的上表面型线,将所有上表面型线放样构成乘波体上表面。
说明书
技术领域
本发明涉及高超声速飞行器气动外形设计技术领域,具体的涉及一种融合低速翼型的冯卡门乘波体设计方法。
背景技术
高超声速飞行器是指飞行马赫数大于5、以吸气式发动机或其组合发动机为主要动力或者无动力、能在大气层和跨大气层中远程飞行的飞行器,其应用形式包括高超声速巡航导弹、高超声速滑翔飞行器、高超声速有人/无人飞机、空天飞机和高超声速宽速域飞行器等多种飞行器。
高超声速飞行器气动外形主要有轴对称构型、升力体构型和乘波体构型三大类,其中,乘波体构型利用激波压缩原理(乘波原理)实现了在高超声速飞行条件下高升阻比的气动要求,从而使得乘波体成为高超声速飞行器的一种理想构型。
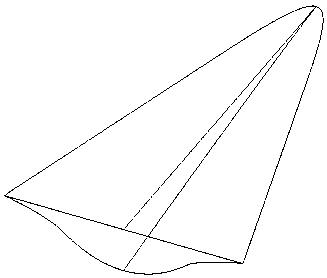
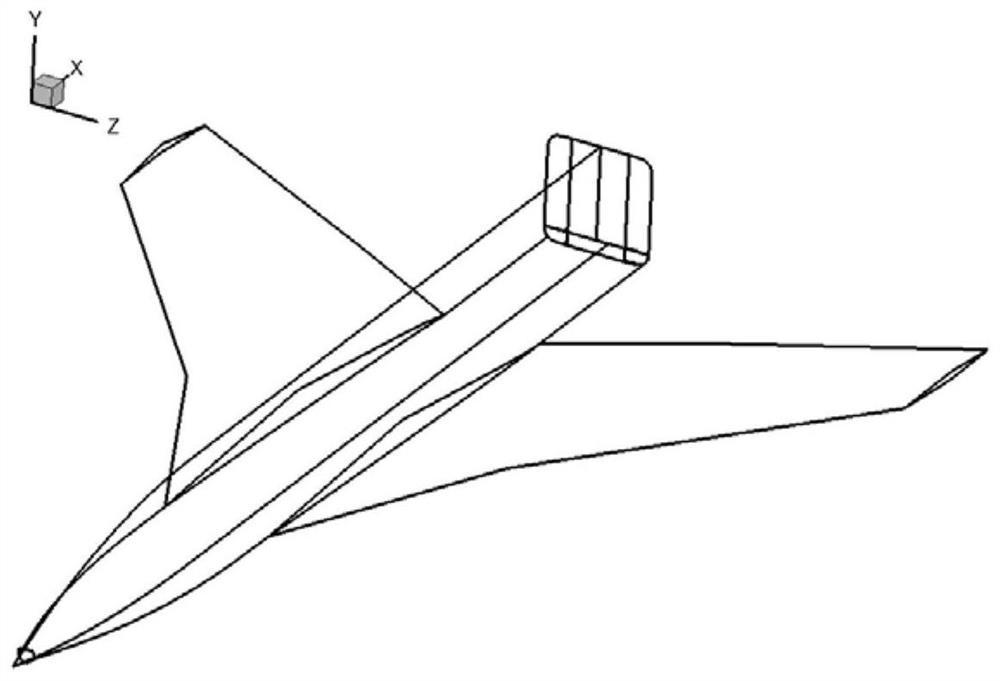
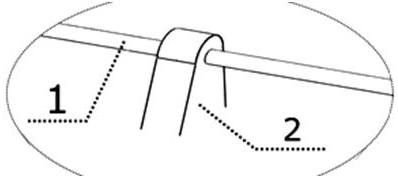
公开日为2014年12月10日,公开号为104192302A的发明专利,公开了一种基于绕尖头冯卡门曲线回转体基准流场的乘波体设计方法,其基本设计步骤是:首先将冯卡门曲线回转体母线修型为尖头冯卡门曲线回转体母线,设计尖头冯卡门曲线回转体;然后求解绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场;最后在绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场内进行流线追踪,生成乘波体气动外形。为了后文叙述方便,公开日为2014年12月10日,公开号为104192302A的发明专利中公开的基于绕尖头冯卡门曲线回转体基准流场的乘波体设计方法可以简称为原始冯卡门乘波体设计方法。如图1和2所示,前缘线1和前缘线在底部投影曲线2组成的平面作为原始冯卡门乘波体的上表面,即该乘波体的上表面是自由流面。由于原始冯卡门乘波体的上表面是自由流面,因此导致原始冯卡门乘波体存在一个明显缺陷,其在高超声速飞行条件下具有较高升阻比性能,但其在亚声速低速飞行阶段升阻比性能较低,这限制了原始冯卡门乘波体设计方法应用于宽速域飞行器设计时的飞行器低速飞行性能。
发明内容
针对现有技术存在的缺陷,本发明提供一种融合低速翼型的冯卡门乘波体设计方法,利用本发明提供的方法能够提高原始冯卡门乘波体在低速飞行时的升阻比性能。
为实现上述技术目的,本发明的技术方案是:
本发明提供一种融合低速翼型的冯卡门乘波体设计方法,包括以下步骤:
步骤S1、将冯卡门曲线回转体母线修型为尖头冯卡门曲线回转体母线,由尖头冯卡门曲线回转体母线确定生成尖头冯卡门曲线回转体。
给定冯卡门曲线回转体的长度和底部半径,利用公式(1)确定冯卡门曲线回转体母线的外形,即冯卡门曲线回转体母线在圆柱坐标系的轴向坐标轴x上的坐标值和径向坐标轴r上的坐标值,其中,圆柱坐标系的轴向坐标轴x为尖头冯卡门曲线回转体的回转轴线,冯卡门曲线回转体母线起始点在圆柱坐标系的轴向坐标轴x上,冯卡门曲线回转体母线末端点在冯卡门曲线回转体的底部横截面上。
