










专利摘要
一种基于航空拖缆拖靶系统的无人机空基精准回收装置与方法。该装置包括可收放式安装支架、航空拖缆拖靶系统和多个回收对接装置。该回收对接装置包括连接在所述拖缆上的金属网结构和安装在无人机上的对接钩结构。本发明借助航空拖缆拖靶技术,回收对接装置相距一定间隔安装在拖缆上,回收前先将拖缆释放,然后导引无人机与拖缆上安装的回收对接装置对接,最后随拖缆的回收实现无人机的空基回收。可以实现一定数量的无人机同时精准回收,缩短了无人机集群在回收过程中消耗的时间,同时降低了对无人机以及母机的损伤风险。
权利要求
1.一种基于航空拖缆拖靶系统的无人机空基精准回收装置,其特征在于,该回收装置包括安装支架、航空绞车(5)、航空拖缆拖靶系统和多个回收对接装置(3);其中,各所述回收对接装置(3)相互之间有一定的间隔,在垂直方向上具有一定的高度差,在回收过程中能够避免无人机相互之间发生碰撞而造成损伤;所述航空拖缆拖靶系统由拖缆(2)和稳定拖靶(4)构成;所述安装支架为可收放式,所述安装支架分多段,可沿竖直方向伸缩,在母机(1)运输无人机过程中可收入母机(1)机体内部,不影响母机(1)的气动外形;所述回收对接装置(3)是一种机械对接装置,该装置包括两部分,一部分为金属网结构(7),该金属网结构(7)连接在所述拖缆(2)上;另一部分为对接钩结构(8),安装在被回收无人机上,既保证了单个回收对接装置(3)的体积、外形不致于太大,又能完成可靠精准回收;使用时,无人机上的对接钩结构(8)伸出机头外,通过导引无人机撞击连接在所述拖缆上的金属网结构,使对接钩结构勾挂在所述金属网结构(7)上,完成无人机的回收;所述回收对接装置(3)还包括导引系统,用于