










专利摘要
一种汽车主动悬架系统的多目标控制方法,本发明涉及一种控制方法,具体涉及一种汽车主动悬架系统的多目标控制方法。本发明是为解决现有悬架控制技术设计模型较为简单,无法满足悬架系统的多目标控制性能,无法应对外界不确定参数对系统控制性能的影响,而提供了一种汽车主动悬架系统的多目标控制方法。汽车主动悬架系统的多目标控制方法按以下步骤实现:步骤一、建立非线性不确定四分之一主动悬架系统模型;步骤二、推导自适应反步递推控制器;步骤三、调节自适应反步递推控制器的控制增益参数。本发明应用于汽车主动悬架控制领域。
权利要求
1.一种汽车主动悬架系统的多目标控制方法,其特征在于汽车主动悬架系统的多目标控制方法按以下步骤实现:
步骤一、建立非线性不确定四分之一主动悬架系统模型;
步骤二、推导自适应反步递推控制器;
步骤三、调节自适应反步递推控制器的控制增益参数,即完成了汽车主动悬架系统的多目标控制方法。
2.根据权利要求1所述的一种汽车主动悬架系统的多目标控制方法,其特征在于步骤一中所述建立非线性不确定四分之一主动悬架系统模型具体为:
根据牛顿第二定律,四分之一主动悬架系统的动态方程可表示为:
式(1)中的非线性刚性弹力和分段线性阻尼服从一下关系式:
Ft(zu,zr,t)=kf(zu-zr) (5)
公式(1)~(6)中ms为簧上质量,代表汽车车身质量,mu为簧下质量,代表机轮组件的质量,Fs和Fd分别代表弹簧产生的弹力和阻尼力,Ft和Fb表示轮胎的弹性力和阻尼力,zs和zu分别代表簧上和簧下质量块的位移,zr是路面的扰动位移输入,u代表主动悬架系统的输入力,ks和ksn分别代表弹簧组件的线性刚度系数和非线性刚度系数,be和bc分别代表弹簧组件的阻尼器的伸长和压缩阻尼系数,kf和bf分别代表轮胎的刚性和阻尼系数,t代表自然时间参数;
在控制器设计过程中,由于车身质量ms通常随着车身载重和乘坐人数的变化进而发生改变,因此质量ms实际上是不确定参数;
定义状态变量 那么式(1)、(2)中的动态方程可以改写 成如下的状态空间形式:
其中 是个不确定参数,因为ms=[msmin msmax]经常随着车身负载而改变;即完成了四分之一主动悬架系统的数学模型的建立。
3.根据权利要求1所述的一种汽车主动悬架系统的多目标控制方法,其特征在于步骤二中所述设计自适应反步递推控制器包括以下四个部分:
(一)、设计虚拟控制函数α,使得跟踪误差e1=x1-x1r尽可能小,其中x1r是参考轨迹信号,结合式(7)、(8),可以得到
选择x2作为误差动态(13)的虚拟控制输入,其理想函数为α,定义e2作为实际状态x2同虚拟输入x2之间的误差,即e2=x2-α,则公式(13)可以重写为
状态x1需要满足|x1|<δ1其中δ1是一个正常数,满足δ1>ε0,考虑备选Lyapunov函数 其中△1=δ1-ε0.对V1求导,可以得到
如果选择虚拟控制函数α如 其中k1是一个正常数,那么V1的导数可以重新写为 如果e2=0,那么 就可以确保e1是渐进趋于零的;
