








专利摘要
本发明提供伊辛模型的量子计算装置,伊辛自旋测量步骤从结束全部伊辛自旋一组{σi}的测量后至再次开始全部伊辛自旋一组{σi}的测量为止,中断测量。在伊辛自旋测量步骤从结束全部伊辛自旋一组{σi}的测量后至再次开始全部伊辛自旋一组{σi}的测量为止,伊辛相互作用计算步骤根据最近的伊辛自旋σi的测量,能够带有充分时间余量地计算全部伊辛自旋σi相关的全部伊辛相互作用。
权利要求
1.一种伊辛模型的量子计算装置,其特征在于,包括:
简并光学参量振荡器,使多个模拟自旋脉冲进行简并光学参量振荡,所述多个模拟自旋脉冲与伊辛模型的多个自旋模拟对应且具有相同的振荡频率;
环谐振器,使所述多个模拟自旋脉冲环绕传输;
暂时自旋测量部,每当所述多个模拟自旋脉冲在所述环谐振器中环绕传输时,通过暂时地测量所述多个模拟自旋脉冲的相位,暂时地测量所述多个模拟自旋脉冲的模拟自旋时,在结束一组的测量之后至再次开始一组的测量为止中断测量;
相互作用计算部,在所述暂时自旋测量部结束一组的测量之后至再次开始一组的测量为止,根据所述伊辛模型的结合系数及所述暂时自旋测量部最近测量的所述多个模拟自旋脉冲的模拟自旋,暂时地计算所述多个模拟自旋脉冲相关的全部相互作用;
相互作用实施部,在所述相互作用计算部结束所述多个模拟自旋脉冲相关的全部相互作用的暂时计算之后,通过控制对所述多个模拟自旋脉冲注入的光的振幅及相位,暂时地实施所述相互作用计算部最近计算的所述多个模拟自旋脉冲相关的全部相互作用的大小及符号;
模拟自旋测量部,在重复由所述暂时自旋测量部、所述相互作用计算部及所述相互作用实施部构成的反馈循环的过程中,在所述多个模拟自旋脉冲达到稳定状态之后,通过测量所述多个模拟自旋脉冲的相位,测量所述多个模拟自旋脉冲的模拟自旋。
2.根据权利要求1所述的伊辛模型的量子计算装置,其特征在于,
所述环谐振器使与所述伊辛模型的所述多个自旋模拟对应的连续的所述多个模拟自旋脉冲环绕传输,
在所述暂时自旋测量部结束一组的测量之后至再次开始一组的测量为止,在所述环谐振器中环绕传输的所述多个模拟自旋脉冲分别通过一次以上从所述环谐振器向所述暂时自旋测量部的分路部位。
3.根据权利要求1所述的伊辛模型的量子计算装置,其特征在于,
所述环谐振器使与所述伊辛模型的所述多个自旋模拟对应的连续的所述多个模拟自旋脉冲和不与所述伊辛模型的所述多个自旋对应的连续的多个虚脉冲环绕传输,
在所述暂时自旋测量部结束一组的测量至再次开始一组的测量为止,在所述环谐振器中环绕传输的所述多个虚脉冲分别通过一次从所述环谐振器向所述暂时自旋测量部的分路部位。
4.根据权利要求3所述的伊辛模型的量子计算装置,其特征在于,
所述简并光学参量振荡器将所述多个虚脉冲的振荡相位及振荡强度分别控制为预定相位及预定强度,
所述伊辛模型的量子计算装置将所述多个虚脉冲用作参照信号,执行自身装置的相位特性的校准。
5.根据权利要求4所述的伊辛模型的量子计算装置,其特征在于,还包括环谐振长控制部,控制所述环谐振器的谐振长,以使所述多个虚脉冲的振荡强度最大化为所述预定强度。
6.根据权利要求4所述的伊辛模型的量子计算装置,其特征在于,还包括局部振荡光控制部,控制所述多个模拟自旋脉冲与所述暂时自旋测量部在所述多个模拟自旋脉冲的相位测量中使用的局部振荡光之间的干渉时刻,以使所述多个虚脉冲与所述暂时自旋测量部在所述多个模拟自旋脉冲的相位测量中使用的局部振荡光之间的干渉结果成为根据所述多个虚脉冲的预定振荡相位推断的预定干渉结果。
7.根据权利要求5所述的伊辛模型的量子计算装置,其特征在于,还包括局部振荡光控制部,控制所述多个模拟自旋脉冲与所述暂时自旋测量部在所述多个模拟自旋脉冲的相位测量中使用的局部振荡光之间的干渉时刻,以使所述多个虚脉冲与所述暂时自旋测量部在所述多个模拟自旋脉冲的相位测量中使用的局部振荡光之间的干渉结果成为根据所述多个虚脉冲的预定振荡相位推断的预定干渉结果。
8.根据权利要求4~7中任一项所述的伊辛模型的量子计算装置,其特征在于,还包括注入脉冲控制部,控制所述多个模拟自旋脉冲与所述相互作用实施部向所述多个模拟自旋脉冲的光注入中使用的具有考虑了相互作用的振荡相位的多个自旋注入脉冲之间的干渉时刻,以使所述多个虚脉冲与所述相互作用实施部向所述多个虚脉冲的光注入中使用的具有预定振荡相位的多个虚注入脉冲之间的干渉结果成为根据所述多个虚脉冲的预定振荡相位推断的预定干渉结果。
9.根据权利要求1~7中任一项所述的伊辛模型的量子计算装置,其特征在于,所述暂时自旋测量部结束一组的测量后至再次开始一组的测量为止的期间越长,所述相互作用实施部将对所述多个模拟自旋脉冲注入的光的振幅控制得越大。
10.根据权利要求8所述的伊辛模型的量子计算装置,其特征在于,所述暂时自旋测量部结束一组的测量后至再次开始一组的测量为止的期间越长,所述相互作用实施部将对所述多个模拟自旋脉冲注入的光的振幅控制得越大。
11.根据权利要求1~7中任一项所述的伊辛模型的量子计算装置,其特征在于,所述暂时自旋测量部结束一组的测量后至再次开始一组的测量为止的期间越长,所述简并光学参量振荡器将所述多个模拟自旋脉冲的简并光学参量振荡的泵浦速率控制得越小。
12.根据权利要求8所述的伊辛模型的量子计算装置,其特征在于,所述暂时自旋测量部结束一组的测量后至再次开始一组的测量为止的期间越长,所述简并光学参量振荡器将所述多个模拟自旋脉冲的简并光学参量振荡的泵浦速率控制得越小。
13.根据权利要求1~7中任一项所述的伊辛模型的量子计算装置,其特征在于,所述伊辛模型的图平均次数越高,所述相互作用实施部将对所述多个模拟自旋脉冲注入的光的振幅控制得越小。
14.根据权利要求8所述的伊辛模型的量子计算装置,其特征在于,所述伊辛模型的图平均次数越高,所述相互作用实施部将对所述多个模拟自旋脉冲注入的光的振幅控制得越小。
15.根据权利要求9所述的伊辛模型的量子计算装置,其特征在于,所述伊辛模型的图平均次数越高,所述相互作用实施部将对所述多个模拟自旋脉冲注入的光的振幅控制得越小。
16.根据权利要求10所述的伊辛模型的量子计算装置,其特征在于,所述伊辛模型的图平均次数越高,所述相互作用实施部将对所述多个模拟自旋脉冲注入的光的振幅控制得越小。
17.根据权利要求11所述的伊辛模型的量子计算装置,其特征在于,所述伊辛模型的图平均次数越高,所述相互作用实施部将对所述多个模拟自旋脉冲注入的光的振幅控制得越小。
18.根据权利要求12所述的伊辛模型的量子计算装置,其特征在于,所述伊辛模型的图平均次数越高,所述相互作用实施部将对所述多个模拟自旋脉冲注入的光的振幅控制得越小。
说明书
技术领域
本发明提供一种量子计算装置,其通过容易地解出伊辛模型,而能够容易地解出映射到伊辛模型的NP完全问题等。
背景技术
伊辛模型原来作为磁性材料模型来研究,但近来作为从NP完全问题等映射的模型而受到关注。但是,伊辛模型在位点数大时求解非常困难。因此,提出了实施伊辛模型的量子退火机或量子绝热机。
在量子退火机中,物理性实施伊辛相互作用及塞曼能后,将系统充分冷却,实现基底状态,并且观测基底状态,由此求解伊辛模型。但是,当位点数大时,系统在冷却的过程中陷入到准稳定状态,此外准稳定状态的数量相对于位点数以指数函数增大,因此存在系统不容易从准稳定状态缓和到基底状态的问题。
在量子绝热机中,物理性实施横磁场塞曼能后,将系统充分冷却,实现仅横磁场塞曼能的基底状态。而且,逐渐降低横磁场塞曼能,并逐渐物理性实施伊辛相互作用,实现包括伊辛相互作用及纵磁场塞曼能的系统基底状态,通过观测该基底状态,解开伊辛模型。但是,当位点的数量大时,存在如下问题:逐渐降低横磁场塞曼能,并逐渐物理性实施伊辛相互作用的速度需要相对于位点数以指数函数减缓。
当将NP完全问题等映射到伊辛模型,并在物理性自旋系统中实施该伊辛模型时,如下的自然法则成为问题:物理上位置近的位点间的伊辛相互作用大,物理上位置远的位点间的伊辛相互作用小。这是因为在映射NP完全问题的人工伊辛模型中,也可能存在物理上位置近的位点间的伊辛相互作用小,物理上位置远的位点间的伊辛相互作用大。向该自然的自旋系统的映射的难度也使得难以容易地解开NP完全问题等。
现有技术文献
专利文献
专利文献1:日本专利第5354233号公报
专利文献2:日本专利公开2014-134710号公报
非专利文献
非专利文献1:Z.Wang,A.Marandi,K.Wen,R.L.Byer and Y.Yamamoto,“ACoherent Ising Machine Based on Degenerate Optical Parametric Oscillators,”Phys.Rev.A88,063853(2013).