导引各无人机在收到回收指令时靠近回收对接装置,并在所述导引系统的导引下与所述回收对接装置(3)完成对接;所述航空绞车(5)安装固定在所述安装支架的下端,通过所述航空绞车(5)实现所述航空拖缆拖靶系统的收回;所述稳定拖靶(4)连接于所述拖缆(2)的下端,起到稳定所述拖缆(2)的作用;所述拖缆(2)的上端连接所述航空绞车(5),在收到回收指令后,随着各无人机被所述导引系统导引与所述回收对接装置(3)完成对接,所述航空绞车(5)收回所述航空拖缆拖靶系统和已回收对接好的所有无人机到母机(1)机舱内,母机(1)舱门关闭;
所述导引系统为载波相位差分和视觉相结合的导引系统;
所述各回收对接装置(3)安装在所述拖缆(2)上,其安装距离与数量取决于所需同时回收的无人机的数量要求,以及被回收无人机的尺寸;
回收时所述航空绞车(5)将所述航空拖缆拖靶系统收回,随着所述拖缆(2)的逐渐回收,人工将待回收的各无人机从所述回收对接装置(3)上拆下卸载,放置在母机(1)机舱内提前预留的存储位置;
在运输过程中,所述安装支架收入母机(1)机身内;所述稳定拖靶(4)的重心、在安装支架的悬挂点和机翼焦点位于相同的纵向位置上,所述稳定拖靶(4)纵向静稳定度大,可保持自身飞行稳定性,进而起到保持所述拖缆(2)缆形的作用。
2.一种根据权利要求1所述的无人机空基精准回收装置,其特征在于,所述拖缆(2)全长900-1200m。
3.一种根据权利要求1所述的无人机空基精准回收装置,其特征在于,所述拖缆(2)的直径范围为2-5mm。
4.一种根据权利要求1所述的无人机空基精准回收装置,其特征在于,所述拖缆(2)上每隔100米安装一个所述回收对接装置(3)。
