





专利摘要
本发明一种仿生柔性扑翼机构的水动力性能测试方法,属于仿生测试领域;本发明的仿生柔性扑翼采用naca翼型,材质为硅胶。所述仿生柔性扑翼机构的水动力性能测试方法,采用水动力性能测试装置包括仿生柔性扑翼运动推进平台、仿生柔性扑翼和PIV测试系统;本发明中仿生柔性扑翼水动力性能测试方法可以测试出仿生柔性扑翼的能量转换效率、扭矩系数及推力系数等衡量仿生柔性扑翼性能优劣的关键参数,既可以为仿生柔性扑翼工程样机设计提供参考,又可以为仿生柔性扑翼水动力性能CFD数值模拟和理论研究提供实验依据。
权利要求
1.一种仿生柔性扑翼机构的水动力性能测试方法,其特征在于:所述仿生柔性扑翼机构包括所述扑翼机构为仿生柔性扑翼,采用naca翼型,材质为硅胶;
所述扑翼机构采用硫化模具制备而成,所述硫化模具包括上模具和下模具,所述上模具和下模具之间为可拆卸固定连接;所述上模具、下模具合体后的内型和所述扑翼机构的外型一致;
所述水动力性能测试方法使用的测试装置包括仿生柔性扑翼运动推进平台、仿生柔性扑翼和PIV测试系统;仿生柔性扑翼运动推进平台用于实现仿生柔性扑翼的运动和仿生柔性扑翼在推进方向的自由移动;所述仿生柔性扑翼运动推进平台包含六轴力/力矩传感器,能够在控制运动的同时还能记录下仿生柔性扑翼各方向的受力情况;所述PIV测试系统包括连续激光器和高速相机;
所述水动力性能测试方法具体步骤如下:
步骤一:实验标定,在进行仿生柔性扑翼各方向力/力矩的测定时,需要将仿生柔性扑翼的前进正方向同所述六轴力/力矩传感器的X方向进行标定;
步骤二:将所述仿生柔性扑翼及六轴力/力矩传感器通过联轴器安装在仿生柔性扑翼运动推进平台下方,安装完毕后对六轴力/力矩传感器进行归零处理;