(二)、设计自适应反步控制率u,使得即使系统中存在不确定参数θ的情况下,状态x2仍能够跟踪期望的虚拟控制输入α;对动态误差信号e2=x2-α求导,得到 其中 定义 作为估计误差,其中 是θ的估计;因为并不需要限制误差信号e2的速率,所以只需要选择如下的备选Lyapunov函数 V对时间的导数为
如果选择的控制率 其中k2是一个正常数,那么有 给定自适应控制率 能得到 两边对其从0到t积分 可以推出V(t)≤V(0);从而可以进一步推出e1,e2和 是有界的,获得 和 是有界的,可以导出 是有界的, 是一致连续的,根据Lyapunov-like引理,随着t→∞, 那么e1和e2将会渐进趋于零;
(三)确保系统的零动态稳定
自适应反步递推设计是一个二阶的误差动态,而实际的系统是一个四阶的系统,所以零动态包含两个状态,为了找到零动态系统,设定e1=0, 因此,得到
如果用公式(14)中的u来替换 中的,就可以得到如下的零动态方程:
其中
定义正定的函数V0=xTPx,其中P>0是一个正定的矩阵,有
证明矩阵A的特征值具有负实部,因此,定义ATP+PA=-Q,其中Q>0是一个正定矩阵, 其中η是一个调整正值,可以得到如下的不等式
通过合适的选择矩阵P,Q和调整值η,能确保 其中q1是一个正数,假设 那么
Lyapunov函数(15)是有界的
其中 那么可以得到
(四)选择调整参数确保满足性能的约束
通过分析中得到所有的信号都是在已知的界限范围内,那么悬架行程的界限可以得到如下的形式
如果调整参数δ1,q和矩阵P,能得到不等式
得到保证,可以保证|x1-x3|≤zmax
胎压的动载可以估计成
如果调整初始值和调整参数,使它们满足
那么|Ft+Fb|≤(ms+mu)g就能得到保证。
4.根据权利要求1所述的一种汽车主动悬架系统的多目标控制方法,其特征在于步骤 二中为了达到系统按照预定的时间和轨迹达到稳定,设计一个衰减的多项式作为参考轨迹,具体为
规划一种特殊的多项式作为参考轨迹来代替零参考轨线,同时,通过预设时间来调节车身垂直加速度使其达到较低或者较高的水平;
其中系数向量ai,i=0,1,2,3,4满足如下的形式
xr(0)=a0=x1(0)
(16)式可以保证:
1)跟踪误差及其一阶导数的初值是零,也就是
2)向量xr(t)是二阶可导的,也就是xr(t)∈C2.
进而,从式(16)中可以看到,在预定的时间Tr内,xr(t)=0和 都能够达到零值。
5.根据权利要求1所述的一种汽车主动悬架系统的多目标控制方法,其特征在于步骤三中在系统遭受参数不确定性以外的扰动时,调节增益k1,k2保证跟踪误差e1是有界的;
同时,如果经过有限时间,系统仅遭受参数不确定性,则跟踪误差e1在有限时间收敛于零。
说明书
技术领域
本发明涉及一种控制方法,具体涉及一种汽车主动悬架系统的多目标控制方法。
背景技术
随着汽车工业的发展,汽车主动悬架系统引起了众多研究者的注意,人们致力于提高乘坐的舒适度和驾驶的可操控性。使用先进的传感器和微执行器来实时的获取道路的信息,主动悬架系统已经具备对变化的路面条件而连续的调整自己的能力。主动悬架系统不仅包括支撑车身重量的功能,而且它还承担隔离驾乘人员由于路面不平引起的车体振动、最大程度上使轮胎和路面接触以确保车辆行驶的安全性。
