

IPC分类号 : G03B37/00,G02B17/00,G02B17/06,H04N5/232





专利摘要
本发明涉及球形物料表面图像采集方法,特别是利用反射镜获取球形物料全部表面图像的采像方法,属于机器视觉分选技术范畴。通过单台相机一次成像得到球形物料全表面图像,快捷方便。所得由一幅正面图像(4)和紧密圆阵列在正面图像周围的三个背面图像(5)构成的集合图像中,每幅背面图像(5)均与正面图像(4)相切,且正面图像(4)的直径与每一幅背面图像(5)在其放射方向的尺寸相同,减少了比例变换处理量。凹面镜口径选取临界值,减少无效背景分割。正对相机的成像背景、除球形物料外易被凹面镜反射后进入相机的区域均布置为黑色,减少无效背景分割。采集到的集合图像中,背面图像紧密圆阵列在正面图像周围,使得每一幅图像中的有效像素集中,充分利用CCD感光器件的面积,提高了像素利用率。
权利要求
1.一种利用凹面镜采集球形物料全部表面图像的方法,其特征在于:所述方法包括以下步骤:
1)确定相机(1)的焦距f;球形物料(2)的半径R;根据采像的空间布局方式确定成像距离,从而确定球形物料(2)的球心到等效成像平面的距离H;
2)确定一个凹面镜(3)的曲率半径ρ、口径d,以及凹面镜(3)的回转轴与相机(1)的光轴的夹角θ,包括:
2.1)解以下方程组求得凹面镜(3)的曲率半径ρ、凹面镜(3)的曲率中心C(a,b)的X坐标值a和Z坐标值b,所述方程组如下:
其中,t的计算公式为:
2.2)凹面镜(3)的口径d的计算公式为:
2.3)凹面镜(3)的回转轴与相机(1)的光轴的夹角θ的计算公式为:
其中,步骤2.1、2.2和2.3的公式中:
a、b分别为凹面镜(3)的曲率中心的X坐标值和Z坐标值,单位为mm;
H—球形物料(2)的球心到等效成像平面的距离,单位为mm;
f—相机1的光心到等效成像面的距离,即焦距,单位为mm;
ρ—凹面镜(3)的曲率半径,单位为mm;
d—凹面镜(3)的口径,单位为mm;
θ—凹面镜(3)的回转轴CM与相机(1)光轴的夹角,单位为°;
t—正面图像的半径,也是像点B'的X坐标值,单位为mm;
R—球形物料(2)的半径,单位为mm;
点P(x
点E(x
λ
凹面镜3的形状为标准球冠;
3)根据步骤1的结果,将具有半径R的球形物料(2)置于相机(1)的镜头一侧,且球形物料(2)的球心位于相机(1)的光轴上,球形物料(2)的球心到等效成像平面的距离为H,相机(1)的焦距调节为f;
4)根据步骤1和2的结果,将凹面镜(3)布于相机(1)的镜头一侧,且凹面朝向相机(1)的镜头侧,凹面镜(3)的回转轴与相机(1)的光轴相交;凹面镜(3)的曲率半径为ρ、口径为d,凹面镜(3)的回转轴与相机(1)的光轴的夹角为θ;