对用于解决上述问题的专利文献1、2及非专利文献1进行说明。NP完全问题能够替换为磁性体的伊辛模型,磁性体的伊辛模型能够替换为激光或激光脉冲的网络。
在此,在磁性体的伊辛模型中,在相互作用的原子对中,以使自旋排列的能量变为最低的方式使得自旋的方向指向反方向(反强磁性相互作用的情况)或同方向(强磁性相互作用的情况)。
另一方面,在激光或激光脉冲的网络中,在相互作用的激光对或激光脉冲对中,以使振荡模式的阈值增益变为最低的方式使振荡的偏光或者相位指向反转或反相位(反强磁性相互作用的情况)、或同转或同相位(强磁性相互作用的情况)。
也就是说,在由一个激光对或激光脉冲对构成的系统中,能够以使振荡模式的阈值增益变为最低的方式将振荡的偏光或相位最佳化。但是,在由多个激光对或激光脉冲对构成的系统中,若在“某一”激光对或激光脉冲对使振荡的偏光或相位最佳化,则无法在“其他的”激光对或激光脉冲对使振荡的偏光或相位最佳化。因此,在由多个激光对或激光脉冲对构成的系统中,作为激光或激光脉冲的网络“整体”寻找振荡的偏光或相位的“妥协点”。
但是,当在激光或激光脉冲的网络整体中使振荡的偏光或相位最佳化时,并不是在各个激光对或激光脉冲对中启动单独的振荡模式,而是需要以在激光或激光脉冲的网络整体启动一个振荡模式的方式在各激光间或各激光脉冲间实现同步。
如此,在专利文献1、2及非专利文献1中,对于各激光或各激光脉冲控制泵浦能,启动在激光或激光脉冲的网络整体中使阈值增益变为最低的一个振荡模式,测量各激光或各激光脉冲的振荡的偏光或相位,以及测量各伊辛自旋的方向。故而,能够解决量子退火机及量子绝热机中陷入到准稳定状态的问题及伊辛相互作用的实施速度问题。
而且,在专利文献1、2及非专利文献1中,不仅仅能够自由地控制物理上位置靠近的位点间的伊辛相互作用的大小,还能够自由地控制物理上位置远的位点间的伊辛相互作用的大小。故而,能够与位点间的物理距离无关地解开由NP完全问题等映射的人工伊辛模型。
接下来对专利文献1、2具体地说明。首先,通过控制在两个面发光激光之间交换的光的振幅及相位,实施两个面发光激光之间的模拟伊辛相互作用的大小及符号。接着,各个面发光激光在交换光的过程中达到稳定状态之后,通过测量各个面发光激光的振荡的偏光或相位,测量各个面发光激光的模拟伊辛自旋。
在此,面发光激光的网络整体中,为了启动将振荡的偏光或相位最佳化的一个振荡模式,需要在面发光激光之间实现同步。因此,利用从主激光向面发光激光的注入同步,将面发光激光的振荡频率对准在同一频率。但是,由于面发光激光的自激频率与主激光的振荡频率稍有不同,因此初始状态下的面发光激光的振荡相位向稳定状态下的面发光激光的振荡的0相或π相中的任一相位方向偏转。故而,很有可能产生由于初始状态的相位偏差导致的误答。
而且,当伊辛位点为M个时,面发光激光需要M个,面发光激光间的光路部需要M(M-1)/2个。进而,若不正确地调节面发光激光间的光路部的长度,则不能正确地实施面发光激光间的模拟伊辛相互作用的大小及符号。故而,当伊辛位点变多时,伊辛模型的量子计算装置变得规模大且复杂。
下面,对于非专利文献1具体地说明。首先,通过控制两个激光脉冲间交换的光的振幅及相位,实施2个激光脉冲间的模拟伊辛相互作用的大小及符号。接着,各个激光脉冲在交换光的过程中达到稳定状态之后,通过测量各个激光脉冲的振荡的相位,测量各个激光脉冲的模拟伊辛自旋。
在此,在激光脉冲的网络整体中,为了启动使振荡相位最佳化的一个振荡模式,需要在激光脉冲间实现同步。因此,使用简并光学参量振荡器及环谐振器,将激光脉冲的振荡频率对准在同一频率。而且,不使用基于主激光的注入同步,而使用基于简并光学参量振荡器的向下变换,因此初始状态下的激光脉冲的振荡相位不会向稳定状态下的激光脉冲的振荡的0相或π相中的任一相位方向偏转。故而,由于初始状态的相位偏转导致产生误答的可能性较低。
下面,对实现非专利文献1公开的技术的第一方法进行具体的说明。在此,在从环谐振器分路并向环谐振器合并的、具有与激光脉冲间的间隔相等长度的延迟线上配置用于对激光脉冲间交换的光的振幅及相位进行控制的调制器。而且,先行的激光脉冲的一部分在延迟线传输并由调制器调制,后续的激光脉冲不在延迟线传输,而在环谐振器传输,上述激光脉冲合并,故而,在激光脉冲间交换光。如此,在重复环谐振器中的激光脉冲的环绕传输的过程中,在激光脉冲达到稳定状态之后,测量激光脉冲的相位。
也就是说,当伊辛位点为M个时,延迟线需要(M-1)种,调制器需要(M-1)个。而且,若不能正确地调节具有与激光脉冲间的间隔相等长度的延迟线的长度,就无法正确地实施激光脉冲间的模拟伊辛相互作用的大小及符号。故而,当伊辛位点变多时,即便是第一方法也会使伊辛模型的量子计算装置变得规模大且复杂。
下面,对实现非专利文献1公开的技术的第二方法进行具体的说明。在此,在从环谐振器分路的部位配置用于测量激光脉冲的相位的检波器。而且,配置根据伊辛模型的结合系数及测量的激光脉冲的相位来计算伊辛模型的相互作用的计算机。进而,在向环谐振器合并的部位配置根据计算的伊辛模型的相互作用来控制注入到激光脉冲的光的振幅及相位的调制器。如此,在重复由检波器、计算机及调制器构成的反馈循环的过程中,在激光脉冲达到稳定状态之后,测量激光脉冲的相位。
也就是说,即便伊辛位点为M个时,检波器、计算机及调制器分别仅需要一个。而且,不需要应正确地调节其长度的光路部(专利文献1、2)或延迟线(第一方法)。故而,即便伊辛位点变多,在第二方法中,伊辛模型的量子计算装置变得规模小且简单。
另外,激光脉冲间的模拟伊辛相互作用优选是接近瞬时相互作用,优选不是延迟相互作用。故而,优选在检波器测量全部激光脉冲的相位后至全部激光脉冲绕环谐振器1周,调制器控制注入到全部激光脉冲的光的振幅及相位为止,计算机计算全部激光脉冲相关的伊辛模型的全部相互作用。
但是,计算机计算全部激光脉冲相关的伊辛模型的全部相互作用的时间与伊辛位点数的平方(2体伊辛相互作用的情况)成比例地增加,因此当伊辛位点数变多时,受到计算机时钟或存储器的限制,认为比全部激光脉冲绕环谐振器1周的时间更长。
发明内容
因此,为了解决上述问题,本发明目的在于在重复由伊辛自旋测量步骤、伊辛相互作用计算步骤及伊辛相互作用实施步骤构成的反馈循环的过程中,通过充分地确保用于计算全部激光脉冲相关的伊辛模型的全部相互作用的时间,即便伊辛位点数变多,也能够使系统整体的动作稳定,降低产生误答的可能性。
为达到上述目的,在实效上延长全部激光脉冲绕环谐振器1周的时间。伊辛自旋测量步骤在结束全部伊辛自旋一组的测量后至再次开始全部伊辛自旋一组的测量为止,中断测量。在伊辛自旋测量步骤结束全部伊辛自旋一组的测量之后至再次开始全部伊辛自旋一组的测量之间,伊辛相互作用计算步骤根据最近的伊辛自旋的测量,能够带有充分时间余量地计算全部伊辛自旋相关的全部伊辛相互作用。
具体来说,本发明提供一种伊辛模型的量子计算装置,其包括:简并光学参量振荡器,使多个模拟自旋脉冲进行简并光学参量振荡,所述多个模拟自旋脉冲与伊辛模型的多个自旋模拟对应且具有相同的振荡频率;环谐振器,使所述多个模拟自旋脉冲环绕传输;暂时自旋测量部,每当所述多个模拟自旋脉冲在所述环谐振器中环绕传输时,通过暂时地测量所述多个模拟自旋脉冲的相位,暂时地测量所述多个模拟自旋脉冲的模拟自旋时,在结束一组的测量之后至再次开始一组的测量为止中断测量;相互作用计算部,在所述暂时自旋测量部结束一组的测量之后至再次开始一组的测量为止,根据所述伊辛模型的结合系数及所述暂时自旋测量部最近测量的所述多个模拟自旋脉冲的模拟自旋,暂时地计算所述多个模拟自旋脉冲相关的全部相互作用;相互作用实施部,在所述相互作用计算部结束所述多个模拟自旋脉冲相关的全部相互作用的暂时计算之后,通过控制对所述多个模拟自旋脉冲注入的光的振幅及相位,暂时地实施所述相互作用计算部最近计算的所述多个模拟自旋脉冲相关的全部相互作用的大小及符号;模拟自旋测量部,在重复由所述暂时自旋测量部、所述相互作用计算部及所述相互作用实施部构成的反馈循环的过程中,在所述多个模拟自旋脉冲达到稳定状态之后,通过测量所述多个模拟自旋脉冲的相位,测量所述多个模拟自旋脉冲的模拟自旋。