在主动悬架系统中,通过执行机构放置在车体与车架之间,来达到系统振动能量的耗散、稳定车体的垂直动态和提高驾乘人员的舒适度的要求。然而,主动悬架控制系统是典型的多目标控制系统。总的说来,汽车主动悬架系统的性能要求主要包括:1)驾乘的舒适度:极可能的隔离路面传递到人体的冲击和振动,以达到乘坐的舒适性;2)接地性:对驾车的安全性产生影响;3)悬架行程的限制:由于机械结构的限制,悬架行程有一定的运动范围。然而,这些性能通常是互相冲突的,所以对这些性能要求需要一定的折中考虑。
为了消除这些性能之间的冲突,很多悬架系统的多目标控制已经被提出。传统方法在处理悬架系统的多目标控制问题时,可能会导致系统性能的降级,甚至造成悬架系统性能的不稳定。现有的方法的不足之处主要存在以下方面:
一、较为简单的设计模型。在现有的主动悬架系统的研究中,为了方便悬架系统的分析与设计,经常采用线性化的数学模型。主要理想化了弹簧元件、执行器和阻尼器的数学模型,得到近似线性化的模型。然而,在实际中,汽车主动悬架系统为典型的非线性系统,理想化的近似会导致控制精度的降低;
二、无法满足汽车悬架系统的多目标控制。对于汽车悬架系统而言,保证控制系统的稳定性是不够的,还需要考虑系统的其他性能优化指标。另外,传统的方法没有比较明确的理论来指导系统控制参数的选取。因为悬架系统的优化指标之间存在着相互冲突,给系统控制参数的选取带来了很大的困难;
三、无法应对外界不确定性参数的影响。在汽车主动悬架控制中,因为乘客的数量和载荷发生改变时,车辆的负载很容易发生变化,汽车的质量参数也相应的发生变化,这种不可避免的参数不确定性将给控制的设计带来困难,而传统的控制策略往往会存在一定的局限性。
发明内容
本发明是为解决现有悬架控制技术设计模型较为简单,无法满足悬架系统的多目标控制性能,无法应对外界不确定参数对系统控制性能的影响,而提供了一种汽车主动悬架系统的多目标控制方法。
汽车主动悬架系统的多目标控制方法按以下步骤实现:
步骤一、建立非线性不确定四分之一主动悬架系统模型;
步骤二、推导自适应反步递推控制器;
步骤三、调节自适应反步递推控制器的控制增益参数。
发明效果:
本发明提出一种悬架系统多目标控制方法,考虑到实际车辆中存在负载参数的不确定性和行驶过程中车身的垂直动态响应,提出了多目标自适应反步递推控制方法,提高了驾驶的舒适度,并且保证了悬架行程系统和车辆行驶安全中所需要满足的性能约束,解决了非线性不确定四分之一主动悬架系统的垂直动态的镇定问题。
本发明考虑到系统参数中存在的负载不确定性情况,对四分之一主动悬架系统建立了数学模型。从模型中可以看出四分之一主动悬架系统为典型的不确定系统,为了满足悬架控制系统的约束条件和提高驾驶的舒适度,本发明提出了一种使用界限Lyapunov函数的方法,来处理约束问题的自适应反步递推控制器,即使系统存在参数不确定的情况下,车身的垂直位移也能够在有限的时间内趋于零,系统达到稳定状态,并且通过设计光滑的轨迹轨线,可以预先设计稳定的时间,同时悬架的行程和车辆行驶的安全性能的约束条件都能够在控制器的设计中得到保证,从而实现了多目标控制的目的,最后从仿真中验证了所设计控制器的有效性,达到了预期的设计目的。