其中,x为冯卡门曲线回转体母线在圆柱坐标系的轴向坐标轴中的坐标值,r为冯卡门曲线回转体母线在圆柱坐标系的径向坐标轴中的坐标值,L为冯卡门曲线回转体的长度,R为冯卡门曲线回转体的底部半径。
在冯卡门曲线回转体母线上取1
根据公式(2)可以确定来流马赫数M所对应的最大激波角βm,然后将来流马赫数M和最大激波角βm作为已知条件,通过数值积分Taylor-Maccoll锥形流动控制方程,能够唯一确定能够保证圆锥产生附体激波的最大圆锥半顶角δm。圆锥半顶角如果大于δm,圆锥将会产生脱体激波,为了确保尖头冯卡门曲线回转体在超声速来流条件下能够产生附体激波,1
其中,βm是来流马赫数M所对应的最大激波角,M是来流马赫数,γ为气体的定压比热与定容比热的比热比。
沿1
通过上述方式确定的尖头冯卡门曲线回转体,在零攻角和超声速来流条件下,可以确保产生前缘附体激波,并且激波波后的流场均是超声速轴对称基准流场,因此可以利用有旋特征线方法快速求解绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场。
步骤S2、应用特征性理论,求解绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场。
步骤S1生成的尖头冯卡门曲线回转体,在零攻角和超声速来流的作用下,产生前缘附体激波和激波波后超声速轴对称基准流场。
将来流条件作为输入参数,来流条件包括来流马赫数、来流静压、来流静温,利用有旋特征线方法,有旋特征线方法为本领域的公知技术,具体可参见“《气体动力学》,M.J.左克罗,J.D.霍夫曼,国防工业出版社,1984年,p138-195”,求解绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场,进而分别得到前缘附体激波和激波波后的特征线网格节点的位置坐标和流动参数,位置坐标为特征线网格节点在圆柱坐标系下轴向坐标轴x上的坐标值和径向坐标轴r上的坐标值,流动参数包括当地静压、当地密度、当地速度、当地流动方向角,通过前缘附体激波上的特征线网格节点的位置坐标可以表示出前缘附体激波外形。
步骤S3、给定乘波体前缘线在回转体底部横截面的投影型线即前缘线底部投影型线,由前缘线底部投影型线求解得到乘波体前缘线,从乘波体前缘线出发,求解经过乘波体前缘线的所有流线,直至回转体底部横截面位置,进而得到乘波体下表面后缘线。经过乘波体前缘线的所有流线放样成流面,该流面作为乘波体下表面。
其中,所述乘波体前缘线和乘波体下表面后缘线的实现方式如下所述。
以回转体底部截面的圆心O'作为原点建立回转体底部截面上的直角坐标系,y'轴为在回转体底部截面上的直角坐标系的纵轴。定义经过圆心O'的直线与y'轴的夹角为相位角,经过前缘线底部投影型线上某一前缘线底部投影点的最大相位角为φmax。将最大相位角φmax等分为n份,定义相位角为 且垂直于回转体底部横截面的平面为第i个流向截面,i取值范围为1~2n-1,共有2n-1个相位角,共有2n-1个流向截面。