根据该结构,通过在实效上延长全部激光脉冲绕环谐振器1周的时间,伊辛相互作用计算步骤能够根据最近的伊辛自旋的测量,带有充分时间余量地计算全部伊辛自旋相关的全部伊辛相互作用。
此外,本发明的伊辛模型的量子计算装置中,所述环谐振器使与所述伊辛模型的所述多个自旋模拟对应的连续的所述多个模拟自旋脉冲环绕传输,在所述暂时自旋测量部结束一组的测量之后至再次开始一组的测量为止,在所述环谐振器中环绕传输的所述多个模拟自旋脉冲分别通过一次以上从所述环谐振器向所述暂时自旋测量部的分路部位。
根据该结构,多个模拟自旋脉冲分别通过一次以上从环谐振器向暂时自旋测量部的分路部位的期间,伊辛相互作用计算步骤能够根据最近的伊辛自旋的测量,带有充分时间余量地计算全部伊辛自旋相关的全部伊辛相互作用。
此外,本发明的伊辛模型的量子计算装置中,所述环谐振器使与所述伊辛模型的所述多个自旋模拟对应的连续的所述多个模拟自旋脉冲和不与所述伊辛模型的所述多个自旋对应的连续的多个虚脉冲环绕传输,在所述暂时自旋测量部结束一组的测量至再次开始一组的测量为止,在所述环谐振器中环绕传输的所述多个虚脉冲分别通过一次从所述环谐振器向所述暂时自旋测量部的分路部位。
根据该结构,多个虚脉冲分别通过一次从环谐振器向暂时自旋测量部的分路部位的期间,伊辛相互作用计算步骤能够根据最近的伊辛自旋的测量,带有充分时间余量地计算全部伊辛自旋相关的全部伊辛相互作用。
此外,本发明的伊辛模型的量子计算装置中,所述简并光学参量振荡器将所述多个虚脉冲的振荡相位及振荡强度分别控制为预定相位及预定强度,所述伊辛模型的量子计算装置将所述多个虚脉冲用作参照信号,执行自身装置的相位特性的校准。
根据该结构,不是将具有不知道最优解的振荡相位及在计算过程中随时间发生变化的振荡强度的多个模拟自旋脉冲用作参照信号,而是将具有预定的振荡相位及预定的振荡强度的多个虚脉冲用作参照信号,能够执行伊辛模型的量子计算装置的相位特性的校准。
此外,本发明的伊辛模型的量子计算装置中,还包括环谐振长控制部,控制所述环谐振器的谐振长,以使所述多个虚脉冲的振荡强度最大化为所述预定强度。
根据该结构,即便在根据伊辛模型的量子计算装置的设置环境(例如,温度等)随时间发生变动,环谐振器的谐振长也随时间发生变动时,能够将环谐振器的谐振长稳定在恒定值。故而,每当多个模拟自旋脉冲在环谐振器环绕传输多次或单次时,能够使简并光学参量振荡器中的相位感应放大器的放大强度、暂时自旋测量部中的与局部振荡光的干渉时刻、及相互作用实施部中的与注入脉冲的干渉时刻稳定化。而且,能够正确地执行简并光学参量振荡器中的相位感应放大器的脉冲稳定化、暂时自旋测量部中的脉冲相位测量、及相互作用实施部中的相互作用实施,进而能够大幅提高伊辛模型的量子计算装置的计算精度。
此外,本发明的伊辛模型的量子计算装置中,还包括局部振荡光控制部,控制所述多个模拟自旋脉冲与所述暂时自旋测量部在所述多个模拟自旋脉冲的相位测量中使用的局部振荡光之间的干渉时刻,以使所述多个虚脉冲与所述暂时自旋测量部在所述多个模拟自旋脉冲的相位测量中使用的局部振荡光之间的干渉结果成为根据所述多个虚脉冲的预定振荡相位推断的预定干渉结果。
根据该结构,每当多个模拟自旋脉冲在环谐振器中环绕传输多次或单次时,能够使与暂时自旋测量部中的局部振荡光的干渉时刻稳定化。故而,能够正确地执行暂时自旋测量部中的脉冲相位测量,进而能够大幅提高伊辛模型的量子计算装置的计算精度。
此外,本发明的伊辛模型的量子计算装置中,还包括注入脉冲控制部,控制所述多个模拟自旋脉冲与所述相互作用实施部向所述多个模拟自旋脉冲的光注入中使用的具有考虑了相互作用的振荡相位的多个自旋注入脉冲之间的干渉时刻,以使所述多个虚脉冲与所述相互作用实施部向所述多个虚脉冲的光注入中使用的具有预定振荡相位的多个虚注入脉冲之间的干渉结果成为根据所述多个虚脉冲的预定振荡相位推断的预定干渉结果。
根据该结构,每当多个模拟自旋脉冲在环谐振器中环绕传输多次或单次时,能够使与相互作用实施部中的注入脉冲的干渉时刻稳定化。故而,能够正确地执行相互作用实施部中的相互作用实施,进而能够大幅提高伊辛模型的量子计算装置的计算精度。
此外,本发明的伊辛模型的量子计算装置中,所述暂时自旋测量部结束一组的测量后至再次开始一组的测量为止的期间越长,所述相互作用实施部将对所述多个模拟自旋脉冲注入的光的振幅控制得越大。
当中断自旋的测量及相互作用的实施时,与不中断自旋的测量及相互作用的实施时相比,对于激光脉冲的注入强度实效上变小。根据该结构,自旋的测量及相互作用的实施的中断期间越长,越加大对于激光脉冲的注入强度,由此即便中断自旋的测量及相互作用的实施时,也能够与不中断自旋的测量及相互作用的实施时同样地维持对于激光脉冲的注入强度及泵浦增益的平衡。
此外,本发明的伊辛模型的量子计算装置中,所述暂时自旋测量部结束一组的测量后至再次开始一组的测量为止的期间越长,所述简并光学参量振荡器将所述多个模拟自旋脉冲的简并光学参量振荡的泵浦速率控制得越小。
当中断自旋的测量及相互作用的实施时,与不中断自旋的测量及相互作用的实施时相比,对于激光脉冲的注入强度在实效上变小。根据该结构,自旋的测量及相互作用的实施的中断期间越长,越减小对于激光脉冲的泵浦增益,由此即便中断自旋的测量及相互作用的实施时,也能够与不中断自旋的测量及相互作用的实施时同样地维持对于激光脉冲的注入强度及泵浦增益的平衡。
此外,本发明的伊辛模型的量子计算装置中,所述伊辛模型的图平均次数越高,所述相互作用实施部将对所述多个模拟自旋脉冲注入的光的振幅控制得越小。
根据该结构,通过减小对于图次数高的激光脉冲的注入强度,能够防止图次数高的伊辛自旋在σ=±1间振动,因此系统整体动作不会变得不稳定,能够降低产生误答的可能性。
如以上说明,根据本发明,在重复由伊辛自旋测量步骤、伊辛相互作用计算步骤及伊辛相互作用实施步骤构成的反馈循环的过程中,通过充分地确保用于计算全部激光脉冲相关的伊辛模型的全部相互作用的时间,即便伊辛位点数变多,也能够使系统整体的动作稳定,并降低产生误答的可能性。
附图说明
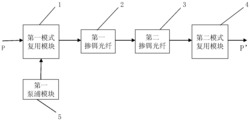
图1是表示本发明的伊辛模型的量子计算装置的结构的图。
图2是表示本发明的伊辛模型的量子计算方法的第一顺序的图。
图3是表示本发明的伊辛模型的量子计算方法的第二顺序的图。
图4是表示本发明的伊辛模型的量子计算方法的第三顺序的图。
图5是表示本发明的伊辛模型的量子计算装置的相位特性稳定化的图。
图6是表示在第二顺序中对结合系数ξ在反馈延迟L周未进行补偿情况下的随机图的量子计算的时间发展图。
图7是表示在第二顺序中对结合系数ξ在反馈延迟L周进行补偿情况下的随机图的量子计算的时间发展图。
图8是表示在第二顺序中对结合系数ξ在反馈延迟L周未进行补偿情况及进行补偿情况下的随机图的量子计算的计算结果图。
图9是表示在第二顺序中对结合系数ξ在反馈延迟L周未进行补偿情况下的无标度图的量子计算的时间发展图。
图10是表示在第二顺序中对结合系数ξ在反馈延迟L周进行补偿情况下的无标度图的量子计算的时间发展图。