步骤三:启动仿生柔性扑翼运动推进平台,确保推进平台在推进方向上稳定运动;
步骤四:通过控制软件,首先设定仿生柔性扑翼的运动参数:平动位移幅值为5mm至25mm,转动角度幅值为20°,转动频率1Hz、1.5Hz、2Hz;然后由雷诺数公式计算:Re=fc
步骤五:设定仿生柔性扑翼水平平动初始相位比旋转运动初始相位滞后90°,用以保证两种运动的合成运动方向沿轴线方向;若要实现对鱼类胸鳍和尾鳍协同运动的模拟,两组仿生柔性扑翼自身的运动参数与步骤四中所有参数相同,但两组仿生柔性扑翼之间所有运动需存在140°相位差;然后测量不同运动参数下的仿生柔性扑翼各方向的力及力矩,并通过六轴力/力矩传感器记录软件将力学数据存储和导出;
步骤六:利用高速相机对不同运动参数下的仿生柔性扑翼的运动轨迹进行拍摄,并将视频文件存储和导出;
步骤七:利用PIV测试系统对不同运动参数下的仿生柔性扑翼的流场情况进行拍摄,并将视频文件存储和导出;
步骤八:测试并记录下仿生柔性扑翼在不同运动参数下运动时整个实验平台的移动速度;
步骤九:完成一组仿生扑翼在不同运动参数下所有实验后,关闭所有实验设备。
2.根据权利要求1所述仿生柔性扑翼机构的水动力性能测试方法,其特征在于:所述仿生柔性扑翼运动推进平台包括运动模块、气浮导轨和气浮导轨支架;所述气浮导轨支架用于支撑整个试验平台,其两端平行固定有两个气浮导轨;所述运动模块的两端分别和两个气浮导轨滑动连接,用于实现仿生扑翼的水平平动以及转动;所述运动模块包括横向电机和旋转电机,用来控制夹持扑翼的水平平动以及转动,所述旋转电机的输出轴安装有六轴力/力矩传感器,用于控制运动的同时还能记录下扑翼各方向的受力情况。
说明书
技术领域
