






专利摘要
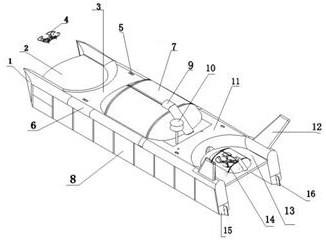
本实用新型公开了一种水空协作打捞装置,包括前视探测设备、双体船主体、四旋翼无人机、无人机平台和浮箱,所述双体船主体的顶部设置有航灯、座舱盖、太阳能板和GPS定位系统,且底部包括水下航行器收纳仓,所述座舱盖顶部包含锁紧机构,所述双体船主体安装有无人机前停机坪与无人机后停机坪,所述无人机平台固定安装于无人机后停机坪上,所述喷水推进装置与方向舵位于浮箱尾部,且方向舵与喷水推进装置铰连接。该水空协作打捞装置,相比传统打捞救援船,本水空协作打捞装置综合了智能船舶和无人飞行器的优势,具备快速搜索锁定目标物的能力,而且双体船内部携带的机械臂和水下航行器可适应不同的工作环境,有利于系统灵活高效完成打捞或救援作业。
权利要求
1.一种水空协作打捞装置,包括前视探测设备(1)、双体船主体(3)、四旋翼无人机(4)、无人机平台(14)和浮箱(8),其特征在于:所述双体船主体(3)的顶部设置有航灯(5)、座舱盖(7)、太阳能板(11)和GPS定位系统(10),且底部包括水下航行器收纳仓(17),所述座舱盖(7)顶部包含锁紧机构(9),所述双体船主体(3)安装有无人机前停机坪(2)与无人机后停机坪(13),所述无人机平台(14)固定安装于无人机后停机坪(13)上,所述四旋翼无人机(4)存放于无人机平台(14)内,所述无人机前停机坪(2)与无人机后停机坪(13)的甲板均铺设有太阳能板(11),所述浮箱(8)包括前视探测设备(1)、机械臂收纳仓(6)、六自由度机械臂(18)、垂直尾翼(12)、喷水推进装置(15)、方向舵(16),且所述浮箱(8)固定于双体船主体(3)两侧,所述喷水推进装置(15)与方向舵(16)位于浮箱(8)尾部,且方向舵(16)与喷水推进装置(15)铰连接。
2.根据权利要求1所述的一种水空协作打捞装置,其特征在于:所述前视探测设备(1)安装于所述浮箱(8)前端,且前视探测设备(1)由毫米波雷达、摄像头、声呐组成。
3.根据权利要求1所述的一种水空协作打捞装置,其特征在于:所述双体船主体(3)底部安装有水下航行器收纳仓(17)。
4.根据权利要求1所述的一种水空协作打捞装置,其特征在于:所述机械臂收纳仓(6)安装于所述浮箱(8)上,且机械臂收纳仓(6)内安装有六自由度机械臂(18)。
