









专利摘要
本发明涉及一种光学测量高轨慢旋失稳目标的编队卫星相对消旋系统及方法,光学信息测量和处理模块完成对高轨慢旋失稳目标的光学成像,并从序列图象中连续提取目标亮度、目标在图像的大小和位置信息;编队卫星动力学模块实现编队卫星对目标的联合相对消旋运动,实时测量和计算编队卫星间的相对距离;目标运动信息反演模块完成目标到编队卫星的相对距离实时解算、目标相对编队卫星的相对速度计算、目标在编队卫星光学载荷下的自旋信息统计反演及自适应加权计算,得到目标的自旋周期;编队卫星相对消旋制模块实时计算多脉冲控制数量,编队卫星的实际速度矢量和期望速度矢量,生成编队卫星相对消旋期望脉冲控制指令。
权利要求
1.一种光学测量高轨慢旋失稳目标的编队卫星相对消旋系统,其特征在于:包括光学信息测量和处理模块、目标运动信息反演模块、编队卫星相对消旋模块、编队卫星及目标动力学模块;其中:
光学信息测量和处理模块,完成对高轨慢旋失稳目标的光学成像,并从序列图象中连续提取目标亮度、目标在图像的大小和位置信息,得到目标的亮度变化曲线、目标像平面的位置坐标,并提供给目标运动信息反演模块;
目标运动信息反演模块,根据光学信息测量和处理模块得到的亮度变化曲线、目标在像平面的位置坐标,编队卫星及目标动力学模块输入的编队卫星间的相对距离,完成目标到编队卫星的相对距离实时解算、目标相对编队卫星的相对速度计算、目标在编队卫星光学载荷下的自旋信息统计反演及自适应加权计算,得到目标的自旋周期,并输出给编队卫星相对消旋模块;
编队卫星相对消旋模块,接收目标运动信息反演模块得到的目标运动信息反演模块得到自旋周期,目标和编队卫星的相对距离、目标和编队卫星的相对速度,以及编队卫星相对消旋期望共振比,实时计算多脉冲控制数量,编队卫星的实际速度矢量和期望速度矢量,生成编队卫星相对消旋期望脉冲控制指令,输入编队卫星及目标相对动力学模块;
编队卫星及目标动力学模块,仿真执行相对消旋脉冲控制指令,并通过状态转移计算,实现编队卫星对目标的联合相对消旋运动,通过星间通信,实时测量和计算编队卫星间的相对距离,并输出给目标运动信息反演模块;
在整个共振周期内完成整个相对消旋任务。
2.根据权利要求1所述的光学测量高轨慢旋失稳目标的编队卫星相对消旋系统,其特征在于:所述目标运动信息反演模块具体实现如下:
(1)接收目标在图像的大小和位置信息,提取目标质心并计算目标质心在图像的位置信息,基于目标在编队各卫星的单帧成像图像的位置信息,结合编队卫星间的相对测距信息,完成目标到编队卫星的相对距离实时解算;
(2)接收目标在图像的大小和位置信息,提取目标质心并计算目标质心在图像的位置信息,基于目标在编队各卫星的多帧成像图像的方位变化信息,结合目标到编队卫星间的相对距离信息,完成目标相对编队卫星的相对速度计算;