5.一种利用权利要求1-4中任一项所述的基于航空拖缆拖靶系统的无人机空基精准回收装置进行无人机空基精准回收的方法,其特征在于,在母机(1)承载运输多架小型折叠无人机运输到达任务地点执行完任务后,母机(1)首先打开舱门释放拖缆(2),待无人机飞近所述回收对接装置(3)时,所述回收对接装置(3)上的导引系统开始工作,导引无人机逐步靠近所述回收对接装置(3),直到完成各无人机与所述回收对接装置(3)的对接;当所有需要回收的无人机均完成对接后,所述航空绞车(5)将拖缆(2)携带着无人机匀速收回,工作人员在母机内,随拖缆的回收将对接在所述回收对接装置(3)上的无人机拆下收回,放置在母机内提前预留的存储位置,实现无人机的回收;回收完成后,所述安装支架收入机身内,然后母机返航。
说明书
技术领域
本发明公开了一种基于航空拖缆拖靶系统的无人机空基精准回收装置与方法,属于航空飞行器技术的无人机回收领域。
背景技术
自20世纪30年代起,人们就开始向往实现飞机的空基发射与回收,这种发射与回收方式通过航程、载重较大的母机将子飞机运输到任务区域,可以极大的增加子飞机的巡航半径,摆脱了地面机场限制,增大了子飞机起降的灵活性。然而受技术、风险和成本限制,飞机空基发射与回收技术并没有得到很好的发展。
近年来,随着无人机技术发展,以及近期蜂群无人机战术的提出,小型无人机空基发射与回收技术越来越受到航空领域的重视。小型无人机系统已证明其在战场上的价值,常规作战和特种作战部队都使用小型无人机系统,提供点、路线和环境侦察、目标捕获、战损评估以及其它创新应用。小型无人机系统将通过“改变游戏规则”的概念来增强或重新定义空中作战力量,各类新型无人机作战形式层出不穷,蜂群无人机战术就是其中之一。