第i个流向截面与前缘线底部投影型线的交点为第i个流向截面对应的前缘线底部投影点,第i个流向截面与乘波体下表面后缘线的交点为第i个流向截面对应的下表面后缘点,第i个流向截面与前缘激波底部型线的交点为第i个流向截面对应的激波底部点。
由第i个流向截面对应的前缘线底部投影点的坐标值,根据步骤S2中求解得到的绕零攻角尖头冯卡门曲线回转体的前缘附体激波外形,经过第i个流向截面对应的前缘线底部投影点并与圆柱坐标系的轴向坐标轴平行的直线与前缘附体激波相交的交点是乘波体前缘线上的点即第i个流向截面对应的前缘点;从第i个流向截面对应的前缘点出发,将步骤S2中求解得到的绕零攻角尖头冯卡门曲线回转体的激波波后各特征线网格节点上的流动参数作为已知条件,利用流线追踪方法,流线追踪方法为本领域的公知技术,具体可参见“《基于特征线理论的流线追踪内转向进气道设计方法研究》,卫锋,国防科学技术大学学位论文,2012,p67-69”,求解经过第i个流向截面对应前缘点的流线,直至回转体底部横截面,经过第i个流向截面对应前缘点的流线在回转体底部横截面的末端点是乘波体下表面后缘线上的点即第i个流向截面对应的下表面后缘点。
用相同方法,求解得到2n-1个流向截面对应的前缘点,以及经过2n-1个前缘点的流线,并得到2n-1个流向截面对应的下表面后缘点,2n-1个前缘点连线组成乘波体前缘线,2n-1个前缘线底部投影点连线组成乘波体前缘线底部投影型线,2n-1个下表面后缘点连线组成乘波体下表面后缘线。
步骤S4、给定低速翼型的上型线作为乘波体上表面基准型线,乘波体上表面基准型线沿x轴方向的长度为La。
其中低速翼型是本领域的通用技术术语,具体可参见“安德烈.索伯斯特.飞机气动设计:几何与优化[M].北京:国防工业出版社,2017:78-80”,低速翼型的上型线是低速翼型的上表面型线。
步骤S5、在每条流线所在的流向截面中,将乘波体上表面基准型线等比例缩放到各流向截面中流线的尺寸,作为各流向截面中流线所对应的上表面型线,所有上表面型线放样构成低速翼型上表面。
第i个流向截面中流线沿x轴方向的长度为La,i,将步骤S4中的乘波体上表面基准型线缩放La,i/La倍;然后将缩放后的上表面基准型线进行坐标变换,将其旋转变换到第i个流向截面;最后将经旋转变换到第i个流向截面的上表面基准型线平移,使其前端点与第i个流向截面对应的前缘点重合,得到第i个流向截面的流线所对应的低速翼型上表面型线,此时第i个流向截面的流线所对应的低速翼型上表面型线的后端点与第i个流向截面对应的前缘线底部投影点重合。用相同方法,求解得到各流向截面中流线所对应的上表面型线,将所有上表面型线放样构成乘波体上表面,即为融合低速翼型的冯卡门乘波体上表面。
步骤S6、将前缘线底部投影型线和乘波体下表面后缘线所确定的平面区域构成乘波体底面,乘波体上表面、乘波体下表面和乘波体底面共同组成融合低速翼型的冯卡门乘波体。
相对现有技术,本发明的技术效果:
乘波体下表面采用基于绕尖头冯卡门曲线回转体基准流场进行设计,得到冯卡门乘波面,乘波体上表面采用低速翼型上型线进行设计,得到融合低速翼型的上表面。在相同的亚声速来流条件下,具有融合低速翼型上表面的冯卡门乘波体相较于具有自由流上表面的冯卡门乘波体,前者的上表面负压区压力比后者的更小,与此同时,两者下表面压力基本相同,从而使得前者的上、下表面压力差大于后者的,进而使得前者的“升阻比”比后者的更大,即前者比后者具有更优良的低速升阻比性能。
本发明提高了冯卡门乘波体低速升阻比性能,更有利于该类乘波体应用于宽速域飞行器设计。
附图说明
图1示出了具有自由流上表面的原始冯卡门乘波体的等轴测视图;
图2示出了具有自由流上表面的原始冯卡门乘波体的侧视图;
图1和图2中:1表示原始冯卡门乘波体设计方法中的前缘线,2表示原始冯卡门乘波体设计方法中的前缘线在底部投影型线,3表示由自由流面构成的原始冯卡门乘波体上表面。
图3示出了给定回转体长度和半径的冯卡门曲线回转体母线示意图;
图4示出了尖头冯卡门曲线回转体母线示意图;
图5示出了绕零攻角尖头冯卡门曲线回转体的前缘附体激波和轴对称基准流场示意图;
图6示出了在绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场设计乘波体下表面的示意图;
图7示出了一族流线放样组合生成乘波体的下表面;
图8示出了乘波体底部型线和激波底部型线以及第i个流向截面选取示意图;
图9示出了第i个流向截面中求解流线的示意图;
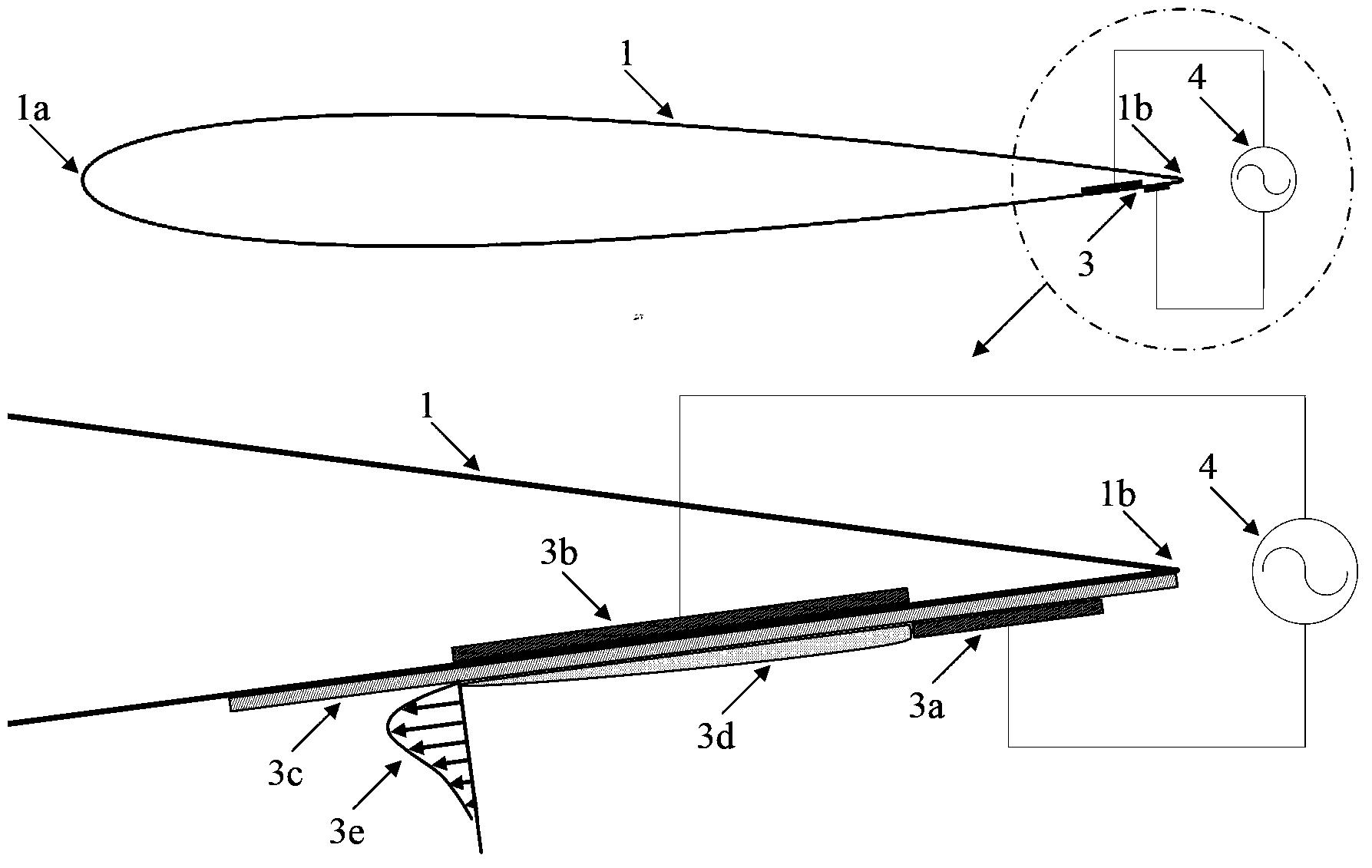
图10示出了低速翼型上型线和下型线示意图;
图11示出了第i个流向截面中设计上表面型线的示意图;
图12示出了将一族上表面型线放样生成乘波体的上表面;
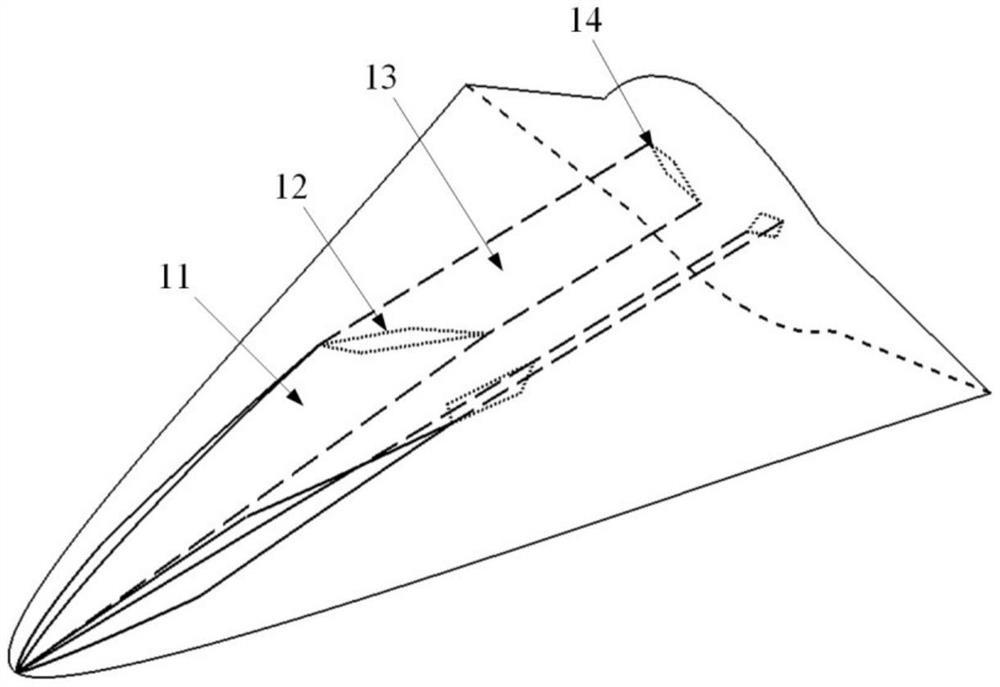
图13示出了融合低速翼型的冯卡门乘波体的侧视图;
图14示出了融合低速翼型的冯卡门乘波体的等轴测视图;
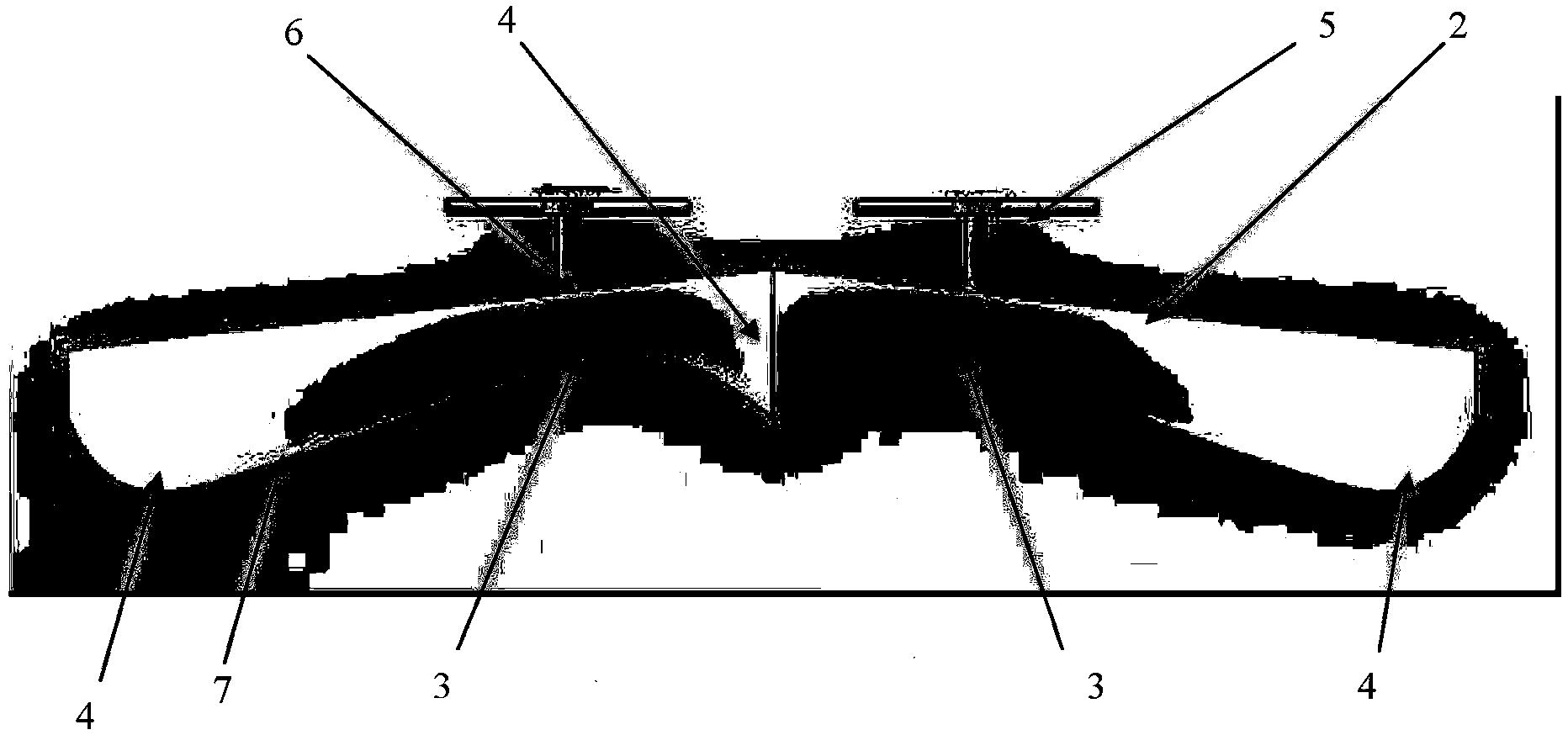
图15示出了融合低速翼型的冯卡门乘波体外形与由自由流面作为上表面的原始冯卡门乘波体外形的等轴测视图对比;
图16示出了融合低速翼型的冯卡门乘波体外形与由自由流面作为上表面的原始冯卡门乘波体外形的正视图对比;
图17为在马赫数0.2飞行条件下,融合低速翼型的冯卡门乘波体和由自由流面作为上表面的原始冯卡门乘波体在底部横截面的数值计算流场对比;
图18为在马赫数0.2飞行条件下,融合低速翼型的冯卡门乘波体和由自由流面作为上表面的原始冯卡门乘波体的数值计算升阻比性能对比。
图3至图14中:4表示冯卡门曲线回转体母线起始点;5表示冯卡门曲线回转体母线末端点;6表示冯卡门曲线回转体母线;7表示冯卡门曲线回转体的底部横截面;8表示冯卡门曲线回转体的长度;9表示冯卡门曲线回转体的底部半径;10表示在冯卡门曲线回转体母线上选取的1