本发明属于仿生测试领域,具体涉及一种仿生柔性扑翼机构及水动力性能测试方法。
背景技术
随着人们对海洋生物研究的加深,仿生柔性扑翼推进由于其具有推进效率高、灵活性好、隐蔽性强等特点引起了人们的广泛关注。实验作为一种有效的研究手段,在对柔性扑翼推进的水动力特性研究中起着至关重要的作用。但是,现有的水动力测试方法主要是针对船舶或者水下航行器等刚形体的水动力特性进行设计。由于与船舶等实验对象存在较大的差异,现有的水动力测试方法并不能直接移植到仿生柔性扑翼的水动力测试中来。本发明所述的一种仿生柔性扑翼机构及水动力性能测试方法,提供了制作仿生柔性扑翼的材料及制作模具,同时提供了一种用来测试柔性扑翼相关水动力参数的方法。具体来说,使用柔性材料实现对运动生物的模拟,并且可以测量出仿生柔性扑翼运动过程中的能量转化效率、扭矩系数、推力系数等一系列衡量水动力特性的关键参数,从而为仿生扑翼工程样机的设计提供参考,也可以为仿生扑翼水动力性能的CFD数值模拟和理论研究提供实验验证。
发明内容
要解决的技术问题:
为了避免现有技术的不足之处,本发明提出一种仿生柔性扑翼机构及水动力性能测试方法,可以测出仿生扑翼运动时的能量转换效率、扭矩系数及推力系数等衡量仿生扑翼性能优劣的关键参数的仿生扑翼水动力性能测试方法。
本发明的技术方案是:一种仿生柔性扑翼机构,其特征在于:所述扑翼机构为仿生柔性扑翼,采用naca翼型,材质为硅胶。
本发明的进一步技术方案是:所述扑翼机构采用硫化模具制备而成,所述硫化模具包括上模具和下模具,所述上模具和下模具之间为可拆卸固定连接;所述上模具、下模具合体后的内型和所述扑翼机构的外型一致。
一种仿生柔性扑翼机构的水动力性能测试方法,其特征在于:
所述水动力性能测试方法使用的测试装置包括仿生柔性扑翼运动推进平台、仿生柔性扑翼和PIV测试系统;仿生柔性扑翼运动推进平台用于实现仿生柔性扑翼的运动和仿生柔性扑翼在推进方向的自由移动;所述仿生柔性扑翼运动推进平台包含六轴力/力矩传感器,能够在控制运动的同时还能记录下仿生柔性扑翼各方向的受力情况;所述PIV测试系统包括连续激光器和高速相机;
所述水动力性能测试方法具体步骤如下:
步骤一:实验标定,在进行仿生柔性扑翼各方向力/力矩的测定时,需要将仿生柔性扑翼的前进正方向同所述六轴力/力矩传感器的X方向进行标定;
步骤二:将所述仿生柔性扑翼及六轴力/力矩传感器通过联轴器安装在仿生柔性扑翼运动推进平台下方,安装完毕后对六轴力/力矩传感器进行归零处理;
步骤三:启动仿生柔性扑翼运动推进平台,确保推进平台在推进方向上稳定运动;
步骤四:通过控制软件,首先设定仿生柔性扑翼的运动参数:平动位移幅值为5mm至25mm,转动角度幅值为20°,转动频率1Hz、1.5Hz、2Hz;然后由雷诺数公式计算:Re=fc
步骤五:设定仿生柔性扑翼水平平动初始相位比旋转运动初始相位滞后90°,用以保证两种运动的合成运动方向沿轴线方向;若要实现对鱼类胸鳍和尾鳍协同运动的模拟,两组仿生柔性扑翼自身的运动参数与步骤四中所有参数相同,但两组仿生柔性扑翼之间所有运动需存在140°相位差;然后测量不同运动参数下的仿生柔性扑翼各方向的力及力矩,并通过六轴力/力矩传感器记录软件将力学数据存储和导出;
步骤六:利用高速相机对不同运动参数下的仿生柔性扑翼的运动轨迹进行拍摄,并将视频文件存储和导出;
步骤七:利用piv系统对不同运动参数下的仿生柔性扑翼的流场情况进行拍摄,并将视频文件存储和导出;
