

IPC分类号 : G05B19/18,G05B19/404,G05B19/408,G05B19/4097,B23F9/00







专利摘要
本发明公开了一种螺旋锥齿轮形性协同加工参数混合反调修正方法,给出一种几何与物理性能协同优化方案,优化目标是可任意预设的ease‑off齿面,优化结果是带反调量的精确加工参数,使反调过程变成理论设计齿面向预设ease‑off目标齿面的无穷最小化逼近过程,逼近程度定义残余ease‑off来评判。考虑ease‑off齿面的高阶性能,建立考虑误差齿面高阶特性的可预设制造精度的通用加工参数反调模型,优化加工参数为最优设计变量,考虑建立目标函数的强烈非线性,并探究其原因,提供更高效更精确更稳定的非线性最小二乘鲁棒性算法,获得可靠稳定的数值解。同时借助齿面接触性能分析的主要手段有限元LTCA技术,提出几何与物理性能协同优化的通用加工参数混合反调的主动创成方法。
权利要求
1.一种螺旋锥齿轮形性协同加工参数混合反调修正方法,包括以下两个步骤:
i)通过几何性能残余ease-off的高阶加工参数反调修正来评价齿面几何性能;
ii)利用有限元LTCA的比例反调,对步骤i)考虑几何性能反调后的齿面进行物理性能评价与决策,输出最终优化的精确加工参数;
iii)确定形性协同制造的决策方案;
其中步骤i)包括以下分步:
i.1)将ease-off定义为任何设计齿面相对于其基本齿面的几何修正量,将ease-off根据制造精度要求预设为一个理论设计与实际加工之间的容差,并根据预设ease-off要求来确定最终的目标齿面;
i.2)建立考虑误差齿面高阶特性的可预设加工精度的通用加工参数反调模型,确定其目标函数;
i.3)通过非线性最小二乘鲁棒性算法对已确定的目标函数进行精确计算求解,实现参数驱动设计齿面并达到与目标齿面的精确匹配;
步骤ii)包括以下分步:
ii.1)确定基于LTCA的齿面物理性能评价指标
最大齿面接触应力CP
ii.2)考虑几何与物理性能协同的比例反调
基于敏感性分析的优化加工参数选择;
确定考虑几何与物理性能的形性协同制造参数的比例反调方案。
2.如权利要求1所述的螺旋锥齿轮形性协同加工参数混合反调修正方法,其特征在于:步骤i.1)的具体步骤如下:
通过离散化获得基本齿面网格点,在基本齿面采样点网格中,第i个点的矢量及其法向矢量表示为
式中(u,θ)是曲面表达高斯参数,而φ则是最基本的运动参数;x
式中,设计齿面与基本齿面之间的偏差值h
3.如权利要求2所述的螺旋锥齿轮形性协同加工参数混合反调修正方法,其特征在于:步骤i.2)的具体步骤如下:
当一个含有m个离散点p
在无穷小逼近目标齿面过程中,设计齿面与目标齿面的法向偏差hi∈h=(h1,...,hm),i∈[1,m]定义为残余ease-off,用来评价其精度,ease-off的单位阈值可以根据实际齿面CMM测量来确定;同样的,所求点的法向矢量表示为n=(n
其中,刀具与齿坯的相对速度v
v
式中,ω和r分别表示角速度和位移矢量,上标c和b分别表示刀盘刀具和齿坯;显然,f((u,θ,φ
[p
由于齿面点数目远大于加工参数数目,即m>n,f:
式中,
4.如权利要求3所述的螺旋锥齿轮形性协同加工参数混合反调修正方法,其特征在于:步骤i.3)的具体步骤如下:
对于方程(7),其目标函数可转化为:
其求解主要考虑非线性造成的两个问题:加工参数之间的耦合作用;雅克比矩阵的病态问题;
首先,计算目标函数F(x)的偏导,ease-off齿面形貌具有高阶特性,则函数f具有连续二阶偏导,其泰勒展开式为
f(x+d)=f((u,θ,φ
式中J∈R
而雅克比矩阵的病态问题和齿面加工参数之间的耦合作用也密切相关,对于函数F:
在该非线性方程求解中,迭代过程十分复杂,不得不对迭代步进行优化规划;这样,目标函数F(x)的梯度为
F′(x):→F′(x)=F′((u,θ,φ