附图说明
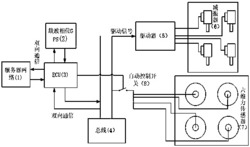
图1是本发明流程图;
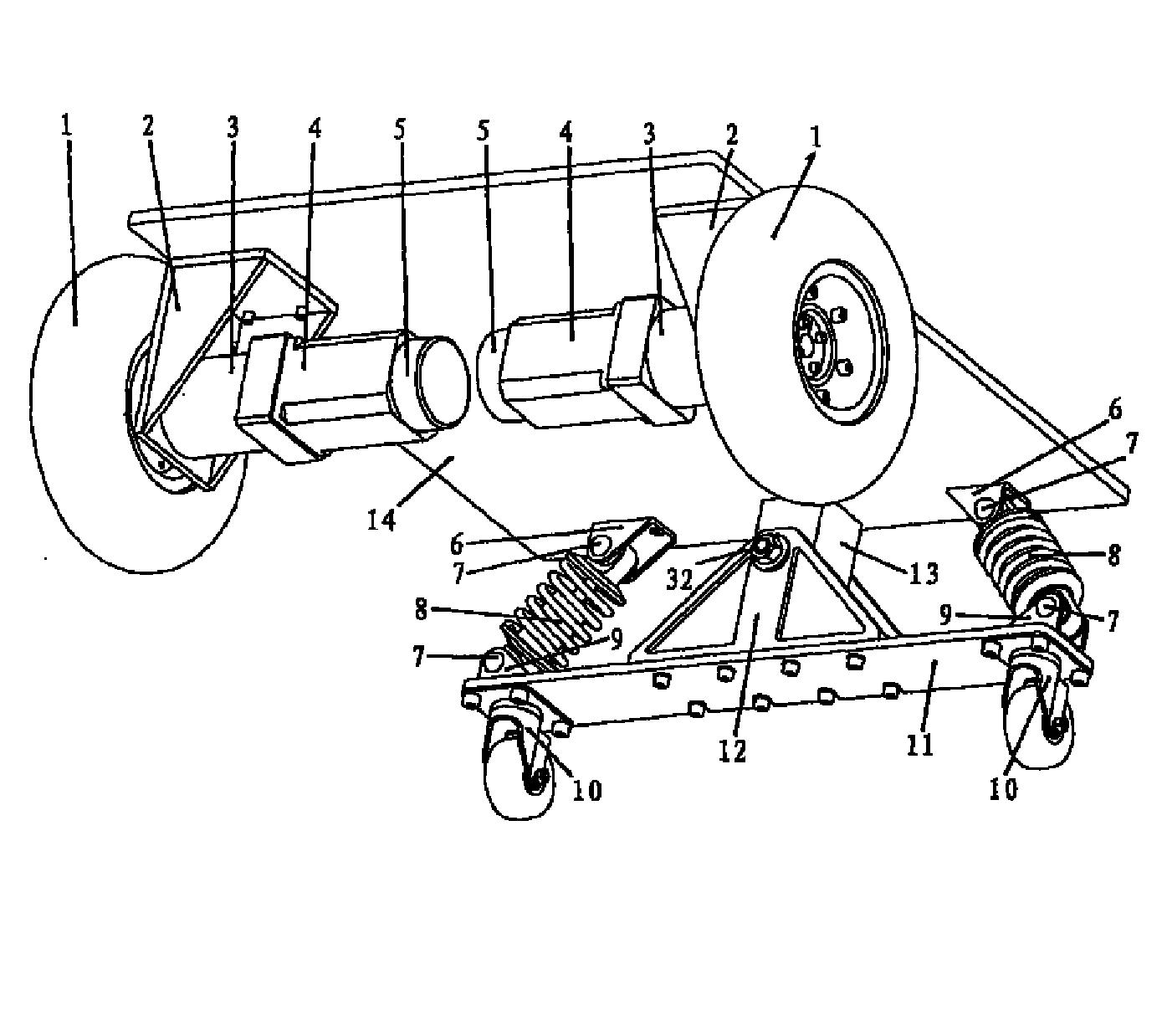
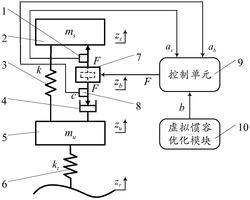
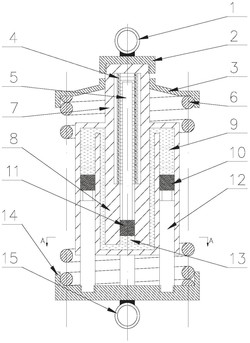
图2是四分之一悬架系统的模型图;
图3是车身垂直位移随时间的响应曲线; 表示Tr=0.5, 表示Tr=1.0, 表示Tr=2.0;
图4是跟踪误差e1响应曲线; 表示Tr=0.5, 表示Tr=1.0, 表示Tr=2.0;
图5是汽车悬架垂直加速度响应曲线; 表示Tr=0.5, 表示Tr=1.0, 表示Tr=2.0;
图6是悬架动载于静载的比率响应曲线; 表示Tr=0.5, 表示Tr=1.0, 表示Tr=2.0;
图7是悬架行程响应曲线; 表示Tr=0.5, 表示Tr=1.0, 表示Tr=2.0;
图8是控制器控制输入响应曲线; 表示Tr=0.5, 表示Tr=1.0, 表示Tr=2.0。
具体实施方式
具体实施方式一:结合图2说明本实施方式,本实施方式的汽车主动悬架系统的多目标控制方法按以下步骤实现:
步骤一、建立非线性不确定四分之一主动悬架系统模型;
步骤二、推导自适应反步递推控制器;
步骤三、调节自适应反步递推控制器的控制增益参数。
图2中主动悬架系统的具体参数如下:车身质量:ms=600kg;车身质量最大值:msmax=700kg;车身质量最小值:msmin=550kg;机轮组件质量:mu=60kg;弹簧组件的线性刚度系数:ks=18000N/m;弹簧组件的非线性刚度系数: 弹簧组件阻尼器的伸长阻尼系数:be=2500Ns/m;弹簧组件阻尼器的压缩阻尼系数:bc=2200Ns/m;轮胎的刚性系数:kf=200000N/m;轮胎的阻尼系数:bf=1000Ns/m;车辆向前行驶速度:Vs=45km/h;
控制律参数选取:系统初值状态集合x1(0)=6cm,xi(0)=0cm,i=2,…,4,θ(0)=1/550,控制器增益参数k1=k2=100,自适应增益参数γθ=0.001,正常数△1=0.05,δ1=0.08。
控制律作用效果:
车辆行驶过程中,主要的路面扰动是包块型路面扰动。这种震动路面输入也是验证悬架系统设计性能经常采取的扰动输入形式。通常情况下包块路面输入可以看做一种振动输入,它是一种短时间聚集大幅度的离散事件,例如光滑的路面上的一个凹陷处或者是凸起处。选取包块路面扰动输入的函数为:
其中其中a,l是包块输入的高度和长度,Vs是汽车行驶速度。这里,假设a=0.1m和l=5m。