5)确定布置的凹面镜(3)的个数m,m不小于3个,并且空间布置时各凹面镜(3)不发生干涉,各凹面镜围绕相机(1)的光轴圆周阵列布置,从而确定其余具有与步骤2中得到的相同曲率半径ρ、口径d的m-1个凹面镜(3)的布置方位;
6)按下相机(1)的快门,通过一次采集得到由一幅正面图像(4)和紧密圆阵列在正面图像周围的m个背面图像(5)构成的集合图像,每幅背面图像(5)均与正面图像(4)相切,且正面图像(4)的直径与每一幅背面图像(5)在其放射方向的尺寸相同,减少了比例变换处理量。
2.如权利要求1所述的利用凹面镜采集球形物料全部表面图像的方法,其特征在于:步骤5中,凹面镜(3)的个数为三个。
3.如权利要求1所述的利用凹面镜采集球形物料全部表面图像的方法,其特征在于:步骤4中,环境背景布置为黑色,减少无效背景分割。
说明书
技术领域
本发明涉及球形物料表面图像采集方法,特别是利用反射镜获取球形物料全部表面图像的采像方法,属于机器视觉分选技术范畴。
背景技术
机器视觉分选时,常以物料表面信息为依据,而表面信息又以图像信息为主。当对大量物料进行逐个甄别,快速获取物料表面的全部、真实图像,是实现在线、精准分选的关键。
当物料为球形和准球形时,受曲表面的限制,通过多次或多视角成像可实现多幅图像对物料表面的全部覆盖,但有限的图像理论上对球形物料表面上的局部特征均存在一定的失真度。为了全面和尽量真实获取球形物料表面信息,现有的技术方法包括:
1、多相机、多方位同时成像:在物料周围的多个方位上布置多个相机,同时获取物料表面不同方位上的多幅图像,并使多幅图像能够全部或冗余覆盖球形物料的整个表面。这种方法应用于少量样本的静态成像尚可,但对在线、动态成像时,多个相机布置于空间不同方位时常与物料运动及其它结构发生空间干涉。
2、物料姿态调整多次成像
利用承托装置,通过调整物料不同时间的姿态,用单个或多个机位、多次成像,也可用多幅图像实现球形物料的整个表面的全部或冗余覆盖。但物料运动调整系统复杂、可靠性差、效率低,常存在漏采和过度采集。
3、利用面镜反射成像
在已有技术中,常利用平面镜、锥台状镜面、抛物面镜、柱面镜等的反射作用,在单相机一次成像中,同时获得物料正面和背面的图像。其中在中国专利201010226335.7中,利用布置于物料背面的两块平面镜的反射作用,实现单相机、单次成像来反映圆柱形玉米穗的全部表面信息。受平面镜的光学特性制约,反射图像与正面图像存在尺寸变化,尤其是该技术应用于球形物料时,三幅图像不能覆盖全部球表面,导致漏采。与平面反射镜相比,抛物面反射镜既可获得球形物料的背面图像,且具有将反射图像放大的效果,但当不控制放大比例时,表面图像处理时涉及复杂数据转换,导致运算量大,数据处理时间长。
发明内容