图11是表示在第二顺序中对结合系数ξ在反馈延迟L周未进行补偿情况及进行补偿情况下的无标度图的量子计算的计算结果的图。
图12是表示在第二顺序中对结合系数ξ在反馈延迟L周未进行补偿情况下的完全图的量子计算的时间发展图。
图13是表示在第二顺序中对结合系数ξ在反馈延迟L周进行补偿情况下的完全图的量子计算的时间发展图。
图14是表示在第二顺序中对结合系数ξ在反馈延迟L周未进行补偿情况及进行补偿情况下的完全图的量子计算的计算结果图。
图15是表示在第二顺序中对泵浦速率p在反馈延迟L周进行补偿情况下的随机图的量子计算的计算结果图。
图16是表示在第二顺序中对泵浦速率p在反馈延迟L周进行补偿情况下的无标度图的量子计算的计算结果图。
图17是表示在第二顺序中对泵浦速率p在反馈延迟L周进行补偿情况下的完全图的量子计算的计算结果图。
图18是表示在第二顺序中结合系数ξ及泵浦速率p可变情况下的随机图的量子计算的计算结果图。
图19是表示在第二顺序中结合系数ξ及泵浦速率p可变情况下的无标度图的量子计算的计算结果图。
具体实施方式
参照附图对本发明的实施方式进行说明。以下说明的实施方式为本发明公开的实施例,本发明并不限于下面的实施方式。
(本发明的伊辛模型的量子计算装置的结构及原理)
本发明的伊辛模型的量子计算装置Q的结构如图1所示。在本发明中,伊辛哈密顿函数(Ising Hamiltonian)包括1体~3体的相互作用如数式1所示。
[数1]
简并光学参量振荡器1使与伊辛模型的多个自旋σ1~σ4模拟对应且具有相同振荡频率的多个模拟自旋脉冲SP1~SP4发生简并光学参量振荡。环谐振器2使多个模拟自旋脉冲SP1~SP4环绕传输。多个模拟自旋脉冲SP1~SP4以SP1、SP2、SP3、SP4、SP1、SP2、SP3、SP4、···的顺序进入后述的反馈循环。
暂时自旋测量部3每当多个模拟自旋脉冲SP1~SP4在环谐振器2中环绕传输时,暂时性地测量多个模拟自旋脉冲SP1~SP4的相位,由此暂时测量多个模拟自旋脉冲SP1~SP4的模拟的自旋σ1~σ4。具体来说,暂时自旋测量部3使用局部振荡脉冲LO,对于多个模拟自旋脉冲SP1~SP4进行零差检波。
相互作用计算部4根据与某一模拟自旋脉冲SPi相关的伊辛模型的结合系数λi、Jij、Kijk及暂时自旋测量部3暂时测量的其他模拟自旋脉冲SPj、SPk的模拟自旋σj、σk,来暂时计算与某一模拟自旋脉冲SPi相关的相互作用(相对于σi的比例系数-λi-ΣJijσj-ΣKijkσjσk)。图1中表示i、j、k=1~4的情况。
在此,NP完全问题等映射到伊辛模型之后,相互作用计算部4输入伊辛模型的结合系数λi、Jij、Kijk。
相互作用实施部5通过控制对某一模拟自旋脉冲SPi注入的光的振幅及相位,来暂时实施由相互作用计算部4暂时计算的与某一模拟自旋脉冲SPi相关的相互作用(对于σi的比例系数-λi-ΣJijσj-ΣKijkσjσk)的大小及符号。具体来说,相互作用实施部5使用局部振荡脉冲LO对某一模拟自旋脉冲SPi生成注入光脉冲。
模拟自旋测量部6在由暂时自旋测量部3、相互作用计算部4及相互作用实施部5构成的反馈循环重复的过程中,在多个模拟自旋脉冲SP1~SP4达到稳定状态之后,测量多个模拟自旋脉冲SP1~SP4的相位,由此测量多个模拟自旋脉冲SP1~SP4的模拟自旋σ1~σ4。具体来说,模拟自旋测量部6使用局部振荡脉冲LO对多个模拟自旋脉冲SP1~SP4进行零差检波。
在此,模拟自旋测量部6输出伊辛模型的自旋σ1~σ4之后,伊辛模型被解映射为NP完全问题等。
如此,利用简并光学参量振荡器1控制泵浦能,启动在多个模拟自旋脉冲SP1~SP4的网络整体中阈值增益变为最低的一个振荡模式,测量多个模拟自旋脉冲SP1~SP4的振荡相位,并测量与多个模拟自旋脉冲SP1~SP4对应的各伊辛自旋的方向。
在图1的说明中,在暂时自旋测量步骤和相互作用实施步骤之间未加入简并光学参量放大步骤。在该情况下,几乎不产生时滞,因此能够实施伊辛模型位点间几乎没有延迟的相互作用。
作为变形例,也可在暂时自旋测量步骤与相互作用实施步骤之间加入简并光学参量放大步骤。在该情况下,产生某种程度的时滞,但能够实施伊辛模型位点间实质上没有延迟的相互作用。
对图1中的计算内容详述。局部振荡脉冲LO的振荡相位0从初始状态至稳定状态未发生变化。各模拟自旋脉冲SP的振荡相位φ(t)在初始状态下随机取0及π中的任一个(各模拟自旋脉冲SP在简并光学参量振荡器1的作用下被简并光学参量振荡,处于挤压状态),在稳定状态下,根据伊辛相互作用,取0及π中的任一个。稳定状态下的φ(稳定)=0、π分别对应σ=+1、-1。
关于各模拟自旋脉冲SP,当1体的相互作用的结合系数λi为正时,该模拟自旋脉冲SP的模拟自旋σ为+1在能量上有利。故而,相互作用实施部5使该模拟自旋脉冲SP的振荡相位φ(稳定)为0的振荡模式易于启动。
关于各模拟自旋脉冲SP,当1体的相互作用的结合系数λi为负时,该模拟自旋脉冲SP的模拟自旋σ为-1在能量上有利。故而,相互作用实施部5使该模拟自旋脉冲SP的振荡相位φ(稳定)为π的振荡模式易于启动。
关于两个模拟自旋脉冲SP,当2体的相互作用的结合系数Jij为正时,两个模拟自旋脉冲SP的模拟自旋σ为同号在能量上有利。故而,相互作用实施部5使两个模拟自旋脉冲SP的振荡相位φ(稳定)为同相的振荡模式易于启动。
关于两个模拟自旋脉冲SP,当2体的相互作用的结合系数Jij为负时,两个模拟自旋脉冲SP的模拟自旋σ为异号在能量上有利。故而,相互作用实施部5使两个模拟自旋脉冲SP的振荡相位φ(稳定)为反相的振荡模式易于启动。
关于三个模拟自旋脉冲SP,当3体的相互作用的结合系数Kijk为正时,(1)三个模拟自旋脉冲SP的模拟自旋σ为+1,或(2)两个模拟自旋脉冲SP的模拟自旋σ为-1,一个模拟自旋脉冲SP的模拟自旋σ为+1在能量上有利。故而,相互作用实施部5使(1)三个模拟自旋脉冲SP的振荡相位φ(稳定)为0的振荡模式,或(2)两个模拟自旋脉冲SP的振荡相位φ(稳定)为π,一个模拟自旋脉冲SP的振荡相位φ(稳定)为0的振荡模式易于启动。
关于三个模拟自旋脉冲SP,当3体的相互作用的结合系数Kijk为负时,(1)三个模拟自旋脉冲SP的模拟自旋σ为-1,或(2)两个模拟自旋脉冲SP的模拟自旋σ为+1,且一个模拟自旋脉冲SP的模拟自旋σ为-1在能量上有利。故而,相互作用实施部5使(1)三个模拟自旋脉冲SP的振荡相位φ(稳定)为π的振荡模式,或(2)两个模拟自旋脉冲SP的振荡相位φ(稳定)为0,且一个模拟自旋脉冲SP的振荡相位φ(稳定)为π的振荡模式易于启动。
尤其是,在伊辛模型的量子计算装置Q整体中,作为一体启动一个振荡模式,且在各模拟自旋脉冲SP中,上述振荡模式既有实际启动的时候,也有并未启动的时候。
对于图1中的计算原理详述。在各模拟自旋脉冲SP1、SP2、SP3、SP4中,关于I成分强度ci及Q成分强度si,速率方程式对应范德波尔方程式,如数式2、3所示。
[数2]
[数3]
t是无量纲时间,且t=γSτ/2。τ为实时间。γS为信号光的谐振器内衰减率。ci及si分别为规格化后的I成分及Q成分的强度,ci=Ci/As及si=Si/As。Ci及Si分别为规格化前的I成分及Q成分的强度。规格化因子As是p(后述的规格化后的泵浦速率(Pump rate))=2的信号光的强度,As=√(γSγp/2κ
数式2的-ci及数式3的-si是关于谐振器内损失的项。数式2的+pci及数式3的-psi是关于线性增益的项。数式2的-(ci
数式2、3的ζi涉及的项是关于1体的相互作用的项,且是相对于范德波尔方程式的由光注入引起的摄动项。对相互作用实施部5针对模拟自旋脉冲SPi生成用于实施1体的相互作用(与针对σi的比例系数-λi同号且成比例的-ζi)的注入光脉冲的方法进行说明。