19表示尖头冯卡门曲线回转体在底部横截面7的型线,简称为尖头冯卡门曲线回转体底部型线;20表示前缘附体激波15在底部横截面7的型线,简称前缘激波底部型线;21表示乘波体前缘线;22表示乘波体前缘线21在回转体底部横截面7的投影型线,简称前缘线底部投影型线;23表示乘波体下表面后缘线;24表示前缘线底部投影型线的左侧端点;25表示前缘线底部投影型线的右侧端点;26表示前缘线底部投影型线的中点;27表示经过前缘线底部投影型线上的一前缘线底部投影点的最大相位角;28表示第i个流向截面的相位角;29表示第i个流向截面对应的前缘线底部投影点,简称前缘线底部投影点;30表示第i个流向截面与前缘激波底部型线的交点,简称激波底部点;31表示第i个流向截面对应的下表面后缘点,简称下表面后缘点;32表示经过前缘线底部投影点29并与圆柱坐标系的轴向坐标轴平行的直线;33表示第i个流向截面对应的前缘点;34表示经过第i个流向截面对应的前缘点的流线;35表示经过所有前缘点生成的一族流线;36表示低速翼型的上型线;37表示低速翼型的下型线;38表示第i个流向截面的流线所对应的低速翼型上表面型线;39表示由各流向截面中流线所对应的上表面型线组成一族低速翼型上表面型线;40表示乘波体上表面;41表示乘波体下表面;42表示乘波体底面;43表示低速翼型的前端点;44表示低速翼型的后端点。
具体实施方式
下面结合附图3至18,对本发明的具体实施方法进行进一步的说明。本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
一种融合低速翼型的冯卡门乘波体设计方法,包括以下步骤:
步骤S1、将冯卡门曲线回转体母线修型为尖头冯卡门曲线回转体母线,由尖头冯卡门曲线回转体母线确定生成尖头冯卡门曲线回转体。
如图3所示,曲线4-5是冯卡门曲线回转体母线6,给定冯卡门曲线回转体的长度和底部半径,利用公式(1)确定冯卡门曲线回转体母线6的外形,即冯卡门曲线回转体母线6在圆柱坐标系的轴向坐标轴x上的坐标值和径向坐标轴r上的坐标值,其中,圆柱坐标系的轴向坐标轴x为尖头冯卡门曲线回转体的回转轴线,冯卡门曲线回转体母线起始点4在圆柱坐标系的轴向坐标轴x上,冯卡门曲线回转体母线末端点5在冯卡门曲线回转体的底部横截面上。
其中,x为冯卡门曲线回转体母线6在圆柱坐标系的轴向坐标轴中的坐标值,r为冯卡门曲线回转体母线6在圆柱坐标系的径向坐标轴中的坐标值,L为冯卡门曲线回转体的长度,R为冯卡门曲线回转体的底部半径。
如图4所示,在冯卡门曲线回转体母线6上取1
根据公式(2)可以确定来流马赫数M所对应的最大激波角βm,然后将来流马赫数M和最大激波角βm作为已知条件,通过数值积分Taylor-Maccoll锥形流动控制方程,能够唯一确定能够保证圆锥产生附体激波的最大圆锥半顶角δm。圆锥半顶角如果大于δm,圆锥将会产生脱体激波,为了确保尖头冯卡门曲线回转体在超声速来流条件下能够产生附体激波,1
其中,βm是来流马赫数M所对应的最大激波角,M是来流马赫数,γ为气体的定压比热与定容比热的比热比。
如图4所示,沿1
通过上述方式确定的尖头冯卡门曲线回转体,在零攻角和超声速来流条件下,可以确保产生前缘附体激波,并且激波波后的流场均是超声速轴对称基准流场,因此可以利用有旋特征线方法快速求解绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场。