为了快捷地获取球形物料表面的全部、真实图像信息,本发明提出了一种利用凹面镜采集球形物料全部表面图像的方法,利用单台相机和三个凹面镜,通过一次成像得到球形物料的全表面、等比例图像—即通过得到由一幅正面图像和紧密圆阵列在正面图像周围的三个背面图像构成的集合图像,并使每幅背面图像均与正面图像相切,且正面图像直径与每一幅背面图像在其放射方向的尺寸相同,全面、等比例地反映球形物料表面的全部、真实图像信息。
本发明上述目的是通过如下技术方案实现的:
一种利用凹面镜采集球形物料全部表面图像的方法,所述方法包括以下步骤:
1)确定相机1的焦距f;球形物料2的半径R;根据采像的空间布局方式确定成像距离,从而确定球形物料2的球心到等效成像平面的距离H;
2)确定一个凹面镜3的曲率半径ρ、口径d,以及凹面镜3的回转轴与相机1的光轴的夹角θ,包括:
2.1)解以下方程组求得凹面镜3的曲率半径ρ、凹面镜3的曲率中心C(a,b)的X坐标值a和Z坐标值b,所述方程组如下:
其中,t的计算公式为:
2.2)凹面镜3的口径d的计算公式为:
2.3)凹面镜3的回转轴与相机1的光轴的夹角θ的计算公式为:
其中,步骤2.1、2.2和2.3的公式中:
a、b分别为凹面镜3的曲率中心的X坐标值和Z坐标值,单位为mm;
H—球形物料2的球心到等效成像平面的距离,单位为mm;
f—相机1的光心到等效成像面的距离,即焦距,单位为mm;
ρ—凹面镜3的曲率半径,单位为mm;
d—凹面镜3的口径,单位为mm;
θ—凹面镜3的回转轴CM与相机1光轴的夹角,单位为°;
t—正面图像的半径,也是像点B'的X坐标值,单位为mm;
R—球形物料2的半径,单位为mm;
点P(xP,zP)、点Q(xQ,zQ)为凹面镜3上的反射点,其中过点Q(xQ,zQ)的反射光线与球形物料表面相切于点B,像点为B'(t,0),且点Q(xQ,zQ)处法线过球形物料2的球心;过点P(xP,zP)的反射光线与X轴的交点为像点P'(3t,0);
点E(xE,zE)是球形物料2通过凹面镜3上点P(xP,zP)反射成像的表面区域的边缘点;
λ1、λ2、λ3为四点共面系数;
凹面镜3的形状为标准球冠;
3)根据步骤1的结果,将具有半径R的球形物料2置于相机1的镜头一侧,且球形物料2的球心位于相机1的光轴上,球形物料2的球心到等效成像平面的距离为H,相机1的焦距调节为f;
4)根据步骤1和2的结果,将凹面镜3布于相机1的镜头一侧,且凹面朝向相机1的镜头侧,凹面镜3的回转轴与相机1的光轴相交;凹面镜3的曲率半径为ρ、口径为d,凹面镜3的回转轴与相机1的光轴的夹角为θ;
5)确定布置的凹面镜3的个数m,m不小于3个,并且空间布置时各凹面镜3不发生干涉,各凹面镜围绕相机1的光轴圆周阵列布置,从而确定其余具有与步骤2中得到的相同曲率半径ρ、口径d的m-1个凹面镜3的布置方位;
6)按下相机1的快门,通过一次采集得到由一幅正面图像4和紧密圆阵列在正面图像周围的m个背面图像5构成的集合图像,每幅背面图像5均与正面图像4相切,且正面图像4的直径与每一幅背面图像5在其放射方向的尺寸相同,减少了比例变换处理量。