在迭代中,也需要计算F(x)的海森矩阵,则在(j,k)处的单元为
有
在加工参数高阶反调中,最终的输出结果是确定含有反调量的精确的加工参数x*:=((u,θ,φ
5.如权利要求1所述的螺旋锥齿轮形性协同加工参数混合反调修正方法,其特征在于:针对步骤ii.1),在LTCA中,接触印痕及接触应力可以直接输出来,根据不同颜色区分的云图,确定反映出较大接触应力的基本位置,再通过更为精确的等值线云图分布情况进一步确定接触应力最大值CP
6.如权利要求1所述的螺旋锥齿轮形性协同加工参数混合反调修正方法,其特征在于:针对步骤ii.1),载荷传动误差LTE
式中,Δε
7.如权利要求1所述的螺旋锥齿轮形性协同加工参数混合反调修正方法,其特征在于:针对步骤ii.1),螺旋锥齿轮的齿轮副处于啮合状态时,齿面上必然会产生接触力;一旦齿轮副啮出时,接触力消失;通过监测单齿从啮入到啮出过程中所经历的时间ΔT,以及该齿啮入到相邻单齿啮入的时间间隔Δt,齿轮接触的重合度为
对应的时间间隔都可以直接在基于有限元软件LTCA的输出结果中提取得到。
8.如权利要求1所述的螺旋锥齿轮形性协同加工参数混合反调修正方法,其特征在于:针对步骤ii.2),敏感性分析法被用来对初始的加工参数进行优化选择可表示为
s.t.x
J
式中,k表示所选择的优化加工参数x
9.如权利要求1所述的螺旋锥齿轮形性协同加工参数混合反调修正方法,其特征在于:步骤ii.2)的具体步骤如下:
ii.2.1)设定优化加工参数x
并且,K
ii.2.2)确立总的比例反调方案,主要包括以下设置:
N个微调参数K
设定载荷工况;
N个比例修正方案;
ii.2.3)LTCA和对应每一种比例反调方案的三个指标CP
ii.2.4)物理性能协同评价和最终加工参数的确定;
这里,考虑到工程设计系统中优化方法和最优解的重要性,在提出的比例反调中会涉及物理性能指标的多目标综合优化评价,其目标函数可表示为
min F
f
f
s.t.K
l=(l
式中,
式中,HTP
说明书
技术领域
本发明属于螺旋锥齿轮加工领域,具体为一种螺旋锥齿轮形性协同加工参数混合反调修正方法。
一直以来,理论设计齿面几何形貌与实际加工齿面的精确匹配都是齿轮精度控制的主要目标,而满足齿面接触使役性能要求的精确齿面几何优化则成为推动齿轮加工技术不断发展的动力。在齿轮设计中,齿面几何形状与性能要求的协同优化,已经成为一个日益重要的环节。而对于螺旋锥齿轮来说,其复杂的展成运动和冗余的加工参数使得其形性协同设计方案充满挑战。为此,几大著名螺旋锥齿轮生产厂家都开发了各自的先进集成商用软件包:Gleason公司的CAGE
目前有一种基于螺旋锥齿轮参数驱动设计方法,它可将齿面通用建模、齿面误差修正、齿面接触分析拓展并集成一个全闭环的UMC加工参数驱动的形性协同齿轮加工系统。通过加工参数的反调来修正所谓的齿面ease-off形貌,以达到齿面几何与物理性能协同优化的目的。
但是它在加工误差反调修正中,一般只考虑齿面几何性能要求即齿面误差或者ease-off,整个过程实际上就是设计齿面向实际加工齿面的无穷逼近过程。同时,建立的目标函数是关于设计齿面与实际加工齿面的无穷最小,这意味着理论求解的带反调量的加工参数获得齿面必须与实际加工齿面一致,也意味着理论上的制造精度为零,很显然这种方案设计是存在很大的局限性,具体原因如下:
首先,实际加工过程中必然存在着或多或少的误差,不可能使得理论设计的齿面就是所需要的实际齿面,这将导致求解的精确参数缺乏实用性。
其次,在反调建模中,以实际齿面作为逼近的目标齿面,将导致这个设计方案缺乏柔性和灵活性。
再次,在无穷最小逼近过程中,其逼近程度没有给出相应的度量或者评价标准,缺乏足够的精度。
最后,由于建立的目标函数具有强烈的非线性,无法获得足够稳定的数值解。
发明内容
本发明的目的在于提供一种考虑几何与物理性能协同优化的加工参数反调修正方法,提供螺旋齿轮加工的决策模型,输出最终优化的精确加工参数。