步骤S2、应用特征性理论,求解绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场。
如图5所示,步骤S1生成的尖头冯卡门曲线回转体,在零攻角和超声速来流条件14的作用下,产生前缘附体激波15和激波波后超声速轴对称基准流场16。
将超声速来流条件14作为输入参数,超声速来流条件14包括来流马赫数、来流静压、来流静温,利用有旋特征线方法,有旋特征线方法为本领域的公知技术,具体可参见“《气体动力学》,M.J.左克罗,J.D.霍夫曼,国防工业出版社,1984年,p138-195”,求解绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场,进而分别得到前缘附体激波15和激波波后的特征线网格节点的位置坐标和流动参数,其中位置坐标为特征线网格节点在圆柱坐标系下轴向坐标轴x上的坐标值和径向坐标轴r上的坐标值,流动参数包括当地静压、当地密度、当地速度、当地流动方向角。通过前缘附体激波15上的特征线网格节点的位置坐标可以表示出前缘附体激波15的外形。
步骤S3、应用流线追踪技术,在绕零攻角尖头冯卡门曲线回转体的超声速轴对称基准流场内进行流线追踪,生成一系列流线,所有流线放样构成乘波体下表面。
如图6所示,给定乘波体前缘线21在回转体底部横截面7的投影型线即前缘线底部投影型线22,由前缘线底部投影型线22求解得到乘波体前缘线21,从乘波体前缘线21出发,求解经过乘波体前缘线21的所有流线,直至回转体底部横截面7位置,进而得到乘波体下表面后缘线23。经过乘波体前缘线21的所有流线放样成流面,该流面作为乘波体下表面41。其中,如图7所示,35是经过前缘线的一族流线,将该族流线放样成流面,该流面作为乘波体的下表面41。
其中,所述乘波体前缘线和乘波体下表面后缘线的实现方式如下所述。
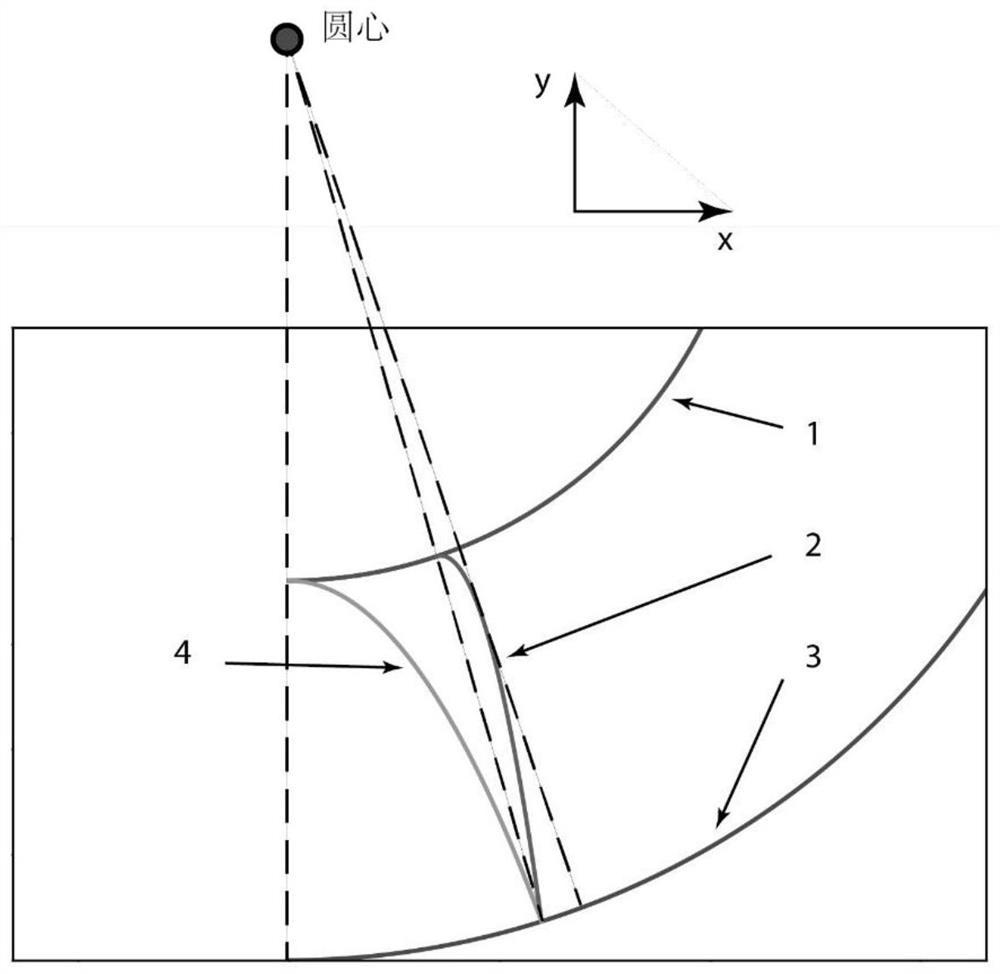
如图8所示,以回转体底部截面的圆心O'作为原点建立回转体底部截面上的直角坐标系,y'轴为在回转体底部截面上的直角坐标系的纵轴;定义经过圆心O'的直线与y'轴的夹角为相位角。其中,O’为在回转体底部截面上的直角坐标系的圆心,y’为在回转体底部截面上的直角坐标系的纵轴。27是经过前缘线底部投影型线上的前缘线底部投影点获得的最大相位角φmax。将最大相位角φmax等分为n份,28表示第i个流向截面的相位角,第i个流向截面的相位角28的值为 i取值范围为1~2n-1,共有2n-1个相位角。定义相位角为 且垂直于回转体底部横截面的平面为第i个流向截面,共有2n-1个流向截面。
如图8所示,第i个流向截面与前缘线底部投影型线的交点29为第i个流向截面对应的前缘线底部投影点,第i个流向截面与乘波体下表面后缘线的交点31为第i个流向截面对应的下表面后缘点,第i个流向截面与前缘激波底部型线的交点30为第i个流向截面对应的激波底部点30。