从图3可以看出,系统的垂直响应可以再预设的时间内达到稳定。从图4中可以看出对于不同的预定时间Tr,主动悬架系统的跟踪误差也是不同的,预定时间越小,跟踪误差越大。另外,过小的Tr可能导致很大的车身垂直加速度,从图5中可以看到。图6可以确保车轮的不间断接地性,因为车轮的动载一直小于车轮的静载。而且,从图7中可以看到,悬架动行程的运动在可接受的zmax=0.15m范围之内。图8是自适应控制器的实际控制输入。可以看出,本发明可以很好的控制车身系统的垂直位移,并且可以再预设的时间内达到稳定,大大的改善了驾驶的舒适度。
本实施方式效果:
本实施方式提出一种悬架系统多目标控制方法,考虑到实际车辆中存在负载参数的不确定性和行驶过程中车身的垂直动态响应,提出了多目标自适应反步递推控制器的设计方法,提高了驾驶的舒适度,并且保证了悬架行程系统和车辆行驶安全中所需要满足的性能约束,解决了非线性不确定四分之一主动悬架系统的垂直动态的镇定问题。
本实施方式考虑到系统参数中存在的负载不确定性情况,对四分之一主动悬架系统建立了数学模型。从模型中可以看出四分之一主动悬架系统为典型的不确定系统,为了满足悬架控制系统的约束条件和提高驾驶的舒适度,本发明提出了一种使用界限Lyapunov函数的方法,来处理约束问题的自适应反步递推控制器,即使系统存在参数不确定的情况下,车身的垂直位移也能够在有限的时间内趋于零,系统达到稳定状态,并且通过设计光滑的轨迹轨线,可以预先设计稳定的时间,同时悬架的行程和车辆行驶的安全性能的约束条件都能够在控制器的设计中得到保证,从而实现了多目标控制的目的,最后从仿真中验证了所设计控制器的有效性,达到了预期的设计目的。
具体实施方式二:本实施方式与具体实施方式一不同的是:步骤一中所述建立非线性不确定四分之一主动悬架系统模型具体为:
根据牛顿第二定律,四分之一主动悬架系统的动态方程可表示为:
式(1)中的非线性刚性弹力和分段线性阻尼服从一下关系式:
Ft(zu,zr,t)=kf(zu-zr) (5)
公式(1)~(6)中ms为簧上质量,代表汽车车身质量,mu为簧下质量,代表机轮组件的质量,Fs和Fd分别代表弹簧产生的弹力和阻尼力,Ft和Fb表示轮胎的弹性力和阻尼力,zs和zu分别代表簧上和簧下质量块的位移,zr是路面的扰动位移输入,u代表主动悬架系统的输入力,ks和ksn分别代表弹簧组件的线性刚度系数和非线性刚度系数,be和bc分别代表弹簧组件的阻尼器的伸长和压缩阻尼系数,kf和bf分别代表轮胎的刚性和阻尼系数。在控制器设计过程中,由于车身质量ms通常随着车身载重和乘坐人数的变化进而发生改变,因此质量ms实际上是不确定参数。
定义状态变量 那么式(1)、(2)中的动态方程可以改写成如下的状态空间形式:
其中 是个不确定参数,因为ms=[msmin msmax]经常随着车身负载而改变。
对于主动悬架系统而言,控制器设计中的设计目标要求主要有三方面。
1)驾驶的舒适度:在主动系统设计中,主要的任务是提高驾驶的舒适度,也就是存在参数不确定性和扰动的情况下,设计一个控制器,来稳定车身的垂直运动和隔离路面不平传递给驾乘人员身上的冲击力;
2)行驶安全性:为了确保汽车行驶的安全性,车轮应该保证不间断的接触地面,车轮的动载应该尽量的小,轮胎的动载不能超过其静载,也就是
|Ft+Fb|<(msmin+mu)g (11)