5.根据权利要求1所述的一种水空协作打捞装置,其特征在于:所述座舱盖(7)内包含乘员座舱和控制设备,控制设备具有人工驾驶和自主航行两种功能,所述无人机平台(14)由透明玻璃制成。
6.根据权利要求1所述的一种水空协作打捞装置,其特征在于:所述浮箱(8)包括前视探测设备(1)、机械臂收纳仓(6)、垂直尾翼(12)、喷水推进装置(15)、方向舵(16)。
7.根据权利要求1所述的一种水空协作打捞装置,其特征在于:所述喷水推进装置(15)为双体船主体(3)的主动力装置,且喷水推进装置(15)通过差速转向和方向舵(16)产生偏航力矩。
说明书
技术领域
本实用新型涉及打捞装置技术领域,具体为一种水空协作打捞装置。
背景技术
随着自动化技术的发展和智能无人装备的不断完善,无人船和无人机等智能机器人越来越多的出现在人们的公众视野中,智能船舶和无人航空器的协同运用已然成为当下热门课题。目前广泛应用于打捞救援领域的传统打捞船舶多存在航速慢、信息化、智能化程度低的缺陷,这极大限制了该类打捞装置优势的发挥。
在涉及应急救援的打捞作业中,往往需要打捞救援船具备良好的快速反应能力,传统船舶则因信息和航速的短板而错过最佳救援时机
所以我们提出了一种水空协作打捞装置,以便于解决上述中提出的问题。
实用新型内容
本实用新型的目的在于提供一种水空协作打捞装置,以解决上述背景技术提出的目前市场上打捞装置存在航速慢、信息化、智能化程度低的缺陷的问题。
为实现上述目的,本实用新型提供如下技术方案:一种水空协作打捞装置,包括前视探测设备、双体船主体、四旋翼无人机、无人机平台和浮箱,所述双体船主体的顶部设置有航灯、座舱盖、太阳能板和GPS定位系统,且底部包括水下航行器收纳仓,所述座舱盖顶部包含锁紧机构,所述双体船主体安装有无人机前停机坪与无人机后停机坪,所述四旋翼无人机平台固定安装于无人机后停机坪上,所述四旋翼无人机存放于无人机平台内,所述无人机前停机坪与无人机后停机坪的甲板均铺设有太阳能板,所述浮箱包括前视探测设备、机械臂收纳仓、六自由度机械臂、垂直尾翼、喷水推进装置、方向舵,且所述浮箱固定于双体船主体两侧,所述喷水推进装置与方向舵位于浮箱尾部,且方向舵与喷水推进装置铰连接。
优选的,所述前视探测设备安装于所述浮箱前端,且前视探测设备由毫米波雷达、摄像头、声呐组成。
优选的,所述双体船主体底部安装有水下航行器收纳仓。
优选的,所述机械臂收纳仓安装于所述浮箱上,且机械臂收纳仓内安装有六自由度机械臂。