如图9所示为第i个流向截面,由第i个流向截面对应的前缘线底部投影点29的坐标值,根据步骤S2中求解得到的绕零攻角尖头冯卡门曲线回转体的前缘附体激波外形,用经过第i个流向截面对应的前缘线底部投影点29并与圆柱坐标系的轴向坐标轴平行的直线32与前缘附体激波15相交的交点是乘波体前缘线上的点即第i个流向截面对应的前缘点33;从第i个流向截面对应的前缘点33出发,将步骤S2中求解得到的绕零攻角尖头冯卡门曲线回转体的激波波后各特征线网格节点上的流动参数作为已知条件,利用流线追踪方法,流线追踪方法为本领域的公知技术,具体可参见“《基于特征线理论的流线追踪内转向进气道设计方法研究》,卫锋,国防科学技术大学学位论文,2012,p67-69”,求解经过第i个流向截面对应的前缘点的流线34,直至回转体底部横截面7,流线在回转体底部横截面7的末端点是乘波体下表面后缘线上的点即第i个流向截面对应的下表面后缘点31。
用相同方法,求解得到2n-1个流向截面对应的前缘点,以及经过2n-1个前缘点的流线,并得到2n-1个流向截面对应的下表面后缘点,2n-1个前缘点连线组成乘波体前缘线21,2n-1个前缘线底部投影点连线组成乘波体前缘线底部投影型线22,2n-1个下表面后缘点连线组成乘波体下表面后缘线23。
步骤S4、选取低速翼型的上型线作为乘波体上表面基准型线,乘波体上表面基准型线沿x轴方向的长度为La。
其中低速翼型是本领域的通用技术术语,具体可参见“安德烈.索伯斯特.飞机气动设计:几何与优化[M].北京:国防工业出版社,2017:78-80”,低速翼型的上型线是低速翼型的上表面型线。
如图10所示的型线为低速翼型的基准型线,36表示低速翼型上型线,37表示低速翼型下型线,取出低速翼型上型线36作为乘波体上表面基准型线,基准型线沿x轴方向的长度为La。
步骤S5、在每条流线所在的流向截面中,将乘波体上表面基准型线等比例缩放到各流向截面中流线的尺寸,作为各流向截面中流线所对应的上表面型线,所有上表面型线放样构成低速翼型上表面。
第i个流向截面中流线沿x轴方向的长度为La,i,将步骤S4中的乘波体上表面基准型线缩放La,i/La倍;然后将缩放后的上表面基准型线进行坐标变换,将其旋转变换到第i个流向截面;最后将经旋转变换到第i个流向截面的上表面基准型线平移,使其前端点与第i个流向截面对应的前缘点33重合,得到第i个流向截面的流线所对应的低速翼型上表面型线38,此时第i个流向截面的流线所对应的低速翼型上表面型线38的后端点与第i个流向截面对应的前缘线底部投影点29重合。用相同方法,求解得到各流向截面中流线所对应的上表面型线,将所有上表面型线放样构成融合低速翼型的冯卡门乘波体上表面。
如图12所示,39是由各流向截面中流线所对应的上表面型线组成一族低速翼型上表面型线,将该族低速翼型上表面型线放样,构成乘波体上表面40,即为融合低速翼型的冯卡门乘波体上表面。
步骤S6、将前缘线底部投影型线和乘波体下表面后缘线所确定的平面区域构成乘波体底面42,乘波体上表面40、乘波体下表面41和乘波体底面42共同组成融合低速翼型的冯卡门乘波体。