3)悬架行程限制:因为机械结构的限制,悬架系统的运动范围不能达到允许的最大值,可以描述为
|zs-zu|≤zmax (12)
其中zmax是悬架系统的最大形变量。
根据上述的分析,主动悬架系统控制问题总结如下:
对于四分之一主动悬架系统(7)~(10),设计自适应控制输入u,使得闭环系统即使存在不确定参数的情况下,依然可以保证:
1)车身垂直位移在有限时间内收敛于零,即
2)悬架系统所需保证的约束(车辆行驶安全约束(11)、悬架行程限制(12))可以在全部时间域内得到保证。
即完成了四分之一主动悬架系统的数学模型的建立。其它步骤及参数与具体实施方式一相同。
具体实施方式三:本实施方式与具体实施方式一或二不同的是:步骤二中所述设计自适应反步递推控制器包括以下五个部分:
(一)、设计虚拟控制函数α,使得跟踪误差e1=x1-x1r尽可能小,其中x1r是参考轨迹信号。结合式(7)、(8),可以得到
选择x2作为误差动态(13)的虚拟控制输入,其理想函数为α,定义e2作为实际状态x2同虚拟输入x2之间的误差,即e2=x2-α,则公式(13)可以重写为
在这一步中,主要目标是设计一个虚拟控制率α,使得跟踪轨迹误差e1尽可能的小,同时,要满足悬架行程的约束,也就是状态x1需要满足|x1|<δ1其中δ1是一个正常数,满足δ1>ε0,考虑备选Lyapunov函数 其中△1=δ1-ε0.对V1求导,可以得到
如果选择虚拟控制函数α如 其中k1是一个正常数,那么V1的导数可以重新写为 这样,就可以清晰的看到,如果e2=0,那么 就可以确保e1是渐进趋于零的。
(二)、设计自适应反步控制率u,使得即使系统中存在不确定参数θ的情况下,状态x2仍能够跟踪期望的虚拟控制输入α。对动态误差信号e2=x2-α求导,得到
如果选择的控制率
(三)确保系统的零动态稳定。
自适应反步递推设计是一个二阶的误差动态,然而实际的系统是一个四阶的系统。所以零动态包含两个状态。为了找到零动态系统,设定e1=0, 因此,得到
如果用公式(14)中的u来替换 中的,就可以得到如下的零动态方程:
定义正定的函数V0=xTPx,其中P>0是一个正定的矩阵,有
很容易的证明矩阵A的特征值具有负实部。因此,定义ATP+PA=-Q,其中Q>0是一个正定矩阵,注意到 其中η是一个调整正值,那么可以得到如下的不等式
通过合适的选择矩阵P,Q和调整值η,能确保 其中q1是一个正数。假设ηwTw≤q2,那么
可以看出,Lyapunov函数(15)是有界的
其中
(四)选择调整参数确保满足性能的约束。
从以上分析中可以知道,所有的信号都是在已知的界限范围内,那么悬架行程的界限可以得到如下的形式
可以很清晰的看到,如果调整参数δ1,q和矩阵P,能得到不等式
得到保证,可以保证|x1-x3|≤zmax。
胎压的动载可以估计成
如果调整初始值和调整参数,使它们满足
一种汽车主动悬架系统的多目标控制方法专利购买费用说明
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
![]()











动态评分
0.0