相互作用计算部4计算1体的相互作用(与针对σi的比例系数-λi成比例的-ζi)。当ζi为正时,相互作用实施部5对于局部振荡脉冲LO(振荡相位0)进行使振荡相位维持原样的相位调制,并进行与|ζi|成比例的振幅调制,生成注入光脉冲。当ζi为负时,相互作用实施部5对于局部振荡脉冲LO(振荡相位0)进行使振荡相位延迟π的相位调制,并进行与|ζi|成比例的振幅调制,生成注入光脉冲。
数式2、3的ξij涉及的项是关于2体的相互作用的项,且是相对于范德波尔方程式的由光注入引起的摄动项。对相互作用实施部5针对模拟自旋脉冲SPi生成用于实施2体的相互作用(与针对σi的比例系数-ΣJijσj同号且成比例的-Σξijσj)的注入光脉冲的方法进行说明。
暂时自旋测量部3在本环绕前测量模拟自旋脉冲SPj的振荡相位φj(t)及模拟自旋σj。相互作用计算部4计算2体的相互作用(与针对σi的比例系数-ΣJijσj成比例的-Σξijσj)。关于第i、j号的位点间,当ξij为正时,相互作用实施部5对于局部振荡脉冲LO(振荡相位0)进行将振荡相位移动到φj(t)但不实施进一步反相化的相位调制,并进行与|ξij|成比例的振幅调制,生成注入光脉冲。关于第i、j号的位点间,当ξij为负时,相互作用实施部5对于局部振荡脉冲LO(振荡相位0)进行将振荡相位移动到φj(t)并实施进一步反相化的相位调制,并进行与|ξij|成比例的振幅调制,生成注入光脉冲。相互作用实施部5对于第i、j号位点间的全部组合如上述那样生成注入光脉冲。
数式2、3的χijk涉及的项是关于3体的相互作用的项,且是相对于范德波尔方程式的由光注入引起的摄动项。对相互作用实施部5针对模拟自旋脉冲SPi生成用于实施3体的相互作用(与针对σi的比例系数-ΣKijkσjσk同号且成比例的-Σχijkσjσk)的注入光脉冲的方法进行说明。
暂时自旋测量部3在本环绕前测量模拟自旋脉冲SPj、SPk的振荡相位φj(t)、φk(t)及模拟自旋σj、σk。相互作用计算部4计算3体的相互作用(与针对σi的比例系数-ΣKijkσjσk成比例的-Σχijkσjσk)。关于第i、j、k号位点间,当χijk为正时,相互作用实施部5对于局部振荡脉冲LO(振荡相位0)进行将振荡相位移动到后述的φjk(t)但不实施进一步反相化的相位调制,并进行与|χijk|成比例的振幅调制,生成注入光脉冲。关于第i、j、k号位点间,当χijk为负时,相互作用实施部5对于局部振荡脉冲LO(振荡相位0)进行将振荡相位移动到后述的φjk(t)并实施进一步反相化的相位调制,并进行与|χijk|成比例的振幅调制,生成注入光脉冲。相互作用实施部5对于第i、j、k号位点间的全部组合如上述那样生成注入光脉冲。
在此,对于φjk(t)满足σjσk=cosφjk(t)时,φjk(t)需要如此定义的理由进行说明。也就是说,对于模拟自旋脉冲SPi来说,为了实施2体的相互作用(与相对σi的比例系数-ΣJijσj成比例的-Σξijσj),仅将模拟自旋脉冲SPi、SPj线性重合即可。但是,对于模拟自旋脉冲SPi,为了实施3体的相互作用(与针对σi的比例系数-ΣKijkσjσk成比例的-Σχijkσjσk),仅将模拟自旋脉冲SPi、SPj、SPk线性重合就不够了。
但是,若利用模拟自旋脉冲SPi、SPj、SPk间的非线性效应,则伊辛模型的量子计算装置Q的回路结构变得复杂。因此,若设σjσk=cosφjk(t),则能够利用模拟自旋脉冲SPi及注入光脉冲之间的线性重合,伊辛模型的量子计算装置Q的回路结构变得简单。
进而,在各模拟自旋脉冲SPi及各注入光脉冲的线性重合的范围内,能够实施伊辛模型的4体以上的相互作用。也就是说,当实施伊辛模型的4体以上的相互作用时,与上述同样设σjσkσl···=cosφjkl···(t)(对于N体的相互作用,左边是(N-1)个σ的积),进行模拟自旋脉冲SPi及注入光脉冲的线性重合。
在稳定状态下,数式2、3分别变为数式4、5。
[数4]
[数5]
数式2的p-(ci
[数6]
在此,数式6的最右边的第1项表示将数式4的左边的第3~5项设为摄动项时的摄动的0次的相关项。而且,数式6的最右边的第2~4项表示将数式4的左边的第3~5项设为摄动项时的摄动的1次的相关项。进而,使用σi=sgn(ci)~sgn(ci
在此,当激光的媒介是均匀的媒介时,作为激光系统整体,选择实现最小光子衰减率Γ的振荡相位状态{σi}。也就是说,作为激光系统整体,选择一个特定的振荡模式。而且,由于振荡模式间的竞争,导致一个特定的振荡模式抑制其他振荡模式。也就是说,作为激光系统整体,使数式6的Γ最小化。另一方面,作为激光系统整体,数式6的M为恒定。故而,作为激光系统整体,使数式6的-Σζiσi-Σξijσiσj-Σχijkσiσjσk最小化。也就是说,实现了使数式1的伊辛哈密顿函数最小化的基底状态。
(本发明的伊辛模型的量子计算方法的延迟反馈)
图2表示本发明的伊辛模型的量子计算方法的第一顺序。在第一顺序中,由于伊辛位点数为1000个,因此环绕传输1000个模拟自旋脉冲SPi。而且,每当模拟自旋脉冲1组{SPi}环绕一次时,执行暂时自旋测量步骤及相互作用实施步骤。
在此,模拟自旋脉冲SPi间的模拟伊辛相互作用优选接近瞬时相互作用,且优选不是延迟相互作用。故而,暂时自旋测量部3测量全部模拟自旋脉冲SPi的相位之后,至全部模拟自旋脉冲SPi绕环谐振器2一周,相互作用实施部5控制向全部模拟自旋脉冲SPi注入的光的振幅及相位为止,相互作用计算部4计算全部模拟自旋脉冲SPi相关的伊辛模型的全部相互作用。
但是,相互作用计算部4计算全部模拟自旋脉冲SPi相关的伊辛模型的全部相互作用的时间,与伊辛位点数的平方(2体伊辛相互作用的情况)成比例地增加,因此当伊辛位点数变多时,由于受到相互作用计算部4(例如FPGA)的时钟或存储器的限制,而被认为变得比全部模拟自旋脉冲SPi绕环谐振器2一周的时间更长。
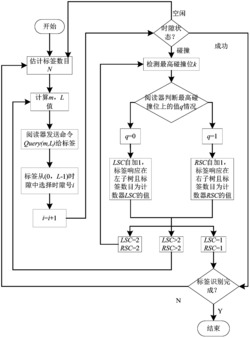
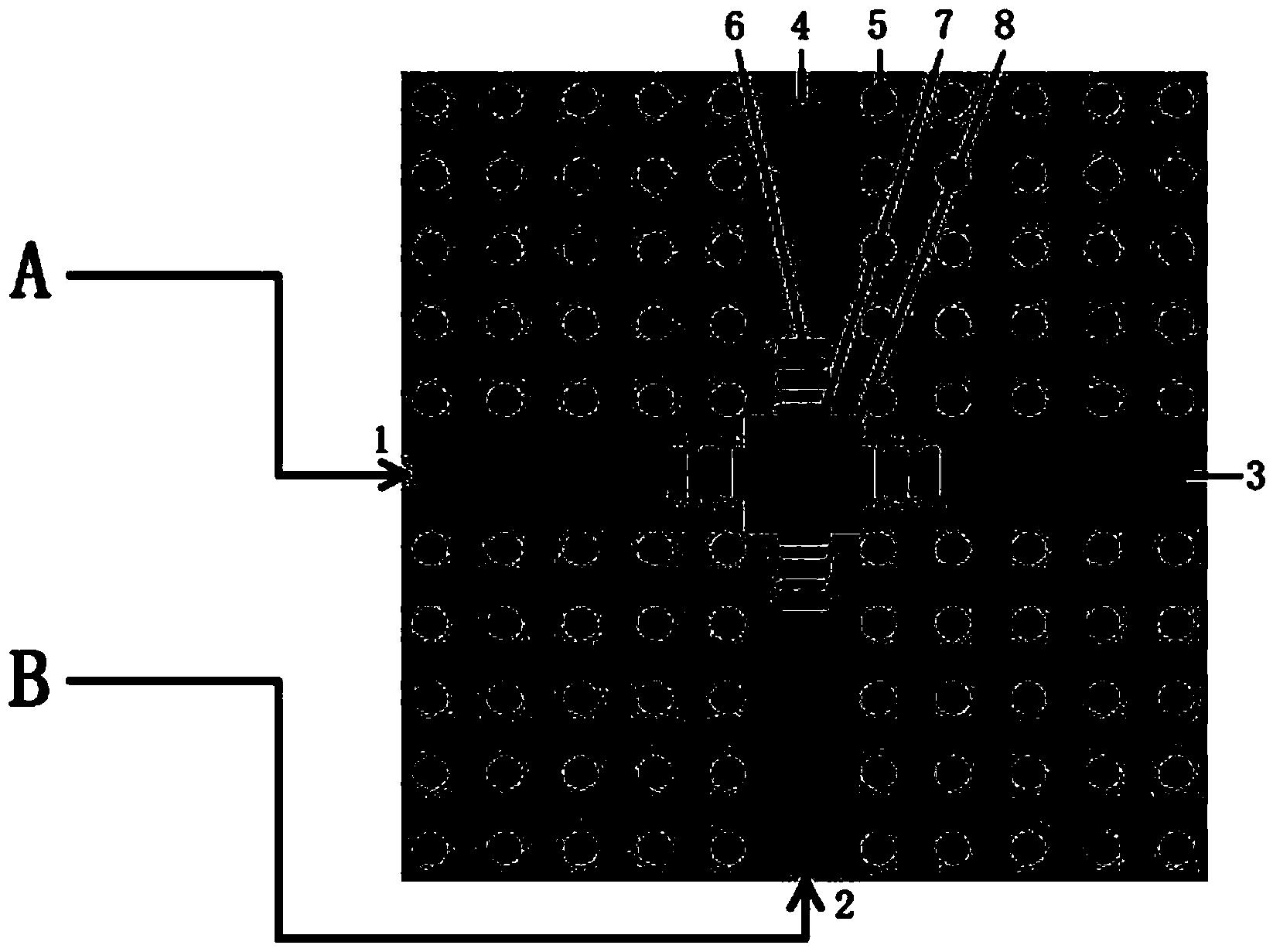
本发明的伊辛模型的量子计算方法的第二顺序如图3所示。在第二顺序中,由于伊辛位点数为1000个,因此环绕传输1000个模拟自旋脉冲SPi。而且,为了充分确保用于计算全部模拟自旋脉冲SPi相关的伊辛模型的全部相互作用的时间,在实效上延长全部模拟自旋脉冲SPi绕环谐振器2一周的时间。也就是说,暂时自旋测量部3测量全部模拟自旋脉冲SPi的相位后,至全部模拟自旋脉冲SPi绕环谐振器2L周,相互作用实施部5控制向全部模拟自旋脉冲SPi注入的光的振幅及相位为止,相互作用计算部4计算全部模拟自旋脉冲SPi相关的伊辛模型的全部相互作用,使相互作用计算具有充分的时间余量。
具体来说,暂时自旋测量部3在结束模拟自旋脉冲1组{SPi}的测量后,至再次开始模拟自旋脉冲1组{SPi}的测量为止,中断测量。在此,暂时自旋测量部3在结束模拟自旋脉冲1组{SPi}的测量后,至再次开始模拟自旋脉冲1组{SPi}的测量为止,在环谐振器2中环绕输送的多个模拟自旋脉冲SPi分别通过L次从环谐振器2向暂时自旋测量部3的分路部位。而且,在环谐振器2中环绕输送的多个模拟自旋脉冲SPi分别通过L次从环谐振器2向暂时自旋测量部3的分路部位的期间,仅受到由简并光学参量振荡器1引起的增益及由于向反馈循环的输出而引起的损失。