本发明提供的这种螺旋锥齿轮加工参数反调修正方法,包括以下两个步骤:
i)通过几何性能残余ease-off的高阶加工参数反调修正来评价齿面几何性能;
ii)利用有限元LTCA的比例反调,对i)考虑几何性能反调后的齿面进行物理性能评价与决策,输出最终优化的精确加工参数;
iii)确定形性协同制造的决策方案;
其中步骤i)包括以下分步:
i.1)将ease-off定义为任何设计齿面相对于其基本齿面的几何修正量(hi
i.2)建立考虑误差齿面高阶特性的可预设加工精度的通用加工参数反调模型,确定其目标函数;
i.3)通过鲁棒性算法对已确定的目标函数进行精确计算求解,实现参数驱动设计齿面并达到与目标齿面的精确匹配;
其中步骤ii)包括以下分步:
ii.1)确定基于LTCA的齿面物理性能评价指标
最大齿面接触应力CPMAX;最大载荷传动误差LTEMAX和齿面重合度εγ;
ii.2)考虑几何与物理性能协同的比例反调
基于敏感性分析的优化加工参数选择;
确定考虑几何与物理性能的形性协同制造参数的比例协调方案。
上述技术方案的一种实施方式中,步骤i.1)的具体步骤如下:
通过离散法获得基本齿面网格点,在基本齿面采样点网格中,第i个点的矢量及其法向矢量表示为
式中,(u,θ)是曲面表达高斯参数,而φ则是最基本的运动参数;x
式中,设计齿面与基本齿面之间的偏差值hi
上述技术方案的一种实施方式中,步骤i.2)的具体步骤如下:
当一个含有m个离散点pi
在无穷小逼近目标齿面过程中,设计齿面与目标齿面的法向偏差hi∈h=(h1,...,hm),i∈[1,m]定义为残余ease-off,用来评价其精度,ease-off的单位阈值可以根据实际齿面CMM测量来确定;同样的,所求点的法向矢量表示为n=(n1,...,nm);则该匹配过程也是一个预设ease-off的有效补偿过程,它构成了含4个未知标量即(u,θ,φi)∈R
其中,刀具与齿坯的相对速度v
v
式中,w和r分别表示角速度和位移矢量,上标c和b分别表示刀盘刀具和齿坯。显然,f((u,θ,φi),x)=0表示齿面建模过程中的啮合方程,则残余ease-off为
[pi*-p((u,θ,φi),x)]·n((u,θ,φi),x)=hi (6)
由于齿面点数目远大于加工参数数目,即m>n, 则求解的n个为指标量和没有求解的m-n个未知变量是相互依赖的,即使它们共同构成了所求齿面的参数化表达;所以,加工参数反调实际上就是残余ease-off的非线性最小化过程;所以传统的只考虑几何性能优化的反调可拓展为高阶形式,构成了螺旋锥齿轮高阶加工参数反调方法,其目标函数可以表示为:
式中, 表示人为预设的齿面ease-off要求的精度阈值。
上述技术方案的一种实施方式中,步骤i.3)的具体步骤如下:
对于方程(7),其目标函数可转化为:
其求解主要考虑非线性造成的两个问题:i)加工参数的之间的耦合作用;ii)雅克比矩阵的病态问题。
首先,计算目标函数F的偏导,ease-off齿面形貌具有高阶特性,则函数f具有连续二阶偏导,其泰勒展开式为
f(x+d)=f((u,θ,φi),x)+J((u,θ,φi),x)d+O(||d||
式中J∈R
而雅克比矩阵的病态问题和齿面加工参数之间的耦合作用也密切相关,对于函数 方程(8)的一阶计算公式为
在该非线性方程求解中,迭代过程十分复杂,不得不对迭代步进行优化规划;这样,目标函数F(x)的梯度为
F′(x):→F′(x)=F′((u,θ,φi),x)=J((u,θ,φi),x)
在迭代中,也需要计算F(x)的海森矩阵,则在(j,k)处的单元为
有
在加工参数高阶反调中,最终的输出结果是确定含有反调量的精确的加工参数x*:=((u,θ,φi),x),从而实现参数驱动设计齿面并达到与目标齿面精确匹配的目的。