而小型无人机自身固有劣势仍制约着蜂群无人机战术走向战场实用。小型无人机重量小,速度低,航时和航程相比大型无人机小很多,作战半径有限,作战前突能力差,不能执行远距离作战任务,无法最大限度发挥中小型无人机蜂群作战的优势,这成为了制约中小型无人机创新作战概念和作战任务实施的障碍。解决小型无人机固有劣势最直接有效的办法是选择空基发射与回收方式。利用大型运输机作为空中母机,将小型无人机带到任务区域上,然后进行快速空中发射,利用无人机蜂群作战优势,对目标敏感区域进行侦察打击,任务结束后母机可视情对蜂群无人机进行回收。
现有空基精确回收方法与装置如专利CN106516144A、CN205770184U、CN204674845U和CN205971887U等,采用的大多是撞网、翼尖撞线等方式。这些方式虽然能实现较大批量无人机的同时回收,但其缺点比较明显:首先,为使无人机避开母机附近的湍流,需要设计较长的机械机构使网张开的时候距离母机相对较远。其次,大批量回收需要拦阻网有较大的面积,也需要相应的折叠机构来满足闲置状态下母机内的存放,增加了结构复杂度。最后,撞网、撞线类回收方式对无人机机体结构的损伤比较大,会导致无人机的使用寿命降低。
发明内容
针对上述问题,本发明主要解决无人机空基精准回收问题,将拖缆拖靶系统技术应用在无人机的空基回收过程中,提出了一种基于航空拖缆拖靶系统的无人机空基精准回收装置及其方法。
一种基于航空拖缆拖靶系统的无人机空基精准回收装置,该回收装置包括安装支架、航空绞车、航空拖缆拖靶系统和多个回收对接装置;其中,各所述回收对接装置相互之间有一定的间隔,在垂直方向上具有一定的高度差,在回收过程中能够避免无人机相互之间发生碰撞而造成损伤;所述航空