而且,相互作用计算部4在暂时自旋测量部3结束模拟自旋脉冲1组{SPi}的测量后至再次开始模拟自旋脉冲1组{SPi}的测量为止,根据最近的自旋测量,计算全部模拟自旋脉冲SPi相关的全部相互作用。进而,相互作用实施部5在相互作用计算部4结束全部模拟自旋脉冲SPi相关的全部相互作用的计算之后,根据最近的相互作用的计算来控制对全部模拟自旋脉冲SPi注入的光的振幅及相位。
如此,在实效上延长全部模拟自旋脉冲SPi绕环谐振器2一周的时间,由此相互作用计算部4根据最近的自旋测量,能够带有充分时间余量地计算全部模拟自旋脉冲SPi相关的全部相互作用。具体来说,在多个模拟自旋脉冲SPi分别通过L次从环谐振器2向暂时自旋测量部3的分路部位的期间,相互作用计算部4根据最近的自旋测量,能够带有充分时间余量地计算全部模拟自旋脉冲SPi相关的全部相互作用。
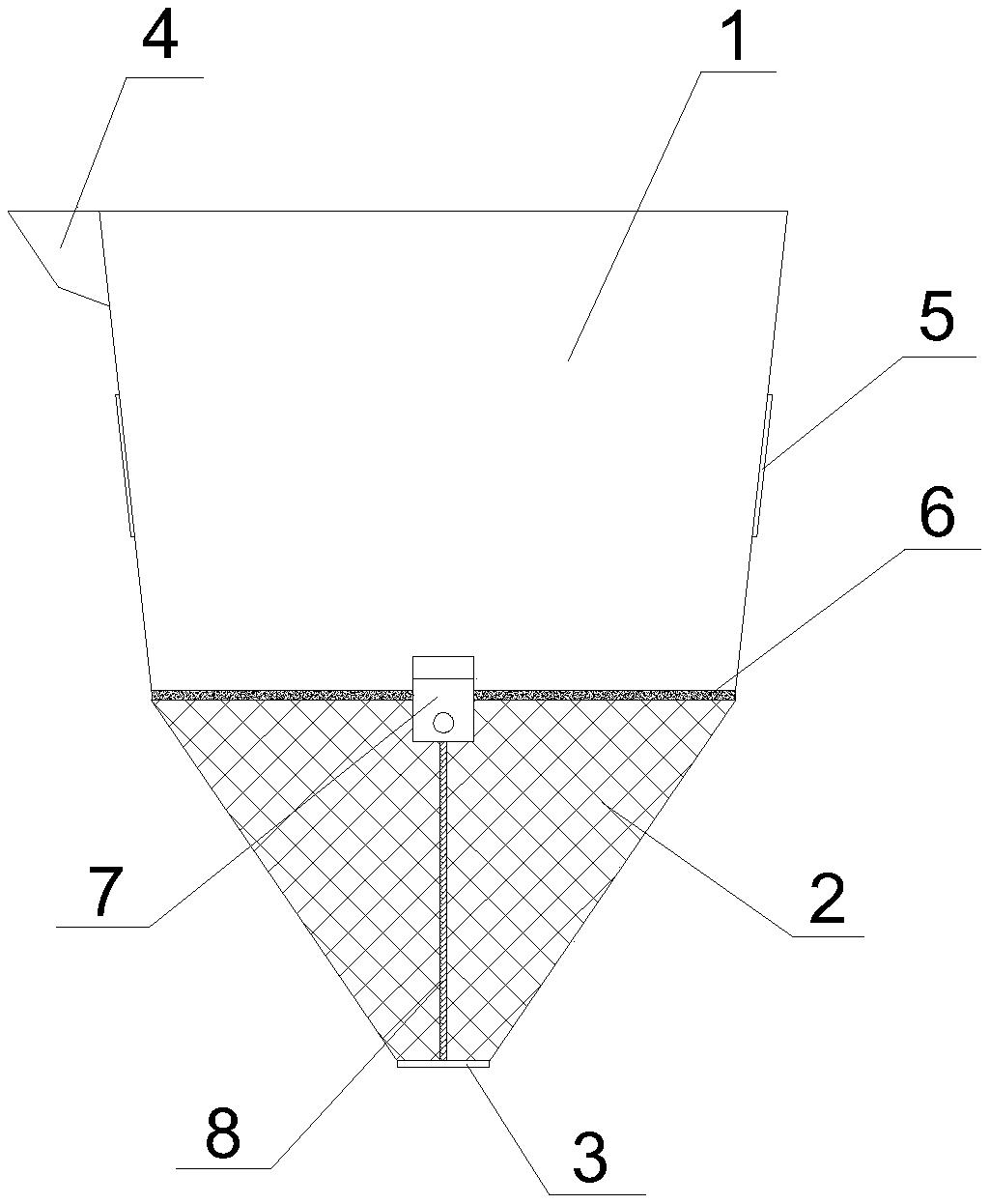
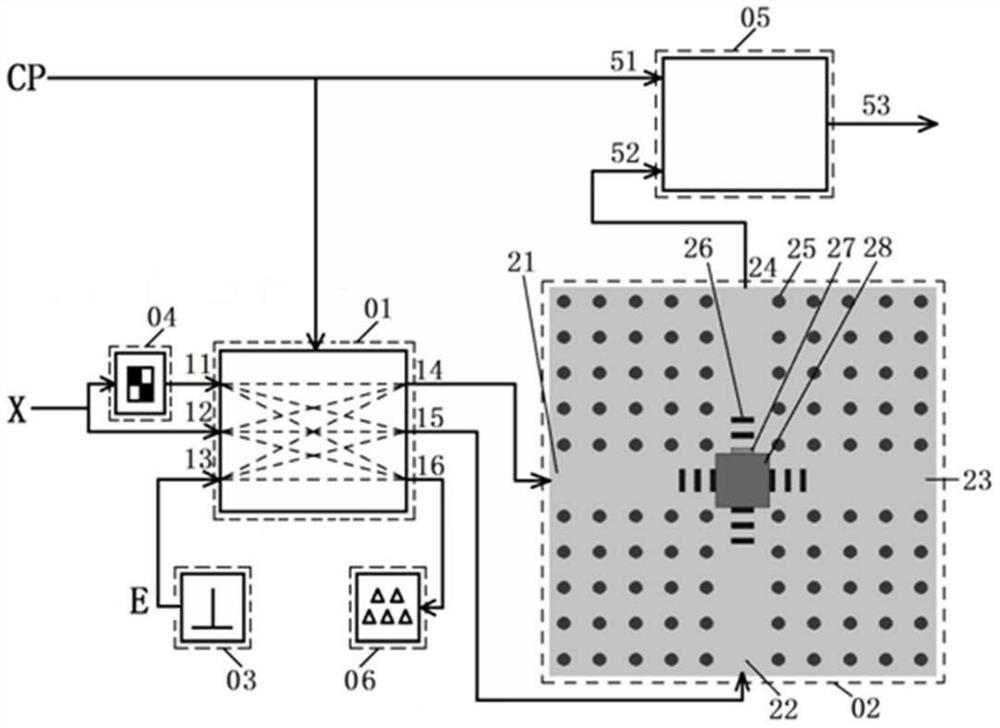
本发明的伊辛模型的量子计算方法的第三顺序如图4所示。在第三顺序中,由于伊辛位点数为1000个,因此环绕输送1000个模拟自旋脉冲SPi,且环绕输送与伊辛位点数不对应的1000个虚脉冲。而且,为了充分确保用于计算全部模拟自旋脉冲SPi相关的伊辛模型的全部相互作用的时间,在实效上延长全部模拟自旋脉冲SPi绕环谐振器2一周的时间。也就是说,暂时自旋测量部3测量全部模拟自旋脉冲SPi的相位后,至全部虚脉冲经过暂时自旋测量部3一次,相互作用实施部5控制注入到全部模拟自旋脉冲SPi的光的振幅及相位为止,相互作用计算部4计算全部模拟自旋脉冲SPi相关的伊辛模型的全部相互作用,并使相互作用计算具有充分的时间余量。
具体来说,暂时自旋测量部3在结束模拟自旋脉冲1组{SPi}的测量后,至再次开始模拟自旋脉冲1组{SPi}的测量为止,中断测量。在此,暂时自旋测量部3结束模拟自旋脉冲1组{SPi}的测量后至再次开始模拟自旋脉冲1组{SPi}的测量为止,在环谐振器2中环绕输送的多个虚脉冲分别通过一次从环谐振器2向暂时自旋测量部3的分路部位。而且,在环谐振器2中环绕输送的多个虚脉冲分别通过一次从环谐振器2向暂时自旋测量部3的分路部位的期间,仅受到由简并光学参量振荡器1引起的增益及由于向反馈循环的输出而引起的损失。
而且,相互作用计算部4在暂时自旋测量部3结束模拟自旋脉冲1组{SPi}的测量后至再次开始模拟自旋脉冲1组{SPi}的测量为止,根据最近的自旋测量,计算全部模拟自旋脉冲SPi相关的全部相互作用。而且,相互作用实施部5在相互作用计算部4结束全部模拟自旋脉冲SPi相关的全部相互作用的计算之后,根据最近的相互作用的计算,控制对全部模拟自旋脉冲SPi注入的光的振幅及相位。
如此,在实效上延长全部模拟自旋脉冲SPi绕环谐振器2一周的时间,由此相互作用计算部4根据最近的自旋测量,能够带有充分时间余量地计算全部模拟自旋脉冲SPi相关的全部相互作用。具体来说,在多个虚脉冲分别通过一次从环谐振器2向暂时自旋测量部3的分路部位的期间,相互作用计算部4根据最近的自旋测量,能够带有充分时间余量地计算全部模拟自旋脉冲SPi相关的全部相互作用。
另外,虚脉冲不用于量子计算,需要长的环谐振器2或窄的脉冲间隔,但能够用于环绕的开头指示或谐振器的稳定化等其他用途。本发明的伊辛模型的量子计算装置的相位特性稳定化如图5所示。
根据伊辛模型的量子计算装置Q的设置环境(例如温度等)随时间变动,有时环谐振器2的谐振长随时间变动。故而,若不能将环谐振器2的谐振长稳定化为恒定值,则每当多个模拟自旋脉冲在环谐振器2中环绕输送多次或单次时,就不能够使简并光学参量振荡器1中的相位感应放大器10中的放大强度、与暂时自旋测量部3中的局部振荡光干渉的干涉时刻、及与相互作用实施部5中的注入脉冲干涉的干渉时刻稳定化。而且,不能够正确地执行简并光学参量振荡器1中的相位感应放大器10中的脉冲稳定化、暂时自旋测量部3中的脉冲相位测量、及相互作用实施部5中的相互作用实施,以至无法大幅提高伊辛模型的量子计算装置Q的计算精度。
在此,如图5所示,执行伊辛模型量子计算装置Q的相位特性的校准。在此,作为用于相位特性校准的参照信号,使用具有不知道最优解的振荡相位及在计算过程中随时间变化的振荡强度的多个模拟自旋脉冲在实施上困难。但是,作为用于相位特性校准的参照信号,使用具有预定的振荡相位及预定的振荡强度的多个虚脉冲在实施上简便。
具体来说,简并光学参量振荡器1将多个虚脉冲的振荡相位及振荡强度分别控制在预定的相位及预定的强度。而且,伊辛模型的量子计算装置Q使用多个虚脉冲作为参照信号,并执行自身装置Q的相位特性校准。为此,伊辛模型的量子计算装置Q除了图1所示的结构外,作为图5所示的结构还包括环谐振长控制部7、局部振荡光控制部8及注入脉冲控制部9。
环谐振长控制部7包括光测量部71、反馈控制部72及相位控制部73。多个虚脉冲及多个模拟自旋脉冲经由环谐振器2上的相位测量地点及向局部振荡光控制部8的分波地点,输入到环谐振长控制部7。在此,若环谐振器2的谐振长不随时间发生变动,则简并光学参量振荡器1中的相位感应放大器10的放大强度被稳定化,因此多个虚脉冲的振荡强度被最大化为预定的强度。但是,若环谐振器2的谐振长随时间发生变动,则简并光学参量振荡器1中的相位感应放大器10的放大强度未被稳定化,因此多个虚脉冲的振荡强度未被最大化为预定的强度。
光测量部71测量多个虚脉冲的振荡强度。相位控制部73控制环谐振器2的谐振长。反馈控制部72对相位控制部73进行反馈控制,以使光测量部71测量的振荡强度被最大化为预定的强度。反馈控制部72可以应用作为激光振荡频率的稳定化技术的PDH(Pound-Drever-Hall)法或FM(Frequency Modulation调频)边带法等。
局部振荡光控制部8包括光测量部81、反馈控制部82及相位控制部83。多个虚脉冲及多个模拟自旋脉冲经由环谐振器2上的相位测量地点及向环谐振长控制部7的分波地点,输入到局部振荡光控制部8。局部振荡光在相位控制部83输入到局部振荡光控制部8。
光测量部81输出多个虚脉冲与暂时自旋测量部3在多个模拟自旋脉冲的相位测量中使用的局部振荡光之间的干渉结果。相位控制部83控制多个模拟自旋脉冲与暂时自旋测量部3在多个模拟自旋脉冲的相位测量中使用的局部振荡光之间的干渉时刻。反馈控制部82对相位控制部83进行反馈控制,以使光测量部81输出的干渉结果成为根据多个虚脉冲的预定振荡相位推断的预定干渉结果。在此,光测量部81、相位控制部83及图5所示的合波地点能够在暂时自旋测量部3与局部振荡光控制部8之间共同使用。
注入脉冲控制部9包括:光测量部91、反馈控制部92及相位控制部93。多个虚注入脉冲及多个自旋注入脉冲在相位控制部93被输出到注入脉冲控制部9。在此,多个虚注入脉冲是相互作用实施部5向多个虚脉冲的光注入中使用的具有预定振荡相位的脉冲。而且,多个自旋注入脉冲是相互作用实施部5向多个模拟自旋脉冲的光注入中使用的具有考虑到相互作用的振荡相位的脉冲。
在环谐振器2环绕输送的多个虚脉冲及多个模拟自旋脉冲、与相位控制部93输出的多个虚注入脉冲及多个自旋注入脉冲,在环谐振器2上的光注入地点合波。在环谐振器2上的光注入地点合波后的多个脉冲朝向环谐振器2及光测量部91分波。
光测量部91输出多个虚脉冲与相互作用实施部5向多个虚脉冲的光注入中使用的具有预定振荡相位的多个虚注入脉冲之间的干渉结果。相位控制部93控制多个模拟自旋脉冲与相互作用实施部5向多个模拟自旋脉冲的光注入中使用的具有考虑到相互作用的振荡相位的多个自旋注入脉冲之间的干渉时刻。反馈控制部92对相位控制部93进行反馈控制,以使光测量部91输出的干渉结果成为根据多个虚脉冲的预定振荡相位推断的预定干渉结果。在此,相位控制部93及环谐振器2上的光注入地点能够在相互作用实施部5和注入脉冲控制部9之间共同使用。