上述技术方案的一种实施方式中,针对步骤ii.1),在LTCA中,接触印痕及接触应力可以直接输出来,根据不同颜色区分的云图,确定反映出较大接触应力的基本位置,再通过更为精确的等值线云图分布情况进一步确定接触应力最大值CPMAX。
上述技术方案的一种实施方式中,其特征在于:针对步骤ii.1),载荷传动误差LTEMAX是齿轮副传动中噪声和振动的主要激励源之一;载荷传动误差定义为从动齿轮实际转动位置与理论转动位置的偏差;理论转动位置是完全刚性的主动轮和从动轮按照恒定的传动比完美接触共轭位置;如果大轮被认为从动轮,则传动误差函数表示为
式中,Δε1和Δε2分别表示小轮和大轮的旋转角度,z1和z2分别表示小轮和大轮的齿数;在齿轮副传动过程中各个时刻的大轮和小轮的旋转角度Δε2和Δε1可以通过后处理直接输出来,导入到公式(21)就可得到传动误差曲线,并可以提取最大值LTEMAX。
上述技术方案的一种实施方式中,针对步骤ii.1),螺旋锥齿轮的齿轮副处于啮合状态时,齿面上必然会产生接触力;一旦齿轮副啮出时,接触力消失;通过监测单齿从啮入到啮出过程中所经历的时间ΔT,以及该齿啮入到相邻单齿啮入的时间间隔Δt,齿轮接触的重合度为
对应的时间间隔都可以直接在基于有限元软件LTCA的输出结果中提取得到。
上述技术方案的一种实施方式中,针对步骤ii.2),敏感性分析法被用来对初始的加工参数进行优化选择可表示为
式中,k表示所选择的优化加工参数xOPT*的数目,i表示优化加工参数的序号,j表示初始加工加工参数的数目;在优化加工参数的选择中,对应参数的敏感性系数矩阵JiOPT是关键;kMAX=4。
上述技术方案的一种实施方式中,步骤ii.2)的具体步骤如下:
ii.2.1)设定优化加工参数xOPT的比例Kp,p=1,…,N;基于选定的加工参数初值,设定反调的比例范围尽量小于3%,有
并且,Kp=N+1/2=1表示初始值的比例;N表示设计方案的数目;在每次修正中的比例的变化量ρPM可用来确立最终方案。
ii.2.2)确立总的比例反调方案,主要包括以下设置:
N个微调参数KpxOPT;
设定载荷工况;
N个比例修正方案;
ii.2.3)LTCA和对应每一种比例反调方案的三个指标CPMAX,LTEMAX,和εγ的数字提取及确定;
ii.2.4)物理性能协同评价和最终加工参数的确定;
这里,考虑到工程设计系统中优化方法和最优解的重要性,在提出的比例反调中会涉及物理性能指标的多目标综合优化评价,其目标函数可表示为
式中, 表示k维决策变量;残余ease-off的标准方差hRSME用来表示主要的几何性能评价;f1,f2,f3和f4分别表示对应的几何与物理性能评价项hRSME,CPMAX,LTEMAX和εγ的目标函数;l和u分别表示N个关于优化比例加工参数KpxOPT的不等式约束的上下边界。另外,w1,w2,w3和w4分别表示4个评价指标的权重因子为
式中,HTPMAX和HTPMIN分别表示确定的hRSME(k=1),CPMAX(k=2),LTEMAX(k=3)和εγ(k=4)的最大值和最小值。
本发明突破现有技术只考虑几何性能即齿面误差或ease-off的反调方案的缺陷,给出了一种几何与物理性能协同优化方案,这种协同优化是通过两种方式集成得来的:i)考虑残余ease-off的高阶加工参数反调修正,用来评价几何性能;ii)利用有限元TCA包括载荷接触分析(LTCA)或动态接触分析(DTCA)的比例反调,对考虑几何性能反调后的齿面进行物理性能评价与决策,输出最终优化的精确加工参数。具体来说,本发明将传统设计中的齿面误差修正补偿、加工参数确定以及ease-off齿面修形重新定义为加工参数反调。采用更加通用的ease-off概念来定义加工参数反调的几何性能,同时可根据实际加工要求任意预设ase-off作为理论设计与实际加工之间的容差,并根据预设ease-off要求来确定最终的目标齿面。优化目标是可任意预设的ease-off齿面,优化结果是带反调量的精确加工参数。