(3)接收目标亮度信息,在连续观测一段时间后,利用编队各卫星在目标成像过程中提取的亮度变化曲线,利用自相关分析,各卫星反演目标自转周期,利用互相关分析,计算编队双卫星间的相关时延,并利用目标、编队双卫星的几何关系计算编队双卫星、目标之间的角度,解算出基于双卫星计算的目标自旋周期,结合各卫星与目标的相对距离,相关时延,通过目标在编队卫星光学载荷下的自旋信息统计反演及自适应加权计算,得到目标的自旋周期。
3.根据权利要求1所述的光学测量高轨慢旋失稳目标的编队卫星相对消旋系统,其特征在于:所述编队卫星相对消旋模块具体实现如下:
(1)接收目标到编队各卫星的相对距离信息,基于相对距离信息、编队卫星相对消旋期望共振比自适应确定多脉冲数量,接收目标运动信息反演模块输出的目标自旋周期,计算编队卫星相对于目标的期望速度信息;
(2)基于多脉冲数目及任务周期,确定多脉冲的时间间隔,并计算时间间隔内目标与编队卫星在本体坐标系下的相对速度矢量,并结合目标的期望速度矢量计算编队卫星相对消旋期望脉冲控制指令。
4.一种光学测量高轨慢旋失稳目标的编队卫星相对消旋方法,其特征在于:包括以下步骤:
(1)编队卫星首先对高轨慢旋失稳目标进行目标光学探测,获取目标的连续光学成像信息,并通过光学信息测量和处理提取目标亮度、目标在图像的大小和位置信息,得到目标的亮度变化曲线、目标像平面的位置坐标;目标亮度计算采用对目标分布的像平面内像元灰度累计积分,计算公式为:
light为目标的亮度值,Grey
其中Hei为高低角,Azi为方位角,(x,y)为目标在像平面的位置坐标,θ
(2)根据提取得到的亮度变化曲线、目标在像平面的位置坐标,编队卫星及目标动力学模块输入的编队卫星间的相对距离,完成目标到编队卫星的相对距离实时解算、目标相对编队卫星的相对速度计算、目标在编队卫星光学载荷下的自旋信息统计反演及自适应加权计算,得到目标的自旋周期;动态加权反演目标的自旋周期,基于编队卫星自相关分析反演目标的自旋周期和互相关分析获取的相关时延加权计算,自相关分析获取目标自旋周期取自相关函数的最大时延,即max(R(t
最终反演出目标自旋周期为:
其中D
(3)根据目标运动信息反演得到的自旋周期,目标和编队卫星的相对距离、目标和编队卫星的相对速度,以及编队卫星相对消旋期望共振比,动态确定相对消旋控制脉冲数量,之后应用等时间、等角度多脉冲状态转移方法,依次确定一个自旋周期内在编队卫星本体坐标系下的各速度脉冲增量值,通过脉冲指令的执行,完成整个目标相对消旋控制过程;
脉冲时间间隔确定公式为:
其中n为期望共振比,N为脉冲数量,T为目标自旋周期;
速度增量计算公式为:
其中