步骤八:测试并记录下仿生柔性扑翼在不同运动参数下运动时整个实验平台的移动速度;
步骤九:完成一组仿生扑翼在不同运动参数下所有实验后,关闭所有实验设备。
本发明的进一步技术方案是:所述仿生柔性扑翼运动推进平台包括运动模块、气浮导轨和气浮导轨支架;所述气浮导轨支架用于支撑整个试验平台,其两端平行固定有两个气浮导轨;所述运动模块的两端分别和两个气浮导轨滑动连接,用于实现仿生扑翼的水平平动以及转动;所述运动模块包括横向电机和旋转电机,用来控制夹持扑翼的水平平动以及转动,所述旋转电机的输出轴安装有六轴力/力矩传感器,用于控制运动的同时还能记录下扑翼各方向的受力情况。
有益效果
本发明的有益效果在于:本发明中仿生柔性扑翼水动力性能测试方法可以测试出仿生柔性扑翼的能量转换效率、扭矩系数及推力系数等衡量仿生柔性扑翼性能优劣的关键参数,既可以为仿生柔性扑翼工程样机设计提供参考,又可以为仿生柔性扑翼水动力性能CFD数值模拟和理论研究提供实验依据。
附图说明
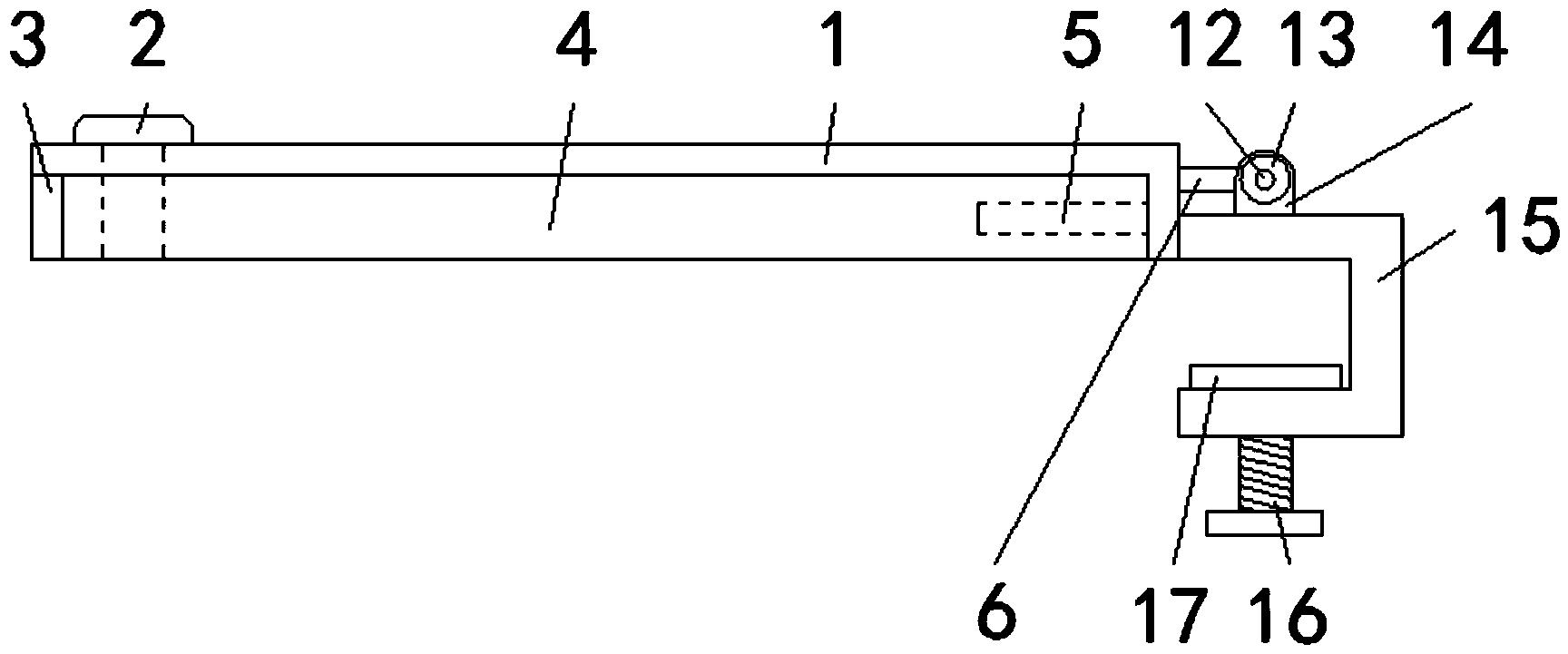
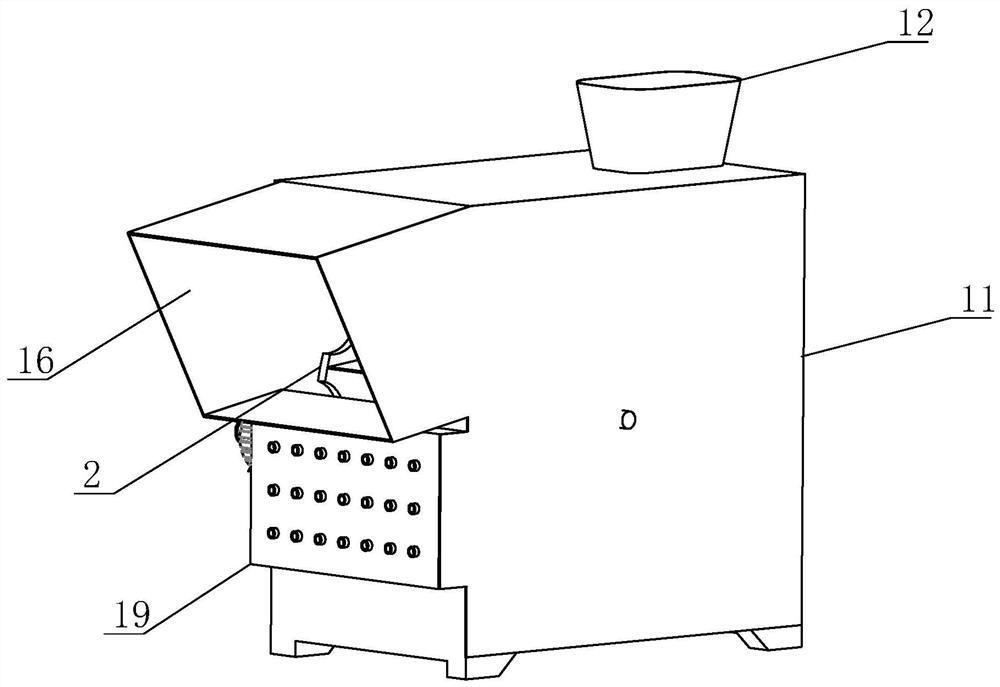
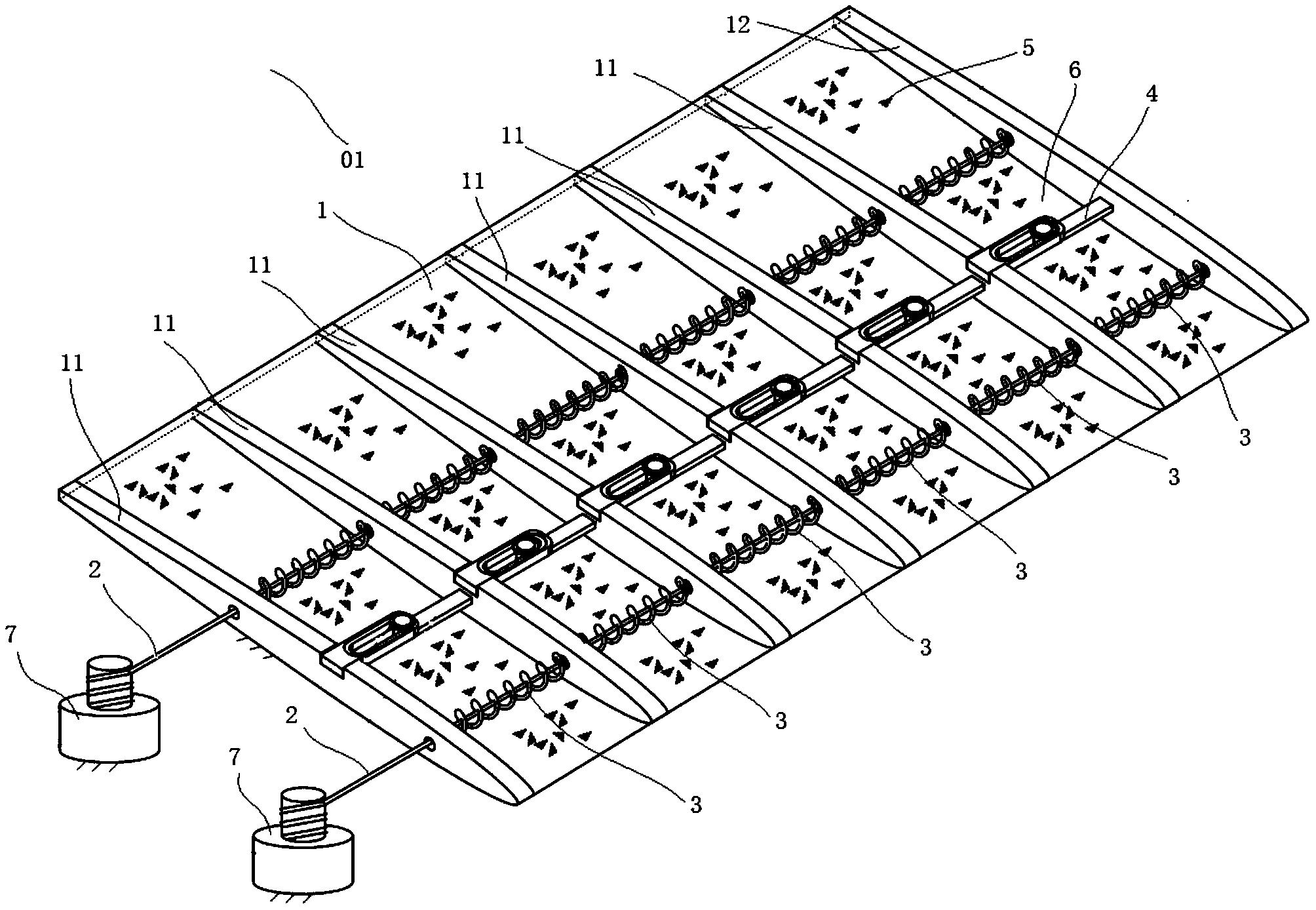
图1为实验设备摆放示意图;
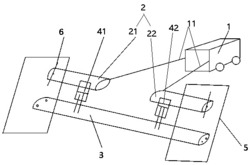
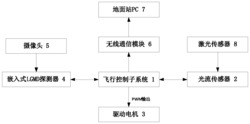
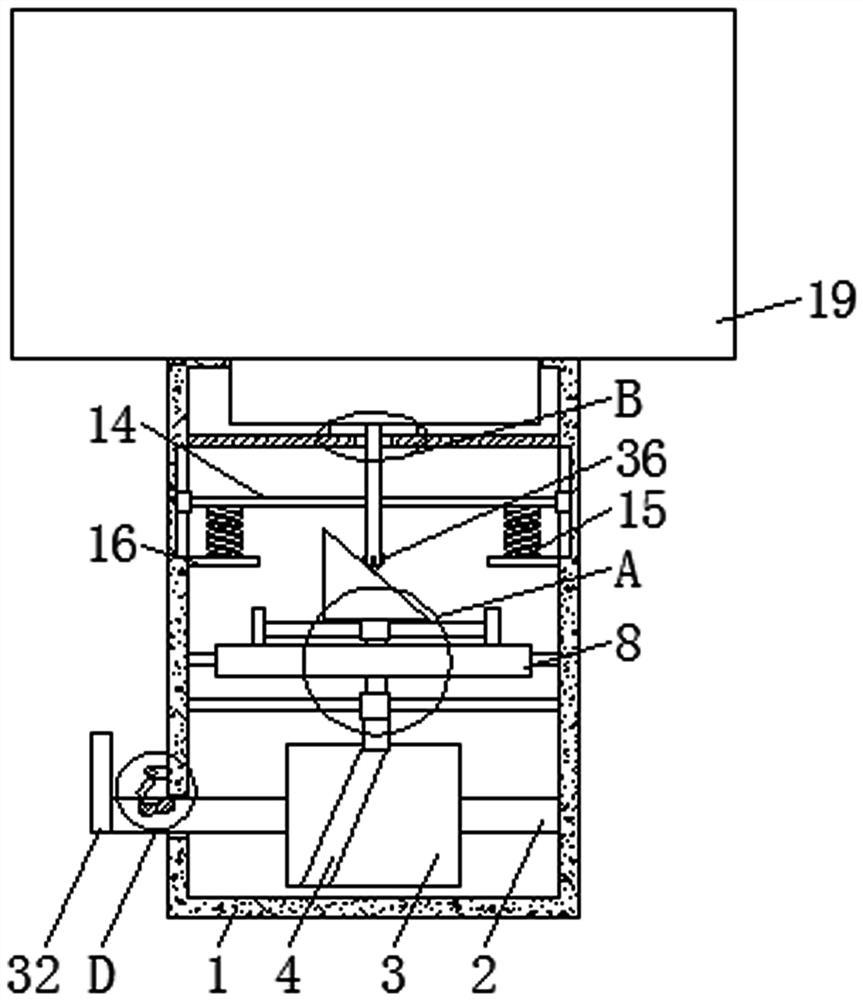
图2为仿生柔性扑翼模具图;
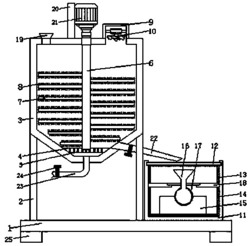