步骤5中,凹面镜3的个数为三个。
步骤4中,环境背景布置为黑色,减少无效背景分割。
本发明的有益效果在于:
1、通过单台相机一次成像得到球形物料全表面图像,快捷方便。
2、所得由一幅正面图像4和紧密圆阵列在正面图像周围的三个背面图像5构成的集合图像中,每幅背面图像5均与正面图像4相切,且正面图像4的直径与每一幅背面图像5在其放射方向的尺寸相同,减少了比例变换处理量。
3、凹面镜口径选取临界值,减少无效背景分割。
4、正对相机的成像背景、除球形物料外易被凹面镜反射后进入相机的区域均布置为黑色,减少无效背景分割。
5、采集到的集合图像中,背面图像紧密圆阵列在正面图像周围,使得每一幅图像中的有效像素集中,充分利用CCD感光器件的面积,提高了像素利用率。
附图说明
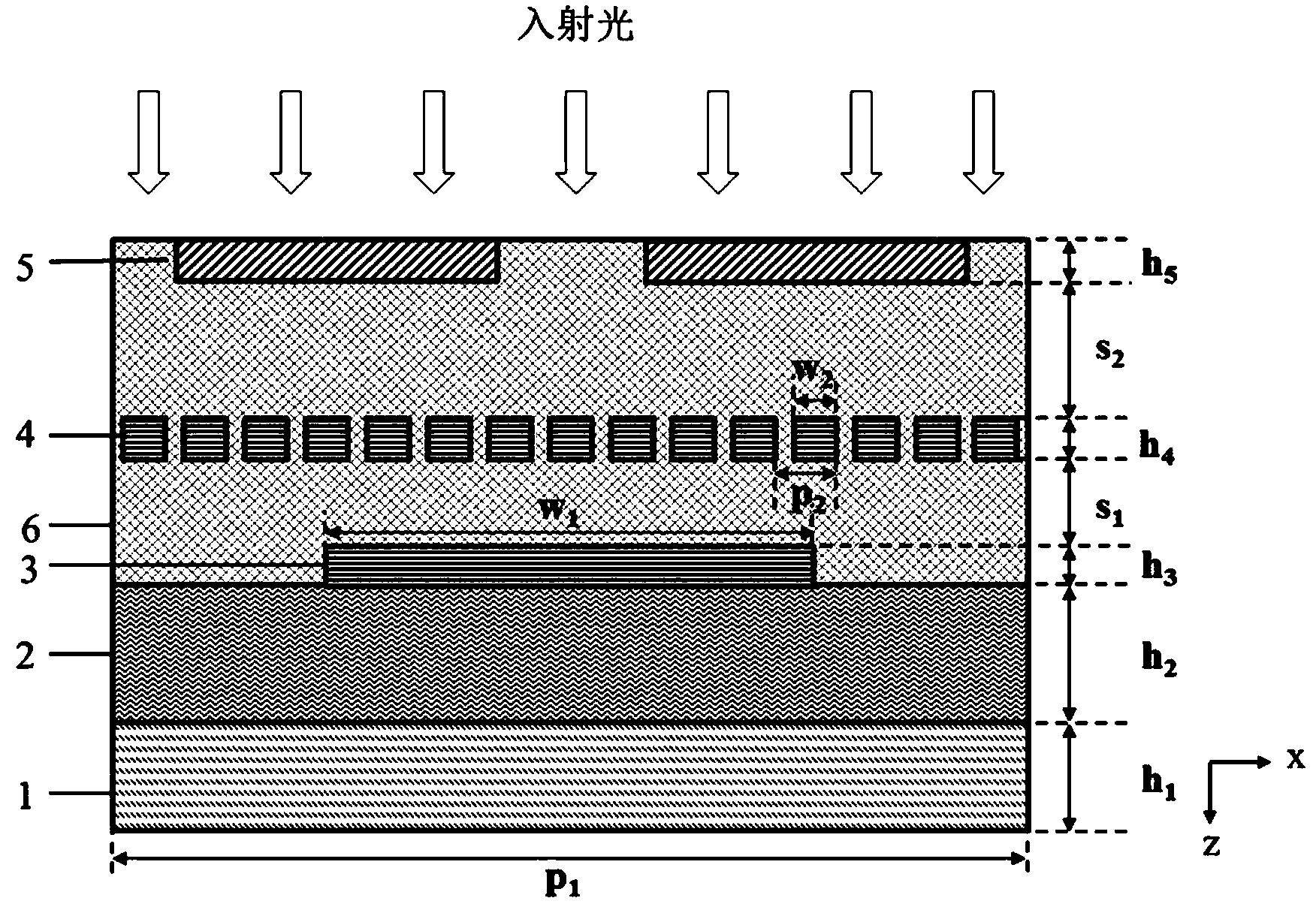
图1为凹面镜3的成像模型示意图;
图2为3个凹面镜组成的采像系统布局图;
图3为集合图像示意图。
附图标记:
1、相机
2、球形物料
3、凹面镜
4、正面图像
5、背面图像
S—相机1的光心;
O—等效成像平面中点,为平面坐标系O-XZ的坐标原点;
X轴—与CCD(电荷藕合器件图像传感器,Charge Coupled Device)的长边平行;
Z轴—相机1的光轴方向;
O'—球形物料2的球心;
Q—凹面镜3上的反射点;
A'、B'、P'—分别是点A、点B(Q)、点P在等效成像平面上的像点;
M—凹面镜3的顶点;
N—凹面镜3的回转轴与相机1的光轴的交点;
H—球形物料2的球心到等效成像平面的距离;
f—相机1的光心到等效成像面的距离(焦距);
ρ—凹面镜3的曲率半径;
d—凹面镜3的口径;
θ—凹面镜3的回转轴CM与相机1光轴的夹角;
t—正面图像的半径,也是像点B'的X坐标值。
具体实施方式
下面结合附图和实施例对本发明进行进一步说明。
图1为凹面镜3的成像模型示意图,其中,相机1、相机1的光心S、球形物料2、球形物料2的球心O'和凹面镜3曲率中心C位于同一平面内,建立与等效成像平面重合的平面坐标系O-XZ。其中,Z轴与相机1的光轴重合,X轴与相机1的感光元件—CCD(电荷藕合器件图像传感器,Charge Coupled Device)的长边平行。
点P(xP,zP)、点Q(xQ,zQ)为凹面镜3上的反射点,且点Q(xQ,zQ)处法线通过球形物料2的球心,满足方程组:
其中,a、b—凹面镜3曲率中心的X坐标值和Z坐标值,单位为mm;
ρ—凹面镜3的曲率半径,单位为mm;
H—球形物料2的球心到等效成像平面的距离,单位为mm;
f—相机1的光心到等效成像面的距离(焦距),单位为mm;
t—正面图像的半径,也是像点B'的X坐标值,单位为mm。
t的计算公式为:
点E(xE,zE)是球形物料2通过凹面镜3上点P(xP,zP)反射成像的表面区域的边缘点,满足方程组:
其中,R—球形物料2的半径,单位为mm。
根据光的反射定律可得:
其中,λ1、λ2、λ3为四点共面系数。
联立方程组1、3和4得到一个十一元一次方程,利用迭代法求方程的根,得到重要参数xP、zP、xQ、zQ、a、b、ρ的值。
则凹面镜3的口径d为:
M为凹面镜3的顶点,凹面镜3回转轴CM与相机1的光轴相交于点N,夹角为方位角θ,θ的计算公式为:
式5中所得凹面镜3的口径值为满足一个正面图像和紧密在正面图像周围的三个反映球形物料背面不同部位的背面图像在放射方向尺寸相等的临界值。在此方案确定的成像系统配置下,当凹面镜3的口径值小于此临界值时,各背面图像不能全部反映球形物料背对相机的表面的信息;当凹面镜3的口径大于此临界值时,凹面镜3的口径大小应满足圆周均匀阵列的三个凹面镜空间布置时互不干涉,此时,仍可满足正面图像和背面图像在放射方向相等,但会增加无效背景,加大了图像处理量。同时,在空间允许的情况下,增加凹面镜3的个数,可以降低球形物料2背面局部特征的失真度。
图2为三个凹面镜组成的采像系统布局图。
本发明提出了一种利用一台相机1和三个凹面镜3,获取由一个正面图像和多个背面图像构成的等比例集合图像,从而一次采集球形物料2全部表面图像的方法,所述方法包括以下步骤:
1、确定相机1的焦距f;球形物料2的半径R;根据采像的空间布局方式确定成像距离,从而确定球形物料2的球心到等效成像平面的距离H;
2、确定一个凹面镜3的曲率半径ρ、口径d,以及凹面镜3的回转轴与相机1的光轴的夹角θ,包括:
2.1、解以下方程组求得凹面镜3的曲率半径ρ、凹面镜3的曲率中心C(a,b)的X坐标值a和Z坐标值b,所述方程组如下:
其中,t的计算公式为:
2.2、凹面镜3的口径d的计算公式为:
2.3、凹面镜3的回转轴与相机1的光轴的夹角θ的计算公式为:
其中,步骤2.1、2.2和2.3的公式中:
a、b分别为凹面镜3的曲率中心的X坐标值和Z坐标值,单位为mm;
H—球形物料2的球心到等效成像平面的距离,单位为mm;
f—相机1的光心到等效成像面的距离(焦距),单位为mm;
ρ—凹面镜3的曲率半径,单位为mm;
d—凹面镜3的口径,单位为mm;
θ—凹面镜3的回转轴CM与相机1光轴的夹角,单位为°;
t—正面图像的半径,也是像点B'的X坐标值,单位为mm;
R—球形物料2的半径,单位为mm;
点P(xP,zP)、点Q(xQ,zQ)为凹面镜3上的反射点,其中过点Q(xQ,zQ)的反射光线与球形物料表面相切于点B,像点为B'(t,0),且点Q(xQ,zQ)处法线过球形物料2的球心;过点P(xP,zP)的反射光线与X轴的交点为像点P'(3t,0);
点E(xE,zE)是球形物料2通过凹面镜3上点P(xP,zP)反射成像的表面区域的边缘点;
λ1、λ2、λ3为四点共面系数。
