









专利摘要
用于磁场传感的磁致伸缩机械装置,它涉及一种磁致伸缩机械装置。该装置解决目前现有的基于磁致伸缩原理光学电流互感器保护部分器件过多引入的误差过多的问题,以及过多的保护器件造成保护动作时间过长的问题。第一短杆的外部设有第一铁磁材料层,第一短杆与第一长杆连接并制成一体,第一长杆与二级圆弧状强磁体连接,第一杠杆轴穿过第一长杆;磁致伸缩棒与隔磁板连接,隔磁板与一级圆弧状强磁体连接,一级圆弧状强磁体与第一短杆的侧壁连接,第二短杆的外部设有第二铁磁材料层,第二短杆与第二长杆连接并制成一体,第二杠杆轴穿过第二长杆,第二长杆与触发头连接,触发头与触发探测器对应设置。本发明具有处理时间短,所用器件少,动作迅速的特点。
说明书
技术领域
本发明涉及一种磁致伸缩机械装置。
背景技术
现有的基于磁致伸缩原理的互感器保护部分设计均是当母线发生短路时,其流过的电流将会变大超过正常值,稀土超磁致伸缩材料产生的机械形变经过测量转换成电信号,电信号传送到控制电路后进行分析,确认短路时产生断路信号,最终电信号作用于断路器进行断路,在这个过程中需要对信号的处理较为复杂,可能会产生-些误差造成误动作或据动作,而且需要的电路结构也非常复杂。
发明内容
本发明的目的是提供一种用于磁场传感的磁致伸缩机械装置,以解决现有的基于磁致伸缩原理光学电流互感器保护部分器件过多引入的误差过多的问题,以及过多的保护器件造成保护动作时间过长的问题。
本发明为解决上述技术问题采取的技术方案是:本实施方式的所述装置包括一级杠杆传动装置,二级杠杆传动装置、磁致伸缩棒、隔磁板、一级圆弧状强磁体、二级圆弧状强磁体、触发头和触发探测器,一级杠杆传动装置由第一杠杆、第一杠杆轴和第一铁磁材料层组成,第一杠杆包括第一长杆和第一短杆,第一短杆的一端的外部设有第一铁磁材料层,第一短杆的另一端与第一长杆的一端连接并制成一体,第一长杆的另一端的侧壁与二级圆弧状强磁体的一端连接,第一杠杆轴穿过第一长杆且第一杠杆轴所在位置靠近第一长杆和第一短杆连接处;
磁致伸缩棒与隔磁板的一端连接,隔磁板的另一端与一级圆弧状强磁体的一端连接,一级圆弧状强磁体的另一端与第一短杆的侧壁连接;