拖缆拖靶系统由拖缆和稳定拖靶构成;所述安装支架为可收放式,在母机运输无人机过程中可收入母机机体内部,不影响母机的气动外形;所述回收对接装置是一种机械对接装置,该装置包括两部分,一部分为金属网结构,连接在所述拖缆上;另一部分为对接钩结构,安装在被回收无人机上;所述金属网结构大小与所述安装在被回收无人机上的对接钩结构大小相适配;既保证了体积、外形不致于太大,又能完成可靠精准回收;使用时,无人机上的对接钩结构伸出机头外,通过导引无人机撞击连接在所述拖缆上的金属网结构,使对接钩结构勾挂在所述金属网上,完成无人机的回收;所述回收对接装置还包括导引系统,用于引导各无人机在收到回收指令时靠近回收对接装置,并在所述导引系统的导引下与所述回收对接装置完成对接;所述航空绞车安装固定在所述安装支架的下端,通过所述航空绞车实现所述航空拖缆拖靶系统的收回;所述稳定拖靶连接于所述拖缆的下端,起到稳定所述拖缆的作用;所述拖缆的上端连接所述航空绞车,在收到回收指令后,随着各无人机被导引系统引导与所述回收对接装置完成对接,所述航空绞车收回所述航空拖缆拖靶系统和已回收对接好的所有无人机到母机机舱内,母机舱门关闭。
优选的,所述导引系统为载波相位差分和视觉相结合的导引系统。
优选的,所述各回收对接装置安装在所述拖缆上,其安装距离与数量取决于所需同时回收的无人机的数量要求,以及被回收无人机的尺寸。
优选的,回收时所述航空绞车将所述航空拖缆拖靶系统收回,随着所述拖缆的逐渐回收,人工将待回收的各无人机从所述回收对接装置上拆下卸载,放置在母机机舱内提前预留的存储位置。
优选的,所述拖缆全长900-1200m。
优选的,所述拖缆的直径范围为2-5mm。