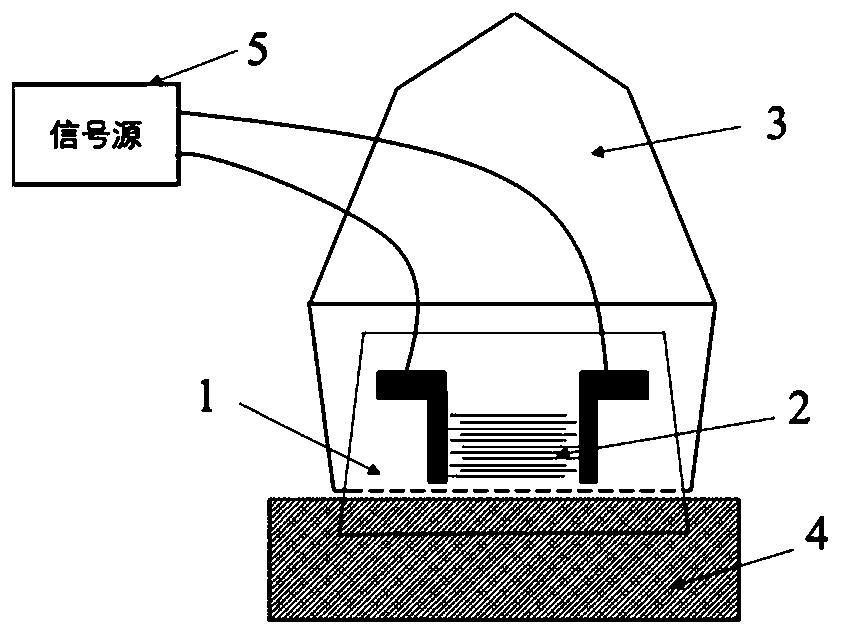
图3为一种仿生柔性扑翼模型;
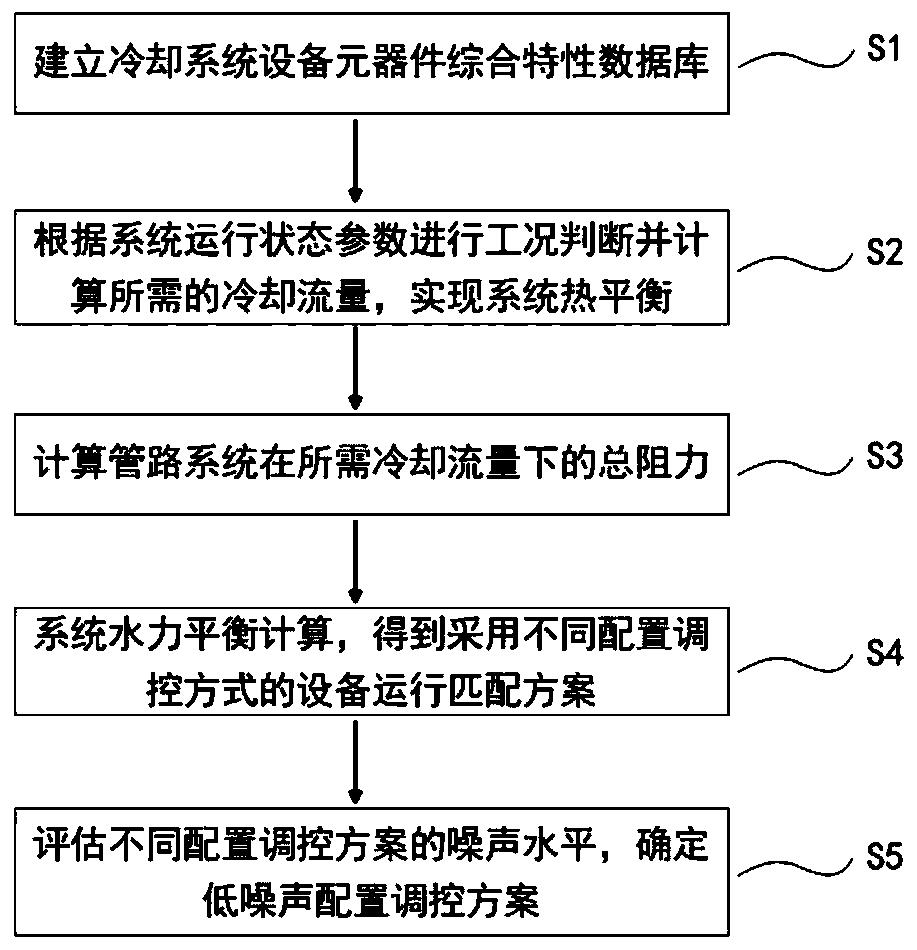
图4为测试流程图。
附图标记说明:1-仿生柔性扑翼运动推进平台,2-静止水槽,3-传感器,4-联轴器,5-高速相机,6-连续激光器,7-扑翼连接轴,8-仿生柔性扑翼。
具体实施方式
下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
图1为本发明中测试方法所基于的仿生柔性扑翼推进试验平台,其中仿生柔性扑翼的运动由仿生柔性扑翼运动推进平台1实现,它既能实现仿生扑翼在静止水槽2中的仿鱼类运动,同时允许仿生扑翼在推进方向自由进给运动;仿生扑翼的力及力矩由传感器3测量并记录,仿生扑翼的运动轨迹由高速相机4拍摄并记录;仿生扑翼的流场特性由通过高速相机4和连续激光器5搭建而成的简易PIV系统拍摄记录。
仿生柔性扑翼运动推进平台1包括运动模块、气浮导轨和气浮导轨支架;所述气浮导轨支架用于支撑整个试验平台,其两端平行固定有两个气浮导轨;所述运动模块的两端分别和两个气浮导轨滑动连接,用于实现仿生扑翼的水平平动以及转动;在所述气浮导轨支架正下方设置有静止水槽2;
所述运动模块包括横向电机、旋转电机、旋转电机支架、限位开关、六轴力/力矩传感器、第一联轴器、第二联轴器、运动轴和运动轴支撑架;所述运动轴支撑架垂直于所述气浮导轨,其底面的两端分别和两个气浮导轨滑动连接,两端能够同时沿导轨长度方向水平运动;两个所述运动模块并列设置,上表面通过盖板固定为整体,用于同时模拟胸鳍和尾鳍协同运动。