优选的,所述座舱盖内包含乘员座舱和控制设备,控制设备具有人工驾驶和自主航行两种功能,所述无人机平台由透明玻璃制成。
优选的,所述浮箱包括前视探测设备、机械臂收纳仓、垂直尾翼、喷水推进装置、方向舵。
优选的,所述喷水推进装置为双体船主体的主动力装置,且喷水推进装置通过差速转向和方向舵产生偏航力矩。
与现有技术相比,本实用新型的有益效果是:该水空协作打捞装置通过四旋翼无人机和高速智能双体打捞船的组合使用,使得打捞装置具有良好的打捞物搜寻能力。
1、独特的水滴座舱盖起到改善乘员视野的作用,所述双体船配备有水下航行器收纳仓和六自由度机械臂,可为高效打捞作业提供可靠支持,且双体船主体顶端、前后无人机停机坪安装固定的太阳能板,能够为航行提供动力输出,提高使用效果。
2、同时在探测系统装置以及GPS定位系统装置安装使用作用下,使得打捞装置可以在海面上进行良好的自控打捞搜寻作业,为其行驶路径提供更加可靠的数据显示,同时无人机平台对无人机的存放,便于提高四旋翼无人机的可持续作业量与寿命,在双体船左右两侧安装的浮箱,有利于提高双体船的耐波性和抗浪性能,且浮箱上端的垂直尾翼有利于保证双体船在机动转弯的灵活性,此外,本打捞装置采用喷水推进装置,可为双体船高速航行提供动力支持。
附图说明
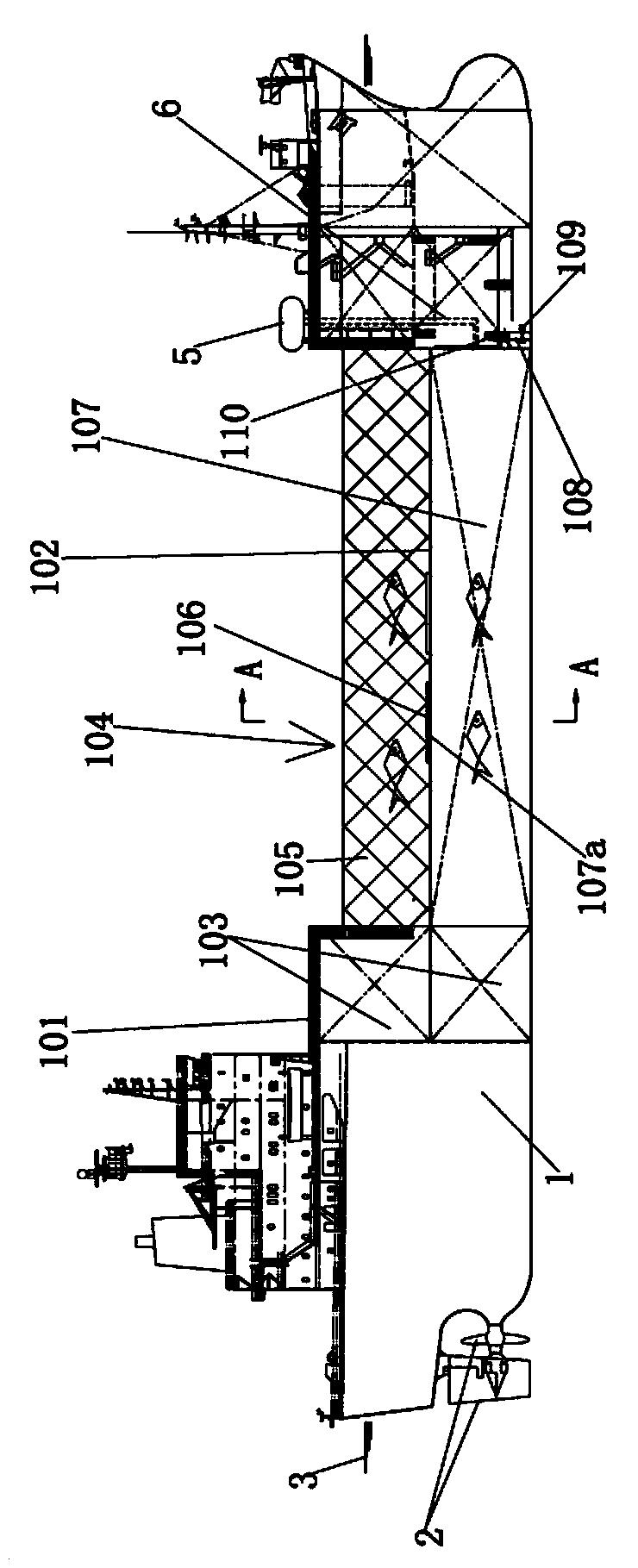
图1为本实用新型侧下俯视结构示意图;
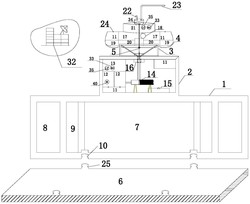
图2为本实用新型侧视结构示意图;
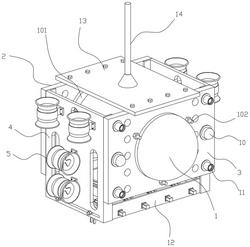
图3为本实用新型俯视结构示意图;
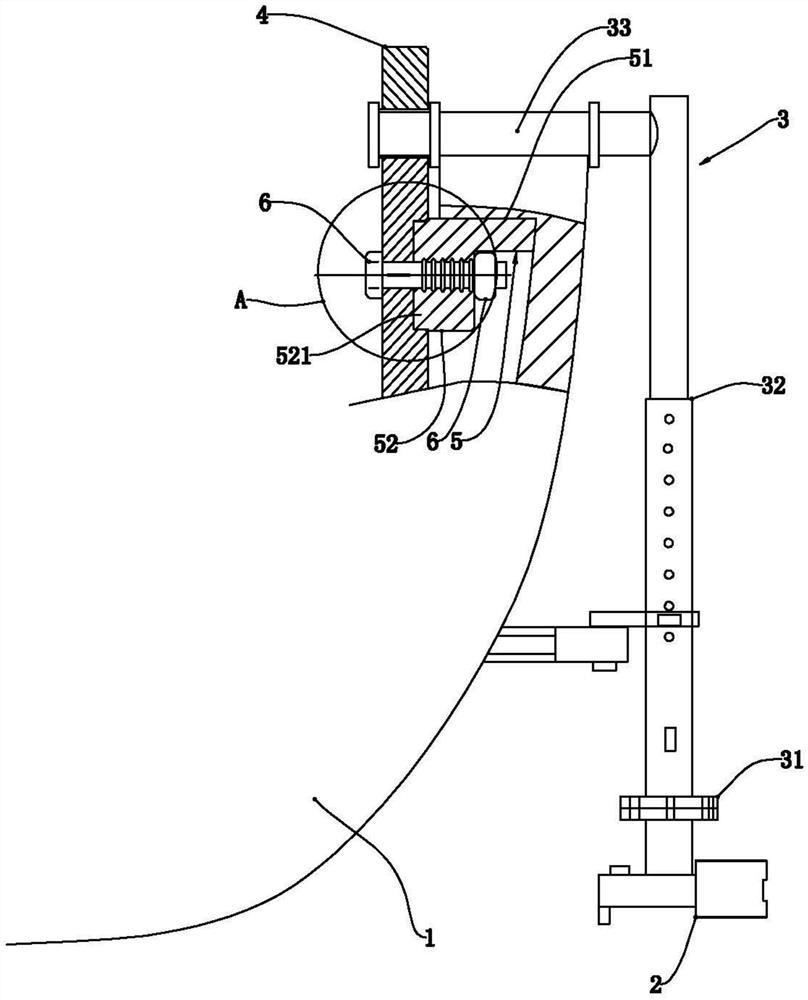
图4为本实用新型前视结构示意图;
图5为本实用新型后视结构示意图;
图6为本实用新型侧上仰视结构示意图。
图中:1、前视探测设备;2、无人机前停机坪;3、双体船主体;4、四旋翼无人机;5、航灯;6、机械臂收纳仓;7、座舱盖;8、浮箱;9、锁紧机构;10、GPS定位系统;11、太阳能板;12、垂直尾翼;13、无人机后停机坪;14、无人机平台;15、喷水推进装置;16、方向舵;17、水下航行器收纳仓; 18、六自由度机械臂。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
实施例一