当执行伊辛模型的量子计算装置Q的相位特性校准时,注意以下事项:(1)也可并行执行由环谐振长控制部7、局部振荡光控制部8及注入脉冲控制部9进行的校准。(2)也可结束由环谐振长控制部7进行的校准之后,并行执行由局部振荡光控制部8及注入脉冲控制部9进行的校准。(3)在校准的动作速度慢时,也可在每当多个模拟自旋脉冲在环谐振器2中环绕输送多次时执行校准。(4)在校准的动作速度快时,也可在每当多个模拟自旋脉冲在环谐振器2中环绕输送单次时执行校准。(5)也可并行地执行校准及伊辛模型计算。(6)也可在结束校准后执行伊辛模型计算。(7)优选环谐振长控制部7、局部振荡光控制部8及注入脉冲控制部9对多个虚脉冲及多个模拟自旋脉冲掌握它们之间的边界及各自的序号。
即便根据伊辛模型的量子计算装置Q的设置环境(例如温度等)随时间发生变动,环谐振器2的谐振长也随时间发生变动,也能够将环谐振器2的谐振长稳定化在恒定值。故而,在每当多个模拟自旋脉冲在环谐振器2中环绕输送多次或单次时,能够使简并光学参量振荡器1中的相位感应放大器10的放大强度、与暂时自旋测量部3中的局部振荡光的干渉时刻、及与相互作用实施部5中的注入脉冲的干渉时刻稳定化。而且,能够正确地执行简并光学参量振荡器1中的相位感应放大器10的脉冲稳定化、暂时自旋测量部3中的脉冲相位测量、及相互作用实施部5中的相互作用实施,以至能够大幅提高伊辛模型的量子计算装置Q的计算精度。
下面,表示第二顺序中量子计算的时间发展及计算结果。作为前提,不考虑1体及3体的相互作用,而仅考虑2体的相互作用,伊辛哈密顿函数如数式7所示,速率方程式如数式8、9所示。
[数7]
[数8]
[数9]
根据数式8、9可知,是否使伊辛模型的量子计算装置Q整体动作不会变得不稳定,降低产生误答的可能性,不仅由反馈延迟L周决定,还由结合系数ξ及泵浦速率p决定。
(利用反馈延迟L周补偿结合系数ξ的方法)
当自旋的测量及相互作用的实施中断时,与自旋的测量及相互作用的实施不中断时相比,对于模拟自旋脉冲SPi的注入强度在实效上变小。也就是说,在第二顺序中,与第一顺序相比,结合系数ξ在实效上变为1/(L+1)倍。而且,在第三顺序中,与第一顺序相比,结合系数ξ在实效上变为1/(1+1)=1/2倍(模拟自旋脉冲及虚脉冲为相同数量)。
因此,自旋的测量及相互作用的实施的中断期间越长,越加大对于模拟自旋脉冲SPi的注入强度,由此认为即使中断自旋的测量及相互作用的实施时,与不中断自旋的测量及相互作用的实施时同样地能够维持对于模拟自旋脉冲SPi的注入强度及泵浦增益的平衡。例如,在第二顺序中,将新结合系数设为ξ’=(L+1)ξ。而且,在第三顺序中,将新结合系数设为ξ’=(1+1)ξ=2ξ。
在第二顺序中,将结合系数ξ在反馈延迟L周未进行补偿的情况及进行补偿的情况下的随机图的量子计算的时间发展分别表示于图6、7。在第二顺序中,将结合系数ξ在反馈延迟L周未进行补偿的情况及进行补偿的情况下的随机图的量子计算的计算结果表示于图8。
在图6~8的随机图中,顶点数为800,且平均次数<k>为47.94,次数分布为二项分布。
图6及图8的上段的黑三角的点图中,泵浦速率p=1.1,结合系数ξ’=ξ=-0.06/√<k>=-0.009,结合系数ξ在反馈延迟L周未进行补偿。关于√<k>参照图8后述。
在图6的情况下,随着反馈延迟L周增加,量子计算精度单调减少,但未发现I成分ci振动的迹象。
图7及图8的上段的黑圆形的点图中,泵浦速率p=1.1,结合系数ξ’=(L+1)ξ=-0.06(L+1)/√<k>=-0.009(L+1),结合系数ξ在反馈延迟L周中补偿。
在图7的情况下,在反馈延迟0、1周中,未发现I成分ci振动的迹象,量子计算精度变高,在反馈延迟2、3周中,发现I成分ci振动的迹象,但I成分ci并不是在正及负之间振动,量子计算精度得以维持。
在图7的情况下,在反馈延迟4、5周中,发现I成分ci振动的迹象,且I成分ci在正及负之间振动,量子计算精度变低。认为这是由于即便考虑到反馈延迟L周,但结合系数ξ’=(L+1)ξ过大的缘故。
图8的上段表示将结合系数ξ以√<k>规格化的情况,图8的下段表示未将结合系数ξ以√<k>规格化的情况。在未将结合系数ξ以√<k>规格化的情况下,与将结合系数ξ以√<k>规格化的情况相比,可以发现在反馈延迟4、5周以上时,I成分ci的正及负之间的振动变得激烈。
如此,通过减小对于图次数高的模拟自旋脉冲SPi的注入强度,防止图次数高的伊辛自旋在σ=±1间振动,因此伊辛模型的量子计算装置Q整体的动作不会变得不稳定,产生误答的可能性降低。另外,在图6~8中,将结合系数ξ以√<k>规格化,但作为变形例,也可将结合系数ξ单纯以<k>规格化。
第二顺序中对结合系数ξ以反馈延迟L周未进行补偿的情况及进行补偿的情况下的无标度图的量子计算的时间发展分别表示于图9、10。第二顺序中对结合系数ξ以反馈延迟L周未进行补偿的情况及进行补偿的情况下的无标度图的量子计算的计算结果表示于图11。
在图9~11的无标度图中,顶点数为800,平均次数<k>为11.735,次数分布为幂律分布(power-law distribution)。
在图9及图11的上段的黑三角点图中,泵浦速率p=1.1,结合系数ξ’=ξ=-0.06/√<k>=-0.018,结合系数ξ未在反馈延迟L周中补偿。关于√<k>参照图11后述。
在图9的情况下,随着反馈延迟L周增加,量子计算精度单调减少,但未发现I成分ci振动的迹象。
在图10及图11的上段的黑圆形点图中,泵浦速率p=1.1,结合系数ξ’=(L+1)ξ=-0.06(L+1)/√<k>=-0.018(L+1),结合系数ξ在反馈延迟L周中补偿。
在图10的情况下,在反馈延迟0、1周中,未发现I成分ci振动的迹象,量子计算精度变高,在反馈延迟2~5周中,发现I成分ci振动的迹象,但I成分ci并不是在正及负之间振动,量子计算精度得以维持。
在图10的情况下,与图7的情况不同,在反馈延迟4、5周中,发现I成分ci发生振动的迹象,但I成分ci并不是在正及负之间振动,量子计算精度得以维持。认为这是因为图10的情况与图7的情况相比,由于平均次数<k>小,因此注入强度小的缘故。
图11的上段表示将结合系数ξ以√<k>规格化的情况,图11的下段表示未将结合系数ξ以√<k>规格化的情况。可以发现结合系数ξ未以√<k>规格化的情况与结合系数ξ以√<k>规格化的情况同样,即便在反馈延迟4、5周以上,I成分ci的正及负之间的振动也未变得激烈。
尽管如此,通过减小对于图次数高的模拟自旋脉冲SPi的注入强度,防止图次数高的伊辛自旋在σ=±1之间振动,因此伊辛模型的量子计算装置Q整体的动作不会变得不稳定,产生误答的可能性降低。另外,在图9~11中,将结合系数ξ以√<k>规格化,但作为变形例,也可将结合系数ξ单纯以<k>规格化。
在第二顺序中对结合系数ξ在反馈延迟L周中未进行补偿的情况及进行补偿的情况下的完全图的量子计算的时间发展分别表示于图12、13。第二顺序中对结合系数ξ在反馈延迟L周中未进行补偿的情况及进行补偿的情况下的完全图的量子计算的计算结果表示于图14。
在图12~14的完全图中,顶点数为800,平均次数<k>为799,次数分布为均匀分布。
在图12及图14的上段的黑三角的点图中,泵浦速率p=1.1,结合系数ξ’=ξ=-0.06/√<k>=-0.002,结合系数ξ在反馈延迟L周中未补偿。关于√<k>参照图14后述。