使整个反调过程变成了理论设计齿面向预设ease-off目标齿面的无穷最小化逼近过程,该过程的逼近程度则定义残余ease-off来评判。同时充分考虑ease-off齿面的高阶性能,建立了考虑误差齿面高阶特性的可预设制造精度的通用加工参数反调模型,优化加工参数作为最优设计变量,考虑建立目标函数的强烈非线性,充分探究造成目标函数强烈非线性的原因,提供了更加高效更加精确更加稳定的非线性最小二乘鲁棒性算法,获得可靠稳定的数值解。同时,借助齿面接触性能分析的主要手段有限元LTCA技术,提出几何与物理性能协同优化的通用加工参数混合反调的主动创成方法,并匹配了两种全闭环参数驱动决策方案,以获得最终高性能齿轮产品制造的精确加工参数。
附图说明
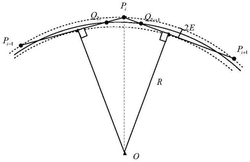
图1为定义几何性能齿面ease-off的示意图。
图2为基于参数驱动设计的加工参数反调模型示意图。
图3为确定物理性能指标最大齿面接触应力CPMAX的示意图。
图4为确定物理性能指标最大载荷传动误差LTEMAX的示意图。
图5为确定物理性能指标齿面重合度εγ的示意图。
图6为几何与物理性能协同优化的比例反调流程示意图。
图7为基于有限元LTCA/DTCA混合反调示意图。
图8为基于有限元LTCA/DTCA形性协同混合反调的基本决策流程示意图。
图9为针对不同的预设ease-off的拓扑图和分布图。
图10为齿面ease-off的敏感系数图。
图11为加工参数的敏感系数图。
图12为优化加工参数的敏感系数图:(a)Ra;(b)β;(c)q。
图13为优化反调和一般反调两种不同反调方案设定的迭代质量评价图。
图14为优化反调后的残余ease-off图:(a)拓扑图;(b)分布图。
图15为小轮的有限元网格模型图。
图16为不同接触单元条件下的最大接触应力的计算结果分析与比较图。
图17为基于LTCA的混合反调后的最优齿面物理性能结果图:(a)齿面接触应力;(b)齿根弯曲应力;(c)载荷传动误差。
图18为基于DTCA的混合反调后的最优齿面物理性能评价结果图:(a)FEM模型和接触单元位置;(b)动态齿面接触应力;(c)动态齿根弯曲应力。
具体实施方式
下面结合附图和算例对本发明的上述技术方案进一步说明。
本发明公开的这种螺旋锥齿轮加工参数反调修正方法,包括以下两个步骤:
i)通过几何性能残余ease-off的高阶加工参数反调修正来评价齿面几何性能;
ii)利用有限元LTCA的比例反调,对考虑几何性能反调后的齿面进行物理性能评价与决策,输出最终优化的精确加工参数;
iii)确定形性协同制造的决策方案;
其中步骤i)加工参数反调的具体过程如下:
i.1)定义齿面ease-off
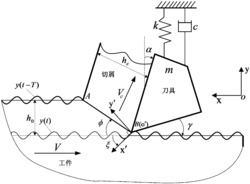
目前,ease-off通常被定位为大小齿轮在共轭接触状态时的偏差,而在本发明取其更通用有效的定义,ease-off被定义为任何相对于其基本设计齿面的几何修正量。一般而言,齿面都必须离散化去获得目标齿面网格点。如图1所示,在基本齿面采样点网格中,第i个点的矢量及其法向矢量表示为
式中,x
特别值得强调的是,基本齿面和设计齿面之间的偏差值hi
i.2)建立参数驱动模型
目前有一种基于参数驱动设计的加工参数反调模型用来补偿实际制造与设计之间的齿面误差。它理想化的齿面设计,追求齿面误差的无限最小化甚至趋近于零。由于在实际制造过程中,存在太多的无法避免的随机性误差,必然会导致理论设计与实际制造出现偏差,故这种理论化设计是没有实际意义的;这同时也意味着需要反复的加工参数反调过来,来不断修正设计结果直至满足制造要求。
另一种是可预设齿面误差范围的柔性化加工参数反调,即在基本齿面和实际所需要的齿面之间预设一个考虑误差范围的过渡齿面作为目标齿面,而整个加工参数反调变成一个目标齿面的无穷最小匹配过程。在该匹配目标齿面的过程中,残余ease-off作为新的评判标准。同时,含ease-off的目标齿面可以根据制造要求进行任意改动,是整个加工参数反调具有更好的灵活性和实用性。本发明在此基础上进行了改进,改进后加工参数反调模型如图2所示。