二级杠杆传动装置由第二杠杆、第二杠杆轴和第二铁磁材料层组成,第二杠杆包括第二长杆和第二短杆,第二短杆的一端的外部设有第二铁磁材料层,第二短杆的另一端与第二长杆的一端连接并制成一体,第二杠杆轴穿过第二长杆且第二杠杆轴所在位置靠近第二长杆和第二短杆连接处,第二长杆的另一端与触发头的一端连接,触发头的另一端与触发探测器对应设置。
本发明具有以下有益效果:运行过程中,当电流处于正常值范围内时,磁致伸缩棒将会在一定幅度范围内不断伸缩,经过两级杠杆装置连接的触发头也将会在一定范围内往复运动。当电流超过设置的短路触发值时,触发头的运动范围将会扩大,通过计算及调试,可在短路电流触发值相对应的触发点放置触发探测器。这样,当电流处于正常状态时触发头将接触不到触发探测器,从而不发出短路信号;当电流超过短路电流触发值时,触发头将会与触发探测器产生接触撞击,从而产生断路信号发送到断路器,进行断路;本发明将短路时稀土超磁致伸缩材料的形变测量简化,然后将形变信号作用于断路电路,省略掉中间复杂的信号转换过程及判断过程。由于稀土超磁致伸缩材料在一定条件下具有很好的线性度,即其体积相对变化率与互感磁场的大小成正比,通过计算可以得到正常运行时及短路时材料的长度,这两个长度间根据一定的系数选择一个长度作为触发点,当短路时稀土超磁致伸缩材料将碰到触发点造成触发,然后这个触发直接作用于断路器进行断路。本发明具有结构简单,对故障电流响应速度快,处理过程中引入误差少,可靠性高的优点。
附图说明
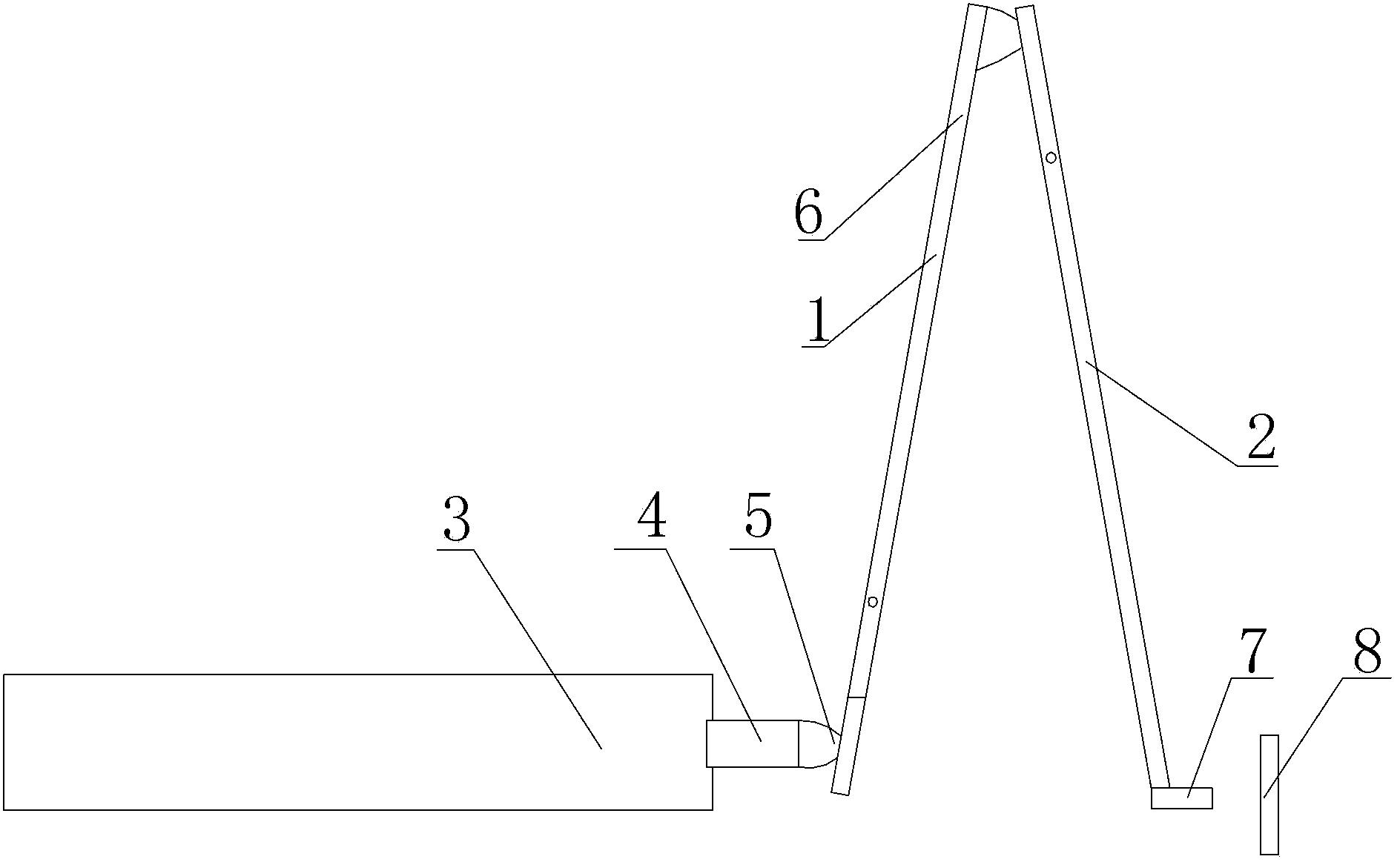
图1是本发明整体结构示意图,图2是本发明的一级杠杆装置和二级杠杆装置连接结构示意图。
具体实施方式
具体实施方式一:结合图1和图2说明本实施方式,本实施方式的所述装置包括一级杠杆传动装置1,二级杠杆传动装置2、磁致伸缩棒3、隔磁板4、一级圆弧状强磁体5、二级圆弧状强磁体6、触发头7和触发探测器8,一级杠杆传动装置1由第一杠杆、第一杠杆轴12和第一铁磁材料层14组成,第一杠杆包括第一长杆11和第一短杆13,第一短杆13的一端的外部设有第一铁磁材料层14,第一短杆13的另一端与第一长杆11的一端连接并制成一体,第一长杆11的另一端的侧壁与二级圆弧状强磁体6的一端连接,第一杠杆轴12穿过第一长杆11且第一杠杆轴12所在位置靠近第一长杆11和第一短杆13连接处;
磁致伸缩棒3与隔磁板4的一端连接,隔磁板4的另一端与一级圆弧状强磁体5的一端连接,一级圆弧状强磁体5的另一端与第一短杆13的侧壁连接;