在图12的情况下,随着反馈延迟L周增加,量子计算精度单调减少,但未发现I成分ci发生振动的迹象。
在图13及图14的上段的黑圆形的点图中,泵浦速率p=1.1,结合系数ξ’=(L+1)ξ=-0.06(L+1)/√<k>=-0.002(L+1),结合系数ξ在反馈延迟L周中被补偿。
在图13的情况下,在反馈延迟0、1周中未发现I成分ci发生振动的迹象,量子计算精度变高,在反馈延迟2~5周中发现I成分ci发生振动的迹象,但I成分ci并不是在正及负之间振动,量子计算精度得以维持。
图13的情况与图7的情况不同,在反馈延迟4、5周中发现I成分ci发生振动的迹象,但I成分ci并不是在正及负之间振动,量子计算精度得以维持。认为这是因为图13的情况与图7的情况相比,由于平均次数<k>大,因此结合系数ξ’小的缘故。
图14的上段表示结合系数ξ以√<k>规格化的情况,图14的下段表示结合系数ξ未以√<k>规格化的情况。在结合系数ξ未以√<k>规格化的情况下,与结合系数ξ以√<k>规格化的情况相比,可以发现在反馈延迟4、5周以上,I成分ci的正及负之间的振动变得激烈。
如此,通过减小对于图次数高的模拟自旋脉冲SPi的注入强度,防止图次数高的伊辛自旋在σ=±1之间振动,因此伊辛模型的量子计算装置Q整体的动作不会变得不稳定,产生误答的可能性降低。另外,在图12~14中,将结合系数ξ以√<k>规格化,但作为变形例也可将结合系数ξ单纯以<k>规格化。
(泵浦速率p在反馈延迟L周中补偿的方法)
当中断自旋的测量及相互作用的实施时,与不中断自旋的测量及相互作用的实施时相比,对于模拟自旋脉冲SPi的注入强度在实效上变小。也就是说,在第二顺序中,与第一顺序相比,结合系数ξ在实效上变为1/(L+1)倍。而且,在第三顺序中,与第一顺序相比,结合系数ξ在实效上变为1/(1+1)=1/2倍(模拟自旋脉冲及虚脉冲为相同数)。
因此认为,自旋的测量及相互作用的实施的中断期间越长,越减小对模拟自旋脉冲SPi的泵浦增益,由此即便中断自旋的测量及相互作用的实施时,也能够与未中断自旋的测量及相互作用的实施时同样地维持对模拟自旋脉冲SPi的注入强度及泵浦增益的平衡。例如,在第二顺序中,将新的泵浦速率设为p’=p/(L+1),作为减小泵浦速率的补偿,将新的计算时间设为(L+1)倍。而且,在第三顺序中,将新的泵浦速率设为p’=p/(1+1)=p/2,作为减小泵浦速率的补偿,将新的计算时间设为1+1=2倍。
在第二顺序中对泵浦速率p在反馈延迟L周中进行补偿的情况下的随机图的量子计算的计算结果表示于图15。在图15的随机图中,与图6~8中的随机图同样,顶点数为800,平均次数<k>为47.94,次数分布为二项分布。
泵浦速率p’=p/(L+1),结合系数ξ’=ξ=-0.06/√<k>=-0.009,泵浦速率p在反馈延迟L周中被补偿,图15中的计算时间是图6~8中的计算时间的(L+1)倍。
在泵浦速率p=0.3的情况下,在反馈延迟0~2周中,量子计算精度变高,在反馈延迟2~4周中,量子计算精度急剧下降,在反馈延迟4~10周中,量子计算精度维持在低水平。在泵浦速率p=0.5的情况下,在反馈延迟0~8周中,量子计算精度变高,在反馈延迟8~10周中,量子计算精度急剧下降。在泵浦速率p=0.7的情况下,在反馈延迟0~10周中,量子计算精度变高。在泵浦速率p=0.9、1.1的情况下,随着反馈延迟增加,量子计算精度单调减少。如此,认为泵浦速率p=0.5、0.7左右是泵浦速率p的最佳值。
在第二顺序中,对泵浦速率p在反馈延迟L周中进行补偿的情况下的无标度图的量子计算的计算结果表示于图16。图16的无标度图中,与图9~11中的无标度图同样地,顶点数为800,平均次数<k>为11.735,次数分布为幂律分布。
泵浦速率p’=p/(L+1),结合系数ξ’=ξ=-0.06/√<k>=-0.018,泵浦速率p在反馈延迟L周中被补偿,图16中的计算时间是图9~11中的计算时间的(L+1)倍。
在泵浦速率p=0.3的情况下,随着反馈延迟增加,量子计算精度单调减少。在泵浦速率p=0.5的情况下,在反馈延迟0~10周中,存在一些单调减少,但量子计算精度变高。在泵浦速率p=0.7的情况下,在反馈延迟0~10周中,量子计算精度变高。在泵浦速率p=0.9、1.1的情况下,随着反馈延迟增加,量子计算精度单调减少。如此,认为泵浦速率p=0.5、0.7左右是泵浦速率p的最佳值。
在第二顺序中对泵浦速率p在反馈延迟L周中进行补偿的情况下的完全图的量子计算的计算结果表示于图17。在图17的完全图中,与图12~14的完全图同样,顶点数为800,平均次数<k>为799,次数分布为均匀分布。
泵浦速率p’=p/(L+1),结合系数ξ’=ξ=-0.06/√<k>=-0.002,泵浦速率p在反馈延迟L周中被补偿,图17中的计算时间是图12~14中的计算时间的(L+1)倍。
在泵浦速率p=0.3的情况下,在反馈延迟0~3周中,量子计算精度变高,在反馈延迟3~4周中,量子计算精度急剧下降,在反馈延迟4~10周中,量子计算精度维持在低水平。在泵浦速率p=0.5的情况下,在反馈延迟0~9周中,量子计算精度变高,在反馈延迟9~10周中,量子计算精度急剧下降。在泵浦速率p=0.7的情况下,在反馈延迟0~10周中,量子计算精度变高。在泵浦速率p=0.9、1.1的情况下,随着反馈延迟增加,量子计算精度单调减少。如此,认为泵浦速率p=0.5、0.7左右是泵浦速率p的最佳值。
(设定结合系数ξ及泵浦速率p的方法)
在图6~14中,对结合系数ξ在反馈延迟L周进行补偿,泵浦速率p与反馈延迟L周无关而被固定。在图15~17中,对泵浦速率p在反馈延迟L周进行补偿,结合系数ξ与反馈延迟L周无关而被固定。下面,说明在反馈延迟L周补偿之前的结合系数ξ及泵浦速率p的设定方法。
在第二顺序中结合系数ξ及泵浦速率p可变的情况下的随机图的量子计算的计算结果表示于图18。在图18的随机图中,与图6~8、15的随机图同样,顶点数为800,平均次数<k>为47.94,次数分布为二项分布。另外,图18中的结合系数ξ是利用√<k>规格化之前的。
反馈延迟越是短时间,赋予高量子计算精度的结合系数ξ及泵浦速率p的区域越宽,反馈延迟越是长时间,赋予高量子计算精度的结合系数ξ及泵浦速率p的区域(|ξ|~0.04、p~0.55附近的区域)越窄。
在第二顺序中结合系数ξ及泵浦速率p可变的情况下的无标度图的量子计算的计算结果表示于图19。在图19的无标度图中,与图9~11、16的无标度图同样,顶点数为800,平均次数<k>为11.735,次数分布为幂律分布。另外,图19的结合系数ξ是利用√<k>规格化之前的。
反馈延迟越是短时间,赋予高量子计算精度的结合系数ξ及泵浦速率p的区域越宽,反馈延迟越是长时间,赋予高量子计算精度的结合系数ξ及泵浦速率p的区域(|ξ|~0.09、p~0.60附近的区域)越窄。
在此,对应于待解的NP完全问题的伊辛模型在与图18、19中的随机图或无标度图近似的情况下,可以采用图18、19中的赋予高量子计算精度的结合系数ξ及泵浦速率p的区域。
而且,与对应于待解的NP完全问题的伊辛模型相近似的图为位点数小的情况下,反馈延迟为短时间即可,赋予高量子计算精度的结合系数ξ及泵浦速率p的区域不必严格地解出(结合系数ξ、泵浦速率p)的组合最佳化问题,就能够容易地找到。
但是,与对应于待解的NP完全问题的伊辛模型相近似的图为位点数大的情况下,反馈延迟需要长时间,赋予高量子计算精度的结合系数ξ及泵浦速率p的区域需要严格地解出(
伊辛模型的量子计算装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0