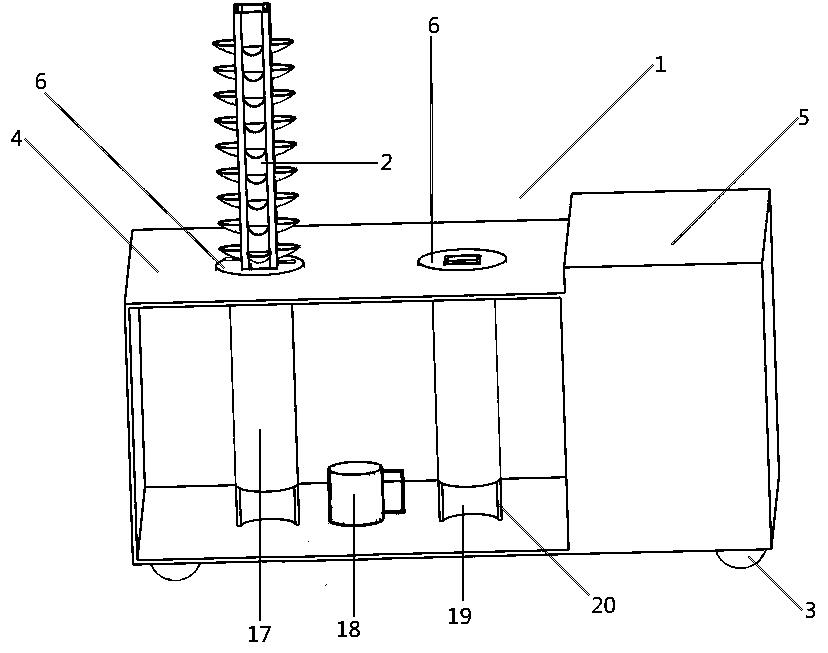
请参阅图1-6,本实用新型提供一种技术方案:一种水空协作打捞装置,包括前视探测设备1、无人机前停机坪2、双体船主体3、四旋翼无人机4、航灯5、机械臂收纳仓6、座舱盖7、浮箱8、锁紧机构9、GPS定位系统10、太阳能板11、垂直尾翼12、无人机后停机坪13、无人机平台14、喷水推进装置15、方向舵16、水下航行器收纳仓17和六自由度机械臂18,且底部包括水下航行器收纳仓17,座舱盖7顶部包含锁紧机构9,双体船主体3安装有无人机前停机坪2与无人机后停机坪13,无人机平台14固定安装于无人机后停机坪13上,四旋翼无人机4存放于无人机平台14内,浮箱8包括前视探测设备1、机械臂收纳仓6、六自由度机械臂18、垂直尾翼12、喷水推进装置15、方向舵16,且浮箱8固定于双体船主体3两侧,喷水推进装置15与方向舵16位于浮箱8尾部,且方向舵16与喷水推进装置15铰连接。
前视探测设备1安装于浮箱8前端,且前视探测设备1由毫米波雷达、摄像头、声呐组成,主要用于水面水下感知和避障。
无人机前停机坪2与无人机后停机坪13的甲板均铺设有太阳能板11,双体船主体3的顶部设置有航灯5、座舱盖7、太阳能板11和GPS定位系统10,太阳能板11为打捞装置运行提供额外电源,且双体船主体3底部安装有水下航行器收纳仓17,可用于投放自主式水下航行器,航灯5用于备用照明。
机械臂收纳仓6安装于浮箱8上,且机械臂收纳仓6内安装有六自由度机械臂18,且六自由度机械臂18主要用于打捞目标物。
座舱盖7顶部包含锁紧机构9,用于开闭座舱盖7,且座舱盖7内包含乘员座舱和控制设备,控制设备具有人工驾驶和自主航行两种功能,且自主航行路线以GPS定位系统10作为导航支撑,双体船主体3安装有无人机前停机坪2与无人机后停机坪13,且无人机前停机坪2为四旋翼无人机4起降备用停机坪,无人机平台14固定安装于无人机后停机坪13上,无人机平台14由透明玻璃制成,四旋翼无人机4存放于无人机平台14内,当四旋翼无人机4 从无人机平台14起降时,无人机平台14电启动开启。
浮箱8包括前视探测设备1、机械臂收纳仓6、垂直尾翼12、喷水推进装置15、方向舵16,且浮箱8固定于双体船主体3两侧,垂直尾翼12内置通信设备,且主要用于保持打捞装置转弯时的稳定性。
喷水推进装置15与方向舵16位于浮箱8尾部,且方向舵16与喷水推进装置15铰连接,确保双体船主体3的正常航行。