优选的,所述金属网结构大小的直径范围为0.25-0.50m。
优选的,所述金属网结构通过一可靠连接装置连接到所述拖缆。
优选的,所述拖缆上每隔100米安装一个所述回收对接装置。
优选的,所述安装支架分多段,可沿竖直方向伸缩;在运输过程中,所述安装支架收入母机机身内;所述拖缆的重心、在安装支架的悬挂点和稳定拖靶的机翼焦点位于相同的纵向位置上;所述稳定拖靶纵向静稳定度大,可保持自身飞行稳定性,进而起到保持拖缆缆形的作用。
一种利用上述基于航空拖缆拖靶系统的无人机空基精准回收装置进行无人机空基精准回收的方法,在母机承载运输多架小型折叠无人机运输到达任务地点执行完任务后,母机首先打开舱门释放拖缆,待无人机飞近所述回收对接装置时,所述回收对接装置上的导引系统开始工作,导引无人机逐步靠近所述回收对接装置,直到完成各无人机与所述回收对接装置的对接;当所有需要回收的无人机均完成对接后,所述航空绞车将拖缆携带着无人机匀速收回,工作人员在母机内,随拖缆的回收将对接在所述回收对接装置上的无人机拆下收回,放置在母机内提前预留的存储位置,实现无人机的回收;回收完成后,所述安装支架收入机身内,然后母机返航。
本发明的优点在于:
(1)能够通过一套设备实现批量的小型无人机同时回收,能够提高空中回收的效率;
(2)操作简单,操作过程中的参与人员较少;
(3)可以针对不同大小的母机平台和所需同时回收的无人机数量设计相应尺寸的回收装置,灵活性强;
(4)待回收无人机相互之间有高差,且有导引系统导引,降低了无人机批量回收过程中无人机相互撞击的风险;
附图说明
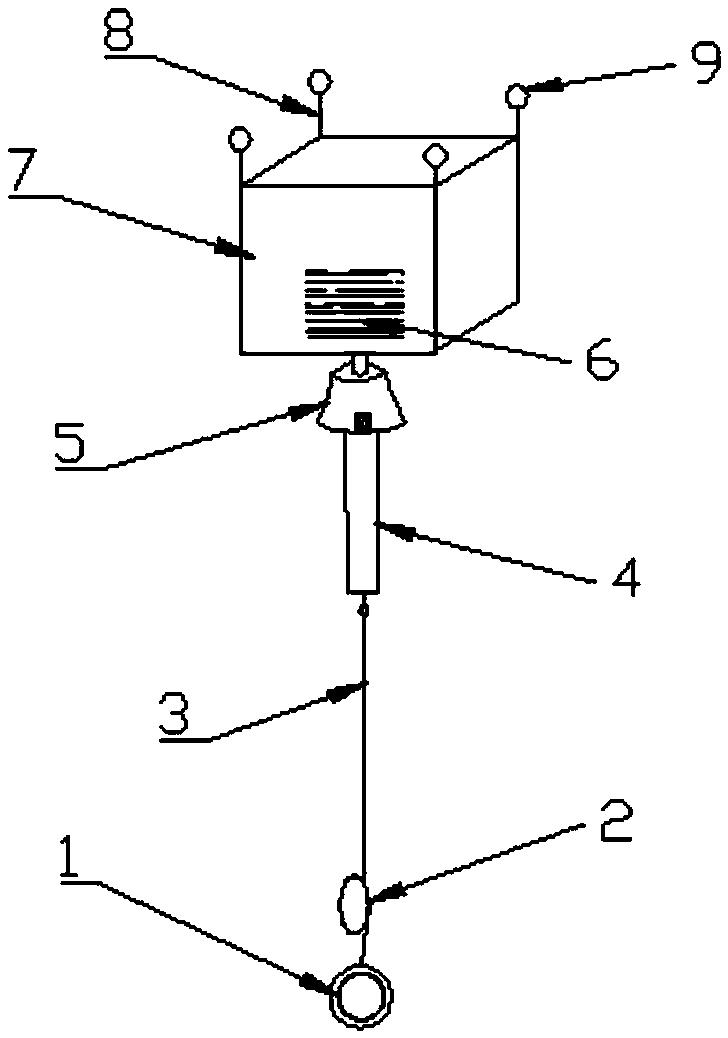
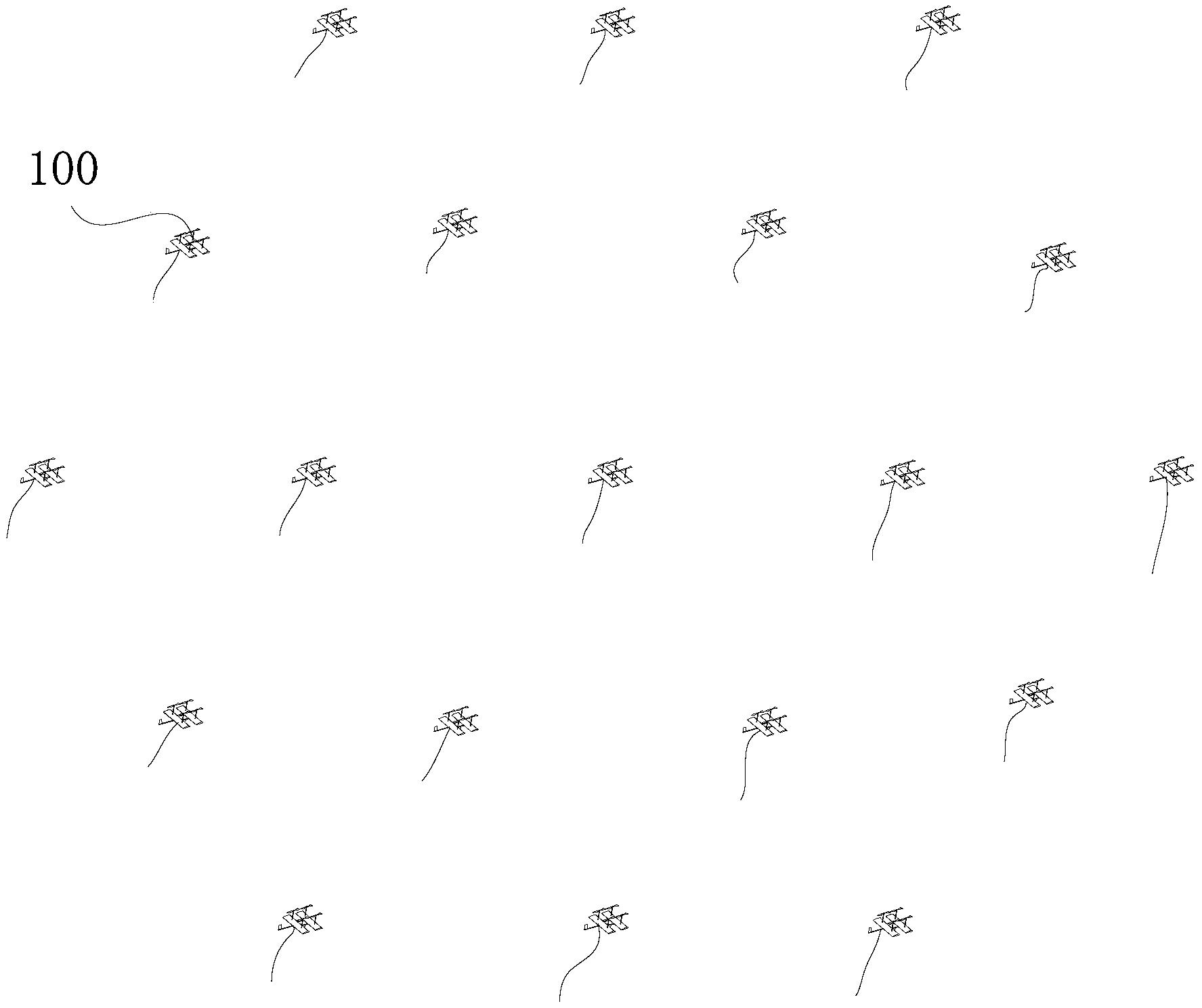