(4)基于计算的得到速度脉冲的增量值,依次执行相对消旋脉冲控制指令,并通过状态转移计算,实现编队卫星对目标的联合相对消旋运动,状态转移计算公式为:
其中Φ
说明书
技术领域
本发明涉及天基目标探测、识别及跟踪技术,面向空间在轨服务任务领域,确切的说是一种面向慢旋失稳目标的编队双卫星相对消旋系统。
背景技术
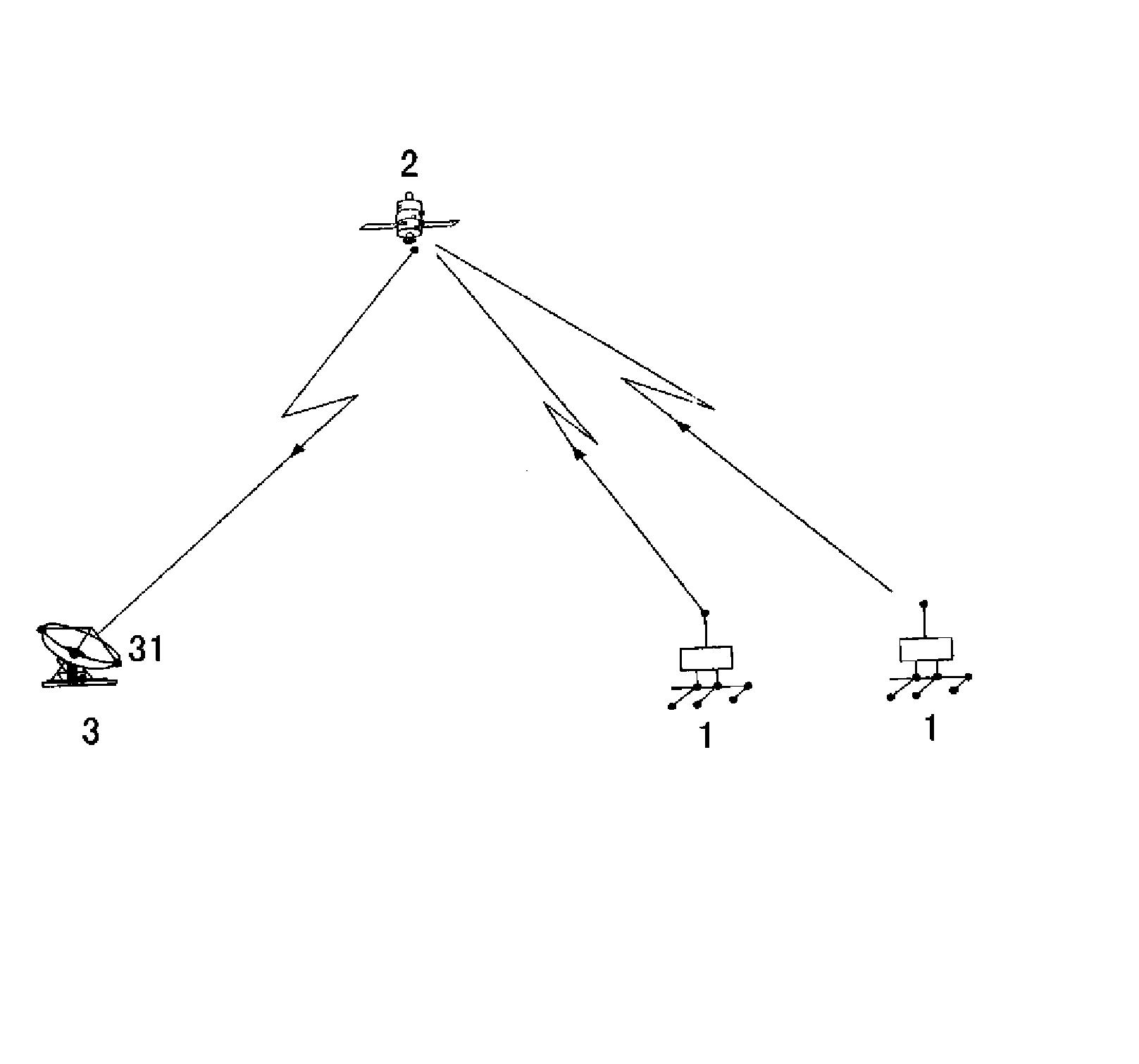
高轨空间慢旋失稳目标是一类失控的故障卫星平台对象,表现在运动形式上就是在自身轨道上绕特定转轴以一定角速度进行旋转。相对消旋是一种相对运动描述,主要是为了实现观测平台对目标模型的特定面连续观测。该运动主要包括三个特点:一是观测平台在相对于目标的轨道上绕目标旋转,且轨道角速度与目标自转角速度一致,二是观测平台、目标的相对轨道法线方向与目标自转轴方向重合;三是观测平台的观测转轴始终指向目标。高轨空间慢旋失稳目标往往表现为非合作特点,且高轨空间可利用信息少,现阶段国内外对高轨故障卫星持续观测和跟踪还没有很好的解决办法。本方法利用直线编队双卫星,基于慢旋失稳目标的周期性运动特点,通过直线编队双卫星的持续光学测量,获取和反演卫星、目标的相对距离、相对速度、自旋速度等信息,并基于以上信息,生成控制指令,实现目标的受控绕飞和相对消旋。
空间领域常用的消旋方式有绳系消旋、网捕获消旋、机械手控消旋、激光消旋、电磁消旋等方式,绳系消旋、网捕获消旋、机械手控消旋本质属于接触式消旋,激光消旋属于非接触式消旋,但都是通过输入外力矩控制目标的姿态运动,电磁消旋是非接触式消旋,但作用力矩数量小,任务执行周期长。并且上述几种方式中需要多类功能载荷配合完成,功耗消耗大,对卫星的要求较高。
发明内容
本发明解决的技术问题是:针对于现阶段面向高轨故障目标可利用信息少,并且高轨观测平台可利用的探测载荷受限的情况下,无法获取有效的相对运动信息的情况,提供一种光学测量高轨慢旋失稳目标的编队卫星相对消旋系统及方法,并完成编队卫星对目标的相对消旋控制,且仅需要编队卫星应用光学载荷完成,对卫星要求低、消旋效率高且作用距离远,是一种对空间目标特定部位持续观测的很好手段。
本发明技术解决方案:光学测量高轨慢旋失稳目标的编队卫星相对消旋系统,包括光学信息测量和处理模块、目标运动信息反演模块、编队卫星相对消旋模块、编队卫星及目标动力学模块;其中:
光学信息测量和处理模块,完成对高轨慢旋失稳目标的光学成像,并从序列图象中连续提取目标亮度、目标在图像的大小和位置信息,得到目标的亮度变化曲线、目标像平面的位置坐标,并提供给目标运动信息反演模块;
目标运动信息反演模块,根据光学信息测量和处理模块得到的亮度变化曲线、目标在像平面的位置坐标,编队卫星及目标动力学模块输入的编队卫星间的相对距离,完成目标到编队卫星的相对距离实时解算、目标相对编队卫星的相对速度计算、目标在编队卫星光学载荷下的自旋信息统计反演及自适应加权计算,得到目标的自旋周期,并输出给编队卫星相对消旋模块;