二级杠杆传动装置2由第二杠杆、第二杠杆轴22和第二铁磁材料层24组成,第二杠杆包括第二长杆21和第二短杆23,第二短杆23的一端的外部设有第二铁磁材料层24,第二短杆23的另一端与第二长杆21的一端连接并制成一体,第二杠杆轴22穿过第二长杆21且第二杠杆轴22所在位置靠近第二长杆21和第二短杆23连接处,第二长杆21的另一端与触发头7的一端连接,触发头7的另一端与触发探测器8对应设置。
具体实施方式二:结合图1说明本实施方式,本实施方式的磁致伸缩棒3由稀土超磁致伸缩材料Tb0.27Dy0.73Fe2制成,所述磁致伸缩棒3的长度为180-220mm,此结构用于减小干扰。其它实施方式与具体实施方式一相同。
具体实施方式三:结合图1说明本实施方式,本实施方式的触发探测器8与所述触发头7之间的水平距离为30-40mm。其它实施方式与具体实施方式一相同。
工作原理:结合图1和图2说明本发明的工作过程:当导线通过电流时,将所述磁致伸缩棒3放置于导线附近的磁场中,所述磁致伸缩棒3在磁场的作用下做伸缩运动,带动所述隔磁板4做往复运动,所述隔磁板4推动所述一级圆弧状强磁体5,所述一级圆弧状强磁体5靠磁性吸附力带动所述一级杠杆传动装置1运动,所述一级杠杆传动装置1通过所述二级圆弧状强磁体6料带动所述二级杠杆传动装置2作往复运动,所述二级杠杆传动装置2带动所述触发头7运动;运行过程中,当电流处于正常值范围内时,所述磁致伸缩棒3将会在一定幅度范围内不断伸缩,所述触发头7也将会在一定范围内往复运动。当电流超过设置的短路触发值时,所述触发头7的运动范围将会扩大,通过计算及调试,可在短路电流触发值相对应的触发点放置所述触发探测器8。这样,当电流处于正常状态时所述触发头7将接触不到所述触发探测器8,从而不发出短路信号;当电流超过短路电流触发值时,所述触发头7将会与所述触发探测器8产生接触撞击,从而产生断路信号发送到断路器,进行断路。
所述第一铁磁材料层14受到磁力吸附做反复运动带动所述第一长杆11运动,所述二级圆弧状强磁体6一端连接到所述第一长杆11的一端,并通过磁力吸附,吸附住所述第二铁磁材料层24并带动第二长杆22做往复运动。
用于磁场传感的磁致伸缩机械装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0