所述运动轴为丝杠,其两端分别通过轴承与所述运动轴支撑架两端连接,所述旋转电机支架通过丝杠螺母垂直安装于所述丝杠的下方,所述横向电机同轴安装于所述运动轴的一端,用于控制所述丝杠的旋转,进一步控制所述旋转电机支架沿丝杠的水平运动;所述旋转电机固定于所述旋转电机支架上,其输出轴依次同轴安装有第一联轴器、六轴力/力矩传感器和第二联轴器;通过所述第二联轴器与被测仿生扑翼连接,所述旋转电机用于控制被测仿生扑翼的旋转运动。
图2为仿生柔性扑翼模具图,通过将硅胶浇灌入模具空腔中最终形成图3所示的naca翼型。所述硫化模具包括上模具和下模具,所述上模具和下模具之间为可拆卸固定连接;所述上模具、下模具合体后的内型和所述扑翼机构的外型一致。本发明中涉及的仿生柔性扑翼由硅胶制成,不同于金属或其他刚性材料制作而成的翼型,硅胶制作而成的柔性扑翼具有被动变形的特性,且柔性可控。
图3为本发明中采用的一种仿生柔性扑翼模型,通过联轴器4和扑翼连接轴7配合,将仿生柔性扑翼固定在推进装置上,实现对仿生柔性扑翼的运动控制。
测试方法包括以下步骤:
步骤一:实验标定,在进行仿生扑翼各方向力/力矩的测定时,需要将扑翼的前进正方向同传感器的X方向进行标定。
步骤二:将仿生扑翼及传感器通过联轴器安装在模组下方,安装完毕后对传感器进行归零处理。
步骤三:启动运动平台,确保平台在推进方向上的稳定运动;
步骤四:通过控制软件,首先设定仿生扑翼的平动位移幅值,平动频率,转动角度幅值,转动频率等运动参数。根据鱼类实际运动情况定出转动的幅值为20°,转动频率为1Hz,1.5Hz,2Hz;根据鱼类实际运动以及模型长度(100mm)定出平动的幅值范围为5mm至25mm,由雷诺数计算公式:Re=fc