图1为本发明回收对接装置随拖缆安装在母机上(无人机外出执行任务,待回收)的工作状态图。
图2为本发明无人机空基回收装置整体收起时的状态图。
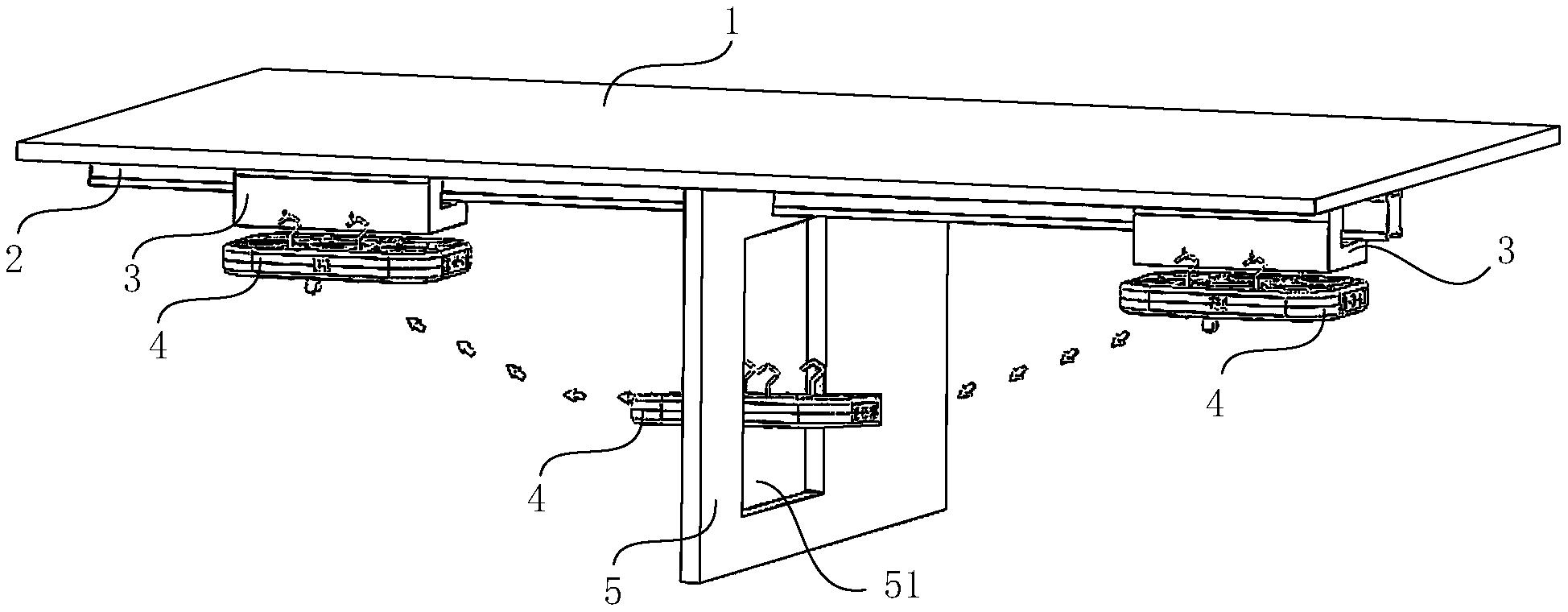
图3为实施例无人机空基回收(回收无人机过程中)全局示意图。
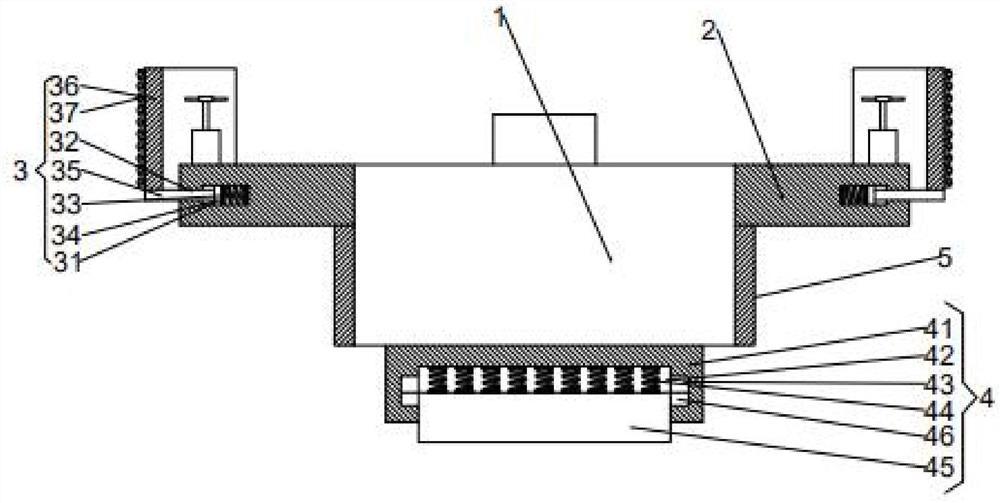
图4为实施例无人机空基回收(无人机已回收对接)局部示意图。
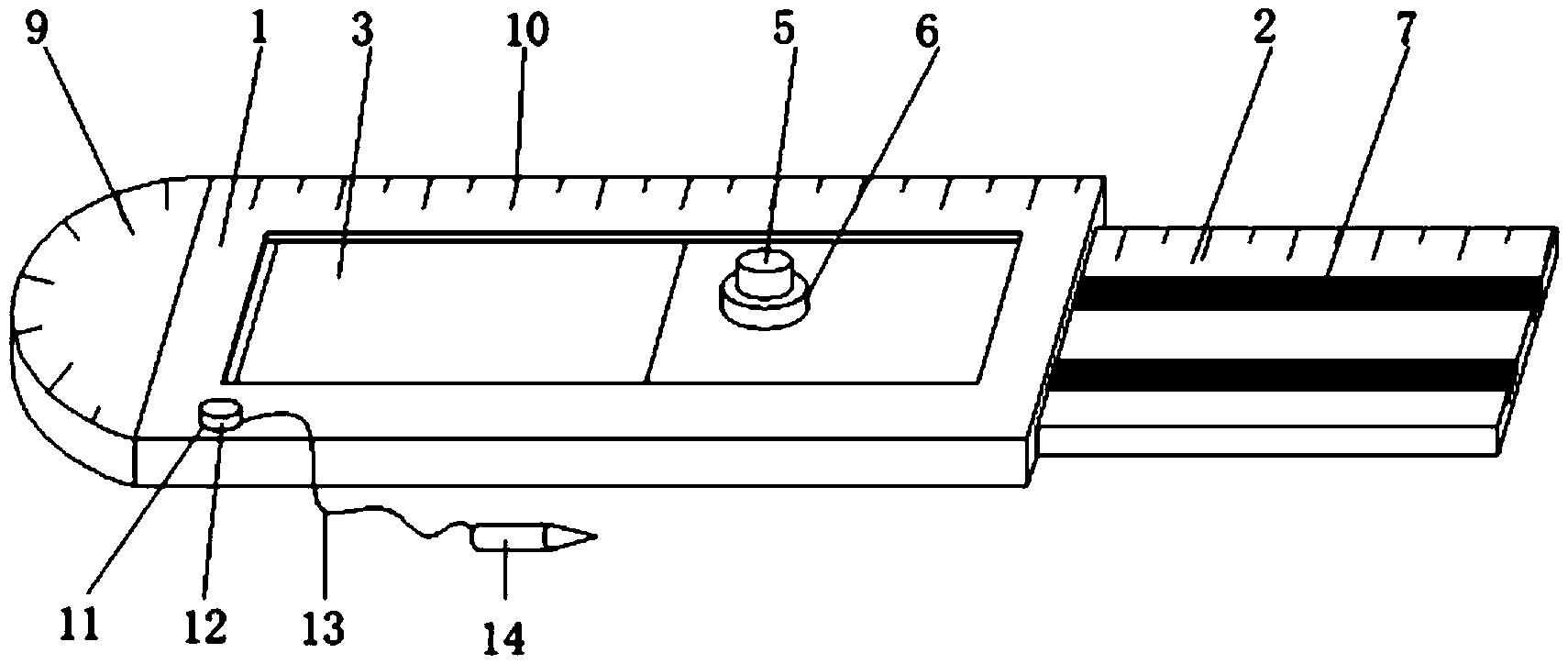
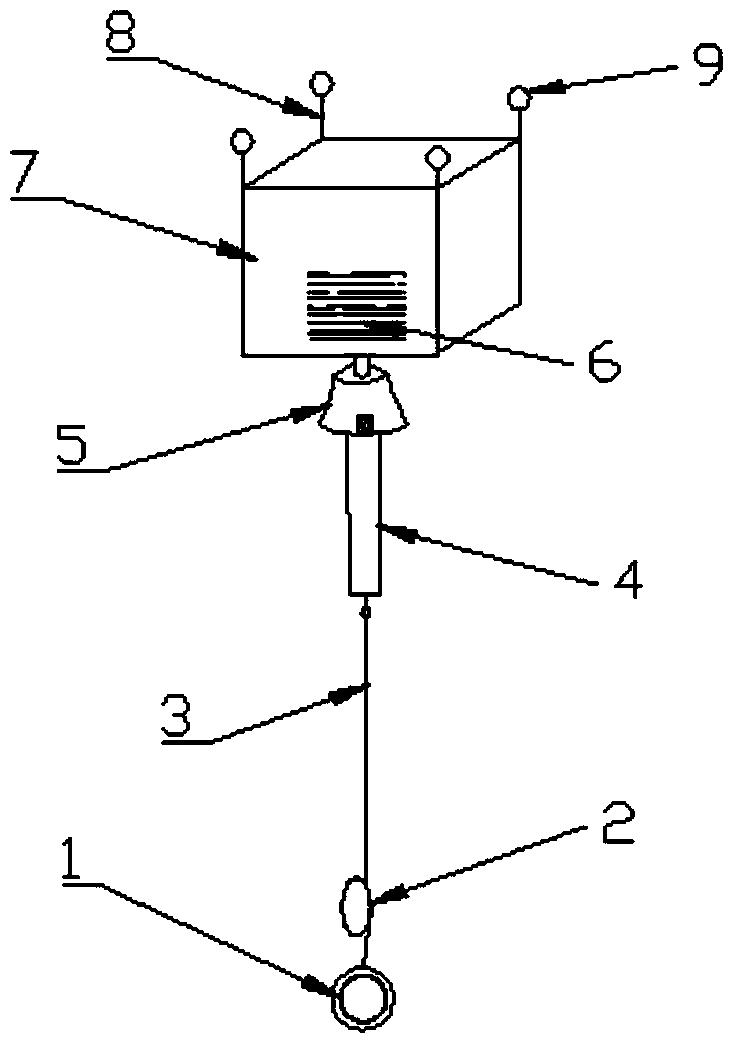
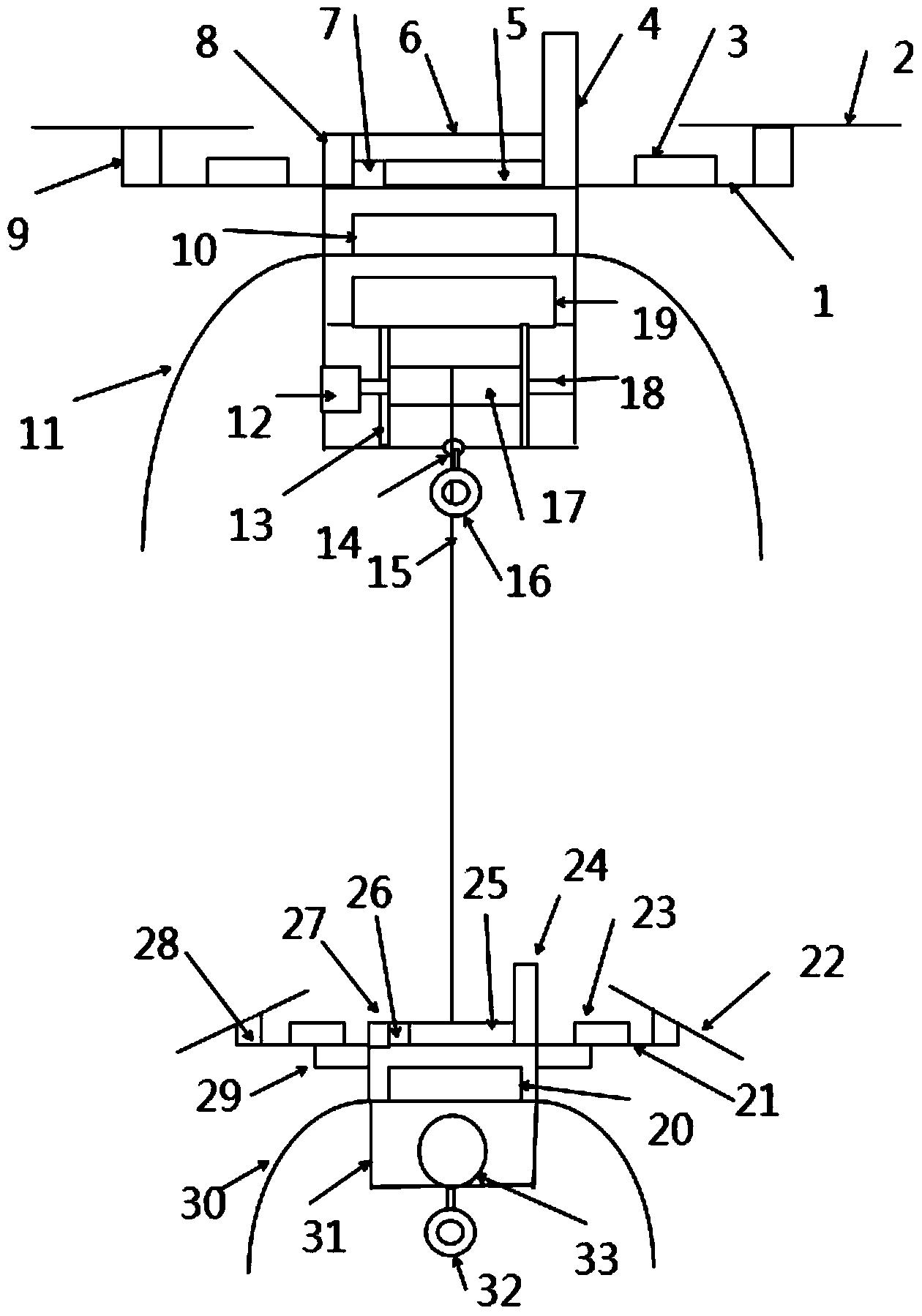
图5为本发明回收对接装置结构示意图。
其中,1为母机,2为拖缆,3为回收对接装置,4为稳定拖靶,5为航空绞车,6为小型无人机,7为回收对接网状接头,8为撞钩结构。安装支架在图中未示出。
具体实施方式
如图1所示,一种基于航空拖缆拖靶系统的无人机空基精准回收装置,其特征在于,该回收装置包括安装支架、航空绞车5、航空拖缆拖靶系统和多个回收对接装置3;其中,所述回收对接装置3包括导引系统,用于引导各无人机在收到回收指令时靠近回收对接装置,并在所述导引系统的导引下与所述回收对接装置3完成对接;各所述回收对接装置3相互之间有一定的间隔,在垂直方向上具有一定的高度差,在回收过程中能够避免无人机相互之间发生碰撞而造成损伤;所述航空拖缆拖靶系统由拖缆2和稳定拖靶4构成;所述安装支架为可收放式,在母机1运输无人机过程中可收入母机1机体内部,不影响母机1的气动外形;所述航空