喷水推进装置15为双体船主体3的主动力装置,且该喷水推进装置15 通过差速转向和方向舵16产生偏航力矩,保证双体船主体3的正常航行。
实施例二
在本实用新型提供又一实施例中,本实施例中的水空协作打捞装置和实施例一中的水空协作打捞装置的结构类似,对相同之处就不再赘述了,仅介绍不同之处。
双体船主体3的顶部设置有航灯5、座舱盖7、太阳能板11和GPS定位系统10,太阳能板11为打捞装置运行提供额外电源,双体船主体3底部安装有水下航行器收纳仓17,可用于投放有缆式水下航行器进行水下搜寻打捞物,航灯5用于备用照明。
座舱盖7顶部包含锁紧机构9,用于开闭座舱盖7,且座舱盖7内包含乘员座舱和控制设备,控制设备具有人工驾驶和自主航行两种功能,且自主航行路线以GPS定位系统10作为导航支撑,双体船主体3安装有无人机前停机坪2与无人机后停机坪13,且无人机前停机坪2可起降无人直升机、多旋翼无人机或垂直起降固定翼无人机,无人机平台14固定安装于无人机后停机坪 13上,无人机平台14由塑料制成,四旋翼无人机4存放于无人机平台14内,当四旋翼无人机4从无人机平台14起降时,无人机平台14电启动开启。
工作原理:在使用水空协作打捞装置时,首先根据图1-6所示,该打捞装置,主要用于打捞或救援领域,此种打捞船在海面上行驶时,利用喷水推进装置15提供动力进行行驶,并采用差速转向和方向舵16联动实现转弯动作,与传统船舶相比行驶速度快,更为灵活与稳定,同时在海面上行驶时,双体船在抗风浪性能上有明显优势。
实施打捞救援作业时,喷水推进装置15提供动力使双体船高速航行,同时无人机平台14电启动打开舱门,无人机从无人机前停机坪2或无人机平台14起飞,协助打捞双体船主体3快速搜寻目标物,在自控作业模式下,通过探测系统内的毫米波雷达、声呐以及摄像头实现精准感知和避障,凭借GPS 定位系统10实现自主航行,在搜寻过程中,座舱内乘员可自由切换人工驾驶和自主航行模式,亦可操纵无人机协同搜寻,水滴形座舱盖7为乘员提供了开阔的视角,当搜寻到目标物时,六自由度机械臂18伸出开始打捞作业,在必要的时候,打捞装置还可以投放水下航行器协助打捞。
尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
一种水空协作打捞装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0