编队卫星相对消旋模块,接收目标运动信息反演模块得到的目标运动信息反演模块得到自旋周期,目标和编队卫星的相对距离、目标和编队卫星的相对速度,以及编队卫星相对消旋期望共振比,实时计算多脉冲控制数量,编队卫星的实际速度矢量和期望速度矢量,生成编队卫星相对消旋期望脉冲控制指令,输入编队卫星及目标相对动力学模块;
编队卫星及目标动力学模块,仿真执行相对消旋脉冲控制指令,并通过状态转移计算,实现编队卫星对目标的联合相对消旋运动,通过星间通信,实时测量和计算编队卫星间的相对距离,并输出给目标运动信息反演模块;
在整个共振周期内完成整个相对消旋任务。
所述目标运动信息反演模块具体实现如下:
(1)接收目标在图像的大小和位置信息,提取目标质心并计算目标质心在图像的位置信息,基于目标在编队各卫星的单帧成像图像的位置信息,结合编队卫星间的相对测距信息,完成目标到编队卫星的相对距离实时解算;
(2)接收目标在图像的大小和位置信息,提取目标质心并计算目标质心在图像的位置信息,基于目标在编队各卫星的多帧成像图像的方位变化信息,结合目标到编队卫星间的相对距离信息,完成目标相对编队卫星的相对速度计算;
(3)接收目标亮度信息,在连续观测一段时间后,利用编队各卫星在目标成像过程中提取的亮度变化曲线,利用自相关分析,各卫星反演目标自转周期,利用互相关分析,计算编队双卫星间的相关时延,并利用目标、编队双卫星的几何关系计算编队双卫星、目标之间的角度,解算出基于双卫星计算的目标自旋周期,结合各卫星与目标的相对距离,相关时延,通过目标在编队卫星光学载荷下的自旋信息统计反演及自适应加权计算,得到目标的自旋周期。
所述编队卫星相对消旋模块具体实现如下:
(1)接收目标到编队各卫星的相对距离信息,基于相对距离信息、编队卫星相对消旋期望共振比自适应确定多脉冲数量,接收目标运动信息反演模块输出的目标自旋周期,计算编队卫星相对于目标的期望速度信息;
(2)基于多脉冲数目及任务周期,确定多脉冲的时间间隔,并计算时间间隔内目标与编队卫星在本体坐标系下的相对速度矢量,并结合目标的期望速度矢量计算编队卫星相对消旋期望脉冲控制指令。
本发明一种光学测量高轨慢旋失稳目标的编队卫星相对消旋方法,步骤如下:
(1)编队卫星首先对高轨慢旋失稳目标进行目标光学探测,获取目标的连续光学成像信息,并通过光学信息测量和处理提取目标亮度、目标在图像的大小和位置信息,得到目标的亮度变化曲线、目标像平面的位置坐标;目标亮度计算采用对目标分布的像平面内像元灰度累计积分,计算公式为:
light为目标的亮度值,Greypix每个相元的灰度值,Pixnum为目标所占相元数;