绞车5安装固定在所述安装支架的下端,通过所述航空绞车5实现所述航空拖缆拖靶系统的收回;所述稳定拖靶4连接于所述拖缆2的下端,起到稳定所述拖缆2的作用;所述拖缆2的上端连接所述航空绞车5,在收到回收指令后,随着各无人机被导引系统引导与所述回收对接装置3完成对接,所述航空绞车5收回所述航空拖缆拖靶系统和已回收对接好的所有无人机到母机1机舱内,母机1舱门关闭。
以运输机为母机,8架起飞重量为10kg,航程为150km的小型折叠无人机6运输到600km以外的目标地点执行任务。无人机6任务完成后,回收的过程中母机1首先释放拖缆2,拖缆总长900m,各回收对接装置3安装在拖缆上2,每相邻的两个回收对接装置之间间隔100m。待无人机6飞近回收对接装置3时,回收对接装置3上的导引系统开始工作,导引无人机6逐步靠近回收对接装置3,直到完成小型无人机6与回收对接装置3的对接(如附图3、4所示)。当所有需要回收的无人机6均对接完成后,航空绞车5将拖缆2携带着无人机6匀速收回,两名工作人员在母机内,随拖缆2的回收将对接在回收装置上的小型无人机6拆下收回,放置在母机1机舱内提前预留的存储位置,实现无人机6的回收。回收完成后,支架收入机身内,然后母机1返航。
本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。本发明的上述实施例是对方案的说明而不能用于限制本发明,与本发明有保护范围相当的含义和范围内的任何改变,都应认为是包括在本发明保护的范围内。
一种基于航空拖缆拖靶系统的无人机空基精准回收装置与方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0