凹面镜3的形状为标准球冠。
3、根据步骤1的结果,将具有半径R的球形物料2置于相机1的镜头一侧,且球形物料2的球心位于相机1的光轴上,球形物料2的球心到等效成像平面的距离为H,相机1的焦距调节为f。
优选地,步骤4中,环境背景布置为黑色,减少无效背景分割。
4、根据步骤1和2的结果,将凹面镜3以相机1的光轴为对称轴放射状均布于相机1的镜头一侧,且凹面朝向相机1的镜头侧,凹面镜3的回转轴与相机1的光轴相交。凹面镜3的曲率半径为ρ、口径为d,凹面镜3的回转轴与相机1的光轴的夹角为θ。
5、确定布置的凹面镜3的个数m,m不小于3个,并且空间布置时各凹面镜3不发生干涉。本实施例中,m的取值范围为3≤m≤6,各凹面镜3围绕相机1的光轴圆周阵列布置,从而确定其余具有与步骤2中得到的相同曲率半径ρ、口径d的m-1个凹面镜3的布置方位。
优选地,凹面镜3的个数为三个。
6、按下相机1的快门,通过一次采集,得到由一幅正面图像4和紧密圆阵列在正面图像周围的m个背面图像5构成的集合图像,每幅背面图像5均与正面图像4相切,且正面图像4的直径与每一幅背面图像5在其放射方向的尺寸相同,减少了比例变换处理量。
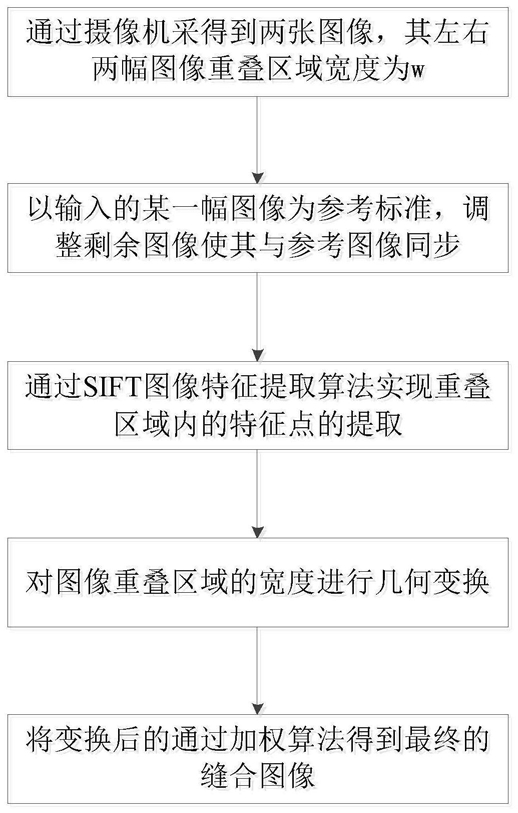
根据本发明提出的参数确定方法和步骤实施,选取球形物料2半径R=40mm,焦距f=50mm,球心到等效成像平面的距离H=200mm,解方程组得到:第一个凹面镜3的曲率半径ρ=480mm,曲率中心在平面坐标系O-XZ的坐标为C(-195.71,-120.43)、口径d=100mm、方位角θ=37.46°。各凹面镜围绕光轴圆周阵列布置,可得三个凹面镜3的布置方位,如图2所示。在此方案确定的成像参数配置下,通过相机1一次采像,得到一个正面图像、呈放射状紧密排布在正面图像周围的三个背面图像的集合图像,且集合图像中各幅图像在放射方向尺寸相等,如图3所示。
本实施例中,利用几何光学原理得到凹面镜3反射的球形物料2表面的区域边界曲线,以及该边界曲线通过凹面镜3反射后进入相机1所成图像的轮廓,结果显示,该图像轮廓在垂直于放射方向上的最大跨度尺寸与正面图像直径之比为0.8918。即当凹面镜3的口径值取临界值时,凹面镜3反映的球形物料2的表面区域可以全部通过凹面镜3反射进入相机1成像,避免了漏采,保证了利用一个相机1和三个凹面镜3,一次成像得到球形物料2的全部表面图像。在空间允许的情况下,本实施例可最多圆周均布六个凹面镜3,从而得到一个正面图像、呈放射状紧密排布在正面图像周围的六个背面图像的集合图像。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制。
一种利用凹面镜采集球形物料全部表面图像的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0