其中Hei为高低角,Azi为方位角,(x,y)为目标在像平面的位置坐标,θmax为光学载荷视场角,xmax为载荷像平面横轴的最大尺寸;
(2)根据提取得到的亮度变化曲线、目标在像平面的位置坐标,编队卫星及目标动力学模块输入的编队卫星间的相对距离,完成目标到编队卫星的相对距离实时解算、目标相对编队卫星的相对速度计算、目标在编队卫星光学载荷下的自旋信息统计反演及自适应加权计算,得到目标的自旋周期。动态加权反演目标的自旋周期,主要基于编队卫星自相关分析反演目标的自旋周期和互相关分析获取的相关时延加权计算。自相关分析获取目标自旋周期取自相关函数的最大时延,即max(R(t1,t2)),基于单卫星的目标自旋周期计算公式T1i=abs(t1i-t2i),i代表卫星1和卫星2,互相关函数获取目标自旋周期采用如下方法,当取max(R(t1,t2))时,设时延τ=abs(t1-t2),基于编队双卫星的自旋周期计算公式为 其中θ为编队卫星与目标之间的相对角度,θ为0到180度,优选30度到60度范围。
最终反演出目标自旋周期为:
其中D1,D2为目标与编队卫星之间的相对距离;
(3)根据目标运动信息反演得到的自旋周期,目标和编队卫星的相对距离、目标和编队卫星的相对速度,以及编队卫星相对消旋期望共振比,动态确定相对消旋控制脉冲数量,之后应用等时间、等角度多脉冲状态转移方法,依次确定一个自旋周期内在编队卫星本体坐标系下的各速度脉冲增量值,通过脉冲指令的执行,完成整个目标相对消旋控制过程,
脉冲时间间隔确定公式为:
其中n为期望共振比,N为脉冲数量,T为目标自旋周期;
速度增量计算公式为:
其中 分别为t1时刻施加脉冲前后的速度, 分别为t2时刻施加脉冲前后的速度;
(4)基于计算的各式可得速度脉冲的增量值,依次执行相对消旋脉冲控制指令,并通过状态转移计算,实现编队卫星对目标的联合相对消旋运动,状态转移计算公式为:
其中Φvρ、 Φρρ、Φvv分别为状态转移矩阵,ρ1和ρ2分别为脉冲变轨时刻目标和编队卫星的相对距离矢量,通过星间通信,实时测量和计算编队卫星间的相对距离,并输出给目标运动信息反演模块进行下一周期的全过程运行控制。
本发明与现有技术相比的优点在于:
(1)本发明提出了一种光学测量高轨慢旋失稳目标的编队卫星相对消旋新方法,此方法体出在前述的技术方案中。高轨慢旋失稳目标是一类非合作空间目标,传统的天基消旋方法都会在观测卫星搭载雷达、相机、导航装置等多类型测量和执行设备,其方法多为主动式探测及绝对式消旋。本发明仅通过编队卫星应用光学载荷完成目标的相对消旋控制,属于被动式探测和相对式消旋,时效性更高。