参见图13和图14,将由前缘线底部投影型线22和乘波体下表面后缘线23组成的平面作为乘波体底面42;乘波体上表面40、乘波体下表面41和乘波体底面42组成了乘波体气动外形。
下面结合具体实施案例对本发明所提供的方法与背景技术中提到的原始冯卡门乘波体设计方法进行比较:
在马赫数6作为设计马赫数,生成了融合低速翼型的冯卡门乘波体外形,在相同的设计条件下生成了由自由流面作为上表面的原始冯卡门乘波体外形,前者的上表面是融合了低速翼型,后者的上表面是自由流面,且两者的乘波体下表面是相同的。两个外形的等轴测视图对比和正视图对比分别如图15和图16所示,图15和图16的左侧均为融合低速翼型的冯卡门乘波体外形,右侧均为由自由流面作为上表面的原始冯卡门乘波体外形。
图17示出了在马赫数0.2飞行条件下,融合低速翼型的冯卡门乘波体和由自由流面作为上表面的原始冯卡门乘波体在底部横截面的数值计算流场对比,该流场图显示的参数是压升比(当地静压与自由来流静压的比值),图17的左侧图为融合低速翼型的冯卡门乘波体的流场,图17的右侧图为由自由流面作为上表面的原始冯卡门乘波体的流场。
图18示出了在马赫数0.2飞行条件下,融合低速翼型的冯卡门乘波体和由自由流面作为上表面的原始冯卡门乘波体的数值计算升阻比性能对比,图18的实线为融合低速翼型的冯卡门乘波体的升阻比曲线,图18的虚线为由自由流面作为上表面的原始冯卡门乘波体的升阻比曲线。
由图17可见,融合低速翼型的冯卡门乘波体相较于由自由流面作为上表面的原始冯卡门乘波体,两者的下表面压升比基本相同,但前者的上表面压升比小于后者的上表面压升比,从而使得前者的上、下表面压力差大于后者的上、下表面压力差,从而使得如图18所示的融合低速翼型的冯卡门乘波体的升阻比大于由自由流面作为上表面的原始冯卡门乘波体,前者的最大升阻比3.96相较于后者的最大升阻比3.6提高了10%。上述对比结果验证了本发明设计的融合低速翼型的冯卡门乘波体相较于由自由流面作为上表面的原始冯卡门乘波体,前者相较于后者在亚声速低速飞行条件下的升阻比性能得到明显提高,这改善了冯卡门乘波体应用于宽速域飞行器设计时的飞行器低速飞行性能。
综上所述,虽然本发明已以较佳实施例揭露如上,然本领域技术人员将清楚本发明的范围不限制于以上讨论的示例,有可能对其进行若干改变和修改,而不脱离所附权利要求书限定的本发明的范围。尽管己经在附图和说明书中详细图示和描述了本发明,但这样的说明和描述仅是说明或示意性的,而非限制性的。本发明并不限于所公开的实施例。
通过对附图,说明书和权利要求书的研究,在实施本发明时本领域技术人员可以理解和实现所公开的实施例的变形。在权利要求书中,术语“包括”不排除其他步骤或元素,而不定冠词“一个”或“一种”不排除多个。在彼此不同的从属权利要求中引用的某些措施的事实不意味着这些措施的组合不能被有利地使用。权利要求书中的任何参考标记不构成对本发明的范围的限制。
融合低速翼型的冯卡门乘波体设计方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0