步骤五:设定扑翼水平平动初始相位比旋转运动初始相位滞后90°来确保两种运动的合成运动方向沿轴线方向。若要实现对鱼类的胸鳍和尾鳍协同运动的模拟,两组仿生扑翼自身的运动参数与步骤四中所有参数相同,但两组仿生扑翼之间所有运动需存在140°相位差。然后测量不同运动参数下的仿生柔性扑翼各方向的力及力矩,并通过传感器记录软件将力学数据存储和导出。
步骤六:利用高速相机对不同运动参数下的仿生柔性扑翼的运动轨迹进行拍摄,并将视频文件存储和导出。
步骤七:利用piv系统对不同运动参数下的仿生柔性扑翼的流场情况进行拍摄,并将视频文件存储和导出。
步骤八:测试并记录下仿生柔性扑翼在不同运动参数下运动时整个实验平台的移动速度;
步骤九:完成一组仿生扑翼在不同运动参数下所有实验后,关闭所有实验设备。若还需进行其他翼型的仿生柔性扑翼实验,可更换新的翼型准备实验。
步骤十:数据处理部分主要分为水动力性能参数及流场特性处理。水动力性能参数主要分析能量利用率,流场特性主要分析涡的形态变化以及仿生扑翼尾部点的轨迹追踪。
在测试能量利用率方面,本方法主要通过传感器测试出仿生扑翼受到的力,整个模组部分前进速度可测量,故两者相乘可得到有用功,电机所有参数均已知,可以得到总功,再用有用功除总功可以得出能量利用率。
在流场特性分析方面,将PIV系统拍摄得到的视频文件导入后处理软件可以进行流场特性如涡的形态变化,流场内不同点的速度差异度等分析,还可以通过后处理软件对仿生扑翼的尾部点进行轨迹追踪。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
一种仿生柔性扑翼机构及水动力性能测试方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0