(2)本发明提出了一种基于光学测量的自适应反演目标自旋周期的方法,此方法体出在前述的技术方案中。天基观测高轨目标时,观测平台与目标距离较远,且由于星载计算能力的约束,传统的图像模板匹配方法无法再天基平台有效应用,使得目标姿态信息的获取非常困难。本发明利用光学测量的连续亮度信息变化,基于编队各卫星获取的亮度变化曲线分别反演和联合反演目标自旋信息,并结合编队卫星、目标的相对距离,设计一种无需先验信息的高置信度自适应动态加权方法解算目标的自旋周期的方法,解决了此问题。
附图说明
图1是本发明系统组成结构图;
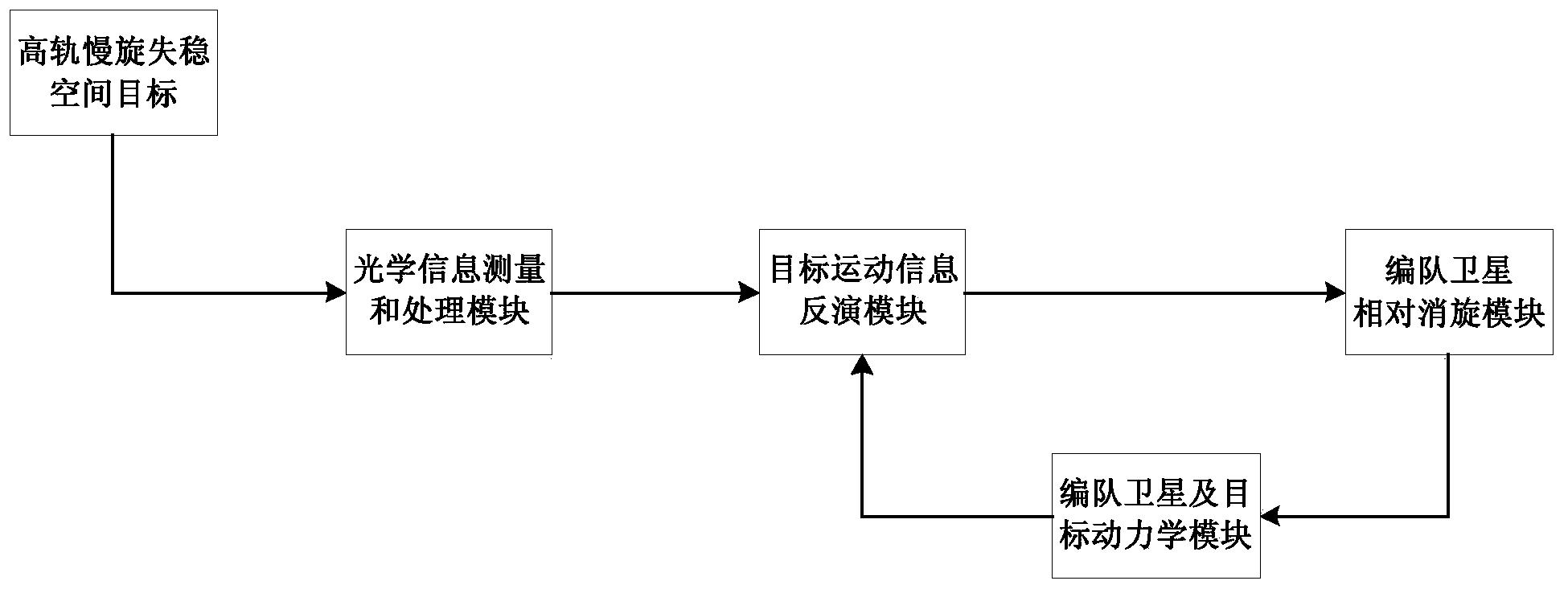
图2是本发明的系统原理图;
图3是本发明的目标运动信息反演过程;
图4是本发明的目标与编队卫星相对距离计算模型;
图5是本发明的相对消旋控制的原理图。
具体实施方式
以下结合技术方案和附图对本发明的具体实施方式进行说明。
如图1所示,本发明提供光学测量高轨慢旋失稳目标的编队卫星相对消旋系统及方法,包括光学信息测量和处理模块、目标运动信息反演模块、编队卫星相对消旋模块、编队卫星及目标动力学模块。
光学信息测量和处理模块,完成对高轨慢旋失稳目标的光学成像,并从序列图象中连续提取目标亮度、目标在图像的大小和位置信息,得到目标的亮度变化曲线、目标像平面的位置坐标,并提供给目标运动信息反演模块;
光学信息测量运行场景如图2所示,包括直线编队卫星,其中编队卫星包括光学成像载荷,对目标进行光学成像。目标亮度计算采用对目标分布的像平面内像元灰度累计积分,计算公式为:
light为目标的亮度值,Greypix每个相元的灰度值,Pixnum为目标所占相元数;
其中Hei为高低角,Azi为方位角,(x,y)为目标在像平面的位置坐标,θmax为光学载荷视场角,xmax为载荷像平面横轴的最大尺寸。
目标运动信息反演模块,根据光学信息测量和处理模块得到的亮度变化曲线、目标在像平面的位置坐标,编队卫星及目标动力学模块输入的编队卫星间的相对距离,完成目标到编队卫星的相对距离实时解算、目标相对编队卫星的相对速度计算、目标在编队卫星光学载荷下的自旋信息统计反演及自适应加权计算,得到目标的自旋周期,并输出给编队卫星相对消旋模块;
目标运动信息反演模块处理流程如图3所示。整个过程包括相对距离解算、相对速度计算和目标自旋信息的反演。
编队卫星与目标的三维几何关系如图4所示,图4表示编队卫星与目标不共面时且目标分布在编队卫星两侧时的三维空间下的几何关系图。该几何构型下计算公式为:
d为目标投影与编队间卫星的垂直距离,Azi为方位角,SatDis为编队卫星间距离;
D为目标与编队间卫星的垂直距离,Hei为高低角
在不考虑编队卫星姿态变化的情况下,基于连续两帧或多帧图像确定目标相对速度。设t1时刻目标质心在图像中的位置为(x1,y1),t2时刻目标质心在图像中的位置为(x2,y2)目标在观测平台本体坐标系的相对速度计算公式为:
其中Cbody2p为平台成像坐标系到观测本体坐标系的转换矩阵。
动态加权反演目标的自旋周期,主要基于编队卫星自相关分析反演目标的自旋周期和互相关分析获取的相关时延,设编队卫星获取的亮度函数分别为X1(t)、X2(t),根据实际的物理运动过程,亮度曲线获取过程可视为随机过程,其自旋周期计算公式包括:
自相关分析获取目标自旋周期取自相关函数的最大时延,即max(R(t1,t2));
基于单卫星的目标自旋周期计算公式为T1i=abs(t1i-t2i),i代表卫星1和卫星2;
互相关函数获取目标自旋周期采用如下方法。当取max(R(t1,t2))时,设时延τ=abs(t1-t2),基于编队双卫星的自旋周期计算公式为 其中θ为编队卫星与目标之间的相对角度(角度理论范围为0到180度)。
最终反演出目标自旋周期为:
其中D1,D2为目标与编队卫星之间的相对距离。
编队卫星相对消旋模块,接收目标运动信息反演模块得到的目标运动信息反演模块得到自旋周期,目标和编队卫星的相对距离、目标和编队卫星的相对速度,以及编队卫星相对消旋期望共振比,实时计算多脉冲控制数量,编队卫星的实际速度矢量和期望速度矢量,生成编队卫星相对消旋期望脉冲控制指令,输入编队卫星及目标相对动力学模块;
编队卫星相对消旋模块如图5所示,该框图描述的过程是一个典型的开环控制过程。首先基于目标的自旋周期、期望共振比和编队卫星、目标的相对距离,动态确定相对消旋控制脉冲数量,由于目标的非合作特点,之后应用等时间、等角度多脉冲状态转移方法,依次确定一个自旋周期内在编队卫星本体坐标系下的各速度脉冲增量值,通过脉冲指令的执行,完成整个目标相对消旋控制过程。
脉冲时间间隔确定公式为:
其中n为期望共振比,N为脉冲数量,T为目标自旋周期;
速度增量计算公式为:
其中 分别为t1时刻施加脉冲前后的速度, 分别为t2时刻施加脉冲前后的速度。
编队卫星及目标动力学模块,仿真执行相对消旋脉冲控制指令,并通过状态转移计算,实现编队卫星对目标的联合相对消旋运动,通过星间通信,实时测量和计算编队卫星间的相对距离,并输出给目标运动信息反演模块。其状态转移计算公式为:
其中Φvρ、 Φρρ、Φvv分别为状态转移矩阵,ρ1和ρ2分别为脉冲变轨时刻目标和编队卫星的相对距离矢量。
本发明未详细阐述部分属于本领域公知技术。
提供以上实施例仅仅是为了描述本发明的目的,而并非要限制本发明的范围。本发明的范围由所附权利要求限定。不脱离本发明的精神和原理而做出的各种等同替换和修改,均应涵盖在本发明的范围之内。
一种光学测量高轨慢旋失稳目标的编队卫星相对消旋系统及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0