当一个含m个离散点pi
在无穷小逼近目标齿面过程中,设计齿面与目标齿面的法向偏差hi∈h=(h1,...,hm),i∈[1,m]定义为残余ease-off,用来评价其精度,一般ease-off的单位阈值可以根据实际齿面CMM测量来确定;同样的,所求点的法向矢量表示为n=(n1,...,nm)。则改匹配过程也是一个预设ease-off的有效补偿过程,类似于上一章的齿面误差补偿,它构成了含4个未知标量即(μ,θ,φi)∈R
其中,刀具于齿坯的相对速度v
v
式中,ω和r分别表示角速度和位移矢量,上标c和b分别表示刀盘刀具和齿坯。显然,f((u,θ,φi),x)=0表示齿面建模过程中的啮合方程,则残余ease-off为
[pi*-p((u,θ,φi),x)]·n((u,θ,φi),x)=hi (6)
由于齿面点数目远大于加工参数数目,即m>n, 则求解的n个为指标量和没有求解的m-n个未知变量是相互依赖的,即使他们共同构成了所求齿面的参数化表达。综上所述,加工参数反调实际上就是残余ease-off的非线性最小化过程。此处,区别于以往误差齿面的一阶或者二阶组成,残余ease-off齿面形貌h(x)的高阶组成将以高阶多项式形式进行参数化表达。因此,传统的只考虑几何性能优化的反调可拓展为高阶形式,构成了螺旋锥齿轮高阶加工参数反调方法。则其目标函数可以表示为:
式中, 表示认为预设的齿面ease-off要求的精度阈值。这是一个具有无法避免的病态问题的超定方程组。针对该方程组的求解,目前主要有三类方法:i)单步法;ii)迭代法;iii)含控制步长的迭代法。
i.3)精确非线性最小二乘鲁棒性算法
对于方程(7),其目标函数可转化为:
其求解主要考虑非线性造成的两个问题:i)加工参数的之间的耦合作用;ii)雅克比矩阵的病态问题。
首先,计算目标函数F(x)的偏导,ease-off齿面形貌具有高阶特性,则函数f具有连续二阶偏导,其泰勒展开式为
f(x+d)=f((u,θ,φi),x)+J((u,θ,φi),x)d+O(||d||
式中J∈R
而雅克比矩阵的病态问题和齿面加工参数之间的耦合作用也密切相关,对于函数 方程(8)的一阶计算公式为
在该非线性方程求解中,迭代过程十分复杂,不得不对迭代步进行优化规划;这样,目标函数F(x)的梯度为
F′(x):→F′(x)=F′((u,θ,φi),x)=J((u,θ,φi),x)
在迭代中,也需要计算F(x)的海森矩阵,则在(j,k)处的单元为
有
在加工参数高阶反调中,最终的输出结果是确定含有反调量的精确的加工参数x*:=((u,θ,φi),x),从而实现参数驱动设计齿面并达到与目标齿面精确匹配的目的。
总结近些年来的研究可得,含迭代补偿控制策略的非线性迭代算法是求解上述目标函数的主流算法。所以,具体的求解首先需要回到非线性最小二乘的范畴,其中G-N(高斯-牛顿)迭代算法和L-M(列格博文-马夸尔特)算法是最常见的两种方法。G-N算法是基于函数f在精确值x附近的线性逼近:对于较小的迭代步||d||,进行泰勒展开有
则G-N迭代步长为
得
但 Jk具有奇异性时,该迭代方向是没有意义的;当 较大时,它靠近奇异点。这样,L-M算法对该迭代步进行进一步的改进为
改变阻尼系数μk,能够有效地处理矩阵的秩序缺陷和雅克比矩阵的病态问题。所以,L-M算法的一个关键问题就变成了如何通过选择μk来控制迭代步。这需要在每一个迭代步修正信赖域半径的反调策略,且L-M算法属于信赖域算法的范畴,这样最后的问题变成了怎样求解关于信赖域的子问题。根据相关引理,有下列方程
螺旋锥齿轮形性协同加工参数混合反调修正方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0